基于影像及小波變換的橋梁損傷識別
2023-11-04 02:27:04鄭佳艷李衡劉海京劉琰羅仁偉陳海林
科學技術與工程 2023年29期
鄭佳艷, 李衡, 劉海京, 劉琰, 羅仁偉, 陳海林
(1.重慶交通大學土木工程學院, 重慶 400074; 2.招商局重慶交通科研設計研究院有限公司, 重慶 400076)
橋梁是人們生活中最常見的工程結構之一,其結構在風、地震、交通等隨機荷載作用下容易發生振動,關鍵結構構件造成損傷(疲勞和開裂),結構健康監測(structure health monitor)或無損損傷評估(no damage evaluate)對保障結構安全、提高經濟效益有重要的理論意義和工程應用價值。損傷檢測和評估通常包括判斷損傷是否存在、確定損傷位置、估計損傷嚴重程度、評估剩余性能等4個步驟。
近幾十年以來,基于振動的結構健康監測技術在土木工程領域中一直是人們的研究熱點,也是應用最廣泛的無損檢測技術之一,它基于結構動態特征參數的變化識別結構損傷,如固有頻率、振型、模態應變能和頻率響應函數[1-2]。固有頻率[3]是最廣泛使用的基于振動的損傷指標之一,但識別損傷位置非常困難。結構局部發生損傷導致的局部剛度降低會影響損傷區域振型的連續性和光滑性,通過分析振型及其高階導數可用于結構損傷識別[4]。在此基礎上,將振型或振型曲率與信號處理技術相結合,如小波變換、神經網絡和高斯過程分類,可顯著提高損傷檢測的準確性和精度。小波變換(wavelet transform,WT)作為一種高效的信號處理工具可對信號進行局部分析,且對信號微小突變非常靈敏,在結構與機械工程損傷識別和定位的應用已經成為健康監測的熱點研究方向。Shi等[5]提出了一種二維方向連續小波變換的板結構線型損傷檢測算法,通過人工誘導缺口鋁合金夾板的模態試驗驗證了該算法的有效性和實用性。Wu等[6]利用空間小波變換對梁結構在靜力位移下的裂紋檢測進行了實驗研究,結果表明小波變換可以識別或放大這種小擾動,有效定位裂紋位置。Solis等[7]提出了一種新的小波分析梁損傷檢測方法,通過分析振型變化定位損傷。Zhao等[8]基于簡支鋼筋混凝土梁有限元模型中提取的結構模態形狀,利用不同類型小波進行了損傷識別。Katunin等[9]提出一種基于結構剪切測量結果的模態旋轉場差異,并采用基于二維連續小波變換算法進行后處理的損傷識別方法。結果表明,該方法能夠提高損傷的敏感性,能夠有效地識別較小程度的損傷。Cui等[10]提出一種利用空間分布小波熵方法進行呼吸裂縫定位的新方法,在實驗室中,應用該方法對帶有預定義呼吸裂紋的光束振動響應進行了分析,進一步證明該方法的可行性。王盟等[11]將結構瞬時振型差進行小尺度小波變換,利用小波系數實部發生極大值時刻及發生位置識別結構損傷時間和損傷位置并用極大值大小來判定損傷程度,最后用一個懸臂梁和斜拉橋的數值算例驗證了該方法。Sun等[12]研究了使用小波變換分析模態形狀,并從小波系數中提取損傷指標的方法。此外,為了進行比較,還提取了其他兩個損傷指標,即模態形狀曲率和多項式擬合差,研究結果表明,小波分析能夠有效地抑制測量噪聲的影響,并精確地檢測損傷的位置和大小。