基于平面約束人工勢場的無人機航跡規劃算法
2023-11-01 10:17:33高璕張磊胡高歌楊子江高兵兵
航空科學技術 2023年8期
關鍵詞:無人機
高璕 張磊 胡高歌 楊子江 高兵兵
摘 要:航跡規劃是實現無人機自主導航飛行的關鍵。針對人工勢場法應用于無人機航跡規劃時出現的規劃失敗、實用性不強的問題,本文提出一種基于平面約束人工勢場的航跡規劃算法。首先,利用約束平面切割障礙物,簡化了障礙物的分布。其次,構建航跡的可行性約束條件,并建立了基于約束平面的人工勢場法。最后,綜合并改進了一種額外控制力法和常用的改進勢場函數。仿真驗證表明,該算法克服了傳統人工勢場法未考慮無人機物理性能限制、易陷入局部最小值以及目標不可達的問題,同時提高了航跡規劃質量。通過本文研究,人工勢場法的不足得到了改善,有利于人工勢場法在無人機航跡規劃領域的應用與發展。
關鍵詞:無人機; 航跡規劃; 人工勢場法; 避障; 額外控制力法
中圖分類號:V249 文獻標識碼:A DOI:10.19452/j.issn1007-5453.2023.08.009
無人機具有尺寸小、成本低、使用靈活、適用范圍廣、生存能力強等優點,因此廣泛應用于軍事、農業、交通等領域[1-2]。然而,隨著無人機飛行環境和所承擔任務的復雜性逐漸增加,作為實現其自主導航飛行的關鍵,航跡規劃的難度也日益增大,已成為制約無人機發展的技術瓶頸之一[3-4]。
航跡規劃是指根據飛行任務的需要,設計出一條從起點到目標點的最優飛行軌跡,要求符合無人機物理性能約束并使綜合代價最小。目前,國內外學者已經提出許多航跡規劃方法,如A*算法、快速搜索隨機樹(RRT)算法、蟻群算法、粒子群算法、人工勢場法等。A*算法通常能規劃出具有最短航線長度的航跡,但計算時間隨問題規模增長呈指數級增加[5-6]。RRT算法無須對系統進行建模,能實時快速地完成航跡規劃,但存在隨機性高、路徑并非最優等問題[5,7]。蟻群算法具有魯棒性強、信息反饋好等優點,但算法效果過于依賴參數的選擇、易陷入局部最優解[8]。粒子群算法原理簡單、執行優化任務時效果好,但容易過早收斂,陷入局部最優[9-10]。相比而言,人工勢場法結構簡單,具有規劃速度快、航跡平滑、安全性高等優點,因此在航跡規劃領域得到了廣泛應用[11]。
