小半徑曲線連續(xù)剛構(gòu)轉(zhuǎn)體橋雙向稱(chēng)重與配重方案*
2023-10-27 07:32:32張付林王銀輝
施工技術(shù)(中英文) 2023年18期
關(guān)鍵詞:橋梁結(jié)構(gòu)
張付林,汪 東,王銀輝,陳 闖
(1.寧波市軌道交通集團(tuán)有限公司,浙江 寧波 315101; 2.中鐵四局集團(tuán)有限公司,安徽 合肥 230023; 3.浙大寧波理工學(xué)院土木建筑工程學(xué)院,浙江 寧波 315100)
0 引言
近年來(lái),轉(zhuǎn)體橋梁結(jié)構(gòu)體系不斷豐富,橋梁跨徑和轉(zhuǎn)體質(zhì)量不斷增大,不對(duì)稱(chēng)、變寬度、曲線橋梁等各種橋梁特點(diǎn)在轉(zhuǎn)體施工中疊加,使得橋梁平轉(zhuǎn)施工技術(shù)難度不斷增大,也促進(jìn)了平轉(zhuǎn)施工技術(shù)的迅速發(fā)展[2-6]。無(wú)論何種橋梁,確保轉(zhuǎn)體結(jié)構(gòu)處于平衡狀態(tài)是平轉(zhuǎn)施工的關(guān)鍵,為此,轉(zhuǎn)體結(jié)構(gòu)的不平衡稱(chēng)重試驗(yàn)和配重是轉(zhuǎn)體施工的關(guān)鍵技術(shù)之一,得到技術(shù)界廣泛關(guān)注[5-8],并不斷有新的技術(shù)探索和嘗試[8-9],包括三維激光掃描技術(shù)的應(yīng)用[10]。
當(dāng)橋面線形為平曲線時(shí),連續(xù)剛構(gòu)橋受曲率影響,因施工誤差導(dǎo)致的轉(zhuǎn)動(dòng)體順橋向偏心的同時(shí)也會(huì)伴隨橫橋向偏心,形成雙向不平衡[6]。曲線半徑越小,跨徑越大,這種偏離程度會(huì)越突出,所以,對(duì)于曲線半徑較小、跨徑較大(轉(zhuǎn)體結(jié)構(gòu)懸臂長(zhǎng))的橋梁,轉(zhuǎn)體結(jié)構(gòu)平衡稱(chēng)重更加需要關(guān)注。所以,轉(zhuǎn)體施工前需對(duì)結(jié)構(gòu)進(jìn)行順橋向和橫橋向的平衡稱(chēng)重,在此稱(chēng)為“雙向不平衡稱(chēng)重”。
寧波市軌道交通4號(hào)線跨越杭甬客運(yùn)專(zhuān)線的曲線連續(xù)剛構(gòu)橋,是一座曲率半徑350m、轉(zhuǎn)體結(jié)構(gòu)單側(cè)懸臂長(zhǎng)度86m的大跨小半徑曲線轉(zhuǎn)體橋梁。本文以該工程為例,提出雙向不平衡稱(chēng)重方案和配重方法,推導(dǎo)了相應(yīng)的計(jì)算公式,可為類(lèi)似橋梁轉(zhuǎn)體施工提供參考和借鑒。
1 工程概況
1.1 工程簡(jiǎn)介