孫禹晗等[13]采用旋轉懸臂梁模型模擬旋翼直升機槳葉結構,針對位移模態,基于小波變換的奇異性分析特性,研究了一種通過小波系數輔助損傷識別的方法。計算結果表明,在旋轉結構中,位移模態結合小波變換的奇異性分析能夠實現較為準確的損傷識別效果。方有亮等[14]利用小波包樣本熵原理,研究了鋼框架結構損傷定位識別方法。通過分析框架結構受沖擊載荷時的動力響應,使用小波包分解對加速度信號進行處理,并創建小波包樣本熵的損傷指標,該指標可使用單一傳感器實現理想的識別效果,并具有適用性和魯棒性。
但上述文獻均是通過傳統測量方式獲取結構動態響應,如通過加速度計或應變傳感器測量結構的動力響應,進而達到評估結構的安全狀況或檢測損傷的目的。
在預測結構的非線性行為方面,相比于結構的加速度或速度響應,位移本身包含了更多關于動力行為的信息。常用的位移測量方法分為接觸式和非接觸式兩類,接觸式位移響應檢測方法主要包括線性可變差動變壓器百分表,拉繩式位移傳感器,線性可變差壓傳感器,磁致伸縮位移傳感器,液位計等[15-16];非接觸式位移測量有全球定位系統、激光多普勒儀、全站儀等。但上述用于測量結構位移的傳感器在實際應用中存在局限性,這種傳感器不僅安裝煩瑣、耗時、價格昂貴,還存在安裝可達性差、使用壽命以及后期維護困難等缺點[17]。
隨著科技和數字圖像處理技術的發展,基于計算機視覺的結構位移監測方法也不斷涌現出來,并在實際工程中得到廣泛運用;基于視覺的位移傳感器系統作為一種新興的非接觸式測量方法,與其他常用的接觸式位移傳感器相比,視覺傳感器具有遠距離、非接觸、高精度、省時省力、多點監測等諸多優點,因此受到越來越多的科研和工程人員的關注。Cha等[18]實現了基于運動放大技術的相位光流算法用于結構位移測量,這種非接觸式位移測量方法不需要密集的儀器,不會增加任何可能導致測量偏差的附加質量,且較傳統方法可以測量更多的信號。鄭佳艷等[19]提出了一種基于歐拉影像放大技術和邊緣灰度均值差的非接觸式測量方法,通過標定即可獲取目標結構時域中的實際位移幅值。劉輝等[20]提出多視域下基于機器視覺的索力測試新方法,解決現有非接觸視覺測量存在的測試視場不足和應用場景復雜多變的問題,該方法可以協調統一測試精度與視域范圍之間的矛盾。鄭曉昱等[21]針對目前人工測量存在的缺點,提出了一種基于激光點標定的視覺測量方法。該方法通過計算實際距離和圖像上距離之間的比例來計算每個像素點的實際尺寸,從而得到門窗洞的實際尺寸。具體步驟包括:使用兩個激光點標定距離,計算像素點對應的實際尺寸,使用圖像處理算法測量門窗洞的圖像尺寸,并計算其實際尺寸。Feng等[22]通過簡支梁結構振動測試,結果表明視覺傳感器對密集全場位移測量具有很高的精度,驗證了視覺傳感器的遠程、實時、多點測量能力。葉肖偉等[23]提出了一種基于數字圖像處理技術測量結構位移的方法,并介紹了基于模板匹配算法測量結構位移的計算過程,并對該系統分別進行實驗室和現場標定試驗來驗證該系統用于結構位移測量的可行性以及測量精度的可靠性。