傳統人工勢場法也存在未考慮無人機物理性能限制、易陷入局部最小值、目標不可達等問題,最終導致航跡規劃失敗或規劃結果實用性不高。因此,國內外學者提出了許多優化算法。文獻[12]研究了同時存在硬障礙物和軟障礙物環境下的無人機航跡規劃問題,通過引入基于某些標準(如生存概率)的額外控制量將原問題轉化為多目標優化問題,并利用該額外控制量有效避免了局部最小值的產生。針對目標不可達問題,文獻[13]提出一種考慮了無人機與目標之間相對距離的改進勢場函數,使無人機能順利抵達目標點。這是一種常用的改進人工勢場法,已被諸多文獻采用和優化[14-16]。文獻[17]考慮了實際應用中無人機或障礙物位置定位不精確的問題,提出一種混合了定位風險場和人工勢場的航跡規劃方法,生成的航跡更安全有效。然而文獻[12]、[13]和[17]均專注于局部最小值、目標不可達等問題,卻忽視了或者沒有充分考慮無人機的物理性能限制,尤其是高度方向上的物理性能限制。
為了解決上述問題,本文提出一種基于平面約束人工勢場的無人機航跡規劃算法。該算法定義了一個特殊平面為約束平面,并利用該約束平面切割障礙物,簡化了障礙物的分布;建立了基于約束平面的人工勢場法,利用約束平面和水平面的關系,使航跡規劃結果滿足了可行性約束條件;綜合并改進了額外控制力法[18]和文獻[13]提出的勢場函數,以克服易陷入局部最小值、目標不可達的不足。最后,本文通過仿真試驗對比了基于約束平面的人工勢場法、文獻[13]提出的改進人工勢場法、傳統人工勢場法在面對無人機物理性能限制、局部最小值、目標不可達等問題時的性能,驗證了所提出算法的有效性。
1 傳統人工勢場法的缺陷
人工勢場法應用于航跡規劃領域時,主要原理是將無人機和飛行空間分別抽象為一個質點和一個虛擬勢場,進而將航跡規劃問題轉化為質點在勢場中的運動問題。
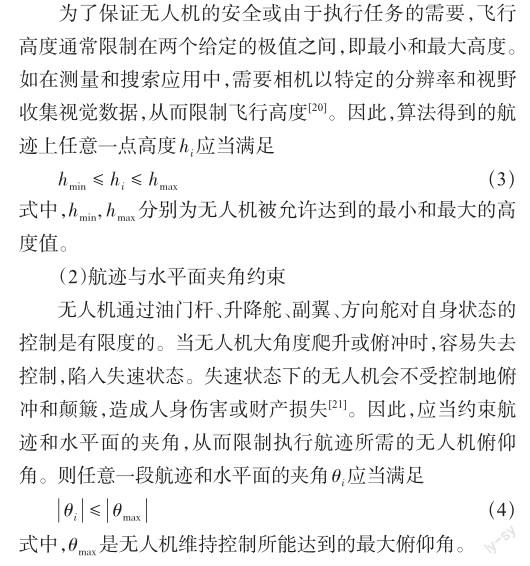
