一種車載毫米波TDM-MIMO雷達高精度成像方法
2023-10-31 09:49:48磨良升晉良念
雷達科學與技術 2023年5期
關鍵詞:方法
磨良升,晉良念,2
(1.桂林電子科技大學信息與通信學院,廣西桂林 541004;2.廣西無線寬帶通信與信號處理重點實驗室,廣西桂林 541004)
0 引言
車載毫米波雷達具有探測距離遠、測速精度高以及可實現穿透檢測等特點。與激光雷達、攝像頭等車載傳感器相比,其在光線環境較差和風沙雨雪惡劣天氣下表現出更可靠的感知水平,是車載輔助系統重要的傳感器之一。現有的雷達體制有合成孔徑雷達(SAR)、多發多收(MIMO)雷達以及多發多收-合成孔徑雷達(MIMO-SAR)[1-3]。SAR 利用合成孔徑原理,可以實現高分辨的微波成像。MIMO 雷達利用多發多收的波形分集特性聯合處理多通道回波數據,可以虛擬出更大的虛擬孔徑,從而實現高分辨測角[4-7]。MIMO 雷達與SAR 相結合,從而形成MIMO-SAR。本文使用MIMO 雷達通過時分復用(TDM)的方式發射和接收信號,然后進行一系列信號處理,得到目標的距離、速度和角度三維點云像。為了獲得三維點云像,需要進行距離像估計、多普勒像估計和角度像估計。距離像和多普勒像的估計一般使用傳統的快速傅里葉變換(FFT)方法,角度像的估計需要使用高分辨的測角方法才能區分角度相近的目標。因此,為了得到目標的高分辨成像,就需要結合高分辨的測角方法。
文獻[8]提出一種結合漸近最小方差稀疏迭代的高分辨點云成像方法。該方法根據AMV 準則,利用采樣數據協方差矩陣與真實協方差矩陣的差異,對網格功率進行多次迭代,從而提高角度分辨率[8]。然而,該方法需要迭代次數較高,計算量大,并且需要大量的數據快照,在數據快照較少的時候角度分辨性能急劇下降,不適合于車載場景。文獻[9]使用基于加權協方差擬合準則的稀疏迭代協方差估計方法進行角度估計。該方法能夠提供較高的角度分辨率和低旁瓣電平,但是其功率譜估計值與真實值之間存在一定的偏差,在得到功率譜估計初值之后還需要進一步進行迭代矯正,計算量大。