寧波市軌道交通4號(hào)線上跨既有杭深客運(yùn)專(zhuān)線、蕭甬鐵路的節(jié)點(diǎn)橋,是一座轉(zhuǎn)體施工的小曲率半徑預(yù)應(yīng)力混凝土連續(xù)剛構(gòu)橋,橋面上行線路中心線曲率半徑為350m,橋跨布置為(68+138+95)m,采用懸臂澆筑結(jié)合平轉(zhuǎn)轉(zhuǎn)體的施工方法。由于合龍位置需避開(kāi)鐵路線正上方,橋跨不對(duì)稱(chēng)布置,2個(gè)轉(zhuǎn)體T構(gòu)的懸臂長(zhǎng)度分別為50m(27號(hào)墩T構(gòu))和86m(28號(hào)墩T構(gòu)),主梁頂板寬11m、底板寬7m,27號(hào)墩T構(gòu)梁高5~9m,28號(hào)墩T構(gòu)梁高5~12m,均按1.8次拋物線變化,如圖1所示。

圖1 橋型布置(單位:m)

圖2 橋墩構(gòu)造(單位:m)
受平曲率影響,轉(zhuǎn)體T構(gòu)重心偏離墩頂主梁截面中心線,為了確保轉(zhuǎn)動(dòng)鉸中心與轉(zhuǎn)體T構(gòu)重心重合,轉(zhuǎn)動(dòng)鉸中心向曲線內(nèi)弧側(cè)偏移0.8m(27號(hào)墩T構(gòu))和2.2m(28號(hào)墩T構(gòu)),橋墩設(shè)計(jì)成曲線外側(cè)直立、曲線內(nèi)側(cè)自梁底到承臺(tái)頂傾斜的變截面墩身,如圖 2所示。
27號(hào)墩T構(gòu)轉(zhuǎn)盤(pán)直徑12.0m,球鉸支撐半徑1.5m,球鉸的球心半徑7.0m,滑道半徑4.5m,滑道上方設(shè)8組撐腳,撐腳高度0.8m;28號(hào)墩T構(gòu)轉(zhuǎn)盤(pán)直徑15.0m,球鉸支撐半徑2.0m,球鉸的球心半徑8m,滑道半徑6.0m,滑道上方設(shè)8組撐腳,撐腳高度0.8m,如圖3所示,撐腳設(shè)在轉(zhuǎn)體結(jié)構(gòu)順橋向和橫橋向軸線及轉(zhuǎn)盤(pán)的1/8點(diǎn)(對(duì)角線)上。27,28號(hào)墩轉(zhuǎn)體結(jié)構(gòu)理論自重分別為81 626,156 013kN。
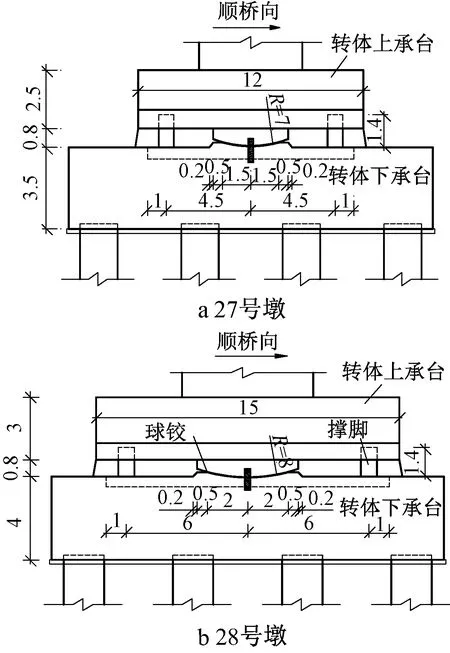
圖3 轉(zhuǎn)動(dòng)鉸構(gòu)造示意(單位:m)
1.2 主要問(wèn)題分析
由于平面曲率的影響,在箱梁懸臂澆筑過(guò)程中梁體重心可能產(chǎn)生雙向累積誤差,即梁體重心在順橋向產(chǎn)生偏差的同時(shí),也可能在橫橋向產(chǎn)生偏差,從而形成有別于直線橋梁的雙向偏心。平曲線曲率半徑越小,橫橋向偏心的可能性會(huì)越大。所以,曲線橋梁需進(jìn)行雙向不平衡稱(chēng)重,即進(jìn)行順橋向和橫橋向2個(gè)方向的稱(chēng)重試驗(yàn)。
同樣,順橋向配重也會(huì)使橫橋向產(chǎn)生偏心,所以根據(jù)稱(chēng)重結(jié)果進(jìn)行雙向配重時(shí),同樣需統(tǒng)籌考慮配重方案和效果。
