
基于Visual Components的智能制造產線虛實結合調試平臺的開發
2023-10-26 00:50:48朱紅娟朱承平
無線互聯科技 2023年15期
朱紅娟,朱承平
(南京機電職業技術學院,江蘇 南京 210046)
0 引言
隨著《中國制造2025》文件正式發布,高新科技行業急需高層次技術研發、管理、操作、維修等各類產業人才,因此各高校加強智能制造相關學科專業建設。目前,智能制造傳統實訓存在以下問題:(1)成本高。根據高校現有的實訓條件,很多智能制造相關實訓任務無法完成。(2)實訓效果不理想。實訓設備更新緩慢,無法滿足產業轉型升級的需要,同時實訓設備不足,實訓資源差。(3)專業教師嚴重缺乏。實訓教學需要一批專業素質高、實訓指導經驗豐富的雙師型教師,而目前部分學校雙師型教師少,實訓效果不理想。
數字孿生技術可以將實訓室已有的設備本體虛擬到仿真軟件中,保留其原有的控制系統以及機電系統,在仿真軟件中對智能制造產線進行調試優化,再在真實的智能制造產線上驗證,既能減少現場調試帶來的風險,又解決了傳統實訓設備“不足”“不直觀”“成本高”等難題。
1 虛實結合調試平臺架構
Visual Components軟件簡稱 VC,是一款智能制造3D數字化工廠仿真軟件,由芬蘭的一家的3D制造仿真和可視化軟件開發公司于2017 年首次推出。VC平臺能夠提供一系列工業機器人模型和組件庫,讓用戶能夠快速高效組合出任意復雜度的工業生產3D模型場景,構建工廠內部的整體可視化方案。VC 軟件所搭建的智能制造產線場景中3D模型自然逼真,能夠與真實產線中的設備結合,從而利用模擬場景來實現真實產線的生產狀況[1]。
虛實結合調試平臺是對虛擬調試技術的擴展,將虛擬調試中的虛擬控制器替換成真實的控制設備,使用真實控制設備中的數據來驅動虛擬模型。在PC機中通過VC軟件中加載的組件庫以及其他三維設計軟件中繪制的3D模型來搭建智能制造產線,按照真實產線控制要求在虛擬場景中設置相對應的傳感器和執行器。通信模塊實現真實的PLC與虛擬場景之間的通信,為虛擬場景與PLC提供數據接口。VC軟件中采用OPC UA協議的軟件服務器完成PLC與計算機之間數據的轉換與傳輸[2],如圖1所示。
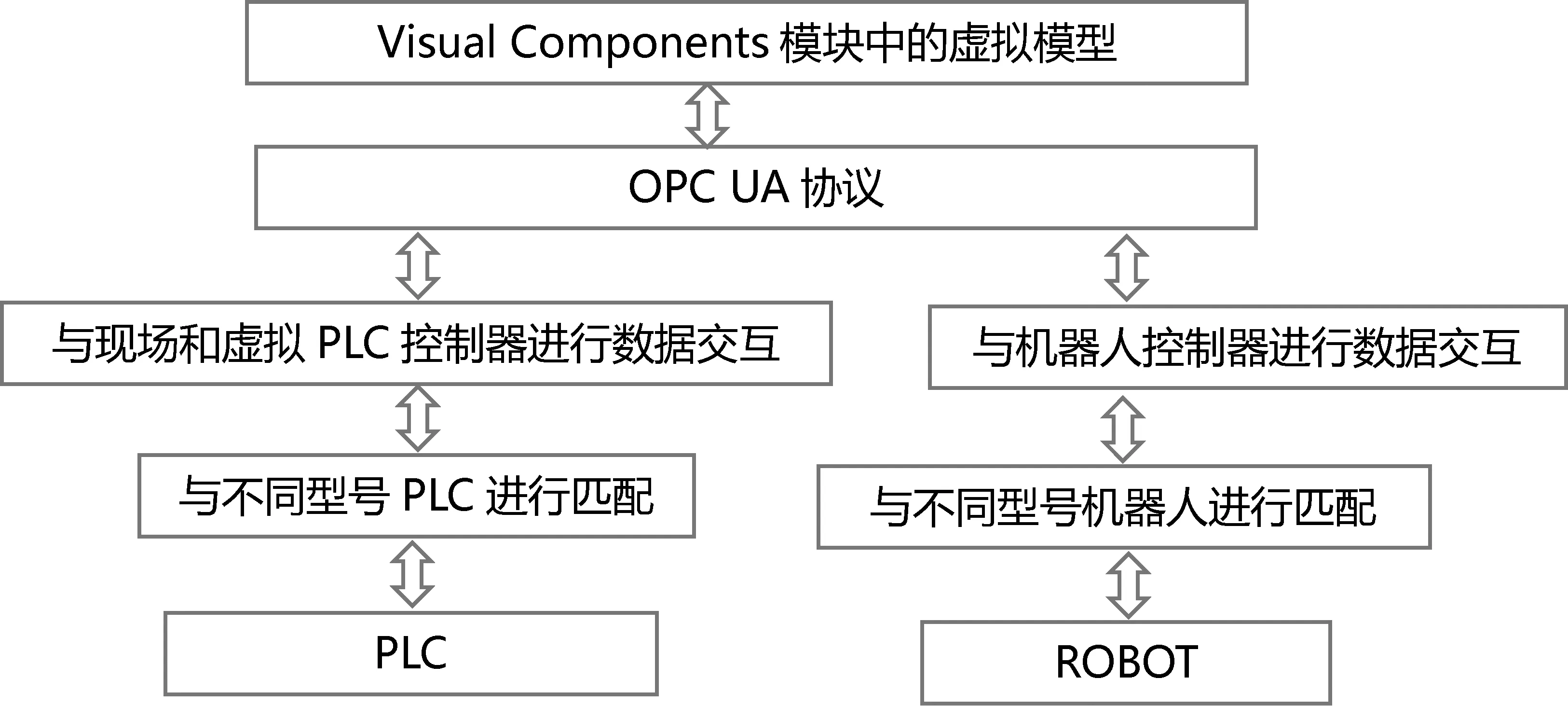
圖1 虛實調試框架
2 虛擬環境的搭建
2.1 虛擬場景的設計
分析智能制造產線的工藝過程和加工流程,在Visual Components軟件中完成產線各個工作站(人工上料、機器人焊接、傳動帶輸送、機器人搬運、視覺檢測、AGV小車運輸)的搭建,如圖2所示。

