無人作戰飛機海域艦船目標偵察方法研究
2023-10-28 14:59:22李昭奕劉嘉駒劉念楊鵬輝
無人機 2023年6期
李昭奕 劉嘉駒 劉念 楊鵬輝
當前,各國在研及列裝的無人作戰飛機多采用預先規劃和臨機規劃相結合的任務規劃模式。無人機執行任務前,任務規劃員預先規劃飛行航線。無人機執行任務過程中,任務規劃員根據戰場環境信息實時調整飛行航線。當前世界各軍事強國聚力發展高自主性的無人作戰飛機,但受機器學習和人工智能等技術發展限制,目前高自主性的無人作戰飛機仍停留在概念機階段。基于當前無人機裝備實際運用的技術實際考慮,半自主模式的預先規劃與實時規劃相結合的方式,對提升無人作戰飛機的作戰能力具有重要現實價值。
無人作戰飛機海上廣域偵察
無人機搭載合成孔徑雷達在海上進行偵察,可以獲取到艦船的遙感圖像。無人機獲取海上遙感圖像的過程為:指揮控制中心發送艦船位置信息至地面指揮控制站,地面指揮控制站通過上行鏈路發送飛行控制信號至無人機紅外遙感圖像攝像平臺,無人機將獲取的圖像、視頻和GPS定位信息經下行鏈路傳送回地面指揮控制站,地面指揮控制站將圖像、視頻、GPS定位信息傳送給指揮控制中心,指揮控制中心的判讀人員對比艦船目標信息對遙感圖像進行判讀。無人機航拍得到的艦船遙感圖像清晰度高、比例尺度大、空間信息豐富,有利于艦船目標的識別。但小型海島等與艦船相似的目標會對識別工作造成干擾。
無人機遂行作戰任務時,要結合任務和目標特點,精心選擇載荷,靈活運用各種戰法。無人機通常配備多種載荷,針對不同的偵察目標,選擇合適的載荷,能獲取更高質量的目標圖像。面對不同的戰場環境,選擇合適的偵察方法,能夠更大程度提升偵察效果。因此,按照“精選載荷,活用戰法”的原則,需要熟悉各種載荷的戰技性能指標和功能特點,根據任務類型選擇最適合的載荷。例如,偵察監視某海域,則應選擇廣域偵察能力強的掛載設備。根據海上聯合作戰的作戰指導、無人機作戰能力、敵作戰部署和作戰目標,要針對性選取戰法,并根據敵情變化靈活變換戰法,爭取作戰主動權。
本文基于海上廣域偵察特征,提出了“圍棋”網格法,結合多源情報信息,劃設偵察區域邊界,推算目標可能出現的區域,突出偵察重點區域,提高了偵察搜索的時效性。采取棋格點位“盤旋”、棋盤“切點”跳圈偵察的方法,能夠避免因敵活動艦船目標相對較小,無人機大角度機動易丟失目標,無法實現持續穩定跟蹤監視,以及敵防空火力系統對我機構成威脅,確保了無人機的飛行安全。
預先規劃,構建“棋盤”網格偵察航線
“大視場”任務區域全掃描,最快速度發現“可疑點”
