基于BLUE的雷達/紅外異步融合算法研究
2023-10-31 09:49:44汪海兵
雷達科學與技術 2023年5期
盛 琥,汪海兵
(1.中國電子科技集團公司第三十八研究所,安徽合肥 230088;2.國防科技大學電子對抗學院,安徽合肥 230037)
0 引言
多傳感器數據融合是當前研究的熱點。以常見的雷達/紅外數據融合為例,雷達探測距離遠,單次觀測就能定位目標,且具備全天候工作能力,但容易被反輻射武器打擊;紅外傳感器不輻射信號,抗毀性強,測角精度高,但探測范圍小,且無法測距,需要在其他傳感器引導下發現目標。兩種傳感器組網,在中心統一調度下,對目標協同探測,信息融合,可實現優勢互補、協同增效。由于兩種傳感器的觀測模型不同,探測時間不同步,紅外傳感器數據更新率遠高于雷達,因此該組網系統面臨兩個問題:一是如何基于不同傳感器觀測,估計目標狀態,即非線性濾波問題;二是如何保證跟蹤精度和實時性。
傳統非線性方法包括擴展Kalman 濾波(Extended Kalman Filter,EKF)、粒子濾波[1](Particle Filter,PF)、容積Kalman 濾波[2](Cubature Kalman Filter,CKF)或無跡Kalman 濾波(Unscented Kalman Filter,UKF)、轉換量測Kalman 濾波[3](Converted Measurement Kalman Filter,CMKF)等。上述方法中,EKF 計算量最小,但魯棒性差;PF、UKF、CKF精度高,但計算量大,實用性差。CMKF 實現簡單,且兼顧精度和計算量,因此應用較廣。CMKF 中最具代表性的濾波方法是BLUE(Best Linear Unbiased Estimation),相比EKF,它的魯棒性好;相比采樣類濾波方法(CKF、UKF、PF),它的計算量小,因此在實用中受到重視,相關研究較多。其應用從常規目標跟蹤,拓展到多普勒目標跟蹤、只測角目標跟蹤、機動目標跟蹤等方面,在諸多場景得到應用[4-9]。基于以上分析,在雷達/紅外組網系統中,應用基于BLUE的異步融合算法跟蹤目標。
1 基于BLUE的雷達/紅外組網系統
BLUE 濾波是CMKF 中的代表性算法。CMKF將非線性觀測轉換為直角坐標系內的偽線性表達,推導轉換量測統計特性后,在Kalman 濾波架構下完成狀態估計。目前已有嵌套CMKF、基于量測的CMKF、去相關CMKF 和BLUE 等多種算法,在多普勒目標跟蹤、相控陣雷達目標跟蹤中得到驗證。BLUE 濾波相比其他方法,精度高、計算量小,沒有Kalman濾波的諸多限制,因此受到關注。


雷達/紅外組網系統以指控中心位置為參考原點,估計目標狀態;中心和傳感器位置不同,各傳感器的錄取時刻和觀測維度也不同,因此雷達和紅外傳感器需要采用不同的BLUE 濾波器,異步融合跟蹤目標,具體步驟如下:
1)基于多幀雷達觀測和目標運動特性,建立多個暫時航跡(可能的目標航跡)。
2)定期檢查暫時航跡,判斷其是否滿足起始條件,滿足條件轉到步驟3,將暫時航跡轉為穩定航跡,否則繼續維護暫時航跡。
3)基于暫時航跡的歷史觀測,粗略估計目標初始狀態,建立航跡。
4)如果雷達錄取的點跡與航跡關聯,采用改進BLUE 濾波器,更新該航跡;如果紅外傳感器錄取的點跡與航跡關聯,采用修正BLUE 濾波器,更新該航跡。
5)定期檢查航跡,如果航跡連續多幀錄取不到點跡,判斷目標消失,刪除該航跡。
2 改進BLUE濾波算法
雷達觀測為斜距rm,1和方位θm,1,觀測與真值的關系為
當斜距和方位誤差的乘積變大時,基于該模型的BLUE 濾波器性能變差。原因如下:將式(5)展開
方位估計θf,1是方位觀測θm,1和方位預測θp,1的加權和,表達式如下:
目標真實狀態未知,因此方位預測的方差近似為

約束1:在垂直雷達視線方向(切向),方位觀測誤差要遠大于方位預測誤差;
約束2:在沿著雷達視線方向(徑向),觀測項誤差要遠大于預測項誤差。

約束2的理由是:公式(8)中,雷達徑向誤差由觀測項誤差(與觀測相關)和預測項誤差(與預測相關)組成。BLUE 濾波器相關參數沒有閉式解(是用位置預測近似得到),通過αk,1調節觀測項誤差在徑向誤差的比重,避免徑向濾波發散。
約束1的數學表達式為
約束2的數學表達式推導如下:

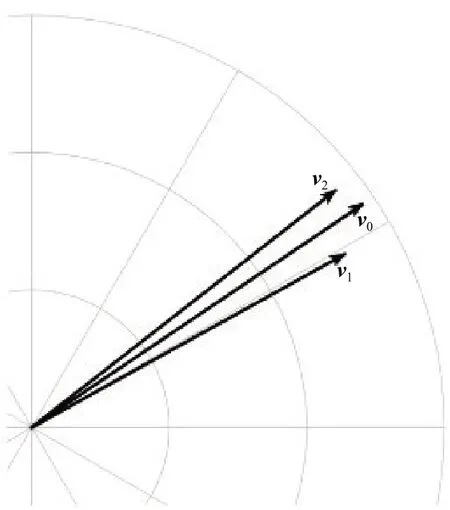
圖1 觀測向量、預測向量和真值向量示意圖
近似時,假設方位預測誤差遠小于方位估計誤差。?的方差為

綜合公式(12)和(17)兩重約束,求解出公式(9)中αk,1表達式為
其中,


3 修正BLUE濾波算法
紅外傳感器觀測θm,2與真值的關系為

得到rp,2后,構建k時刻轉換量測zk,2,下標2 表示紅外傳感器的轉換量測。
其中,

類似改進BLUE 濾波器,通過在紅外傳感器徑向和切向上分別加以約束,可以求解加權系數αk,2。
約束1的數學表達式為
約束2的數學表達式為
αk,2的表達式如下:
其中,