依托項(xiàng)目曲線半徑350m,轉(zhuǎn)體結(jié)構(gòu)最大懸臂長(zhǎng)度達(dá)86m,相當(dāng)于跨徑175m的連續(xù)剛構(gòu)橋梁的懸臂長(zhǎng)度,為當(dāng)前轉(zhuǎn)體橋梁中梁長(zhǎng)與半徑之比最大的轉(zhuǎn)體曲線橋梁。本文結(jié)合該項(xiàng)目的轉(zhuǎn)體稱(chēng)重、配重過(guò)程詳細(xì)介紹小半徑曲線橋梁的雙向不平衡稱(chēng)重和雙向配重的方法。
2 雙向不平衡稱(chēng)重原理
2.1 轉(zhuǎn)體結(jié)構(gòu)平衡狀態(tài)分析
受曲率影響,曲線橋梁在順橋向和橫橋向均會(huì)因施工誤差產(chǎn)生偏心,為獲得雙向偏心距以便確定配重方案,需對(duì)轉(zhuǎn)動(dòng)體進(jìn)行順橋向和橫橋向2個(gè)方向的稱(chēng)重。目前轉(zhuǎn)動(dòng)體不平衡力矩計(jì)算應(yīng)用最廣的依然是球鉸轉(zhuǎn)動(dòng)法[5-6],在上、下轉(zhuǎn)盤(pán)間施加頂升力使得上、下球鉸形成微小豎向轉(zhuǎn)動(dòng)(非平轉(zhuǎn),下文未注明均簡(jiǎn)稱(chēng)“剛體轉(zhuǎn)動(dòng)”),獲得不平衡力矩及摩擦系數(shù)。由于球鉸中心對(duì)稱(chēng),可假定轉(zhuǎn)體結(jié)構(gòu)繞球鉸中心發(fā)生任意方向剛體轉(zhuǎn)動(dòng)時(shí),其最大靜摩擦系數(shù)一致,即球鉸最大靜摩擦力矩MZ相同。
如圖4所示,設(shè)轉(zhuǎn)體結(jié)構(gòu)順橋向不平衡力矩為MGS,橫橋向不平衡力矩為MGH,合力矩為MG。
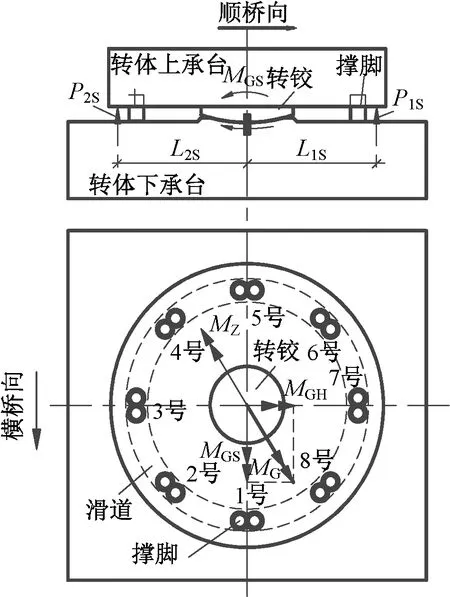
圖4 轉(zhuǎn)動(dòng)體系平衡狀態(tài)分析示意
由圖4可見(jiàn),轉(zhuǎn)體結(jié)構(gòu)平衡狀態(tài)可能出現(xiàn)以下幾種實(shí)際情況:①轉(zhuǎn)體結(jié)構(gòu)不平衡合力矩MG小于球鉸摩阻力矩MZ,此時(shí),轉(zhuǎn)體結(jié)構(gòu)不會(huì)發(fā)生繞球鉸任何方向剛體轉(zhuǎn)動(dòng),無(wú)撐腳著地;②轉(zhuǎn)體結(jié)構(gòu)僅1個(gè)軸向不平衡力矩較大導(dǎo)致合力矩MG大于球鉸最大摩阻力矩MZ,此時(shí),轉(zhuǎn)體結(jié)構(gòu)一個(gè)方向上會(huì)發(fā)生繞球鉸的剛體轉(zhuǎn)動(dòng),一側(cè)撐腳著地,另一個(gè)方向則無(wú)剛體轉(zhuǎn)動(dòng),撐腳不著地,若圖4中MGS較大而MGH較小,則轉(zhuǎn)體結(jié)構(gòu)發(fā)生順