基于多傳感器融合的自動滅火系統設計
2023-11-08 03:17:47張釗左威景江姜一博李誠任四武程濤
今日消防 2023年9期
張釗 左威 景江 姜一博 李誠 任四武 程濤
摘要:針對壓裂井場作業設備密集、易發生大規模火災的工況提出了一種基于多傳感器融合的自動消防滅火系統。介紹了不同種類傳感器的特性和功能,進行了有針對性的選擇;基于透視變換原理進行圖像型火焰探測器與雙目相機的圖像配準,使火焰探測與距離感知功能相結合,實現火焰的自動探測定位;通過對波段型火焰探測器、圖像型火焰探測器的報警信息進行綜合分析,確定多傳感器融合報警的策略,提高報警準確率、減少誤報;通過對水流落點與消防炮之間的距離以及對應消防炮的俯仰角度進行擬合,確定落點距離與俯仰角度的擬合關系用于消防炮轉向時的俯仰角度計算;進行了多次場內實地測試,測試結果顯示能夠較好地撲滅不同位置的明火,滅火效果符合設計預期。
關鍵詞:自動滅火;多傳感器融合;圖像配準
中圖分類號:X913.4? ? ? 文獻標識碼:A? ? ? ?文章編號:2096-1227(2023)09-0001-03
近年來,壓裂井場消防管理體系和技術手段不斷優化,從整體來看,井場各區域的消防水平都有了長足的進步,但依然存在很多問題,比如監控有盲區、現有滅火設施反應速度慢、滅火不精準等。因此,通過智能化技術手段實現消防滅火的自動化和智能化、大幅提升滅火效率的需求是非常迫切的。
消防炮是一種大空間的遠程消防設備,以射流形式噴射滅火劑的裝置[1]。按控制方式可分為手動消防炮、電控消防炮、液控消防炮等,隨著科學技術的發展,目前市面上出現了一種自動跟蹤定位射流滅火系統,是利用紅外線、數字圖像或其他火災探測組件對火、溫度等探測進行早期火災的自動跟蹤定位,并運用自動控制的方式來實現滅火的各種室內外固定射流滅火系統。該系統主要由探測組件、滅火組件及供液組件組成[2]。
國內外有很多學者對消防炮及相關組件進行了研究,孫靖對定流量消防水炮射流流場進行了數值模擬與軌跡研究,提出了一種基于空氣阻力的射流軌跡理論模型,對空氣阻力系數的組成進行了分析,以某種水炮進行了實驗,驗證了消防水炮射流軌跡模型和指數函數作為其系數擬合函數的正確性,但是只對噴嘴處的射流進行了數值模擬,簡化了炮身和炮頭模型[3]。陳川等設計了一種采用DSP和FPGA基于火焰識別與定位智能消防炮系統,給出了主要模塊具體的硬件電路設計和程序的設計模塊[4]。薛節著重研究了如何進行火災探測及火源定位,在火災探測方面進行了火災識別相關算法的研究,為火災探測的準確性可靠性提供了保障。在火源定位技術方面,研究了一種基于雙目視覺的火源的定位方法,根據雙目視覺的測距原理,通過視差,結合火焰質心坐標,進行三維建模,為大空間自動滅火建立了基礎,但是并沒有考慮可見光及煙霧等的影響,定位精度不高[5]。Chen等人基于一個安裝在消防炮出口端的單目CCD相機進行火焰檢測,依據消防炮轉動角度對應圖像特征在圖像中的位移關系,結合相機焦距,利用三角幾何關系對著火點進行空間定位[6]。
基于上述問題,擬設計一種自動化的滅火系統,以自動消防水炮為執行主體,結合點型多波段火焰探測器、圖像型火焰探測器、雙目攝像頭等多傳感器融合。根據火情發生的區域和火勢大小,能夠自動調節消防炮的水平角度和俯仰角度,從而實現更加快速精準地滅火,提升井場的智能化水平及消防管理能力,保障安全生產。
1 多種傳感器類型介紹
1.1? 點型火焰探測器
點型火焰探測器能夠針對不同的波長頻段進行檢測,以達到盡早發現火災隱患的目的,一般可分為單波段、紅外、雙波段紅外、三波段紅外、紅紫外復合等多種類型[7]。
1.2? 雙目攝像頭
雙目攝像頭的原理是利用左右2個攝像頭,從不同的角度采集目標圖像,通過模型構建和算法形成目標三維空間信息[8]。
1.3? 圖像型火焰探測器
圖像型火焰探測器是以CCD或CMOS攝像機為探頭,利用早期火災煙霧的圖像特征及近紅外輻射的特性來實現早期火災的預警。同時,通過對火焰特征的提取,可以輸出火焰中心點在圖像中的位置,從而能夠快速實現火災視頻采集獲取、火災分析預警等[9]。
2 設計方案
2.1? 整體布局方案
為使圖像型火焰探測器與雙目攝像機的安裝位置相對固定,設計專用工裝安裝固定一個圖像型火焰探測器與一個雙目攝像機,雙目攝像機與圖像型火焰探測器視野范圍盡可能重合,將該專用工裝分別固定到1、2位置點。
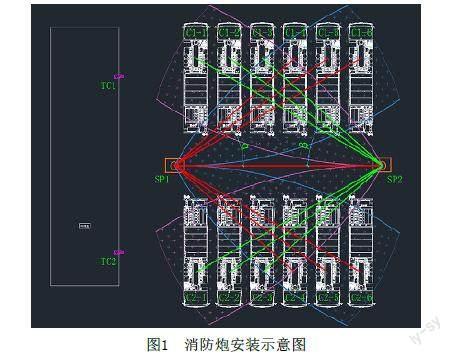
圖1為井場布局示意圖,TC1、TC2位于井場水罐上方位置,TC1、TC2處各放置一個探測定位傳感器組,本設計中探測定位傳感器組中包含一個波段火焰探測器、一個圖像型火焰探測器與一個雙目攝像機,為使探測定位傳感器組中各傳感器的安裝位置相對固定,設計專用工裝安裝固定傳感器。
消防炮安裝在井場的高低壓管匯橇上,通過供水泵為系統供水。井場中使用2個消防炮,圖1中SP1與SP2點處為消防炮1與消防炮2的安裝位置,C1-1—C1-6、C2-1—C2-6處為兩排壓裂車,消防炮覆蓋范圍可以采取遠端覆蓋與近端覆蓋2種方式,本設計采用遠端覆蓋的方式進行噴水滅火。