I是2階單位陣,Λk,2定義如下:
其中,
基于以上濾波參數,對目標遞歸濾波,實現純方位的BLUE跟蹤。
4 仿真分析
下面仿真驗證所提方法性能,場景1仿真參數如下:場景包括兩部性能相同的雷達、一部紅外傳感器。雷達斜距誤差σr,1=50 m,方位誤差σθ,1=4°,兩部雷達位于X軸上,相對Y軸對稱放置,間距10 km。紅外傳感器位于坐標原點,方位誤差為σθ,2=2°。目標從正北方向100 km 處向南飛行,速度(0,-50)m/s。飛行過程中,各軸的位置噪聲獨立無關,標準差0.1 m;速度噪聲獨立無關,標準差0.1 m/s。為模擬實際情況,傳感器的觀測時間不同步,而是等間隔交替探測目標,時間間隔T=1 s。蒙特卡洛仿真100 次,仿真時長200 s。將本文所提方法與經典BLUE 融合方法對比,二者區別是:當雷達探測到目標時,本文融合方法采用改進BLUE 濾波,經典融合方法使用文獻[6]的BLUE 濾波;當紅外傳感器探測到目標時,本文融合方法采用修正BLUE 濾波,經典融合方法采用文獻[17]的只測角BLUE 方法。兩種融合方法都采取兩點估計法來初始化目標狀態,修正BLUE 和改進BLUE的放大倍數都設置為κ=6。對比的性能參數包括位置估計精度(RMSE)和歸一化估計誤差均方(ANEES),前者表征濾波精度,后者衡量濾波誤差和實際誤差的匹配程度,ANEES 為1 時,濾波一致性最好,估計置信度最高。仿真結果如圖2所示。