文獻[10]提出一種迭代自適應方法(IAA)用于MIMO 雷達成像。由于沒有迭代更新噪聲功率,因此角度分辨率有限。文獻[11]提出一種基于奇異值分解的正則化IAA 方法(RIAA)來提高機載前視雷達成像分辨率。RIAA 通過去除小奇異值提高了噪聲抑制性能,與傳統的IAA相比,該方法角度分辨率有所提高。文獻[12]利用GS因子分解計算IAA的數據協方差矩陣和其逆矩陣,提出了一種快速迭代自適應方法(FIAA)應用于車載平臺。然而,該方法僅從降低計算量的角度考慮,角度分辨率依然有限。文獻[13]使用迭代最小化稀疏學習(SLIM)方法用于MIMO 雷達成像。SLIM 在迭代過程中不斷更新噪聲估計值和信號功率估計值,因此具有良好的角度分辨率。SLIM 的迭代次數較少,一般不超過10 次就達到收斂條件,計算量適中。
上述高分辨測角方法都是基于網格劃分來估計角度方向,角度估計結果只在劃分好的網格點上。然而,在車載場景中,目標點不一定出現在劃分好的網格點上,當目標點出現在網格點之外的角度時,估計的角度值與實際角度方向存在誤差,這種誤差稱為離網誤差,離網誤差會導致估計精度下降。當前方目標距離較近的時候,精度下降不會對定位產生較大影響;但隨著目標距離的加大,精度下降產生的定位不準確問題對后續的聚類、跟蹤等信號處理帶來巨大影響,因此必須解決離網誤差問題。為了獲得更加精準的目標來波方向,往往是通過將網格間距化分得更小來實現。然而過于密集的網格劃分不僅會增強傳感器陣列之間的相干性從而不滿足有限等距性質條件,而且將大大增加方法的運算量[14]。為了獲得更加精準的目標來波方向,同時避免密集網格劃分帶來的陣列相干性和運算量大的問題,本文利用ML 準則的統計特性,提出了一種SLIM 和ML 估計相結合的高精度測角方法用于點云成像。首先使用SLIM 方法對多個虛擬接收陣元的數據進行角度估計,然后最小化ML 成本函數來細化方向網格,經過較少次數的循環迭代,解決了離網誤差問題,從而獲得高分辨、高精度的測角結果。通過將本文提出的高精度測角方法用于角度像的估計,能夠獲得高精度的點云像,角度精度能夠達到0.1°。