橋向剛體轉(zhuǎn)動(dòng),導(dǎo)致3號(hào)撐腳著地;③轉(zhuǎn)體結(jié)構(gòu)2個(gè)方向的不平衡力矩均較大導(dǎo)致合力矩大于球鉸最大摩阻力矩MZ,此時(shí),轉(zhuǎn)體結(jié)構(gòu)在對(duì)角線方向發(fā)生繞球鉸的剛體轉(zhuǎn)動(dòng),則可能對(duì)角線上撐腳乃至2個(gè)撐腳著地,如圖4中出現(xiàn)2號(hào)撐腳著地,且可能伴隨1號(hào)或3號(hào)撐腳同時(shí)著地。對(duì)平衡狀態(tài)的預(yù)判是進(jìn)行雙向稱(chēng)重試驗(yàn)的基礎(chǔ)。
2.2 不平衡合力矩小于球鉸摩阻力矩
當(dāng)解除轉(zhuǎn)體結(jié)構(gòu)臨時(shí)鎖定后,若雙向均不發(fā)生繞球鉸的剛體轉(zhuǎn)動(dòng),所有撐腳均未著地,則可判斷轉(zhuǎn)體結(jié)構(gòu)球鉸摩阻力矩大于不平衡合力矩。
首先選擇一個(gè)方向進(jìn)行稱(chēng)重試驗(yàn)。假定選擇順橋向,分別在左、右兩側(cè)頂升上轉(zhuǎn)盤(pán),如圖4所示,并記錄頂升力-位移曲線。分別記錄轉(zhuǎn)體的位移曲線突變時(shí)的頂升力P1S和P2S,與常規(guī)稱(chēng)重方法一樣,分別通過(guò)平衡方程得到順橋向不平衡力矩MGS和摩阻力矩MZ:
(1)
(2)
然后在另一方向(橫橋向)進(jìn)行稱(chēng)重試驗(yàn)。選擇其中一側(cè)(圖4中1號(hào)撐腳位置)頂升上轉(zhuǎn)盤(pán),同時(shí)記錄頂升力-位移曲線。記錄轉(zhuǎn)體的位移曲線發(fā)生明顯突變的頂升力P1H,則可得到橫橋向不平衡力矩MGH:
MGH=MZ-P1H·L1H
(3)
可見(jiàn),由于任意方向剛體轉(zhuǎn)動(dòng)時(shí)摩阻力矩相等,MZ已由前一次稱(chēng)重試驗(yàn)的式(2)得到,所以該方向的稱(chēng)重?zé)o須2側(cè)分別頂升。
2.3 不平衡合力矩大于球鉸摩阻力矩
當(dāng)解除球鉸的臨時(shí)鎖定后,若轉(zhuǎn)體結(jié)構(gòu)發(fā)生繞球鉸的剛體轉(zhuǎn)動(dòng),有撐腳著地,則可判斷轉(zhuǎn)體結(jié)構(gòu)不平衡合力矩大于球鉸摩阻力矩。此時(shí),可能存在2種情況,即不平衡狀態(tài)②和③。這2種情況的雙向不平衡稱(chēng)重方式和計(jì)算方法基本一致。