傳統人工勢場法的主要缺陷有:一是目標不可達。當目標在障礙物的影響范圍之內時,隨著無人機向目標的逼近,式(2)中的障礙物勢場會快速增加,致使整個勢場的全局最小點并不是目標點,此時勢場中無人機無法靠近、抵達目標點,航跡規劃失敗。二是易陷入局部最小值。勢場產生的引力和斥力合力角度相差為180°,且斥力和引力大小達到某個平衡或者接近平衡時,算法會產生局部最小值,此時無人機停留原地、無法繼續前進,航跡規劃失敗。三是未考慮無人機物理性能限制:式(1)、式(2)建立人工勢場時未考慮物理性能限制,導致無人機無法按照預定航線飛行,此時航跡規劃結果不具有可行性。航跡能夠被無人機執行是保證航跡規劃算法實用性的前提,而無人機的物理性能限制與航跡的可行性密切相關,它包括無人機高度限制、最大俯仰角等[20-21]。
2 基于平面約束人工勢場的無人機航跡規劃算法
2.1 航跡可行性約束條件的構建
本文以固定翼無人機為研究對象,采用以油門桿、升降舵、副翼、方向舵控制無人機質心位移、繞質心轉動的模型,并規定無人機近似勻速飛行。受無人機的物理性能限制,三維環境下航跡為了保證可行性,必須滿足以下約束條件。
(1) 航跡高度約束
2.2 障礙物模型的建立
無人機飛行時會遭遇一些無法穿越或存在危險的障礙物,因此在航跡規劃之前必須對障礙物進行合理的描述。本文采用幾何圖形來建立障礙物模型,并通過包裹、連鎖、膨脹處理將障礙物分布從密集復雜變得簡單方便,解決了人工勢場法有時因障礙物過于密集而無法完成航跡規劃任務的問題。
處理過程如圖1所示,將兩個不規則障礙物優化為了圓形障礙物。在三維環境下,包裹、連鎖、膨脹處理后得到的是球形障礙物。圖1中,r1、r2分別為障礙物1、2中心到邊界的最大距離;r12是包裹處理后兩圓形障礙物之間的距離;r3為連鎖處理后得到的障礙物半徑;r′為膨脹處理時半徑擴大的增量。

包裹處理:以不規則障礙物為對象,將不規則障礙物優化為圓形/球體障礙物。連鎖處理:以包裹后r12≤2ρ0的密集障礙物為對象,優化為一個較大的障礙物。若包裹后r12> 2ρ0,則跳過連鎖處理。膨脹處理:包裹和連鎖(或跳過連鎖)處理后,為降低無人機與障礙物碰撞的概率,拓展所有障礙物的邊界。


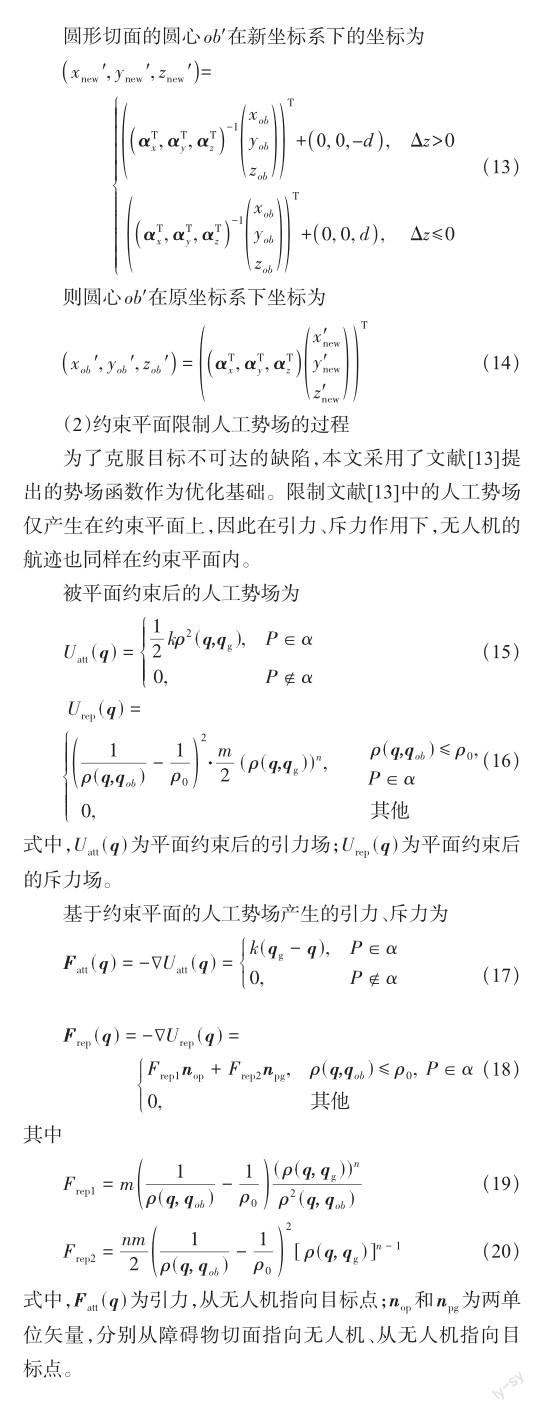
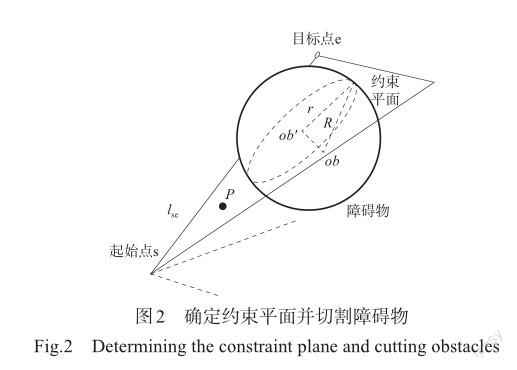
同時,需要指出的是,此時障礙物已經被約束平面切割,從球形變成了圓形切面。因此在式(15)~式(20)所涉及的計算過程中,障礙物參數均使用r和ob′的數據。