1 信號模型
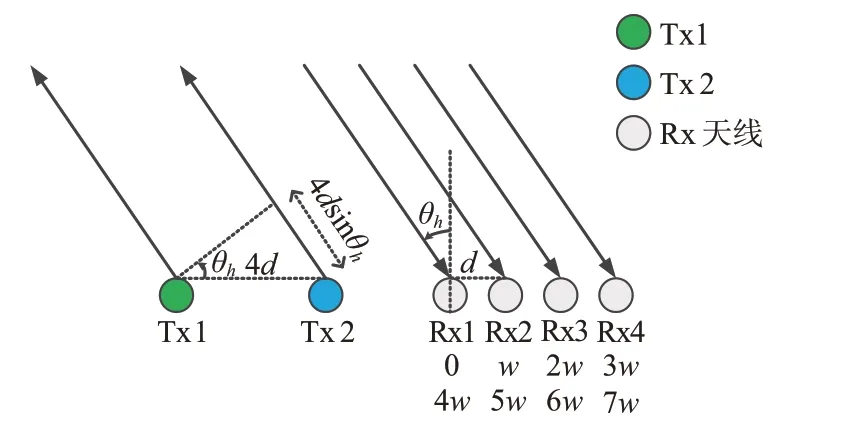
圖1 MIMO雷達陣元分布
兩個發射天線的間距是4d,以第一個Rx1 為參考,則各個接收陣元會出現[0w2w3w]的相位延時,Tx2發射的信號相較Tx1要多經過4dsinθh的路程,因此各個接收陣元會出現[4w5w6w7w]的相位延時。通過TDM 發射方式,共構成8 個等效虛擬陣元,虛擬陣元如圖2所示。
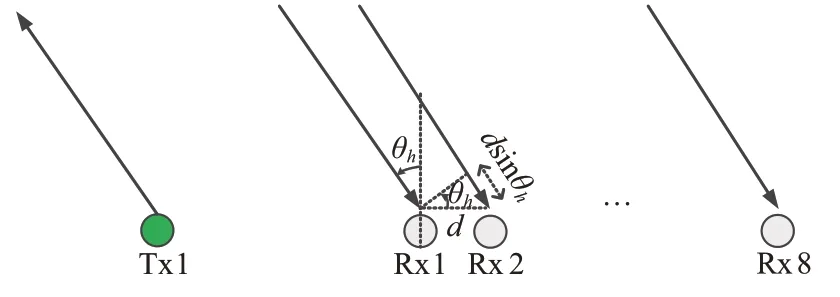
圖2 等效虛擬陣元分布
假設t時刻第i個發射陣元的發射信號為

假設雷達照射區域內存在H個目標,則第j個接收陣元接收第i個發射陣元所發射信號到目標并返回的回波信號表達式為
式中,c代表光速,vh代表速度,rh代表距離。將回波信號與發射信號進行混頻并經過低通濾波器進行濾波,得到的中頻信號表達式為
對中頻信號以采樣頻率fs進行K點采樣得到離散采樣序列,其表達式為
式中,k=0,1,2,…,K-1為采樣頻點。
2 方法描述
2.1 距離像估計
式中,n=0,1,2,…,N-1 為距離索引點。經過距離維FFT,可以獲得目標距離像。
2.2 多普勒像估計
相鄰周期的Chirp在距離維FFT譜中的峰值位置幾乎沒有發生變化,但是目標在Chirp 間的微小距離變化會引起中頻信號的初相的變化。由傅里葉變換特性可知,信號的初相體現在峰值處對應的相位,因此計算相鄰周期Chirp 相位差,即可得到目標的速度。相鄰周期Chirp 相位差可以通過FFT 獲取,這個過程稱為多普勒維FFT[4]。相鄰周期Chirp的相位差表達式為
式中,Δr=vhT是目標在相鄰Chirp 間的微小距離變化。對相同距離頻點下的M個Chirp 進行M點FFT,則式(7)變為
式中,m=0,1,2,…,M-1 為多普勒頻率索引點。經過多普勒維FFT,可以獲得目標多普勒像。
2.3 CFAR目標檢測器