戰場偵搜范圍大是海上艦船偵察任務的主要特征。全范圍偵掃作戰海域,并在最短時限內完成,是首要任務目標。無人機偵察載荷的偵照范圍是重要限制條件。具體而言就是,在任務計劃所設定的飛行高度下,無人機任務載荷偵照目標,任務載荷監控員通過指揮控制站監視實時下傳顯示的視頻信息,任務載荷監控員能夠清晰發現疑似目標的“小黑點”。無人機執行“盤旋”指令進行偵察,無人機任務載荷的傾斜偵察角度決定了偵照圖像內容,無人機的盤旋半徑也是決定偵照圖像內容的關鍵影響因素。
先手布局,劃定“棋盤”方格最小間距
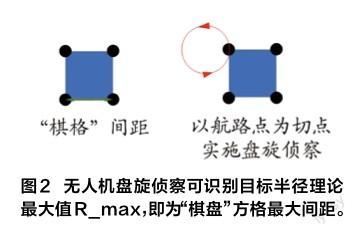
假設無人機處于“盤旋狀態”,飛行高度為H,無人機傾斜角度為θ,無人機任務載荷設定最小焦距時,處于最大視場狀態,此時在地面指揮控制站的監控畫面中,可以清晰看到“小黑點”。據此,可以推算出無人機在“盤旋”狀態下,發現目標的偵察半徑理論最大值Rmax,即Rmax=H tan θmax,如圖1所示。無人機執行作戰任務,飛行安全是首要因素。假設無人機的最小轉彎半徑為R,第一種情況,若無人機在盤旋狀態下,可發現目標的半徑理論最大值Rmax小于無人機最小轉彎半徑R,無法保證無人機的飛行安全。在此情況下,為保證無人機的飛行安全,無人機盤旋偵察識別目標半徑理論最大值Rmax,取值為無人機最小轉彎半徑R值,即令Rmax=R。第二種情況,若無人機在盤旋狀態下,可發現目標的半徑理論最大值Rmax大于或等于無人機最小轉彎半徑R,能夠保證無人機的飛行安全,則無人機盤旋偵察識別目標半徑理論最大值Rmax,取值理論計算值,即Rmax。本文劃設“棋盤”方格,“棋盤”方格最大間距,即為無人機盤旋偵察可識別目標半徑理論最大值Rmax,如圖2所示。
圈“地”圍域,劃設偵察范圍邊界
首先,根據敵我雙方攻守關系,結合海上探測預警雷達等多源情報信息綜合研判,預判敵方艦船航行方向及最大可能性出現區域,采取主動出擊、劃設重點區域的方式。情況一:若敵方艦船意圖抵進我方海域,并企圖登陸我海岸線,則根據敵方艦船可能抵進偵察的最大范圍,甚至敵方艦船抵進打擊我方陸基兵力或基礎設施的最遠距離,劃設為偵察范圍邊界。情況二:若我方艦船于近海或深藍遠海遂行海上任務,敵方艦船闖入我方雷達探測識別區,則根據我方艦船或編隊的最小安全距離,劃設為偵察范圍邊界。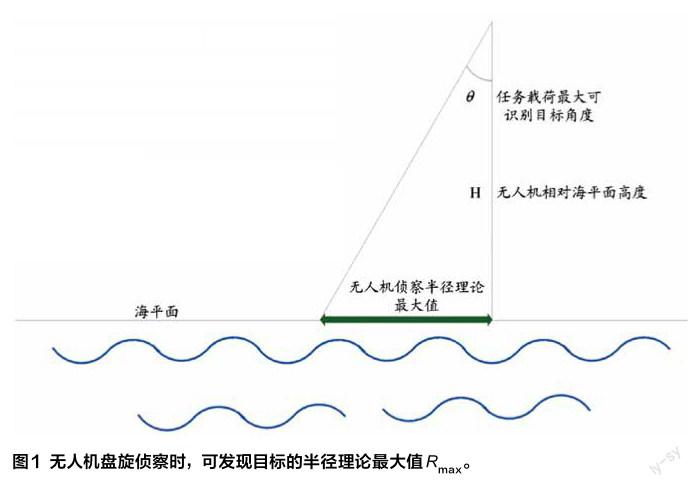
橫經縱緯,自內向外劃設“棋盤”
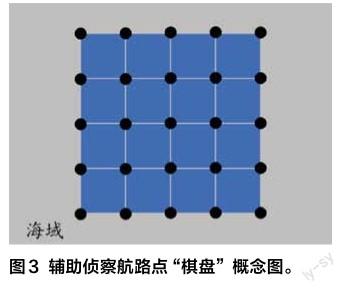
劃設偵察區域邊界,對海上偵察任務區域進行柵格化處理。影響因素為最小偵察區域邊界,以及無人機盤旋偵察可識別目標半徑理論最大值R_max。具體過程為:多源情報信息綜合研判結果為偵察區域中心位置點,自中心向邊界展開,建立同間距網格點。實際作戰運用中,依據戰場環境信息經驗,通常海上艦船目標出沒于距陸地較遠的海洋深處,一般周邊存在大型海島的可能性較小,但也在此提及,若艦船周邊明顯存在不必要劃設為偵察區域,則可不再拘泥于矩形“棋盤”設定,在此僅為理想化假設。具體實施作戰任務時,不可生搬硬套,應結合具體戰場態勢及地理環境信息做以取舍。本文總體思路為確保偵察區域全覆蓋,在無人機確定高度的前提下,保證任務載荷可有效清晰識別監控圖像中最小影像信息,圖3為輔助偵察航路點“棋盤”概念圖。