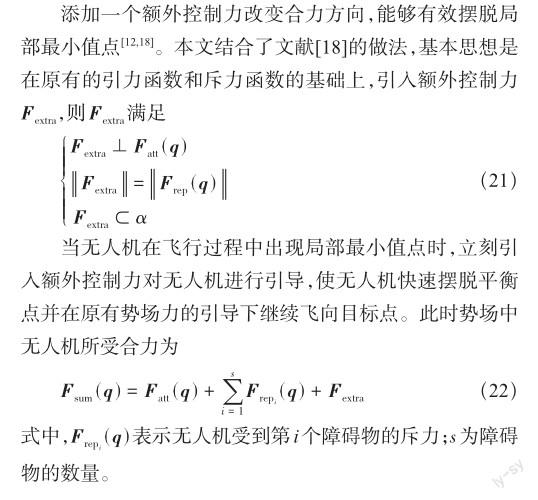
(3)結合額外控制力法的過程
3 航跡規劃算法分析
基于平面約束人工勢場的無人機航跡規劃算法的優勢主要體現在克服了未考慮無人機物理性能限制、易陷入局部最小值、目標不可達的問題,并且能提高航跡規劃質量。
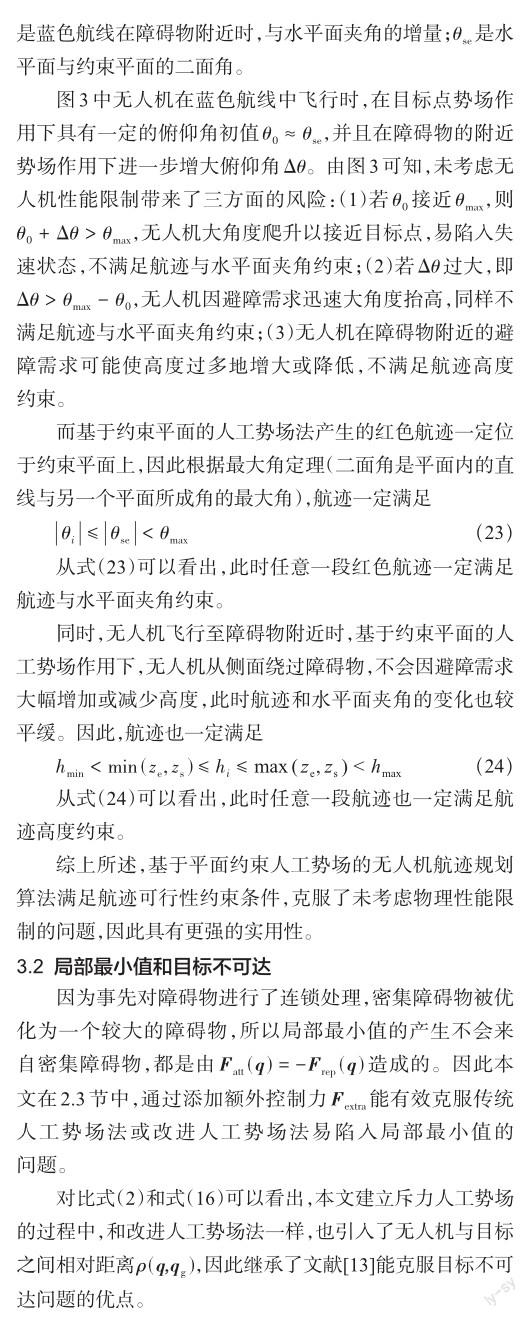
3.1 無人機物理性能限制
基于約束平面的人工勢場、傳統人工勢場法以及文獻[13]的改進人工勢場法航跡規劃過程的對比如圖3所示。


3.3 航跡規劃質量
約束平面切割障礙物的過程中,會出現如圖4所示的兩種情形。
障礙物2和約束平面不相交,則該障礙物不產生斥力勢場,即在規劃航跡時認為該障礙物不存在。這種情況的存在能有效減少障礙物的數量,進而減少航跡長度、提高規劃成功率。另一種情況是障礙物1則被約束平面切割成圓形,則圓形切面的半徑r一定滿足r≤R,這種情況下障礙物半徑被縮小,因此減少了避障需求對航跡的影響,進而減少航跡長度、提高目標的可達性。

4 航跡規劃仿真
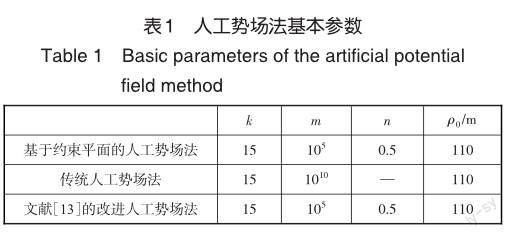
4.1 仿真參數
將基于約束平面的人工勢場法與傳統人工勢場法、文獻[13]的改進人工勢場法進行對比試驗。三種算法基本參數見表1。
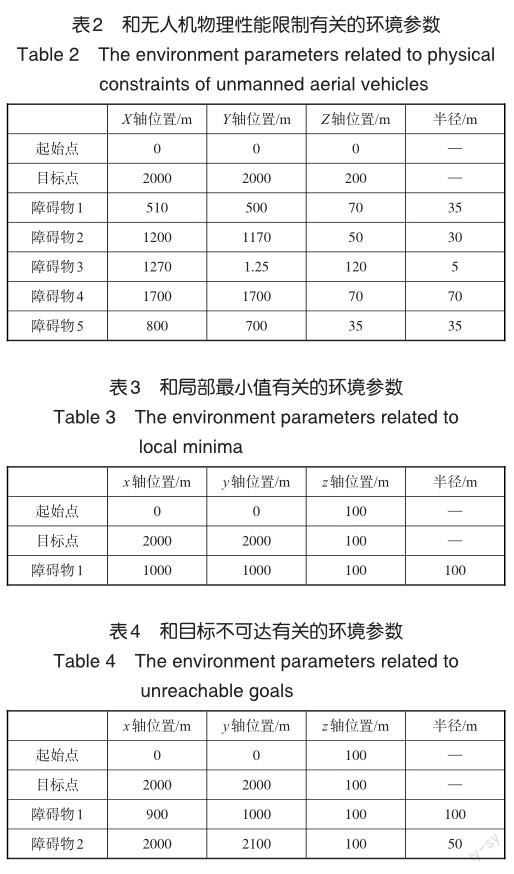
在無人機物理性能限制、局部最小值、目標不可達的相關問題上,為驗證所提出算法的性能,并比較三種算法的實用性、航跡規劃質量,分別設置不同的環境參數,見表2~表4。表2中,障礙物2、3經過連鎖處理后簡化為了一個障礙物。表3、表4中,為了方便觀察,將起始點、目標點、障礙物球心均設置在同一高度,此時航跡規劃問題的環境實際簡化為了二維,約束平面就是該高度的水平面。因此在仿真結果中,不給出三維環境下才有意義的航跡與水平面的夾角變化曲線、航跡高度變化曲線。
4.2 仿真結果與分析
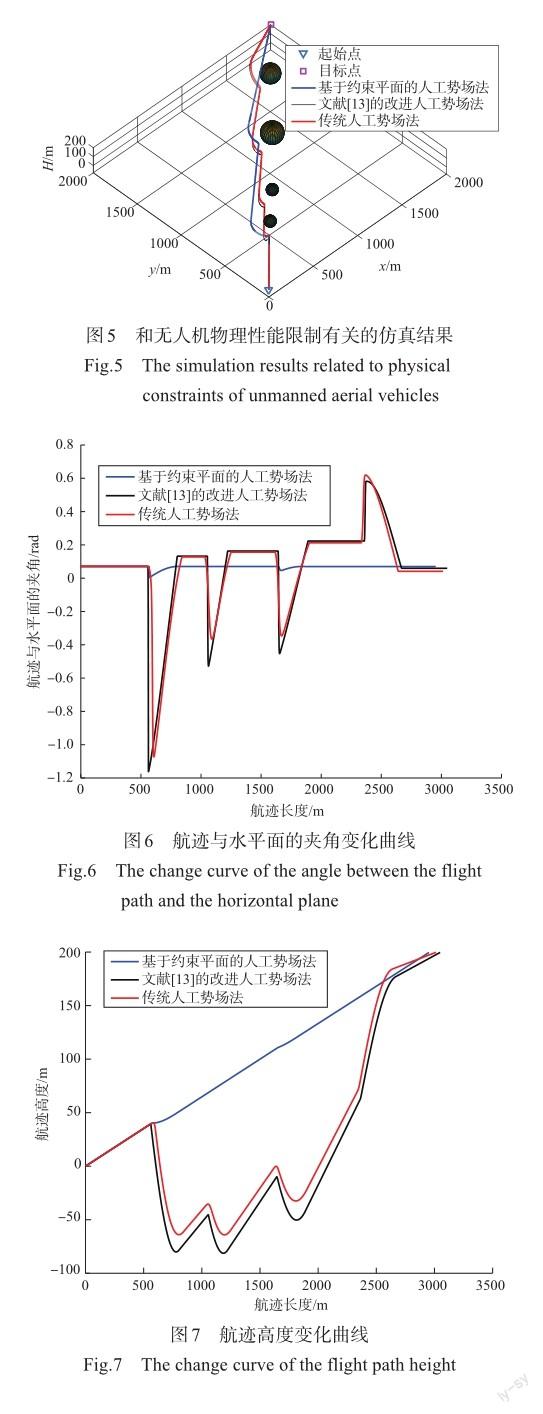