Dong等[24]將基于機器視覺的傳感技術與數字圖像處理算法相結合,提出了結構動態位移的多點同步測量方法。利用實測多點動態位移,采用快速傅里葉變換(fast Fourier transformation,FFT)對結構模態參數進行辨識。在工程中,通常需要對結構進行振動測試來獲得一些重要信息,如固有頻率、振型等,利用這些數據不僅可以為結構設計提供有效的依據,另外還可用于分析地震作用下結構的反應。圖像技術能夠方便、快捷、直觀準確地獲取結構的動力響應及模態參數,這是其他方法所不能比擬的。但目前基于視覺進行結構動力響應監測與模態參數識別并應用到損傷識別中的研究較少。
綜上所述,橋梁損傷識別中主要存在的問題是傳統傳感器在實際應用中存在一定的局限性,其自身附加質量會對結構的振動以及模態產生一定的影響,且傳感器的布設總數決定振型的空間分辨率,對于基于振型的小波變換的損傷識別,該方法以振型作為輸入信號,通過小波的奇異性檢測能力識別損傷,所以振型的準確與否直接關系到損傷識別的結果,由此可能導致對結構的損傷定位不準確。為解決傳統傳感器測點布設不便、數量少以及自身重量對獲取振動響應信號和模態參數的影響,提高損傷位置識別的精度及準確性,充分利用視覺傳感器多點以及非接觸監測的優點,現開發一種基于數字圖像的結構響應測量與小波變換相結合的新型損傷檢測技術。以懸臂梁為研究對象,通過數值模擬和模型實驗予以驗證,采用一種經濟的基于數字圖像的技術來獲得懸臂梁的動態位移響應以及模態參數,通過室內懸臂梁結構實驗來驗證位移響應的有效性,通過FFT變換提取結構模態參數,與數值模擬結果吻合度高。最后,基于結構振型分析通過小波分析識別損傷的發生及位置。
1 基本理論
1.1 模板匹配的原理
模板匹配算法是一種廣泛應用的模式識別方法,它歸屬于統計識別方法的范疇,通過先驗信息選擇包含目標點或者目標特征區域的圖像子集作為模板,同時確定模版在原始圖像中對應錨點的位置。將選擇的模板與序列圖像中對應的子集進行比對,并為像素單位從左至右、從上至下逐列逐行移動,每移動一個像素點以獲得模板圖像子集與序列圖像重疊部分(目標子集)的像素灰度值進行相關運算。當相關運算系數取極值時認為匹配,表示模板圖像與序列圖像的子集達到最佳匹配,最佳匹配的位置即為目標點在序列圖像中的位置。
如圖1所示,以幾何尺寸為W×H(單位pixel)的原始圖像G左上角頂點為坐標原點建立直角坐標系,從原始圖像中選取包含預設尺寸為m×n的目標模板子圖像,模板左上角頂點(簡稱錨點)位于原始圖像坐標內位置(i0,j0),則在位置(i0,j0)處的相關系數R(i0,j0)可以表示為
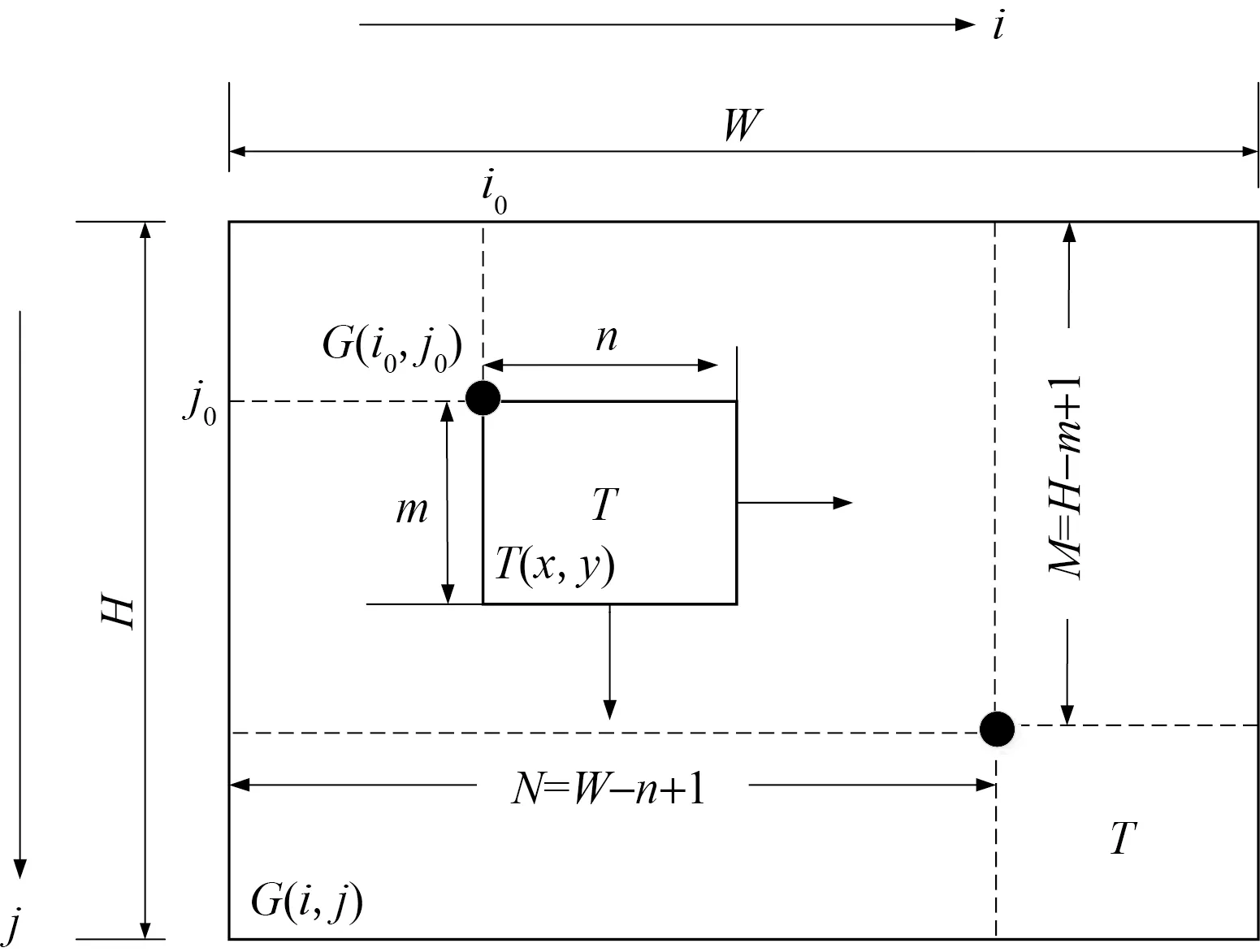
圖1 模板匹配相關匹配過程示意圖Fig.1 Schematic diagram of correlation matching process in template matching

(1)
式(1)中:x=0,1,…,m-1;y=0,1,…,n-1;i0=0,1,…,M;j0=0,1,…,N。