圖2 產線各個工作站
2.2 流程創建
建立工業機器人、工作站之間的邏輯連接、參數設置和流程。各工作站之間的流程如圖3所示。

圖3 各工作站之間的流程
2.3 仿真運行
點擊“開始仿真”按鈕,觀察整條生產線的流程與節拍,如有不當之處,可修改參數進行調整,對智能制造產線進行優化,直至可正常模擬整個生產過程[3]。
在VC上虛擬仿真成功后,與真實智能制造產線通信,通過操作虛擬調試系統的人機交互模塊控制智能制造產線中智能設備的信號實現對智能生產線的控制,首次上電運行即可正常執行智能制造產線的所有邏輯動作和工藝流程[4],同時通過觀察模型的反饋信號可以及時發現產線的故障,從而有效防止生產事故發生。
3 虛實調試
將PLC、機器人和PC通過以太網連接,建立虛擬仿真系統與實際產線之間的映射,讓兩個系統之間的運行狀態和數據信息進行實時交互,啟動虛實聯調系統,從而實現“以實控虛,以虛控實”的效果,從而對生產現場進行監控和故障診斷。
3.1 PLC與仿真系統連接
啟動 PLC 并處于 STOP 模式。通過顯示屏設置 CPU 的 IP 地址和子網掩碼。點擊“設置”>> “地址”>>接口“X1 (IE/PN)” >>“IP 地址”設置 IP 地址 192.168.0.10。
打開Visual Components仿真軟件,點擊連通性菜單,在工具欄點擊“添加服務器”,然后在地址欄輸入機器人控制器地址“192.168.0.10”,點擊“測試連接”,彈出“連接成功”對話框,點擊“確定”關閉對話框,如圖4所示。
3.2 機器人與仿真系統連接
用一根網線連接Visual Components仿真軟件所在電腦與ABB機器人控制器。打開機器人示教器,依次點擊控制面板>>配置>>IP Setting下配置ABB機器人總線通信IP地址,如圖5所示機器人IP地址為“192.168.0.5”。
打開Visual Components仿真軟件,點擊連通性菜單,在工具欄點擊“添加服務器”,然后在地址欄輸入機器人控制器地址“192.168.0.5”,點擊“測試連接”,彈出“連接成功”對話框,點擊“確定”關閉對話框,如圖6所示。

圖6 “連接成功”對話框
根據工藝流程,通過西門子Protal軟件編制PLC程序,將程序下載到PLC控制設備中,本實施例中PLC為西門子S7-1500。打開子Protal編程軟件,設置屬性>>以太網地址,設置設備IP地址。
3.3 虛實調試
在Visual Components仿真軟件配置連接插件,選擇所需插件,點擊添加服務器,創建控制虛擬模型自動運行所需的輸入輸出變量。本例中傳感器用作輸入,因此傳感器將數據從模擬發送到服務器(PLC),而電機信號是輸出,因此電機控制信號從服務器發送到模擬。
首先在左側“模擬至服務器”方向上展開傳感器,然后選擇“SensorBooleanSignal”。選擇信號后,用戶可以從右側選擇相應的PLC變量“conveyor sensor”。按“選中對”按鈕將變量配對在一起。模擬變量左側的鏈接圖標表示配對成功。
這樣將虛擬模型變量與虛實融合調試系統中創建的變量一一映射起來,啟動仿真,即可實現虛實結合調試[5-6]。
4 結語
本文提出了一種面向數字孿生的智能制造產線虛實結合調試平臺,基于Solidworks三維設計軟件和VC平臺搭建智能制造產線虛擬仿真系統,利用PLC編程軟件進行程序設計和觸摸屏界面設計,通過PROFINET總線對工業機器人、觸摸屏進行網絡集成控制,利用OPC UA通信接口,建立虛擬產線與真實產線之間的數據交互,實現用采集到的實際運行數據驅動數字虛擬模型,以數字虛擬模型控制實體樣機的運行狀態的控制方法。
猜你喜歡
裝備制造技術(2020年12期)2020-05-22 09:25:38
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年12期)2018-08-01 00:47:44
制造技術與機床(2017年6期)2018-01-19 02:41:21
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年19期)2017-02-02 07:08:38
當代化工研究(2016年6期)2016-03-20 16:21:46