無人機物理性能限制相關環境參數(見表2)得到的仿真結果如圖5所示。由圖5可知,基于約束平面的人工勢場法得到的航跡僅需無人機做出兩個簡單的轉彎機動,即可躲避障礙物到達目標點。可以看出,基于約束平面的人工勢場法能得到更簡單實用的航跡,節約了無人機的飛行資源。航跡與水平面的夾角變化曲線、航跡高度變化曲線,如圖6、圖7所示。基于約束平面的人工勢場法曲線變化平緩,滿足了無人機物理性能限制,因此實用性更好。而傳統人工勢場法和改進人工勢場法航跡與水平面的夾角變化劇烈,最大值分別達到了-1.074~1.162rad,明顯超出了常用無人機維持控制所能達到的最大俯仰角;高度最低時分別達到了-64.07m、-81.26m,明顯超出了起始點到目標點的高度范圍0~200m,有超出航跡高度約束的風險。
同時,基于約束平面的人工勢場法、傳統人工勢場法以及改進人工勢場法的航跡總長度分別為2.95km、3.01km、3.05km。相比于傳統人工勢場法和改進人工勢場法,基于約束平面的人工勢場法分別減少了2.00%、3.28%的航跡長度,提高了航跡規劃質量。局部最小值相關環境參數(見表3)得到的仿真結果如圖8所示。

由圖8可知,改進人工勢場法和傳統人工勢場法分別在(841.5m 841.5m 100m)、(851.7m 851.7m 100m)處陷入局部最小值,航跡規劃失敗。而基于約束平面的人工勢場法能克服局部最小值,順利完成了航跡規劃任務。此時,基于約束平面的人工勢場法得到的航跡總長2.97km。
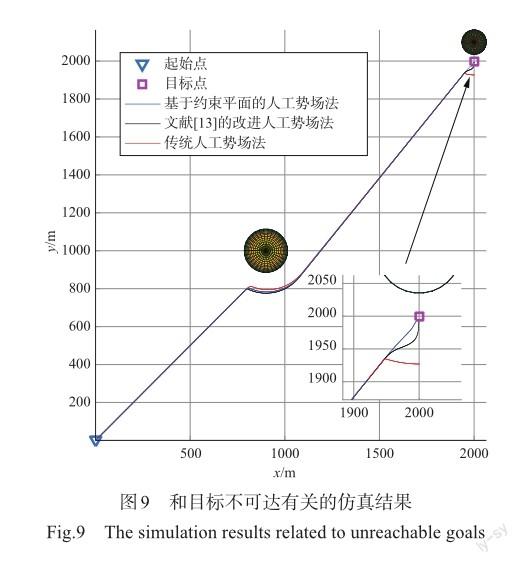
目標不可達相關環境參數(見表4)得到的仿真結果如圖9所示。傳統人工勢場法在(1999m 1927m 100m)處由于障礙物2的影響而無法抵達目標點,此時距離目標點還有73.01m。但基于約束平面的人工勢場法和改進人工勢場法均能完成航跡規劃。
同時,基于約束平面的人工勢場法、改進人工勢場法的航跡總長度分別為2.90km、2.91km。結合圖9航跡可知,在二維環境下,若兩種算法都能完成航跡規劃任務,則它們的規劃結果是相似的。
5 結論
本文針對傳統人工勢場法存在的規劃失敗、實用性不強的問題,提出一種基于平面約束人工勢場的航跡規劃算法。本文創新性在于通過利用約束平面切割障礙物提高了航跡規劃質量;通過建立基于約束平面的人工勢場克服了未考慮無人機物理性能限制的問題;通過綜合并改進一種額外控制力法和常用的改進勢場函數,克服了易陷入局部最小值以及目標不可達的問題。經仿真驗證,相比于傳統人工勢場法和文獻[13]的改進人工勢場法,基于約束平面的人工勢場法順利地完成了航跡規劃任務,得到的航跡規劃結果簡單平緩,總長更短。