相關匹配過程是將搜索模板T疊放在被搜索圖G上遍歷,模板覆蓋被搜索圖的區域稱為子圖G(i0,j0),(i0,j0)為子圖錨點在被搜索圖G上的坐標。模板T逐像素遍歷并計算模板T與子圖G(i0,j0)的相關系數,模板T在被搜索圖像G的移動范圍為M=H-m+1,N=W-n+1,當模板T完全遍歷搜索圖像G并計算相關系數,最終得到一個大小為(H-m+1)×(W-n+1)的相關系數矩陣,相關系數矩陣中極小值的位置即為搜索圖像G與模板T匹配的最佳位置,即尋找的目標位置。
1.2 小波變換的基本概念
小波變換是一種積分變換,它是將一原始小波(稱母小波,也稱基本小波)進行縮放、變換,以生成后續小波(稱子小波)的過程。
設ψ(x)∈L2(R)為小波母函數,其中,L2(R)為平方可積的實數空間和能量有限的信號空間,并滿足容許性條件為
(2)
式(2)中:ψ(ω)為小波母函數ψ(t)的傅里葉變換。將基本小波ψ(t)經過伸縮和平移后可得

(3)
式(3)中:a為尺度參數,是反映某一具體基函數尺度大小(伸縮情況)的變量;b為平移參數,是反映其在x軸上平移大小的變量。
對任意信號f(x),其連續小波變換可以表示為

(4)
將小波變換的參數a、b進行離散化,并采用特殊的形式,即將尺度參數a按二進的方式離散化aj=2j,得到二進小波和二進小波變換,然后再將時間中心參數b按二進整數倍數的方式離散化,即bj=k2j,最后得其離散小波變換可以表示為

(5)
信號中的奇異點和不規則的變異成分往往含有大量信息,這是信號的重要特征之一。由于小波變換具有多分辨率時頻分析特性,因此將小波變換用來檢測信號奇異值的位置是非常有效的,如損傷或不連續性,因此可以采用小波分析輔助模態參數進行損傷識別。為放大損傷前后變化的奇異性,提高損傷識別的敏感程度,以小波系數平方差作為損傷指標,具體表示為

(6)
式(6)中:SDOWC為小波系數平方差;wψ,d為損傷后的小波系數;wψ,u為損傷前的小波系數。
2 懸臂豎梁數值模擬及驗算
2.1 懸臂豎梁的數值模擬
為了驗證模態參數小波變換方法用于損傷識別的可行性,采用一懸臂豎梁進行數值模擬,如圖2所示,其尺寸和材料參數分別為:長L=1 000 mm、寬B=40 mm、厚H=1.7 mm、密度ρ=7.85×10-9kg/mm3、彈性模量E=200 GPa、泊松比μ=0.29。通過單元剛度折減來模擬結構的非線性損傷,有利于確定損傷程度大小,損傷程度用S表示。單元為D×B×H(50 mm×40 mm×1.7 mm,D為單元長度)的長方體減小彈性模量E的值模擬單元剛度損失。如圖3所示,共設置D1~D4的4種損傷工況,其中9號單元單損傷的程度有10%、20%、40% 3種工況,多損傷工況是5號單元和16號單元兩處位置,且損傷程度均為20%。具體損傷工況如表1所示。

表1 懸臂梁的損傷工況
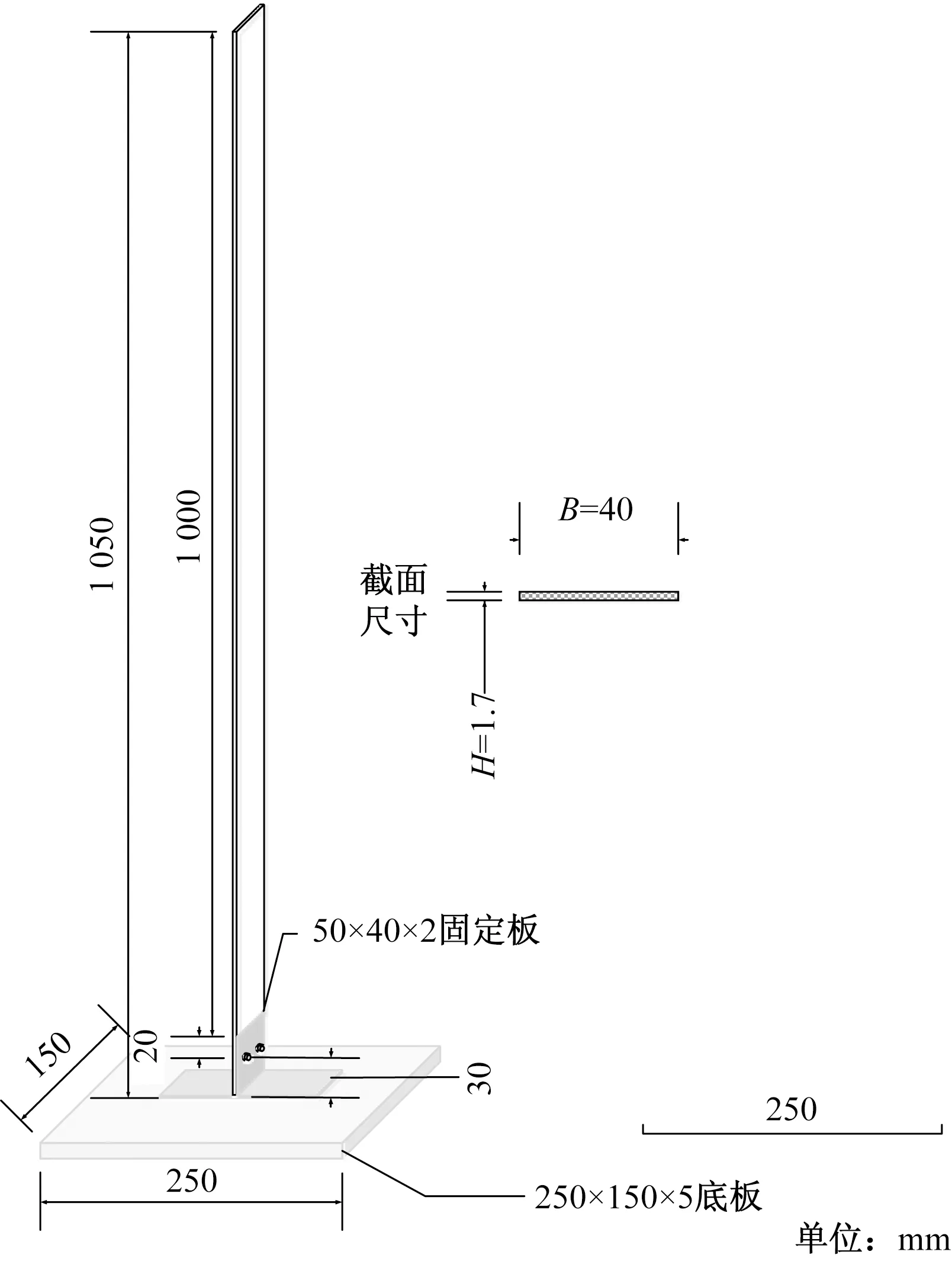
圖2 懸臂梁模型示意圖Fig.2 Schematic diagram of cantilever beam model