落“子”為棋,規劃全域偵察航線
在預先規劃中,可載入的任務規劃航路點數量受數據存儲限制。但基于前文思路,在確保偵察區域全覆蓋的情況下,根據多源信息劃設的網格,往往會過于密集,因而造成航路點數量過多。一方面,航路點可能由于數據存儲限制,無法全部加載。另一方面,無人機在航行過程中,飛行操控席的監控屏幕上的態勢點位過于密集,飛行操控員視覺上會產生額外負擔和干擾,影響飛行操控員有效監控無人機的飛行狀態,降低飛行的安全性。因此,建議采取四等分、八等分等切分方式,在任務航線中,僅輸入偵察區域關鍵點位信息,確保飛行航線絕對精簡,在無人機飛抵任務區域前,為飛行操控員提供態勢參考。
具體過程為:任務前,加載“精簡版”“棋盤”網格航線至任務航線,作以態勢輔助;任務執行過程中,當無人機抵進偵察區域邊界,加載“任務版”“棋盤”網格偵察航線,無人機抵進重點區域實施偵察,此時可結合多源情報信息,預判艦船航行方向,順向搜索偵察。
實時規劃,持續穩定跟蹤監視艦船目標
綜合多方情報信息,確定“火力威脅圈”
無人機抵進執行航空偵察任務,須首要保證無人機的飛行安全,進而確保無人機有效完成作戰任務目標。任務過程中,無人機從偵察區域邊界進入,沿預判艦船航行方向順向搜尋,當發現疑似目標時,或者臨近重點目標區域時,無人機需要立即調整飛行探測位置,及時切點“外跳”,確保無人機處于安全的偵察位置,隨后無人機任務載荷對目標進行偵照,地面情報人員綜合研判,判斷目標是否為艦船,判斷艦船所屬國別、類型等基本信息,判斷艦船上是否搭載防空武器、反無人機裝備等火力裝備,進而判斷敵方的火力打擊范圍。
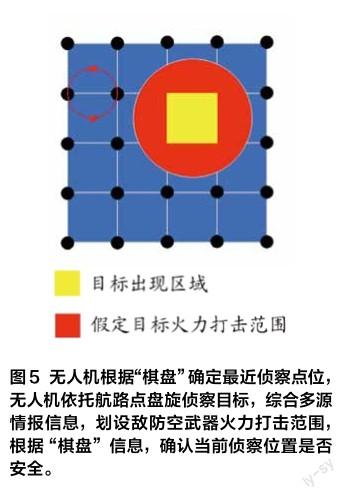
無人機根據“棋盤”信息,確定最近偵察點位,無人機依托航路點,盤旋偵察目標。綜合多源情報信息,劃設敵防空武器火力打擊范圍,根據“棋盤”信息,確認無人機當前偵察位置是否安全。飛行操控員操控無人機,快速做出反應動作,向“棋格”外圈機動,確保無人機飛行安全。
根據激光測距確定敵我位置距離,靈活機動確保安全
計算敵防空火力圈和無人機的相對距離,當無人機處于安全位置時,載荷監控員向艦船目標發射激光,測定無人機與艦船目標的直線距離,持續穩定跟蹤監視敵方艦船目標,動態監控敵我位置距離,判斷無人機當前是否存在安全威脅,適時采取機動“跳圈”方式應對。
切換“盤旋”點位,確保任務載荷平臺畫面穩定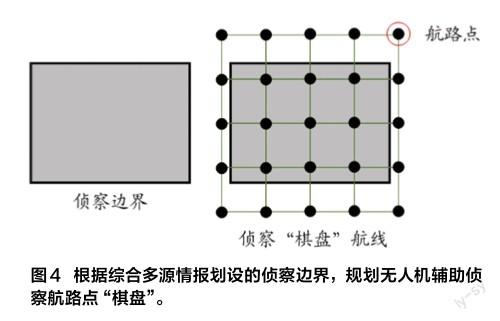