CFAR 目標檢測器能夠根據雷達雜波數據動態調整檢測門限,在虛警概率保持不變的情況下實現目標檢測概率最大化,CFAR 目標檢測器如圖3所示。
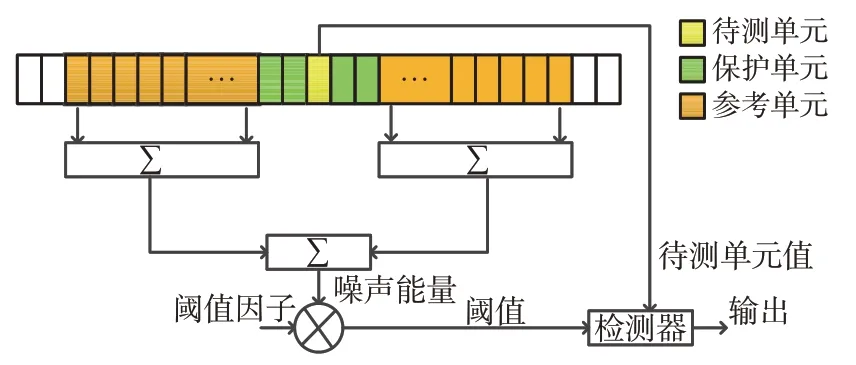
圖3 CFAR目標檢測器
2.4 相位矯正
目標的運動會產生多普勒相偏,這會導致無法正確進行角度估計,因此必須對目標運動引起的相位變化進行補償矯正[15]。根據文獻[15]提出的相位補償方法進行補償之后的信號表達式變為
2.5 角度估計
為了產生稀疏性,將來波方向進行網格劃分,將式(13)改寫為
式中,K為劃分的網格數,且K?H。
進一步,將多個虛擬陣元的數據進行堆疊,上式寫成矩陣形式:
測量數據y的理論協方差矩陣表示為
在實際中,理論協方差矩陣通常是通過樣本協方差矩陣進行估計:
根據文獻[13],考慮以下用于稀疏信號恢復的正則化最小化方法:
其中,
x和σ2的初始估計值通過延時求和(DAS)方法進行初始化,結合循環優化迭代,可以得到x和σ2的新估計值。迭代過程分為兩部分,估計x的時候保持σ2不變,估計σ2的時候保持x不變。SLIM的迭代更新公式求解如下:
如圖4所示,假設方向網格的間隔為1°,在距離均為100 m、角度分別為1°和2°的兩個網格點的橫向距離x1和x2分別為1.74 m 和3.48 m,格點間的橫向距離誤差能夠達到1.74 m,這樣的離網誤差會導致目標定位出現巨大偏差,如果不加以糾正,提供給ADAS 系統的點云數據將是不可靠、不準確的,無法與其他傳感器數據進行融合,因此必須解決離網誤差問題。
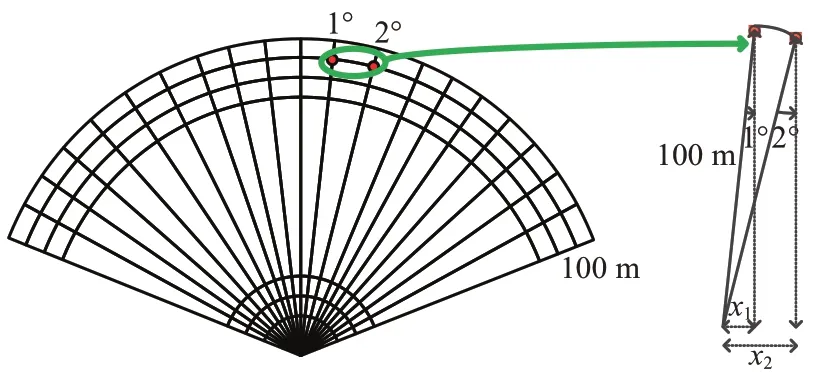
圖4 離網誤差示意圖
為了解決離網誤差問題,我們利用ML 準則的統計特性,將SLIM 方法的角度估計結果通過最小化ML 成本函數來細化方向網格,使得細化的方向網格與實際來波方向不斷接近,以此來消除網格誤差。
根據文獻[16],x的隨機負對數似然函數可以表示為
定義干擾協方差矩陣為