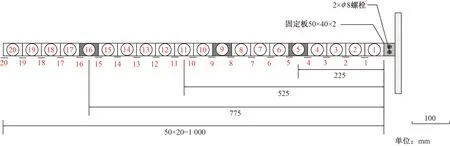
圖3 懸臂梁單元劃分Fig.3 Elements of cantilever beam
2.2 固有頻率及驗算懸臂梁模型
提取懸臂梁的前三階頻率數值模擬結果,在無損傷工況下,利用振動理論計算得到的理論值與模擬值如表2所示。前三階固有頻率的理論值與數值模擬結果的相對誤差分別為一階0.396%、二階0.349%、三階0.349%。由表2可知,兩種方法得到的結構固有頻率吻合度高,表明建立的有限元模型的正確性。懸臂梁在單損傷和多損傷工況下的固有頻率如表3所示。
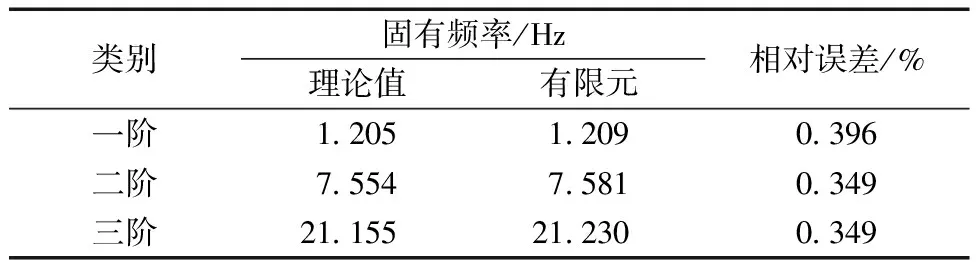
表2 懸臂梁無損時的固有頻率對比
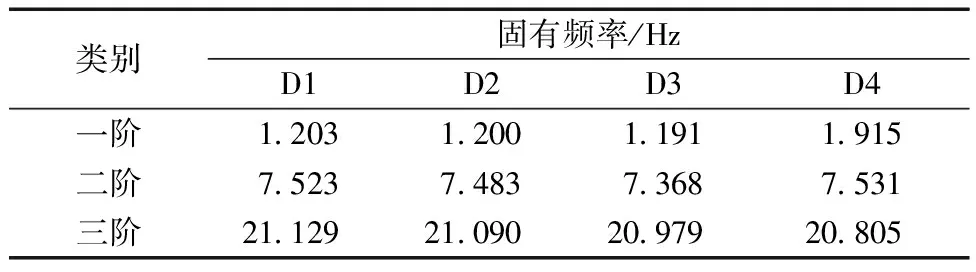
表3 懸臂梁在不同損傷工況下的固有頻率
2.3 模態參數損傷識別
單損傷采用工況1、工況2和工況3,多損傷采用工況4進行算例分析。由于低階模態可以更好地反映結構的整體動力特性,且與原始響應較為接近且平滑,同時受到噪聲干擾的影響較小,因此在實際的損傷識別工作中,如果采用某個階次的振動信號來識別結構損傷,通常建議選擇低階的振動信號,以減少損傷識別時的不確定性。因此,實際損傷識別應用中如果用某階次的振動信號來識別和定位損傷時,通常第一階次的被選用。通過數值模擬得到懸臂梁4種工況下的歸一化一階振型如圖4所示。
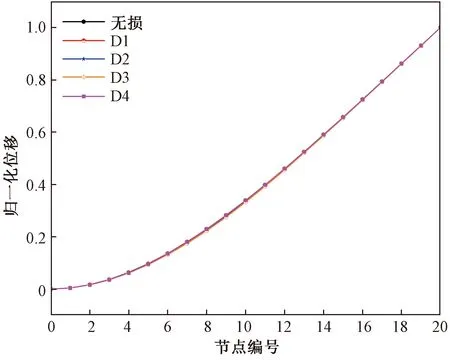
圖4 不同損傷程度下結構的位移模態Fig.4 Displacement modes of structures under different damage degrees
由位移模態分析結果可知,其在結構損傷前后的差異并不明顯,很難判斷損傷的位置,因此對位移模態進行小波分解(使用“coif1”小波基函數進行6層離散小波分解),用損傷后的小波系數平方減去損傷前的小波系數平方,得到如圖5所示的小波系數平方差。由圖5可知,結構損傷引起小波系數平方差曲線出現了顯著的異常突峰現象,可根據突峰發生位置來定位損傷。從圖5(a)可以看出,在懸臂梁單損傷D1~D3工況下均能夠清晰地通過第8節點和第9節點的突峰判定第9號單元出現損傷,其結果與模型中預設損傷位置一致。特別是在懸臂梁發生10%較小的損傷時,小波系數平方差曲線的突峰值也比較明顯,可以準確地識別出在第9號單元位置處存在損傷,且隨著損傷程度的增加,小波系數平方差也越大。由圖5(b)可知,在懸臂梁多損傷D4工況下,由小波系數平方差曲線可看出測點4與測點5、測點15與測點16有2個明顯突峰,且因破壞程度一致,所以兩處突峰大小相當。根據突峰位置,可判定在第5號單元和第16號單元的位置發生損傷。
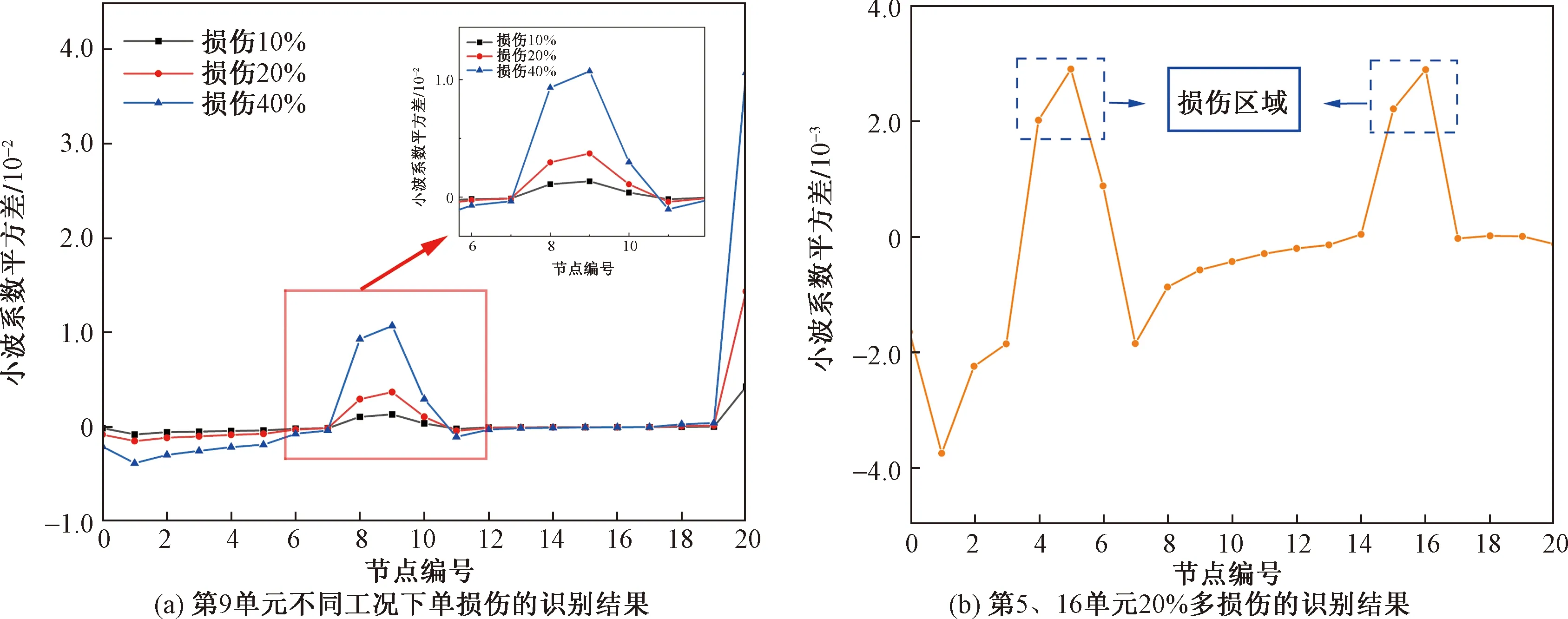
圖5 4種工況損傷識別效果Fig.5 Damage identification result of four working conditions