假設(shè)在不平衡合力矩作用下,圖4所示轉(zhuǎn)體結(jié)構(gòu)的對(duì)角線上2號(hào)撐腳著地,且3號(hào)撐腳伴隨著地,則可判斷MGS影響更大,所以可選擇在3號(hào)撐腳位置先頂升,當(dāng)轉(zhuǎn)體結(jié)構(gòu)發(fā)生微小剛體轉(zhuǎn)動(dòng)時(shí),頂升力-位移曲線出現(xiàn)突變,記錄頂升力P2S,然后千斤頂卸載,通過(guò)頂升力-位移曲線判斷轉(zhuǎn)體結(jié)構(gòu)發(fā)生反向剛體轉(zhuǎn)動(dòng)時(shí)的頂升力為P′2S, 與常規(guī)稱(chēng)重方法一樣,根據(jù)這2個(gè)時(shí)刻的平衡方程,可得到不平衡力矩MGS和摩阻力矩MZ:
(4)
(5)
然后在另一方向(橫橋向)進(jìn)行稱(chēng)重試驗(yàn)。采用與2.2節(jié)相同步驟,在1號(hào)撐腳頂升,得到與式(3)相同的橫橋向不平衡力矩MGH。
如果僅3號(hào)撐腳落地,可采取前面相同的方法,如果僅2號(hào)撐腳落地,則第1次稱(chēng)重可選擇順橋向(3號(hào)撐腳位置頂升),也可選擇橫橋向(2號(hào)撐腳位置頂升),但在稱(chēng)重前作可能的不平衡力矩方向判斷非常重要(見(jiàn)3.1節(jié))。同時(shí),需要注意的是,當(dāng)一個(gè)方向頂升時(shí),需對(duì)另一個(gè)方向需做好保護(hù)。
2.4 偏心距
根據(jù)上述計(jì)算結(jié)果,可得到順橋向和橫橋向偏心距eS,eH:
(6)
(7)
式中:G為轉(zhuǎn)體結(jié)構(gòu)自重。
轉(zhuǎn)體結(jié)構(gòu)合偏心距e:
(8)
由于轉(zhuǎn)體結(jié)構(gòu)的合偏心距大于2個(gè)方向的偏心距,所以,在曲線橋梁轉(zhuǎn)體結(jié)構(gòu)偏心距控制時(shí),應(yīng)以合偏心距為控制目標(biāo)。
靜摩擦系數(shù)μ[6,8]計(jì)算如下:
(9)
式中:R為球鉸球面半徑;μ為球鉸靜摩擦系數(shù)。
3 稱(chēng)重及配重
3.1 平衡狀態(tài)判別
在轉(zhuǎn)體結(jié)構(gòu)的臨時(shí)鎖定解除前,在順橋向、橫橋向4個(gè)撐腳處(即圖4中的1,3,5,7號(hào))撐腳旁布置位移傳感器;在逐步解除臨時(shí)支撐過(guò)程中連續(xù)測(cè)量讀數(shù),觀察撐腳隨臨時(shí)鎖定拆除的位移,判斷轉(zhuǎn)體結(jié)構(gòu)的平衡狀態(tài)及可能的不平衡力矩方向。
3.2 稱(chēng)重結(jié)果
3.2.127號(hào)墩轉(zhuǎn)體結(jié)構(gòu)不平衡稱(chēng)重試驗(yàn)
1)27號(hào)墩轉(zhuǎn)體結(jié)構(gòu)在臨時(shí)約束解除完畢后跨中側(cè)撐腳著地,屬于情況②的平衡狀態(tài),因此先進(jìn)行順橋向不平衡稱(chēng)重,其頂升力-位移曲線如圖5a所示。
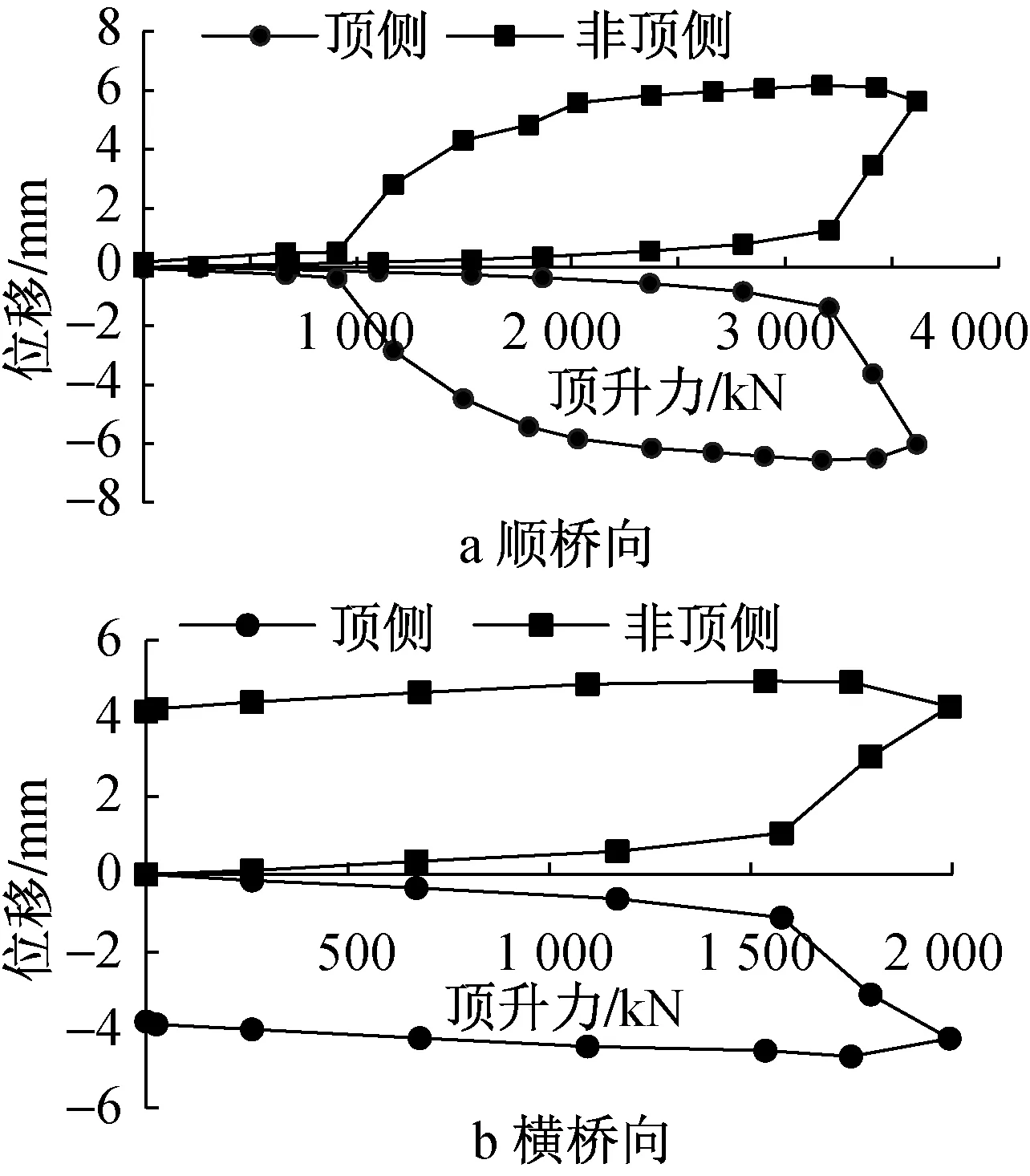
圖5 27號(hào)墩轉(zhuǎn)動(dòng)體稱(chēng)重頂升力-位移曲線