將矩陣求逆引理(A+BCD)-1=A-1-A-1B·(C-1+DA-1B)-1DA-1應用于式(24),可得
將式(27)和式(28)代入式(23)得到
式中,
ML 代價函數分解為兩部分:不包含θk的邊緣似然函數L(θ-k)和與θk有關的函數l(θk)。因此,關于θk的ML 代價函數的最小化問題與關于θk的函數l(θk)的最小化問題等價,所以θk的細化過程可以通過最小化式(30)得到。在本文中,l(θk)的最小化問題使用Nelder-Mead 算法求解,在MATLAB中使用的是“fminsearch”函數。
本節提出的高精度測角方法的流程總結如表1所示。
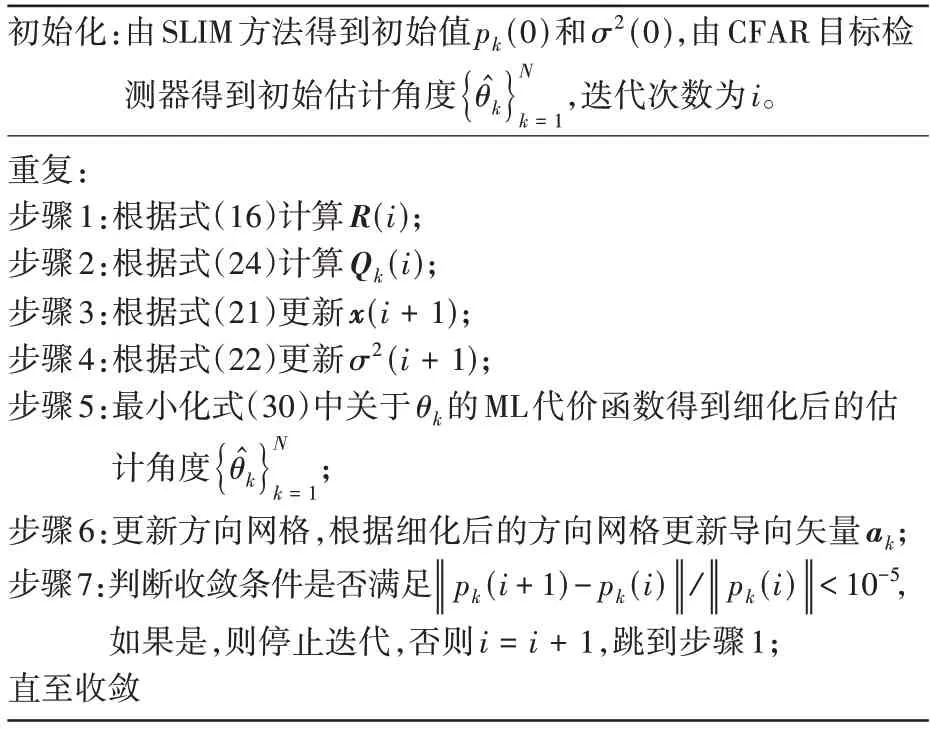
表1 方法流程
從前面的分析可以知道,本節提出的測角方法主要包含SLIM 和ML兩部分。SLIM 的主要計算量來自于矩陣R的求逆,其復雜度為O(L2K)。ML的主要計算量來自于矩陣Qk的求逆和ML 代價函數最小化的求解,計算量分別為O(L2K)和O(K3),因此本節方法的計算復雜度為O(2L2K+K3)。可以看出,本節方法是在犧牲一定計算量的情況下對測角的精度進行提升。
2.6 點云成像信號處理流程
綜上,基于本文提出的高精度測角方法的點云成像信號處理流程如圖5所示。
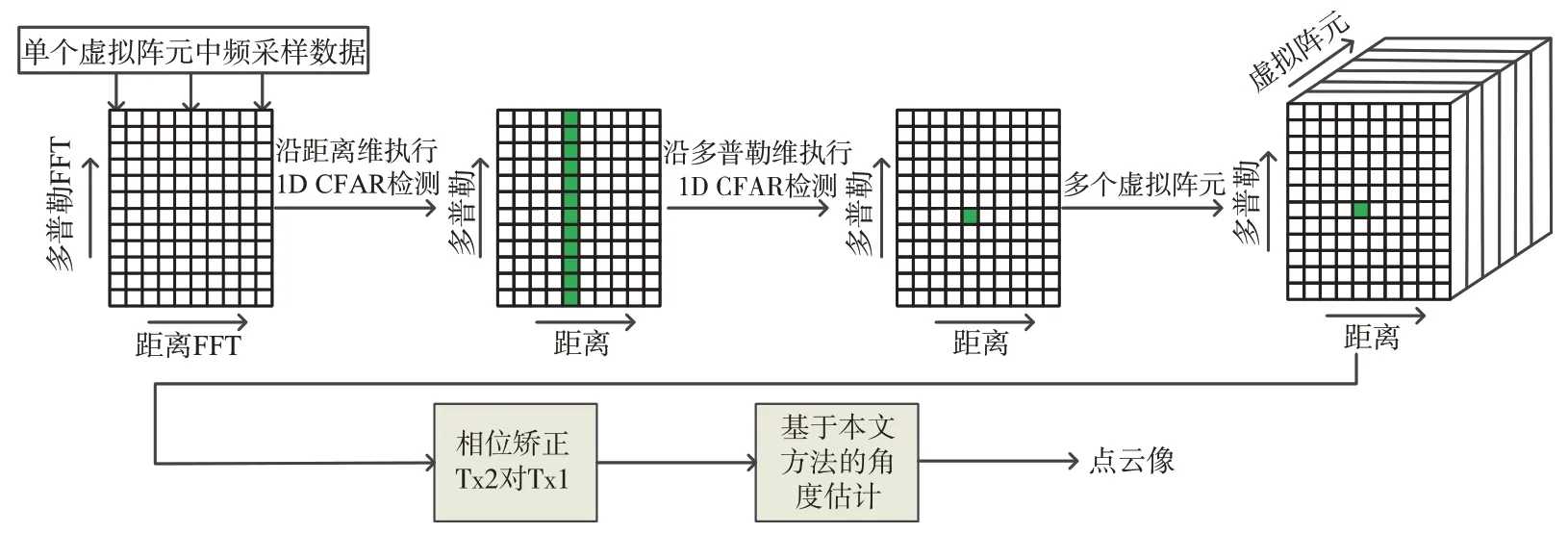
圖5 本文成像方法的信號處理流程框圖
3 仿真和實驗結果分析
3.1 仿真數據處理結果分析
本文仿真的運行平臺為聯想筆記本電腦Y7000P,CPU 型號為i5-12500H,仿真軟件為MATLAB2020a。根據控制變量法思想,我們設置點目標的距離和速度相同、角度不同,從而驗證基于不同測角方法的成像性能。仿真系統參數設置如表2所示,目標參數設置如表3所示。
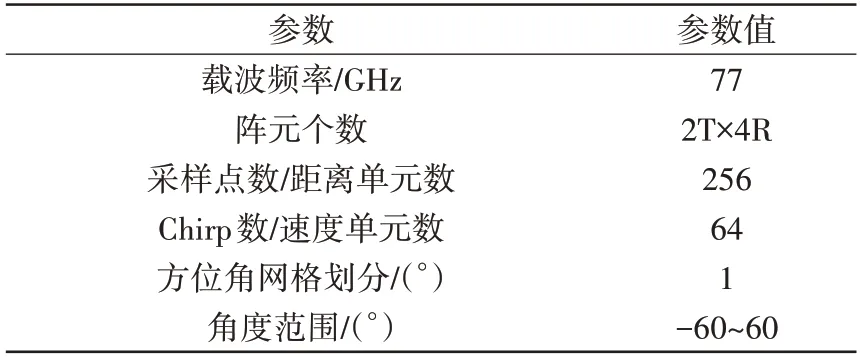
表2 系統參數

表3 目標參數