3 懸臂豎梁試驗驗證
3.1 試驗模型及測試方案
為進一步檢驗本文方法的可靠性,在實驗室對一懸臂豎梁開展振動試驗。懸臂豎梁模型與2.1節中數值模擬模型的幾何尺寸及物理參數相同。懸臂豎梁模型試驗布置示意圖及測點分布如圖6所示,試驗以白色A4紙為背景,用黃色標點紙在懸臂豎梁正面一側等間距布置20個測點,相鄰測點的間距為50 mm,并將測點自下而上依次編號為P1~P20,以作為機器視覺系統動態位移追蹤目標。在距離懸臂梁左側70 mm處將動態激光測距儀固定在三角支架上,并將其調至激光正對懸臂梁的9號目標測點,以獲取9號測點的振動衰減信號。在試驗中,為避免光環境對機器視覺測量的影響,在懸臂梁上下兩端分別布設了一臺LED輔助光源以保證亮度均勻。同時在距離懸臂梁正面140 mm和155 mm處分別用相機三腳支架固定工業相機和索尼相機,并調整鏡頭方向使其與懸臂梁正面正交進行拍攝。在該距離下機器視覺采集設備(工業相機、索尼相機)能夠對懸臂梁結構振動進行全域跟蹤,進而通過模板匹配法對懸臂梁的20個目標測點進行追蹤計算,以獲取結構的多點位移時程曲線。
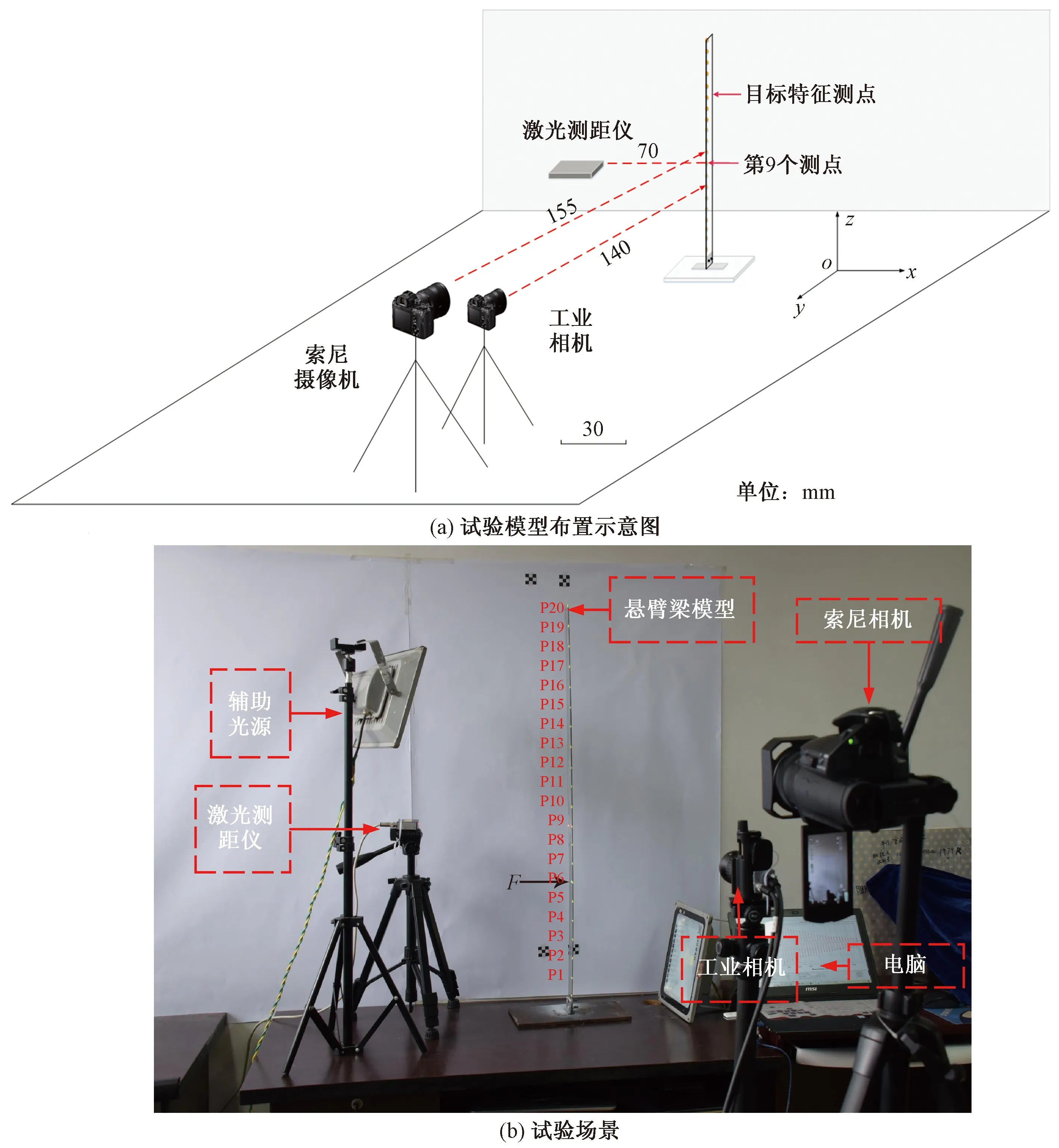
圖6 懸臂梁試驗模型Fig.6 Cantilever beam test model
試驗中,采用人工激勵方式在結構的6號測點處敲擊,使其發生自由衰減振動,通過基于機器視覺獲取的多點位移響應時程信號分析計算,提取結構位移模態。
3.2 試驗儀器
試驗中利用工業相機(a2A5328-4gmBAS)和商業相機(SONY FDR-AX40)同時采集懸臂梁的振動影像數據,并用激光測距儀(GOLTM-R603)和電腦(Msi GL62M)采集結構單點動態時程位移。其中工業相機的物面分辨率為360 pixel×460 pixel,幀率為50 幀/s;索尼相機的物面分辨率為1 080 pixel×1 920 pixel,幀率為50 幀/s;激光測距儀的采樣頻率為63 Hz。試驗儀器型號及參數詳如表4所示。
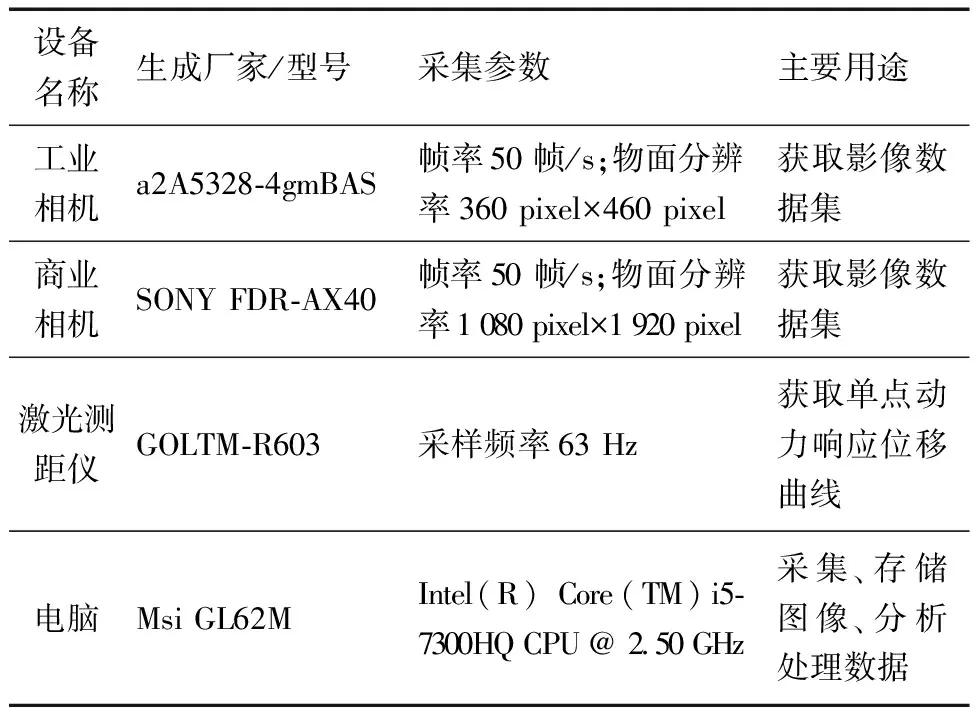
表4 試驗測試傳感器及采集設備參數
3.3 懸臂梁的損傷工況
由于裂縫深度d與截面剛度呈一次線性關系,所以實驗通過設置深度為d,寬度為b=2 mm的矩形缺口用來模擬損傷,損傷程度S用裂紋深度d與梁寬度B之比表示,即S=d/B,圖7所示為懸臂梁損傷試驗的示意圖,試驗損傷工況與2.1節相同,具體損傷工況如表5所示。
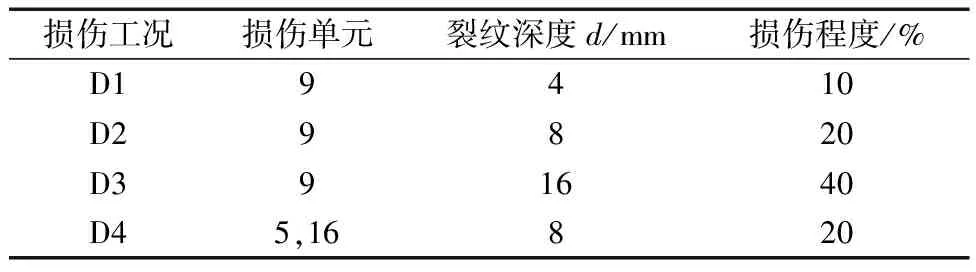
表5 實驗損傷工況
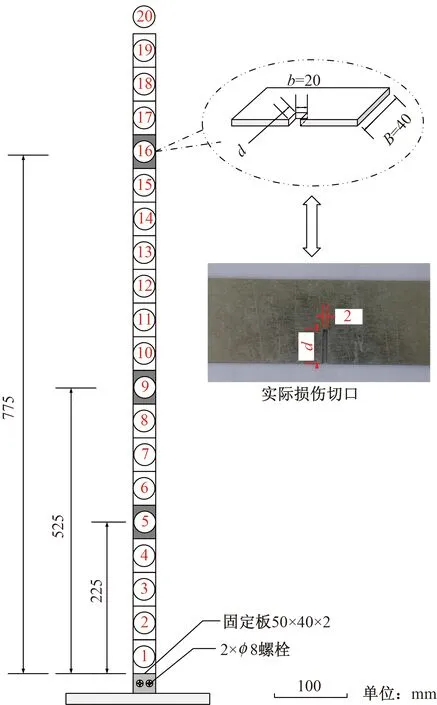
圖7 懸臂梁損傷設置Fig.7 Damage of cantilever beam
3.4 時域分析