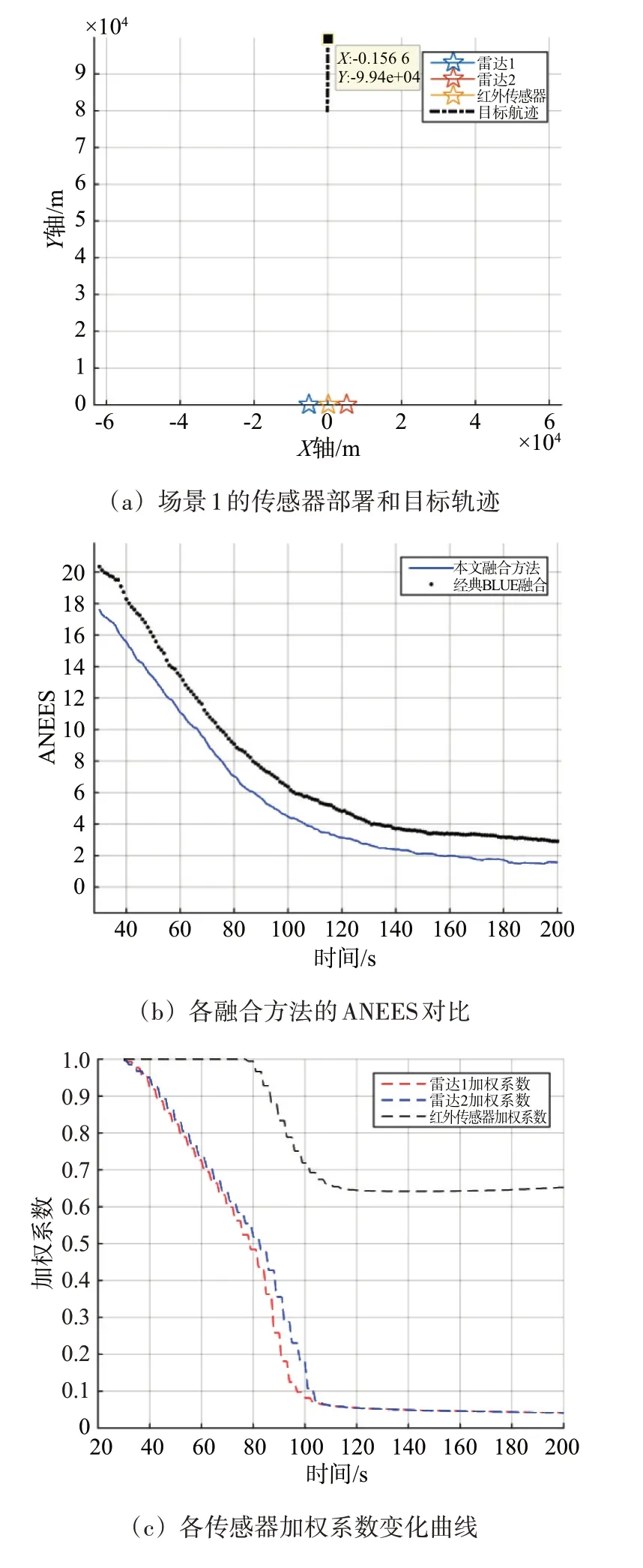
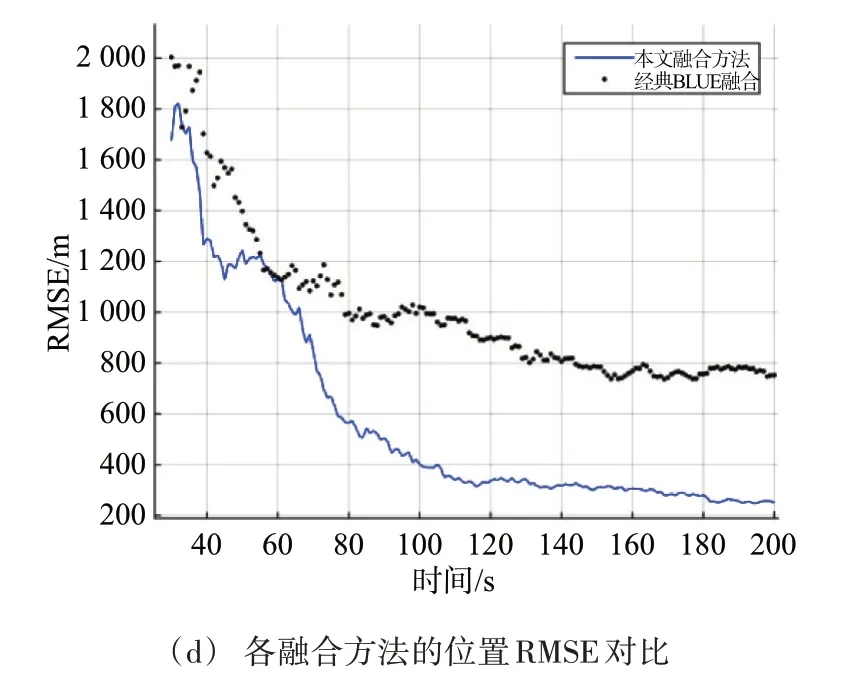
圖2 場景1的跟蹤性能對比
兩種方法的初始跟蹤性能接近,在跟蹤穩定后(30 s 后),所提融合方法的ANEES 比經典BLUE融合更逼近1,也即濾波置信度更好,如圖2(b)所示。由圖2(c)可見,30 s 后,雷達加權系數小于1;80 s后,紅外加權系數小于1,此時方位估計誤差小于方位觀測誤差,所提融合方法的精度明顯優于經典BLUE 融合,紅外傳感器的加權系數最終穩定在0.65,雷達加權系數穩定在0.05。所提方法位置融合精度(300 m)比經典BLUE 方法(800 m)提高2倍多,如圖2(d)所示。
為評估所提方法在不同布局下的性能,場景2中,其他條件不變,將兩部雷達間距由10 km 擴大到60 km。仿真結果如圖3所示。
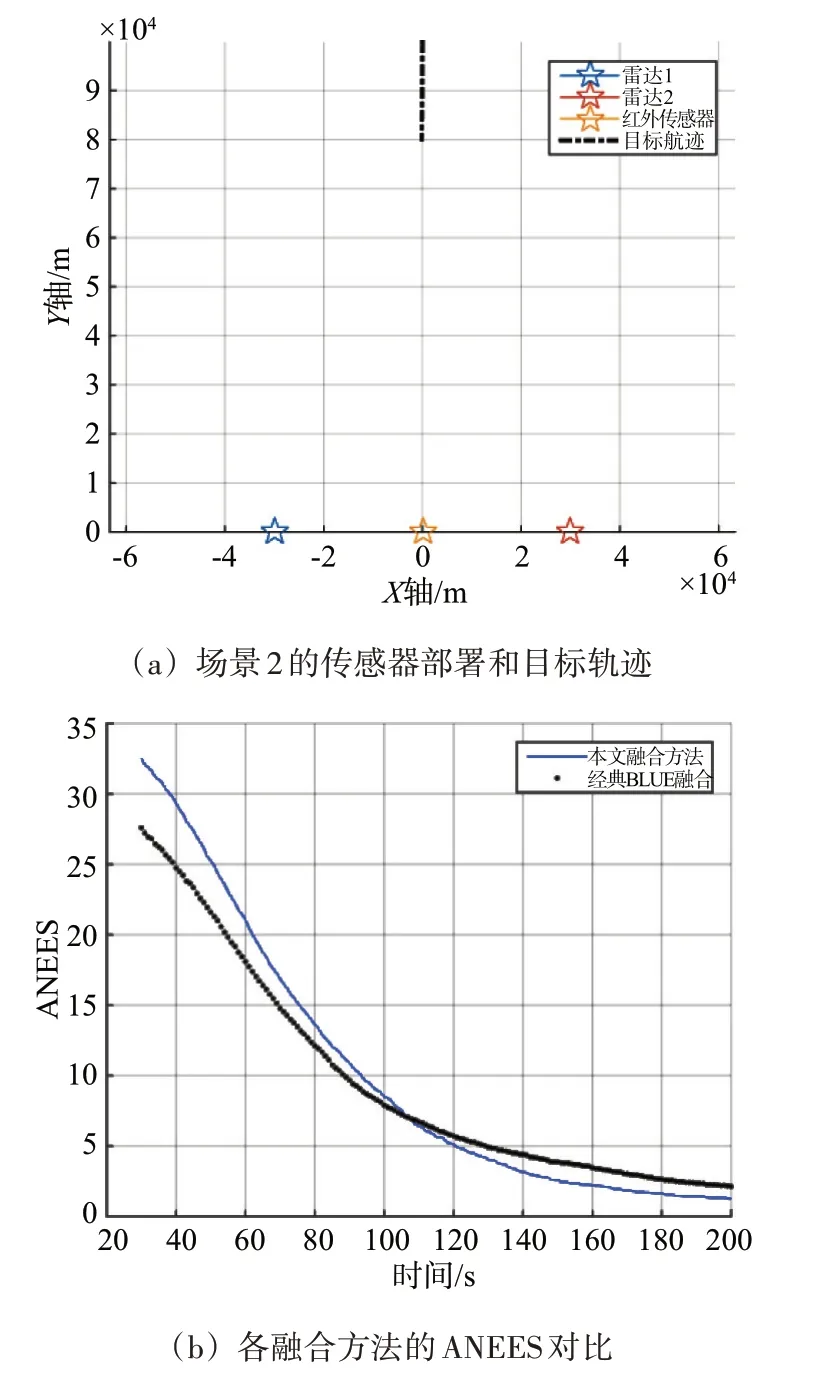
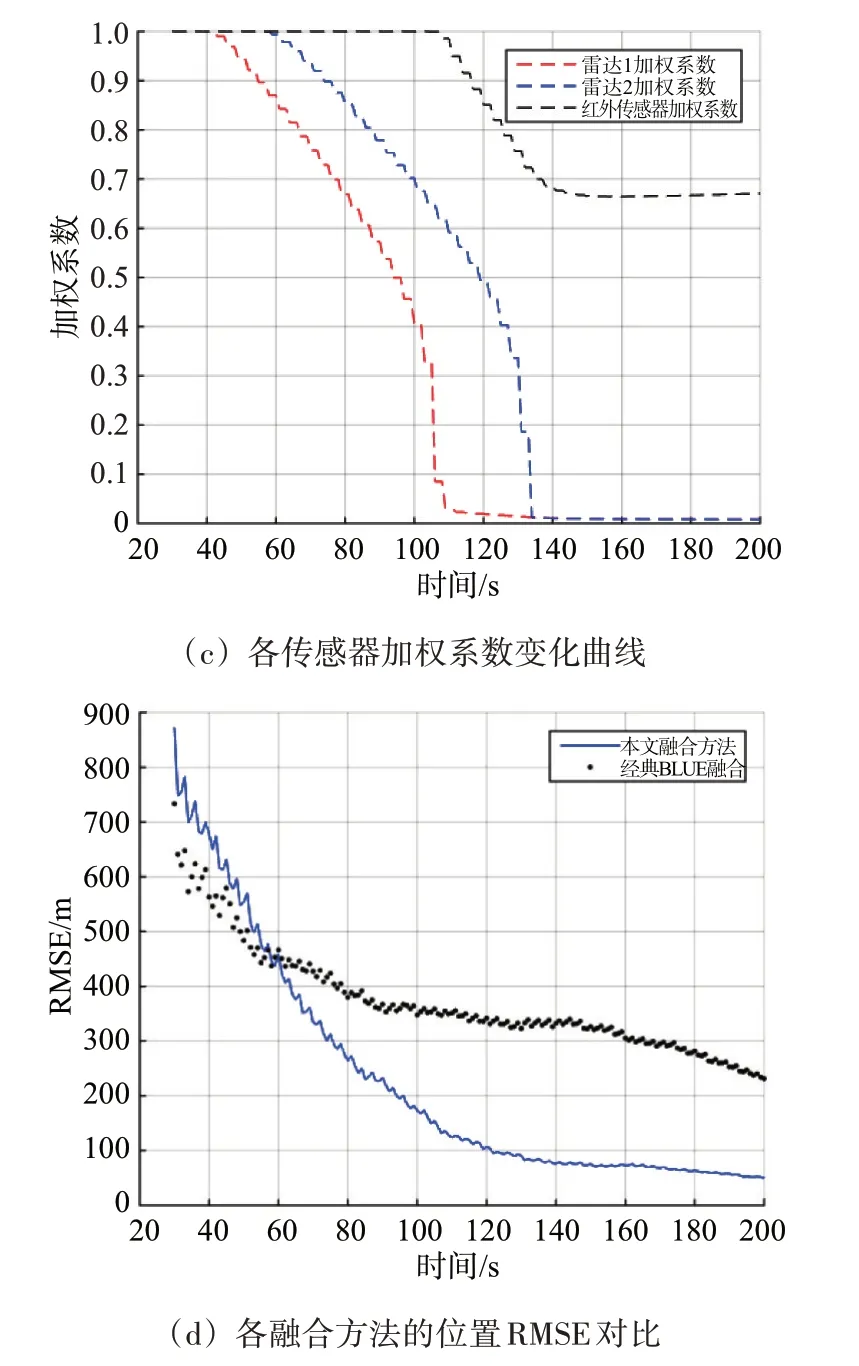
圖3 場景2的跟蹤性能對比