參考文獻
[1]彭錦城, 彭俠夫, 張霄力, 等. 基于改進Hybrid A*的旋翼無人機路徑規劃算法[J]. 航空科學技術, 2022, 33(12): 105-110. Peng Jincheng, Peng Xiafu, Zhang Xiaoli, et al. Path planning method for rotorcraft unmanned aerial vehicles based on improved Hybrid A* algorithm[J]. Aeronautical Science & Technology, 2022, 33(12): 105-110. (in Chinese)
[2]Raparelli E, Bajocco S. A bibliometric analysis on the use of unmanned aerial vehicles in agricultural and forestry studies[J]. International Journal of Remote Sensing, 2019, 40(24): 9070-9083.
[3]吳坤, 池沛, 王英勛, 等. 基于混沌灰狼優化的多無人機協同航路規劃[J]. 航空科學技術, 2022, 33(10): 82-95. Wu Kun, Chi Pei, Wang Yingxun, et al. Collaborative path planning of multiple unmanned aerial vehicles based on chaotic grey wolf optimization[J]. Aeronautical Science & Technology, 2022, 33(10): 82-95. (in Chinese)
[4]Khan M T R, Saad M M, Yang Ru, et al. Aspects of unmanned aerial vehicles path planning: Overview and applications[J]. International Journal of Communication Systems, 2021, 34(10): e4827.
[5]Tsai Y J, Lee C S, Lin Chunliang, et al. Development of flight path planning for multirotor aerial vehicles[J]. Aerospace, 2015, 2(2): 171-188.
[6]Zhao Yijing, Zheng Zheng, Liu Yang. Survey on computational-intelligence-based UAV path planning[J]. Knowledge-Based Systems, 2018,158: 54-64.
[7]Yang Fan, Fang Xi, Gao Fei, et al. Obstacle avoidance path planning for UAV based on improved RRT algorithm[J]. Discrete Dynamics in Nature and Society, 2022,15: 1-9.
[8]Huang Chenxi, Lan Yisha, Liu Yuchen, et al. A new dynamic path planning approach for unmanned aerial vehicles[J]. Complexity, 2018,15: 1-17.
[9]Huang Chen, Zhou Xiangbing, Ran Xiaojuan, et al. Adaptive cylinder vector particle swarm optimization with differential evolution for UAV path planning[J]. Engineering Applications of Artificial Intelligence, 2023,121: 105942.
