內置式永磁同步電機恒流頻比控制改進策略
2023-10-25 02:49:20張文遠韓福強楊冬鵬張本軒
汽車電器 2023年10期
關鍵詞:控制策略
張文遠, 韓福強, 苗 強, 楊冬鵬, 張本軒
(濰柴動力股份有限公司, 山東 濰坊 261061)
電機運行在中高速時,傳統滑模觀測法對轉子位置的估測比較準確[1],觀測器是基于三相永磁同步電機(PMSM)基波模型進行測算的,因此當電機在中低速時難以對轉子位置進行精確地檢測[2]。為克服滑模觀測器在零低速不能有效估計轉子位置的缺點,使PMSM能正常啟動,需要使用其他的控制策略來啟動電機[3]。現有PMSM啟動方法有恒壓頻比(V/f) 控制、恒流頻比(I/f) 控制等。與V/f控制相比,I/f控制通過轉矩和功率角之間的自穩定來實現PMSM的穩定啟動,通過調節電流可以有效防止電流過流,具有一定的抗干擾能力[4]。
1 傳統I/f控制策略
I/f控制是一種根據轉矩-轉速特性,設置適當的電流-頻率比以追求高運行效率的控制策略[5]。相比于V/f控制的全開環控制結構,I/f控制的電流閉環、速度開環結構,可以有效防止過流現象的發生[6]。
永磁同步電機的電磁轉矩公式可寫為
式中:Te——電磁轉矩;Pn——磁極對數;iq、id——電機q軸電流、d軸電流;Ld、Lq——d軸電感、q軸電感;Ψf——永磁體磁鏈。
如圖1所示,d、q軸為真實轉子位置構建的兩相旋轉坐標系,d*、q*軸為由給定需求角速度積分得到的轉子位置構建的兩相旋轉虛擬坐標系。在傳統I/f控制過程中,給定q*軸參考電流iq*,d*軸參考電流id*=0,q*軸與q軸之間存在一個θL的夾角,當q*軸與q軸重合時θL=0°,當q*軸與d軸重合時θL=90°,實際電流id、iq是iq*在d、q軸上的投影[7]。
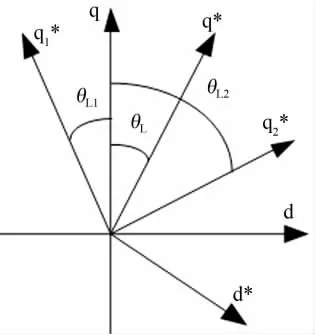
圖1 I/f運行向量圖
當Ld=Lq時,電磁轉矩方程公式可以簡化為:
通過預定位,使電機啟動時d軸與虛擬q*軸重合,此時θL=90°。當θL在[0,90°]區間內變化,給定的需求轉速大于實際轉速時,由于負載的存在,實際轉速不足以跟隨需求轉速,導致θL減小、Te增大,迫使轉子加速運轉;相反,當給定的需求轉速小于實際轉速時,θL增大、Te減小,當轉矩小于負載后,轉子轉速下降。這個過程就是“轉矩-功角自平衡”原理,通過這種動態調節能力,I/f控制可以實現動態轉速控制。I/f運行向量如圖1所示。
2 內置式永磁同步電機I/f控制策略
2.1 轉矩-功角自平衡穩定區間
當Ld≠Lq時,電磁轉矩方程公式為:
此時給定的iq*在d、q坐標系分配的電流id、iq對電磁轉矩均存在作用,無法忽略簡化。
對公式(3)兩邊θL求導可得:
令Te'=0可得:
對公式(5)進一步簡化可求得:
式中:θL1——第一象限區域輸出最大負轉矩對應的角度極值點;θL2——第二象限區域最大轉矩電流比(MTPA) 對應的角度極值點。
[θL2θL1]為轉矩-功角自平衡穩定區間,分別將其代入電磁轉矩公式(3)求得Temax、Temin,在iq*=35A、iq*=50A時按照公式(6)和公式(7)求出的θL1、θL2(圖2),給定iq*大小不同,轉矩-功角自平衡穩定區間不同,穩定時能夠承載的負載范圍也不同。
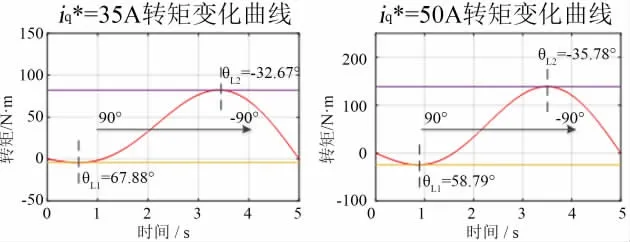
圖2 電磁轉矩隨θL變化曲線
傳統I/f控制策略在電機啟動時使d軸與虛擬q*軸重合,即θL=90°,為防止電機在負轉矩區域反向轉動,負載不能低于|Temin|;轉矩-功角自平衡為一個動態過程,當θL=θL2時,動態變化過程中容易出現θL<θL2造成失衡,需要預留一段空間,給定iq*能夠承載的負載轉矩范圍為:
式中:TL——機械負載轉矩;Temin、Temax——轉矩-功角自平衡穩定區間內最大輸出負轉矩、最大輸出正轉矩。
2.2 I/f啟動ωref界限分析
穩態工況下,PMSM的定子電壓um為:
式中:um——定子電壓;R——定子電阻;ωe——轉子電角速度。
忽略定子電阻R上的壓降,近似可以得到:
式中:ulim——定子電壓極限值ulim。
當給定iq*,在轉矩-功角自平衡穩定區間[θL2θL1]內,穩定時的轉子電角速度ωe為:
根據定子電壓極限值ulim,可得到在[θL2θL1]區間內存在的最大電角速度為ωemax,可以維持穩定狀態的給定需求角速度ωref范圍為:
2.3 轉速斜率梯度
由于啟動時轉子實際轉速是逐漸上升的,直接給定需求電角速度ωref,實際轉速過低,容易導致θL減小、輸出扭矩快速變大,迫使實際轉速迅速增加,直至超過需求轉速,使θL增大,在這個過程中轉速會產生嚴重振蕩,經歷多次振蕩以后逐漸達到平衡。嚴重時,當θL變化跨過平衡區域,則會導致失步運行。可以使ωref按照斜率梯度kω上升來避免需求電角速度過大造成的振蕩,ωref與斜率梯度kω、時間t之間的關系式為:
根據機械運動方程可以得到斜率梯度kω為:
式中:J——轉動慣量;α——加速度;ωm——轉子機械角速度;ωe——轉子電角速度;ωref——給定需求電角速度。
2.4 角度補償法
傳統I/f控制策略在θL=90°時啟動,經過負轉矩區后開始進入自平衡穩定區間;當負載過低時,容易產生較長時間的轉速振蕩,嚴重時甚至會造成反轉失步。通過在I/f積分角度θIF基礎上進行角度補償,如圖3所示,使q*軸與d軸夾角為θb進行啟動,避免負轉矩區間的影響,補償后的I/f角度θIFB為:

圖3 角度補償法運行向量圖
如2.3小節分析,負載過大時,在啟動開始的一段時間內,需求轉速不斷按照梯度增加,而實際轉速過低,容易造成轉速振蕩或失步,可以對I/f積分的角度θIF進一步補償,使其在平衡角度附近10°范圍內開始啟動,補償角度θb范圍為:
式中:θTL——達到穩定時的平衡角度。
通過給定is*與給定角度φ啟動可以實現等效角度補償,如圖3所示,實際電流id、iq是is*在d、q軸上的投影,通過設定夾角φ來實現快速穩定啟動,當φ=0°時,等效于給定iq*不補償角度,設定夾角φ的范圍與補償角度θb范圍一致。
3 I/f啟動控制策略仿真分析
本文基于Matlab/Simulink 仿真平臺對改進的I/f啟動進行仿真驗證,電機仿真參數如表1所示。

表1 電機仿真參數
給定q*軸電流iq*=300A、負載TL=50N·m、斜率梯度kω=1×104,通過角度補償法使啟動時θL=56°,即θb=34°,如圖4所示,在達到轉速平衡的過程中產生了振蕩,平衡時θL=18.7°,θTL=71.3°。

圖4 θL=56°啟動時轉速和θL變化波形
對I/f積分角度進一步補償,使啟動時θL=10°,即θb=80°,啟動時接近負載50N·m對應的“轉矩-功角自平衡”點,如圖5所示,轉速變化更加平緩,最終平衡時角度相同,θL=18.7°。
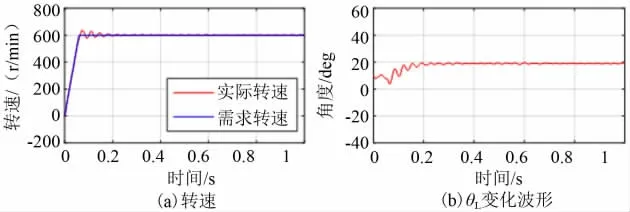
圖5 θL=10°啟動時轉速和θL變化波形
4 結論
通過對內置式永磁同步電機I/f啟動控制策略的分析,說明角度補償法可以避免啟動時產生負轉矩,降低反轉、失步風險,使需求電角速度與實際電角速度同步變化,轉速過渡過程更加平滑。改進的I/f啟動控制策略具有良好的性能和可靠性。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