兩種數據采集系統(基于機器視覺測量的系統和激光測距儀)記錄了懸臂豎梁的振動衰減時程。如圖8所示為基于機器視覺和通過激光測距儀獲得的無損和工況1下測點9的位移時程曲線,利用測量的數據分析了動態特性,對比研究基于機器視覺的測量系統和激光測距儀的測量精度。從圖8(a)可以看出3種儀器獲得的時域振動衰減趨勢吻合良好,但從圖8(b)和圖8(c)[圖8(b)的5~10 s放大圖]可以看出,第9號單元損傷10%的位移響應信號的激光測距儀與視覺測量前5 s內基本重合,而后5 s內的時程曲線出現了明顯偏移,這是由于激光測距儀的采樣頻率不穩定導致的,從而也進一步凸顯視覺測量采樣穩定的優勢。
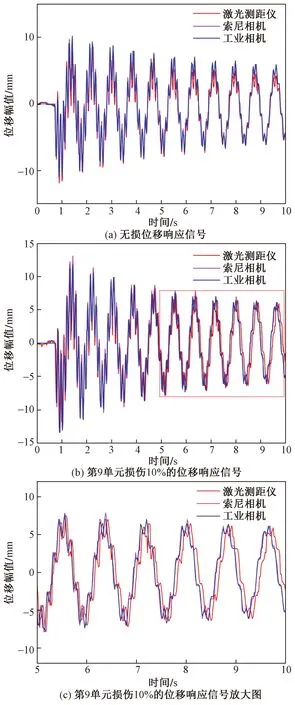
圖8 懸臂梁在無損和損傷10%時的位移時程曲線Fig.8 Displacement-time curve of cantilever beam with undamage and 10% damage
3.5 頻域分析
將無損和工況1下獲取的第九測點振動衰減曲線進行頻域分析,在頻域空間中對比研究基于機器視覺系統和激光測距儀的測量精度。由圖9可以看出,激光測距儀、索尼相機、工業相機在頻域中吻合度高。
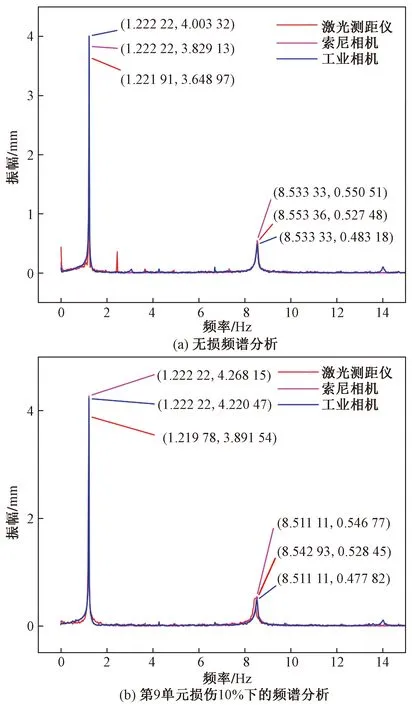
圖9 不同工況下的頻域對比分析Fig.9 Frequency domain analysis and comparison under different working conditions
對利用激光測距儀器、索尼相機和工業相機采集懸臂梁的振動信息進行頻域分析,得到其在5種工況下第9號測點的第一階和第二階頻率如表6所示。結果表明,一階固有頻率fa和fb的最大誤差均為2.202%,二階固有頻率的fa最大為3.589%、fb最大為3.182%。
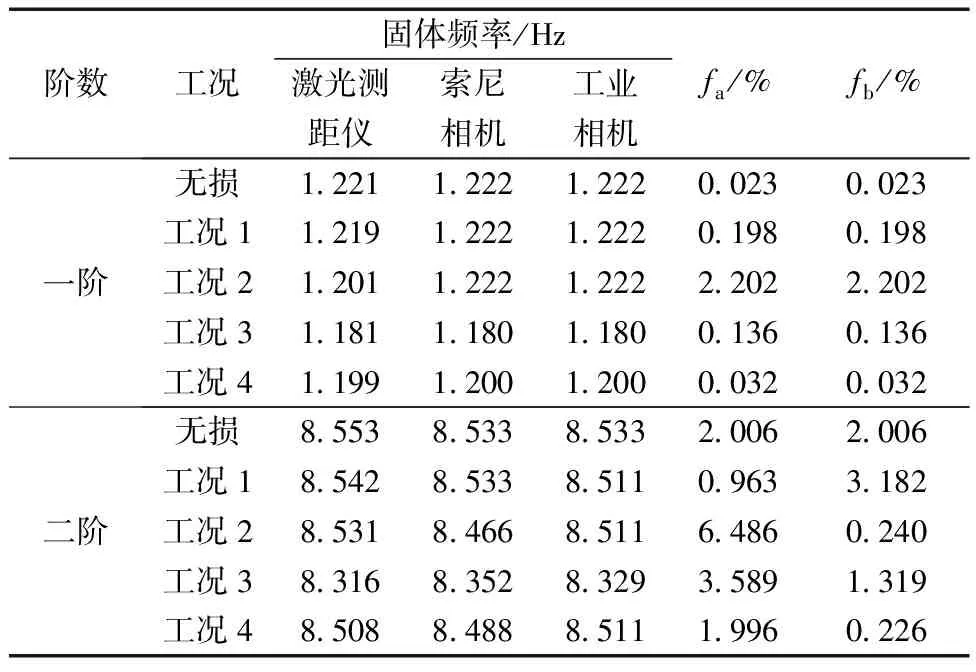
表6 不同工況下懸臂梁第9號測點前二階頻率
3.6 振型識別
傅里葉變換后的幅值譜上的峰值與結構模態是相對應的,通過拾取某測點位移信號FFT后振幅譜上的峰點,可以確定結構的各模態信息。其中幅值譜上峰值從左到右的序號代表相應的模態階次,峰值的橫坐標代表該階模態的模態頻率,縱坐標代表這個測點在該階模態振型圖上的幅值大小。振型圖上的振動方向則依靠虛部譜和相位譜進行判斷,若各個測點對應某階模態的虛部譜上縱坐標符號為正,則確定幅值譜所取峰值縱坐標在振型圖上的符號為正,反之取負。
首先將機器視覺方法獲取振動衰減信號的幅值最大值作為歸一化因子,接著,將該種測量方法的其余測點與歸一化因子相比即可求出其振型坐標。
與商業相機相比,工業相機輸出原始數據,其光譜范圍往往比較寬,更適合高質量的圖像處理算法,且圖像未經過壓縮,質量較高,更適用于機器視覺測量,有利于分析處理,因此下文將以工業相機為主要考慮對象。通過機器視覺測量方法獲得的一階振型如圖10所示。可以看出,利用模板匹配法得到的模態振型與傳統方法得到的模態振型有很高的吻合度,結果表明,非接觸式影像測量獲得的結構模態振型準確可靠。該方法為獲取橋梁結構的模態參數和結構健康監測提供了一種新的手段。
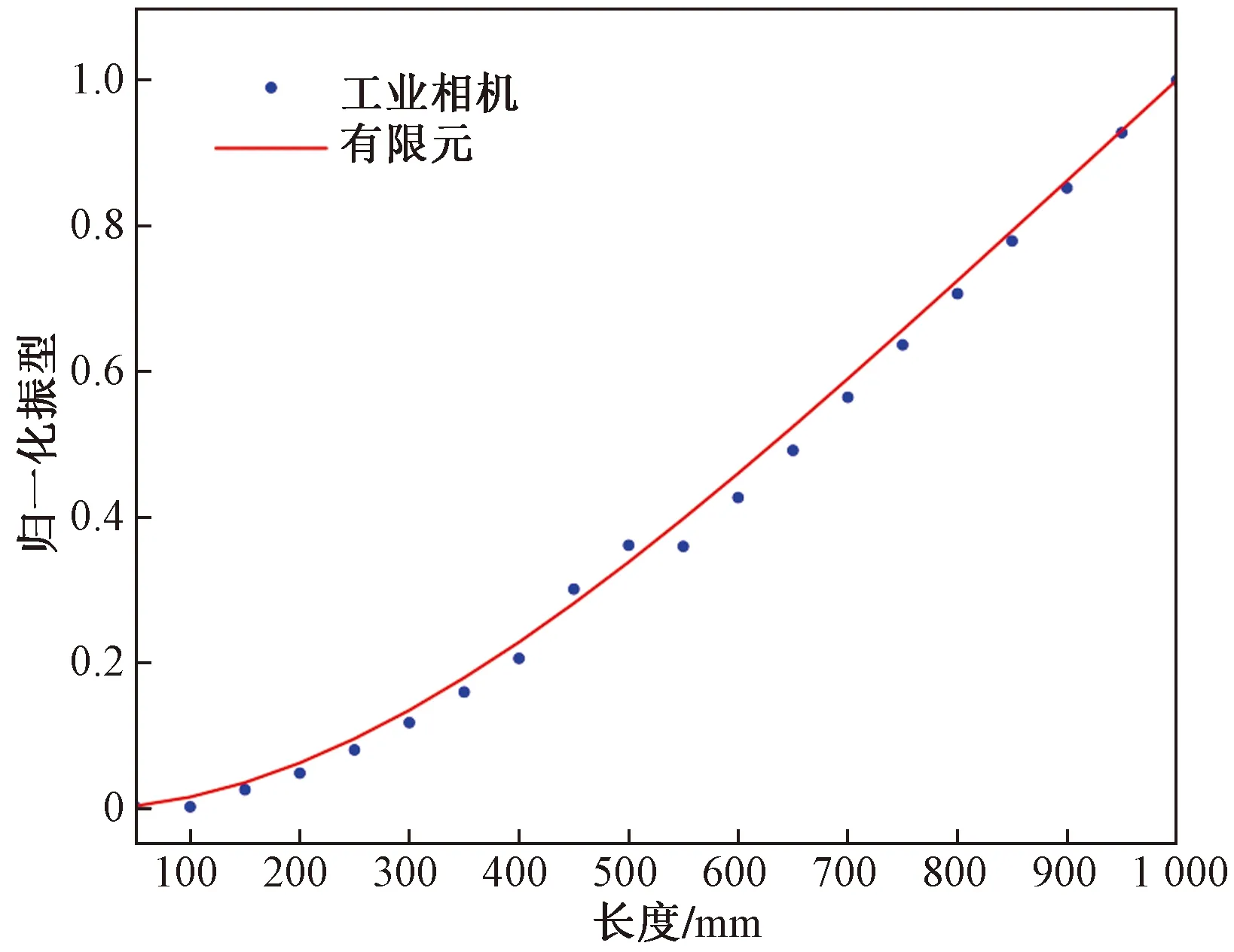