由圖5a可見(jiàn),P2S=3 205kN,P′2S=1 496kN。 轉(zhuǎn)動(dòng)體理論自重G為81 626kN,L2S=4.5m,根據(jù)式(4)、式(5)可得:MGS=10 577kN·m(跨中側(cè)),MZ=3 845kN·m。 由此得到轉(zhuǎn)體結(jié)構(gòu)縱向偏心距eS為13.0cm(跨中側(cè)),靜摩擦系數(shù)μ=0.006 9。
2)進(jìn)行橫橋向稱(chēng)重,由于橫橋向撐腳未落地,選擇一側(cè)起頂(根據(jù)臨時(shí)解鎖過(guò)程中觀察轉(zhuǎn)體結(jié)構(gòu)在曲線內(nèi)側(cè)有下沉位移,故選擇該側(cè)起頂),其頂升力-位移曲線如圖5b所示。
由圖5b可見(jiàn),球鉸豎向轉(zhuǎn)動(dòng)臨界力P1H= 1 576kN, 由式(3)可得橫向不平衡力矩MGH=3 247kN·m (曲線內(nèi)側(cè)),得到轉(zhuǎn)體結(jié)構(gòu)橫向偏心距eH為4.0cm(偏向曲線內(nèi)側(cè))。
由式(8)得到合偏心距e為13.6cm。
3.2.228號(hào)墩轉(zhuǎn)體結(jié)構(gòu)不平衡稱(chēng)重試驗(yàn)
1)28號(hào)墩轉(zhuǎn)體結(jié)構(gòu)在臨時(shí)約束解除完畢后,出現(xiàn)2個(gè)撐腳同時(shí)著地,分別為橫橋向曲線外側(cè)撐腳,及與跨中側(cè)之間的對(duì)角線位置撐腳,屬于情況③的平衡狀態(tài),可判斷偏心距橫橋向向曲線外側(cè)偏離,順橋向向跨中側(cè)偏離。故先進(jìn)行橫向稱(chēng)重試驗(yàn),曲線外側(cè)撐腳位置頂起,頂升力與位移曲線如圖6a所示。
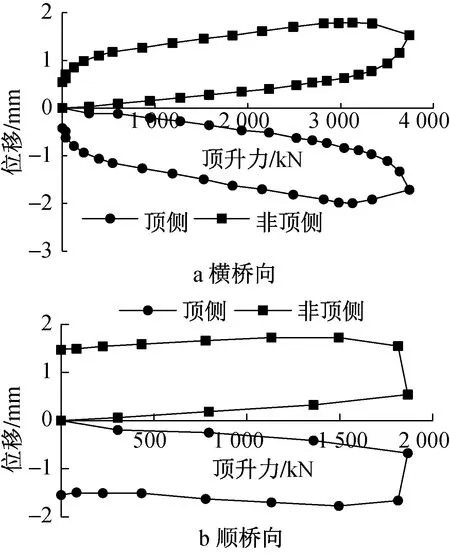
圖6 28號(hào)墩轉(zhuǎn)動(dòng)體稱(chēng)重頂升力-位移曲線
由圖6a可見(jiàn),P2H=3 504kN,P′2H=232kN。轉(zhuǎn)動(dòng)體理論自重G為156 013kN,由L2H=6m,式(4)、式(5)可得:MGH=11 207kN·m(曲線外側(cè)),MZ= 9 817kN·m。 轉(zhuǎn)體結(jié)構(gòu)橫向偏心距eH為7.2cm,靜摩擦系數(shù)μ=0.008。
2)進(jìn)行順橋向稱(chēng)重,根據(jù)撐腳情況可判斷轉(zhuǎn)體結(jié)構(gòu)偏向跨中側(cè),故在跨中側(cè)頂起,其頂升力-位移曲線如圖6b所示。
由圖6b可見(jiàn),球鉸豎向轉(zhuǎn)動(dòng)臨界力P1S=1 866kN, 求得縱向不平衡力矩MGS=1 379kN·m(跨中側(cè)),縱向偏心距eS為0.8cm(偏向跨中側(cè)),可見(jiàn)順橋向偏心距很小。計(jì)算得合偏心距e為7.2cm。