跟蹤穩定后,兩種方法的ANEES 變化情況類似,如圖3(b)所示。在圖3(c)中,紅外傳感器的加權系數約為0.65,雷達加權系數逼近0。幾何布局的改善和方位估計精度的提高,使得所提方法的融合精度(50 m)比經典BLUE 方法(250 m)提高5倍,如圖3(d)所示。
融合方法在兩種仿真場景中的運行時間如表1所示。

表1 各融合方法迭代運行時間對比(100次)
由表1結果可見,所提方法計算量略大于經典BLUE 方法,主要時間消耗在估計各傳感器的加權系數上,相對于融合精度數量級的提升,這點時間開銷可以承受。綜上可見,基于BLUE的異步融合跟蹤方法,可以用于雷達/紅外傳感器組網系統,在精度、置信度和計算量上具有優勢,有較高的應用價值。
5 結束語
針對雷達/紅外傳感器組網,異步融合跟蹤目標的問題,提出一種基于BLUE 的融合跟蹤方法。在雷達跟蹤目標時,采用改進的轉換量測模型,提高估計精度;在紅外傳感器跟蹤目標時,采用修正的轉換量測模型,實現純方位目標跟蹤。理論分析和仿真實驗證明:所提融合方法將估計精度提高2~5倍,實時性和魯棒性都有所保證。其設計思想對其他多源信息融合的應用具有借鑒意義。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