圖6 為經過距離FFT 和多普勒FFT 之后生成的距離-多普勒圖,圖中紅色圓圈為經過CFAR 目標檢測器之后的目標檢測點,檢測到的距離為8.02 m,速度為5.07 m/s,與實際設置參數基本一致。因此,使用FFT 方法進行距離像和多普勒像估計,經過CFAR 目標檢測器,能夠得到正確的目標點距離和速度。
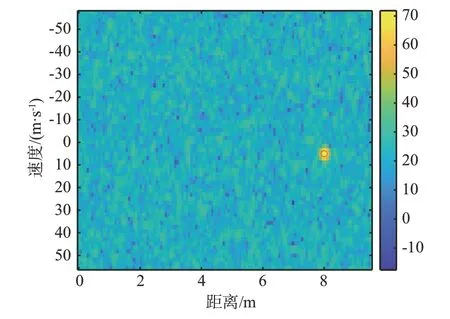
圖6 距離-多普勒圖生成及目標檢測結果
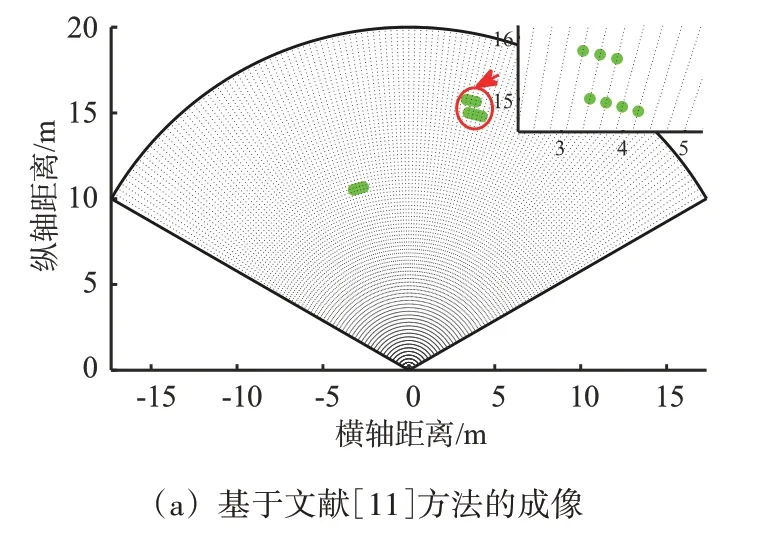
為了驗證本文的成像方法具有高精度的特點,接下來,我們利用目標索引點對應的多個虛擬陣元數據使用不同測角方法進行距離-角度二維點云成像,這些測角方法包括文獻[11]提出的RIAA方法、文獻[13]提出的SLIM 方法以及本文提出的方法。圖7 給出了基于不同測角方法的點云成像圖,圖中相鄰虛線網格間隔為1°。可以看出文獻[11]提出的方法分辨率較低,無法分辨角度相近的兩個目標,經過CFAR 目標檢測器之后會產生虛假目標點。文獻[13]提出的方法可以有效抑制功率泄露,能夠分辨角度相近的兩個目標,相比文獻[11]提出的方法,其分辨率更高,旁瓣更低,經過CFAR 目標檢測器之后沒有產生虛假目標點。因為我們設定的點目標其方位向并不在劃分的網格點上面,所以我們發現基于這些測角方法的成像結果都存在離網誤差,只有本文提出的成像方法能夠準確估計目標來波方向,消除了離網誤差,精度達到了0.1°。
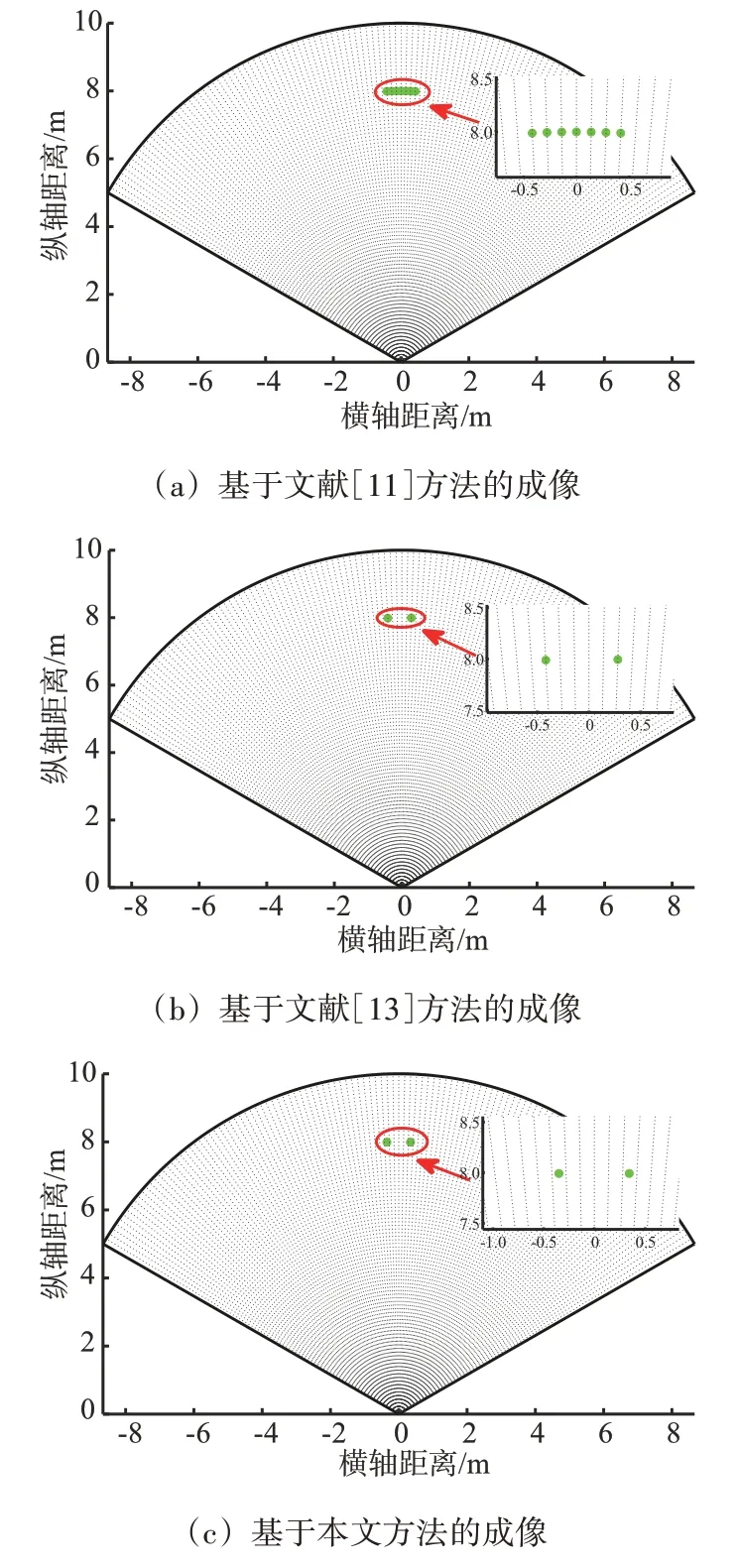
圖7 距離-角度二維點云成像
為了進一步說明本文方法的測角精度性能,我們進行了500 次的蒙特卡洛實驗。定義均方根誤差(RMSE)為
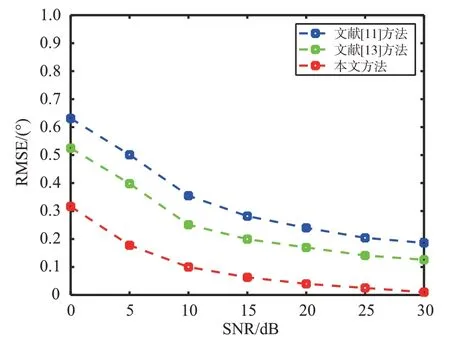
圖8 不同測角方法的RMSE隨SNR變化曲線
從圖8 可以看出,所有測角方法的RMSE 均隨著信噪比的增加而減小,其中本文提出的高精度測角方法的RMSE 始終保持在一個較低的值。因此,根據RMSE 曲線可知,本文方法估計值更接近信源的真實值,算法更加穩健。