[10]Shao Shikai, Peng Yu, He Chenglong, et al. Efficient path planning for UAV formation via comprehensively improved particle swarm optimization[J]. ISA Transactions, 2020, 97: 415-430.
[11]Aggarwal S, Kumar N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges[J]. Computer Communications, 2020,149: 270-299.
[12]Luo Guanchen, Yu Jianqiao, Mei Yuesong, et al. UAV path planning in mixed‐obstacle environment via artificial potential field method improved by additional control force[J]. Asian Journal of Control, 2015, 17(5): 1600-1610.
[13]Ge S S, Cui Y J. New potential functions for mobile robot path planning[J]. IEEE Transactions on Robotics and Automation, 2000,16(5): 615-620.
[14]Chen Yanli, Bai Guiqiang, Zhan Yin, et al. Path planning and obstacle avoiding of the USV based on improved ACO-APF hybrid algorithm with adaptive early-warning[J]. IEEE Access, 2021(9): 40728-40742.
[15]Li Weihao, Yang Chenguang, Jiang Yiming, et al. Motion planning for omnidirectional wheeled mobile robot by potential field method[J]. Journal of Advanced Transportation, 2017(3): 1-11.
[16]Li Zhenhua, Yang Xiaojun, Sun Xiangdong, et al. Improved artificial potential field based lateral entry guidance for waypoints passage and no-fly zones avoidance[J]. Aerospace Science and Technology, 2019,86: 119-131.
[17]Shin Yujin, Kim E. Hybrid path planning using positioning risk and artificial potential fields[J]. Aerospace Science and Technology, 2021,112: 106640.
[18]Wang Honglun, Lyu Wentao, Yao Peng, et al. Threedimensional path planning for unmanned aerial vehicle based on interfered fluid dynamical system[J]. Chinese Journal of Aeronautics, 2015, 28(1): 229-239.
[19]Khatib O. Real-time obstacle avoidance for manipulators and mobile robots[C]//Proceedings of 1985 IEEE International Conference on Robotics and Automation. IEEE, 1985.
[20]Phung M D, Ha Q P. Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization[J]. Applied Soft Computing, 2021, 107: 107376.
[21]Han Bing, Qu Tengteng, Tong Xiaochong, et al. Gridoptimized UAV indoor path planning algorithms in a complex environment[J]. International Journal of Applied Earth Observation and Geoinformation, 2022,111: 102857.
UAV Path Planning Method Based on Plane-constrained Artificial Potential Field
Gao Xun1,2, Zhang Lei3, Hu Gaoge1,2, Yang Zijiang1,2, Gao Bingbing1,2
1. Northwest Polytechnical University, Xi’an 711072, China
2. Research & Development Institute of Northwestern Polytechnical University in Shenzhen, Shenzhen 518057,China
3. AVIC Aeronautical Computing Technique Research Institute, Xi’an 710065, China
Abstract: Path planning is the key to realize autonomous navigation flight of Unmanned Aerial Vehicles (UAV). This paper proposed an UAV path planning method based on plane-constrained artificial potential field in order to overcome the problems of planning failure and low practicality when applying the artificial potential field method to UAV path planning. Firstly, the use of the constraint plane to cut obstacles simplified the distribution of obstacles. Secondly, the feasibility constraints of flight path were constructed, and the artificial potential field based on the constraint plane was established. Finally, this paper synthesized and improved the extra control force method and commonly used improved potential field functions. Simulations have verified that the proposed method overcomes the problems that traditional artificial potential field method does not consider the physical performance limitations of UAVs, is easy to fall into local minima and unable to reach targets. At the same time, the path planning quality is improved. Through the research, the shortcomings of artificial potential field method have been improved, which is conducive to the application and development of artificial potential field method in the field of UAV path planning.
Key Words: unmanned aerial vehicle; path planning; artificial potential field method; obstacle avoidance path; extra control force method
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26