基于HJI理論的移動機器人神經網絡自適應控制
2023-10-29 01:48:54陳昌忠孫增誠
計算機仿真 2023年9期
劉 鑫,陳昌忠,羅 淇,孫增誠
(四川輕化工大學自動化與信息工程學院,四川 自貢 643000)
1 引言
移動機器人具有靈活性高,生產效率高,實用性強等優點,已廣泛應用于工業領域和社會場所。但是,由于其具有強耦合、摩擦負載不確定等非線性特點,對于它的控制研究一直受到國內外學者的關注。文獻[1,2]采用智能PID控制算法對一般PID控制算法的參數不易整定,魯棒性差等問題進行了優化。文獻[3]設計出一種新型滑模控制算法,解決了移動機器人在極坐標系中的跟蹤控制問題。文獻[4]針對參數不確定的運動學模型,利用反演設計了自適應控制器,并將其推廣到了動力學模型中。隨著控制理論的發展,神經網絡技術也廣泛應用于移動機器人的控制之中。文獻[5]利用神經網絡在線調整運動學控制器參數和補償動力學PID控制器。文獻[6]設計了一種自適應神經滑模控制器,實現了不確定動力學模型的移動機器人的軌跡跟蹤控制。文獻[7]利用神經網絡對打滑條件下的動力學模型進行補償,實現了打滑條件下移動機器人的軌跡跟蹤。
文獻[1-3]雖然具有良好的運動學跟蹤效果但是并未考慮移動機器人的動力學模型。文獻[4]雖然考慮了動力學模型,但是并未考慮模型不確定性和外部擾動,在實際的控制中可能出現較大的誤差。
本文充分考慮移動機器人運動學模型和動力學模型的不確定建模項及不確定外部干擾等問題,設計了基于反步法的運動學控制器,利用RBF神經網絡對動力學模型不確定項和外界干擾進行補償,結合HJI理論設計了動力學控制器。利用MATLAB對本文所設計的控制方法進行數值仿真,仿真結果表明了本文設計的控制系統具有良好的魯棒性。
2 HJI理論
在模有界條件下,非線性不確定奇異系統的魯棒可鎮定性與一個擴展的HJI微分不等式存在正解等價[8]。本文基于HJI不等式設計動力學反饋控制器,并利用HJI理論來驗證移動機器人動力學系統的穩定性。
(1)

為了評判系統的魯棒性,定義如下性能指標
(2)
式(2)中,J為系統的L2增益,它的大小可用來反應系統魯棒性能的好壞。J越小,系統的魯棒性能越好。
根據文獻[10],HJI理論可描述為:對任意給定一個正數γ,如果存在一個正定且可微的函數L(x)≥0,并且滿足
則J≤γ。
3 移動機器人的運動學與動力學模型
考慮一類受非完整約束的差速驅動的移動機器人,其后方兩側為驅動輪,前方兩側為自由輪,自由輪僅起支撐作用,如圖1所示。設兩驅動輪的半徑都為r,軸距為2b,點N為兩輪的軸心。向量q=[xc,yc,θc]T表示移動機器人的軸心N在笛卡爾坐標系中的位置,θc表示移動機器人的運動方向與笛卡爾坐標系橫軸正方向的夾角。

圖1 移動機器人示意圖
對于圖1所示的移動機器人,滿足純滾動、無滑動情況下的非完整約束條件為

(3)
將(3)式改寫成如下形式,即
(4)
其中

(5)

(6)
選擇一個滿秩矩陣S(q)為AT(q)零空間的一組基,即
ST(q)A(q)=0
(7)
存在一個輔助速度控制向量V(t),使

(8)
其中

(9)
V(t)=[vω]T
(10)
v和ω分別表示移動機器人的線速度和角速度。
則非完整移動機器人的運動學方程表示為

(11)
一般情況下,非完整移動機器人的動力學方程可以表示為[11]

(12)

由Euler—Lagrange方程可知,移動機器人動力學模型的參數[6]

(13)
式(13)中,m表示移動機器人的質量,I表示轉動慣量,τr表示其右輪力矩,τl表示其左輪力矩。

(14)
將式(14)等式左右兩邊分別左乘ST(q),將式(8)代入整理后得移動機器人一階動力學模型

(15)
其中
由文獻[12]可知式(15)具有以下性質


結合式(7)、式(11)和式(14)可得

(16)
4 控制器設計
為了實現移動機器人位置跟蹤,本文針對移動機器人運動學模型和動力學模型分別設計相應的控制器,具體如下:
1) 針對移動機器人的運動學模型采用反步法設計輔助速度控制率。
2)針對移動機器人的動力學模型,基于HJI理論設計具有RBF神經網絡補償模型不確定項和外部干擾的動力學控制器。
4.1 運動學控制器設計