2.2? 多種火焰探測確定火情邏輯
使用波段火焰探測器與圖像型火焰探測器探測火焰,波段火焰探測器輸出是否存在火焰的開關量,圖像型火焰探測器輸出標識火焰的圖像。為了解決不同探測器靈敏度差異以及盡可能的消除誤報率,可能會存在以下幾種探測結果,分別采取不同的策略應對[10]:
一是2種探測器都發現火情:當波段型火焰探測器探測到火焰后發出可能發生火災的開關量,一段時間內圖像型火焰探測器探測到火焰,進一步計算火焰的空間位置坐標。
二是波段型探測器報警,圖像型探測器不報警:當波段型火焰探測器探測到火焰后發出可能有火的開關量,一段時間內圖像型火焰探測器沒有探測到火焰,則在界面系統中進行報警提醒,提醒工作人員通過監控畫面或者現場查看確定是否真實存在火情。
2.3? 多傳感器融合計算火焰的空間坐標
2.3.1? 同位置圖像型火焰探測器與雙目攝像機的圖像配準
通過圖像配準可以對不同位置的圖像型火焰探測器與雙目攝像圖像進行匹配對齊,獲得2幅圖像在空間位置的對應映射關系,圖1中同一專用工裝內的圖像型火焰探測器與雙目攝像機進行圖像配準,選擇基于特征的圖像配準方法,步驟包括特征提取、特征匹配、計算變換模型。
2.3.2? 計算著火點相對于統一坐標系的空間坐標
圖像型火焰探測器探測到火焰后,輸出火焰在探測器圖像中的像素點坐標,通過配準后的位置變換模型計算火焰點在雙目攝像機圖像中的像素點坐標,利用雙目攝像機測量得到著火點相對于該雙目攝像機坐標系的空間坐標(X',Y',Z'),基于雙目攝像機的坐標系轉換矩陣得到著火點在同一坐標系下的空間坐標(X,Y,Z) 。
2.3.3? 計算著火點相對于消防炮的空間坐標
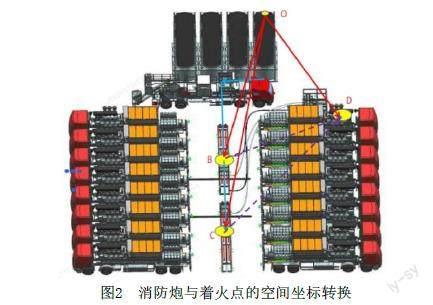
圖2中O點為攝像機統一坐標系的位置,其他位置的雙目攝像機坐標系統一到該坐標系下,B、C點處為消防炮的位置,D為雙目攝像機探測到的著火點位置,著火點在攝像機統一坐標系下的空間坐標記作(X,Y,Z),計算消防炮在攝像機中的空間坐標的方式為:深度圖、點云圖上點選2個消防炮位置,讀取2個消防炮在攝像機統一坐標系的空間坐標。
2個消防炮的空間坐標,分別記作(X1,Y1,Z1),(X2,Y2,Z2),、為著火點相對于B、C消防炮的空間坐標,,即 (X-X1,Y-Y1,Z-Z1),同理,即(X-X2,Y-Y2,Z-Z2),本設計選擇消防炮遠端覆蓋的方式,圖2中B消防炮距著火點D的距離比C消防炮距著火點D的距離遠,選擇用消防炮B對著火點D進行噴水滅火,圖2中為消防炮到著火點的空間向量。
2.3.4? 消防炮與著火點的坐標、角度轉換
設定消防炮炮筒水平、俯仰的初始角度,對消防炮到著火點的空間向量(X,Y,Z)進行向量分解得到水平、俯仰角度α、β,水平角為:
俯仰角為:
3 全系統聯合測試
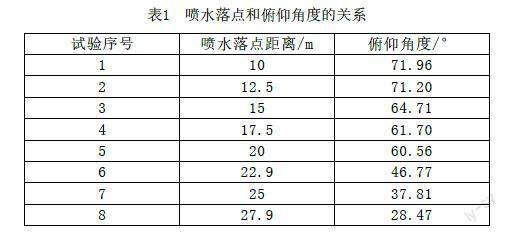
為了擬合出水炮的俯仰角與噴水落點距離關系的關系式,在測試環境下進行多項數據標定測試,經過多次試驗測試,選出一組較符合實際情況的數據,如表1所示。
經過實際測試對比分析,發現二次擬合曲線與實際情況最符合,因此采用二次方程擬合。
4 結論
本設計提出了基于多傳感器融合的自動滅火技術,通過多傳感器融合實現火源的自動識別和定位,控制系統將計算后的旋轉角度下發給消防炮,消防炮通過自身的運動部件完成轉向滅火,實現了消防炮滅火的自動化與智能化。
①基于透視變換原理進行圖像型火焰探測器與雙目相機的圖像配準,使火焰探測與距離感知功能相結合,實現火焰自動探測定位。
②通過對波段型火焰探測器、圖像型火焰探測器的報警信息進行綜合分析,確定多傳感器融合報警的策略,提高報警準確率、減少誤報。
③通過對消防炮水流落點與消防炮之間的距離以及對應消防炮的俯仰角度進行擬合,確定落點距離與俯仰角度的擬合關系用于消防炮轉向時的俯仰角度計算。
通過理論計算分析與實際聯調測試,證明了本方案是切實可行且具有較好自動滅火效果的。本方案能夠改善壓裂井場安全現狀,提升井場消防滅火的安全保障能力,保護井場作業人員的安全性。接下來,需要進一步完善算法的可靠性及穩定性,持續進行系統的功能優化和性能提升,以滿足產品大規模市場推廣的要求。
參考文獻:
[1]程宏偉,劉德明,黃文忠.淺析消防炮滅火系統的應用[J].福建建設科技,2011(1):5-7.
[2]齊欣,楊丙杰,楊琦.自動跟蹤定位射流滅火系統應用技術分析[J].消防科學與技術,2022,41(7):951-953.
[3]孫靖.定流量消防水炮射流流場數值模擬與軌跡研究[D].秦皇島:燕山大學,2018.
[4]陳川,鄧成中,武昕坤,等.基于火焰識別與定位的智能消防炮系統設計[J].消防科學與術,2015,34(9):1207-1209.
[5]薛節.圖像型火災探測及火源定位系統的研究與實現[D].上海:東華大學,2015.