3.3 配重
3.3.1配重分析
本工程分別確立懸臂澆筑倒數(shù)第2節(jié)段區(qū)域和橋墩曲線外側(cè)(設(shè)置掛配重位置)3個(gè)位置作為配重區(qū)。顯然,懸臂端配重會(huì)產(chǎn)生橫橋向偏心距,而橋墩外側(cè)配重則不會(huì)影響順橋向偏心距。通過(guò)有限元分析,得到單側(cè)懸臂端配重區(qū)域施加配重時(shí),配重與順橋向、橫橋向偏心距關(guān)系如表1所示,橋墩外側(cè)配重對(duì)橫向偏心距的影響如表2所示。
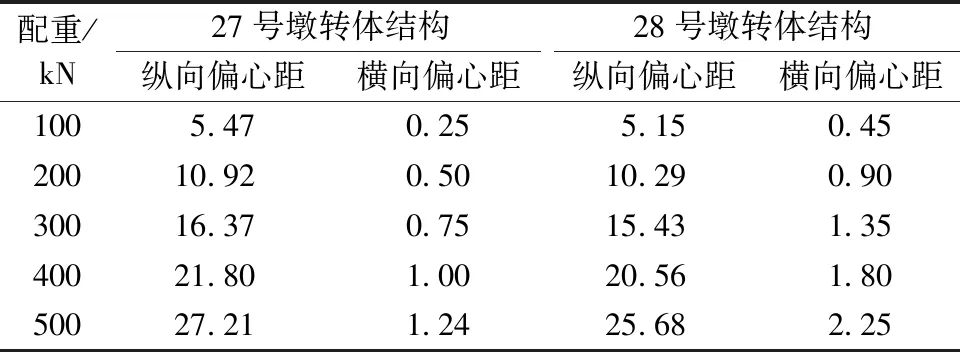
表1 單側(cè)施加配重對(duì)偏心距的影響
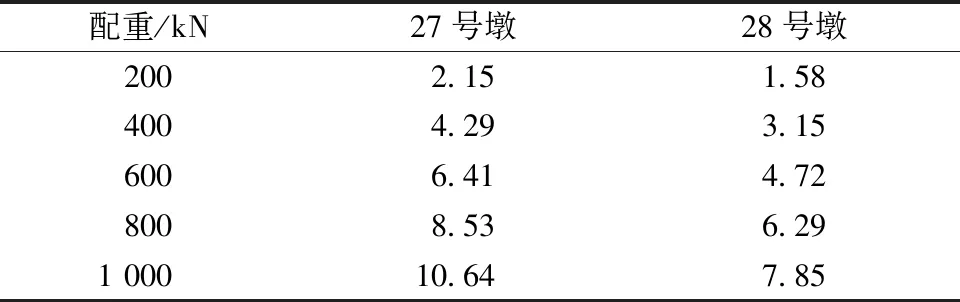
表2 墩外側(cè)配重對(duì)橫向偏心距的影響
根據(jù)配重分析,懸臂端區(qū)域配重對(duì)橫向偏心的影響不可忽略,而墩外側(cè)配重對(duì)橫向偏心的調(diào)節(jié)效果則不敏感。所以,曲線橋梁轉(zhuǎn)體結(jié)構(gòu)配重建議遵循“先順橋向后橫橋向”原則。此外,橫向配重還應(yīng)考慮轉(zhuǎn)動(dòng)體的橫向受力變形。
3.3.2配重
考慮到部分撐腳著地可使得轉(zhuǎn)體結(jié)構(gòu)在平轉(zhuǎn)時(shí)更加平穩(wěn),但撐腳支撐力過(guò)大也會(huì)過(guò)多增加平轉(zhuǎn)時(shí)的摩擦力矩,從而過(guò)多增加牽引力。所以,應(yīng)通過(guò)配重達(dá)到有撐腳著地,且支撐力較小是一種較佳的配重結(jié)果,也就是配重需控制配重后不平衡合力矩M′G略大于MZ。
對(duì)于27號(hào)墩轉(zhuǎn)體結(jié)構(gòu),根據(jù)稱(chēng)重結(jié)果,由MZ和轉(zhuǎn)動(dòng)體自重G(配重自重影響遠(yuǎn)小于G,可忽略)可得到:當(dāng)e>MZ/G=4.7cm時(shí),達(dá)到撐腳著地狀態(tài)。由于橫向偏心距eH為4.0cm(偏向曲線內(nèi)側(cè)),則確定通過(guò)配重使得縱向偏心距eS為3.0cm(跨中側(cè))時(shí),合偏心距為5.0cm,滿(mǎn)足要求。由此,根據(jù)表1結(jié)果內(nèi)插得到需邊跨側(cè)懸臂端配重185kN。同時(shí),該配重同樣會(huì)導(dǎo)致橫橋向向曲線內(nèi)側(cè)偏心增大0.45cm。所以配重后實(shí)際縱向偏心距eS為3.0cm(跨中側(cè)),橫向偏心距eH為4.5cm(偏向曲線內(nèi)側(cè)),合偏心距為5.4cm。實(shí)際施工中,按此方案配重后,對(duì)角線上撐腳著地,但支撐力較小,對(duì)牽引力影響小,且可保證平穩(wěn)轉(zhuǎn)體,是一種理想的轉(zhuǎn)體平衡狀態(tài)。