隨著信噪比的進一步下降,對文獻[11]方法的影響最大,因為在信噪比較低時小奇異值會與大奇異值相當,從而導致該方法的噪聲抑制性能變弱,角度分辨率進一步降低,最終的成像結果會出現更多的雜波點。文獻[13]方法由于是基于上一次的值進行更新迭代噪聲值,所以噪聲抑制性能相比來說更強,成像結果會出現更少的雜波點。本文方法是在文獻[13]方法的基礎上增加了ML 估計,因此噪聲抑制性能相對來說沒有損失,并且在最小化ML 成本函數的過程中依然不斷更新迭代噪聲值,所以在提高噪聲抑制性能的同時能夠進一步提高測角精度,從成像結果來看仍然能夠使得點云出現在偏離網格點的位置。
3.2 實測數據處理結果分析
為了測試本文方法在實際場景中的表現,本文設計了兩個不同的場景分別對靜止目標和運動目標進行成像。靜態場景是為了驗證不同測角方法在實際場景中的角度分辨率,動態場景是為了驗證不同成像方法在實際動態場景中的成像效果。
實驗所使用雷達系統由德州儀器公司的汽車雷達傳感器評估模塊AWR1843 和數據采集卡DCA1000 組成。通過配套的mmWave Studio 軟件對AWR1843 的發射波形參數進行配置并啟動發射信號,數據采集卡DCA1000 將AWR1843 處理后的中頻數據進行打包并通過網口將數據傳輸給PC機,在PC機上面對中頻數據進行信號處理。
3.2.1 靜態場景
靜態實驗場景如圖9所示。在雷達正前方的13 m 左右的地方靜止站立兩個人體目標,兩目標的間隔角度大約5°。

圖9 靜態場景
圖10 為距離-多普勒圖,圖中紅色圓圈為經過CFAR 目標檢測器之后的目標檢測點。從圖中可以看出檢測到速度相同、距離相同的一個點目標。該點目標的距離為12.83 m、速度為0 m/s,和實際目標參數一致。
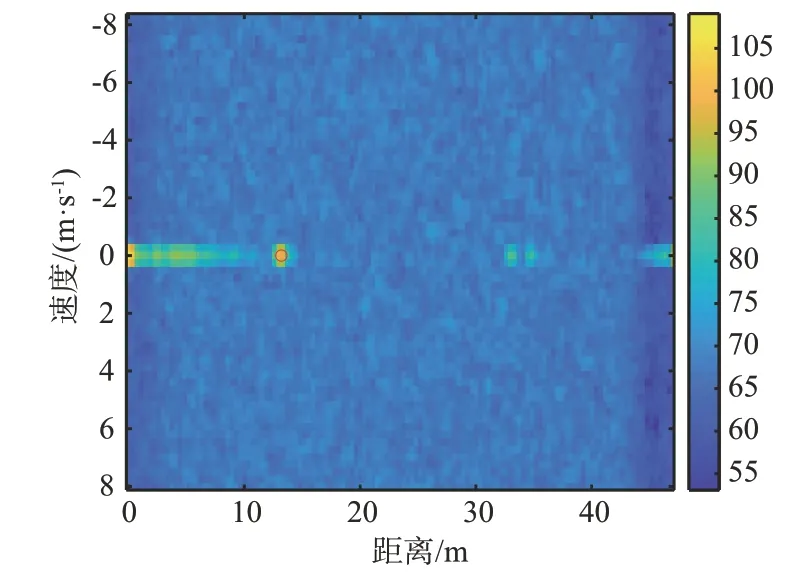
圖10 距離-多普勒圖生成及目標檢測結果