圖10 無損工況下有限元和試驗歸一化位移模態對比Fig.10 Comparison of normalized displacement modes between finite element method and experiment under undamage conditions
3.7 模態參數損傷識別
通過小波系數平方差損傷指標對懸臂豎梁模型進行損傷識別,實驗結果如圖11所示,實驗共設置4種損傷工況,小波系數平方差在D1~D3工況下產生一處突峰,在D4工況下產生兩處突峰。從圖11(a)中可以看出,小波系數平方差在節點8和節點9之間存在一處損傷,損傷發生于突峰對應的第9號單元,且隨著損傷程度的增加,小波系數平方差也越大。從圖11(b)中可以看出,小波系數平方差曲線在節點4和節點5之間,節點15和節點16之間位置處均有明顯突變峰值出現,依據損傷指標小波系數平方判定懸臂豎梁對應的第5號和16號單元均有損傷,其損傷判定結果與預設損傷位置相吻合。
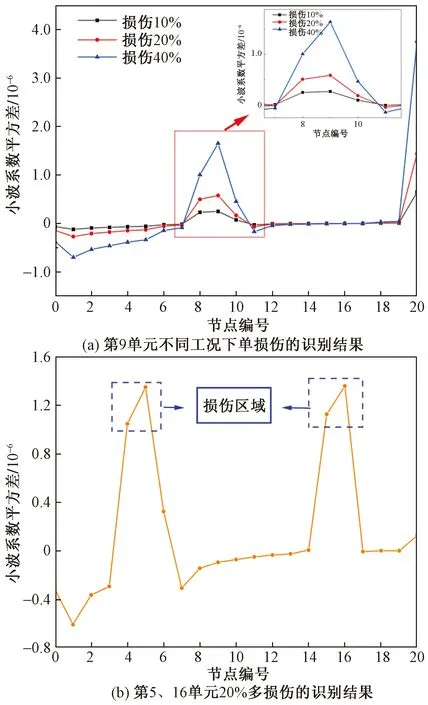
圖11 試驗各工況時損傷識別效果Fig.11 The effect of damage identification under various working conditions
此外,由于測試實驗過程中會存在儀器、噪聲以及操作上的多種不可避免的誤差來源,為了確保該方法對損傷識別結果準確可靠,在工程實際中,測試時還需要對多組數據測量計算或者降噪處理以避免判斷錯誤。
4 結論
提出了基于影像和小波變換的橋梁損傷識別新方法。該方法具有非接觸、高效快捷、可多點監測提升振型空間分辨率和準確識別及定位損傷等優點。在實驗室對懸臂豎梁振動進行機器視覺與傳統傳感器(激光測距儀)測量,并通過損傷試驗和數值模擬分析驗證了該方法對結構損傷識別的可行性和準確性,主要結論如下。
(1)圖像序列包含了豐富的數字信息,基于數字圖像處理技術能夠有效地獲取結構動力響應,通過懸臂豎梁振動敲擊實驗,分別從時域和頻域的角度驗證了該方法用于結構位移測量的可行性以及測量精度的可靠性。其中一階頻率最大誤差為2.202%,二階頻率最大誤差為3.182%;對全域測點的振動衰減信號快速傅里葉變換成功獲取了結構的模態振型,與有限元結果高度吻合。
(2)通過小波基函數對位移模態進行六層離散小波分解,根據小波系數平方差的峰值能夠精確地識別結構損傷位置,且其峰值隨著損傷程度的增加而顯著增加。
(3)在基于影像獲取結構的頻率和振型基礎上,通過位移模態的小波系數平方差可以準確地定位識別懸臂梁的單損傷和多損傷,結果與預設損傷位置高度一致,損傷因子在損傷處峰值顯著,具有良好的魯棒性。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學物理學報(2017年6期)2018-01-22 02:26:40
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44