無人機飛行姿態無相對大角度機動,保證了無人機的飛行安全。同時保證了任務載荷平臺獲取到的實時監控畫面,能夠持續穩定鎖定目標,將目標圈定在視線范圍內。當前,無人機執行區域偵察任務,通常采取“直線往復偵察法”“光柵偵察法”以及“掃雪偵察法”。
基于上述三類偵察方法,采取壓縮直線偵察距離的方式,即“壓縮柵格高度”。根據柵格單向平移特征,相對目標距離會增大或減小,導致無人機逐漸遠離或抵進目標。一是無人機的飛行安全可能出現風險,二是會導致監視畫面中的目標圖像“忽大忽小”,造成監控不穩定,甚至導致目標丟失。
目前,無人機執行跟蹤監視任務,飛行操控手段通常采取“左盤旋”“右盤旋”“8字盤旋”等方式,無人機小角度盤旋,確保任務載荷平臺畫面相對穩定,目標圖像大小變化較小,且目標可始終圈定在監控畫面內。
棋盤“切點”偵察,確保持續穩定跟蹤監視
無人機根據與敵艦船相對距離、敵防空打擊范圍等關鍵信息,采取“盤旋”偵察方式,對敵方艦船持續穩定跟蹤監視,如圖6所示。若敵艦船目標與我機距離不斷增大,目標圖像逐漸縮小,結合當前所處“棋盤”網格位置,綜合分析周邊網格情況,敵防空火力打擊圈和最小偵察半徑等限制因素,遴選最佳切換航路點。
實施規劃平行敵艦船航行,臨機調整“棋盤”
持續穩定監控敵方艦船目標一段時間后,可實施臨機規劃,規劃平行于艦船航行方向的偵察航線,依據艦船當前概略位置劃定威脅區,無人機與敵方艦船目標始終保持安全距離,無人機發現敵方艦船目標后,使用激光測距測定目標位置信息,對敵方艦船目標持續跟蹤。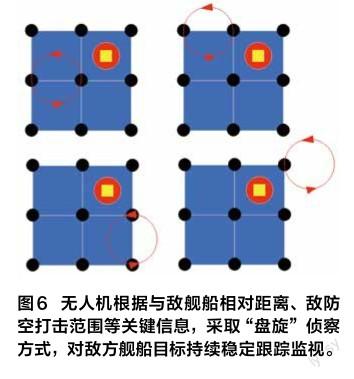
結束語
當前,海上廣域偵察任務面臨兩大現實難題,一是海上任務區域廣闊,正所謂“滄海一粟”,即便無人機偵察載荷平臺切換至“大視場”模式,想要在茫茫大海上尋找相對微小的艦船目標,也需要大量的時間。通過“圍棋”網格法,結合多源情報信息,劃設偵察區域邊界,預判中心區域,計算最大棋格間距,突出偵察重點,根據線索,有序搜尋,提高了偵察搜索的時效性。二是無人機高空狀態下,敵方艦船目標相對較小,無人機大角度機動,采取“柵格法”偵察,易丟失目標,無法持續穩定跟蹤監視目標,以及敵方艦船搭載防空火力系統,對我機構成安全威脅。采取依托棋格點位“盤旋”,棋盤“切點”跳圈偵察,確保安全,穩定追蹤,有效監視。本文針對海上廣域艦船目標偵察任務背景,提出的構建“棋盤”、切點偵察方法,對無人作戰飛機海域作戰運用具有重要實戰意義,可為從事本專業人員提供參考思路。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
中國工程咨詢(2016年4期)2016-02-14 07:28:28