圖11 給出了基于不同測角方法的點云成像圖,圖中相鄰虛線網格間隔為1°。與仿真結果一樣,文獻[11]方法由于分辨率較低無法分辨角度相近的兩個目標,產生了許多虛假目標點。文獻[13]方法相比文獻[11]方法,其分辨率更高、旁瓣更低,經過CFAR 目標檢測器之后沒有產生虛假目標點。我們可以看出,基于這些方法產生的點云都出現在固定角度網格上面,但是本文提出的成像方法能夠使得點云出現在偏離網格點的位置,更加準確地估計目標方向,得到更加精準的點云數據,這為后面的聚類、跟蹤等信號處理提供了精準、可靠的點云數據。
3.2.2 動態場景
動態實驗場景如圖12所示。在雷達的左前方有一個人體目標在遠離雷達方向運動,右前方有一輛電動車也在遠離雷達方向運動。

圖12 動態場景
圖13 為距離-多普勒圖,圖中紅色圓圈為經過CFAR 目標檢測器之后的目標檢測點。從圖中可以看出根據距離-多普勒圖能夠檢測出運動的人體和車輛目標。通過數據比對,發現檢測到的距離和速度參數與實際運動參數一致。
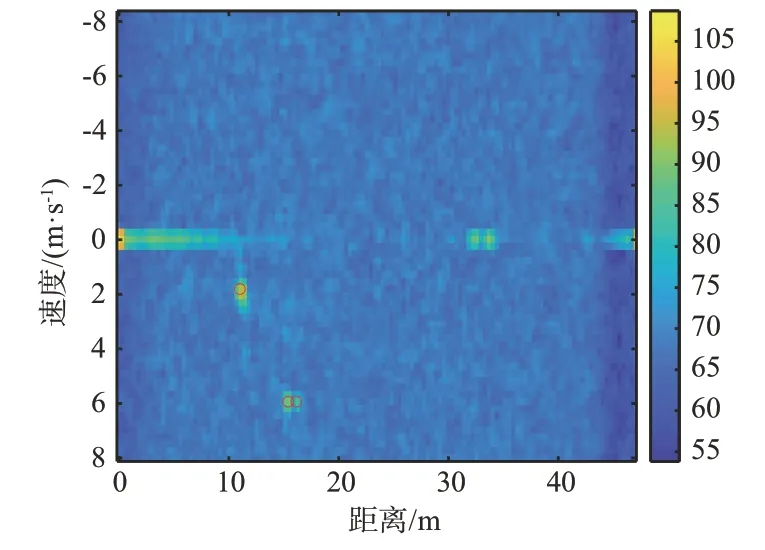
圖13 距離-多普勒圖生成及目標檢測結果
圖14給出了基于不同測角方法的點云成像圖,圖中相鄰虛線網格間隔為1°。我們將電動車的點云像進行局部放大,可以發現,和靜態成像場景類似,只有本文提出的成像方法產生的點云會出現在偏離固定角度網格的位置,得到更加精準的點云數據。
經過靜態場景和動態場景的實驗,驗證了本文提出的成像方法不管對靜止目標還是動態目標進行成像,都能夠得到更加精準的點云數據。
4 結束語
針對現有的車載毫米波雷達高分辨成像方法因存在離網誤差導致精度低的問題,通過利用ML準則的統計特性,本文提出了一種SLIM 和ML 估計相結合的高精度測角方法用于點云成像。仿真和實驗結果表明:相比于其他成像方法,本文提出的成像方法得到的點云像在角度維精度更高,精度能夠達到0.1°,具有高精度的特點,解決了由于離網誤差導致目標定位出現巨大偏差的問題。將本文提出的成像方法用于車載場景中,能夠為ADAS系統提供精準、可靠的點云數據。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