[6]Chen T,Yuan H Y,Su G F,et al.An automatic fire searching and suppression system for large spaces[J].Fire Safety Journal,
2015,39(4):297-307.
[7]畢振波,樂天,潘洪軍,等.圖像型火災探測預處理方法綜述[J].消防科學與技術,2016,35(1):87-91.
[8]丁國紳,喬延利,易維寧,等.基于光譜圖像空間的改進SIFT特征提取與匹配[J].北京理工大學學報,2022,42(2):192-199.
[9]周正平.自動跟蹤定位射流消防炮系統設計[D].西安:西安電子科技大學,2015.
[10]龍勇志.紅外與可見光圖像配準與融合算法研究[D].成都:電子科技大學,2020.
Design of automatic fire extinguishing system based on multi-sensor fusion
Zhang Zhao1, Zuo Wei1, Jing Jiang1, Jiang Yibo2, Li Cheng2, Ren Siwu1, Cheng Tao1
(1. Downhole Operation Company of China National Petroleum Corporation Western Drilling Engineering Co., Ltd., Xinjiang Karamay 834000;
2. Yantai Jereh Petroleum Equipment Technology Co., Ltd., Shandong Yantai 264000)
Abstract: An automatic fire extinguishing system based on multi-sensor fusion is proposed for the working conditions of intensive fracturing well site equipment and prone to large-scale fires. The characteristics and functions of different types of sensors are introduced, and targeted selections are made. Based on the principle of perspective transformation, the image registration between the image flame detector and the binocular camera is carried out, and the flame detection and distance sensing functions are combined to realize the automatic detection and positioning of the flame. Through the comprehensive analysis of the alarm information of the band flame detector and the image flame detector, the multi-sensor fusion alarm strategy is determined to improve the alert accuracy and reduce false alarms. By fitting the distance between the water drop point and the fire gun and the pitch angle of the corresponding fire gun, the fitting relationship between the drop point distance and the pitch angle is determined for the calculation of the pitch angle when the fire gun is turned. A number of field tests were carried out, and the test results showed that the open flames at different locations could be well extinguished, and the fire extinguishing effect was in line with the design expectations.
Keywords: automatic fire extinguishing; multi-sensor fusion; image registration