(17)
對位置跟蹤誤差求導,可得誤差變化率

(18)
在給定參考線速度vr≥0,角速度ωr≥0的基礎上采用反步法設計運動學控制器[13]

(19)
其中,k1,k2,k3為大于0的可調節參數。
4.2 動力學控制器設計
RBF神經網絡能在一個緊湊集和任意精度下逼近任何非線性函數[14]。本文利用RBF神經網絡對移動機器人的動力學模型存在不確定建模項和不確定外部擾動進行逼近。
設

(20)

f=W*σ+εf
(21)
由于存在逼近誤差,利用自適應算法調節神經網絡的權值,則神經網絡的估計輸出如下
=σ
(22)
定義速度跟蹤誤差為
ec=V-Vc
(23)
(24)
設計如下自適應率
=-ηecσT
(25)
其中,η為大于0的可調節參數。
結合式(15),式(20)和式(21)可得RBF神經網絡逼近下的動力學模型為

(26)
根據該模型,設計前饋控制率為

(27)
其中,u為反饋控制率。
將式(27)代入式(26)整理后得

(28)
將速度跟蹤誤差ec作為評判指標z,則
z=ec
(29)
式(28)可改寫成

(30)
式(30)中,設
h(ec)=ec
則式(30)可該寫成式(1)的形式。
為了保證動力學系統誤差收斂,根據HJI理論設計反饋控制率為
(31)
5 系統穩定性分析
定義運動學系統和動力學系統的Lyapunov函數分別為L1和L2
(32)

(33)


對式(32)求導可得

(34)
結合式(17),(18),(19)可得

(35)

對式(33)求導可得

(36)
結合式(28),式(36)可以改寫為

(37)

(38)
將反饋控制率式(31)代入式(38)中,可得

(39)
定義

(40)
將式(39)代入上式,整理可得

(41)
由于
可知H≤0,則

(42)

根據以上分析驗證,設計移動機器人的控制系統結構如圖2所示。
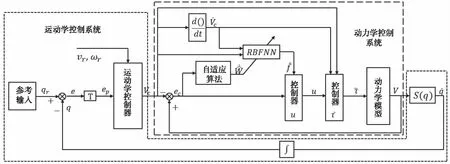
圖2 基于HJI理論的輪式移動機器人的神經網絡控制
6 仿真結果及分析
圖3為移動機器人圓軌跡跟蹤仿真曲線,圖4為圓軌跡跟蹤下移動機器人的位置跟蹤誤差。由圖3和圖4可以看出,移動機器人能夠快速,平穩,且準確的跟蹤上參考軌跡。且位置跟蹤誤差快速收斂到0,幾乎無抖動,表明控制系統具有良好的魯棒性。

圖3 軌跡跟蹤曲線

圖4 位置跟蹤誤差曲線
圖5為動力學控制器對輔助速度控制輸入的跟蹤曲線。由圖可知,速度控制輸入平穩無跳動,且實際速度能夠很快且準確的跟蹤上輔助速度控制輸入,說明本文所設計的動力學控制器具有良好的跟蹤性能。

圖5 輔助速度跟蹤曲線
圖6為移動機器人左右輪的控制力矩輸入曲線。由圖可知,左右輪的控制力矩呈正余弦波動,這是由于力矩控制器中存在RBF神經網絡的補償控制,而RBF神經網絡是對不確定項的逼近,這樣力矩控制器恰好能抵消不確定項,提高系統的魯棒性。

圖6 驅動力矩輸出曲線
圖7為RBF神經網絡對不確定建模項和不確定外界干擾的逼近曲線。由圖可知,所設計的RBF神經網絡能夠快速且準確的逼近不確定項。

圖7 不確定項逼近曲線
7 結論
本文以動力學模型具有不確定建模項和不確定外界擾動的非完整輪式移動機器人為研究對象,分析了其運動學和動力學模型,介紹了HJI理論,并在此基礎上設計具有RBF神經網絡補償的移動機器人控制方法。通過MATLAB軟件對移動機器人進行軌跡跟蹤仿真,仿真結果表明,RBF神經網絡能夠快速準確地逼近不確定項,移動機器人能夠快速,平穩,準確的跟蹤參考軌跡。在有較大不確定建模項及外界干擾等因素的影響下,該控制方法下移動機器人依然具有良好的跟蹤效果,且相對于文獻[5,6],控制器需要調節的參數少。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
制造技術與機床(2017年3期)2017-06-23 08:11:21
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