對(duì)于28號(hào)墩轉(zhuǎn)體結(jié)構(gòu),根據(jù)稱(chēng)重結(jié)果,由MZ和轉(zhuǎn)動(dòng)體自重G可得到:當(dāng)e>MZ/G=6.3cm時(shí),達(dá)到撐腳著地狀態(tài)。而根據(jù)稱(chēng)重結(jié)果,縱向偏心距eS為0.8cm(偏向跨中側(cè)),橫向偏心距eH為7.2cm(偏向曲線外側(cè)),合偏心距e為7.2cm,略大于控制值6.3cm,可見(jiàn)該狀態(tài)能較好地滿(mǎn)足撐腳著地且撐腳支撐力較小的控制標(biāo)準(zhǔn),故不再需配重。
為更好地控制轉(zhuǎn)體牽引力,可按配重后平衡狀態(tài)計(jì)算撐腳支撐力,通過(guò)支撐力引起的摩阻力矩計(jì)算轉(zhuǎn)體牽引力,本文限于篇幅不再贅述。
上述稱(chēng)重試驗(yàn)與配重方案有效保證了本工程轉(zhuǎn)體施工的平穩(wěn)順暢。
4 結(jié)語(yǔ)
1)轉(zhuǎn)體結(jié)構(gòu)臨時(shí)鎖定解除過(guò)程中應(yīng)觀測(cè)轉(zhuǎn)體結(jié)構(gòu)位移,初步判斷不平衡狀態(tài),為設(shè)計(jì)雙向不平衡稱(chēng)重試驗(yàn)方案提供依據(jù)。
2)由于球鉸的中心對(duì)稱(chēng)特點(diǎn),可假定轉(zhuǎn)體結(jié)構(gòu)任意方向剛體轉(zhuǎn)動(dòng)靜摩擦系數(shù)一致,可減少頂升次數(shù),提高稱(chēng)重試驗(yàn)效率。
3)配重對(duì)調(diào)節(jié)順橋向偏心敏感,而對(duì)橫橋向偏心不敏感,在配重方案設(shè)計(jì)時(shí),宜采用“先順后橫”配重策略,同時(shí)以合偏心距控制為目標(biāo),調(diào)節(jié)時(shí)以順橋向偏心距為主、橫橋向偏心距為輔,并充分考慮曲率影響下順橋向配重對(duì)橫橋向偏心的影響。
4)以配重后不平衡合力矩略大于摩阻力矩為合偏心距控制目標(biāo),既能使撐腳著地以提高轉(zhuǎn)體結(jié)構(gòu)穩(wěn)定性,又可控制撐腳較小的支撐力,從而控制轉(zhuǎn)動(dòng)牽引力,同時(shí)還能減少配重量。
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2019年4期)2019-04-22 03:28:24
中國(guó)公路(2017年11期)2017-07-31 17:56:30
中國(guó)公路(2017年10期)2017-07-21 14:02:37
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:04
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
