基于雙軌探傷車的多功能組合搬運車設計與實現*
2023-11-13 08:35:38丁旭升陳榮昭陳坤裕
機電工程技術 2023年10期
丁旭升,陳榮昭,陳坤裕
(廣東汕頭超聲電子股份有限公司超聲儀器分公司,廣東汕頭 515041)
0 引言
目前,國內自主研制的雙軌式鋼軌超聲波電動探傷車,具有優秀的缺陷檢測能力和精度,車子行駛穩定性高,拆裝方便快捷,適應43~75 kg/m多種軌型,能對高鐵、地鐵和普鐵等在役鋼軌線路進行全方位檢測鋼軌內部缺陷[1]。現有的雙軌式鋼軌超聲波電動探傷車均采用可快速拆裝分體式設計。由探傷工將車體、前橋和后橋分拆后,進行分開搬運。從高鐵站、地鐵站的入口到鋼軌線路,路途曲折,關口狹窄,樓梯多變,通常需要4人同時協力進行平放搬運;當途經多層樓房之間的電梯門時,因這種探傷車的車體寬度大于電梯門的寬度(一般只有1.1 m),無法平放搬入電梯門內,需車體倒立側身出入,再加上其整體質量仍十分笨重,耗時耗力,相當不方便。到達待檢測的鋼軌線路后,仍需手動搬放到鐵軌上并快速組裝。探傷作業完成后,還得把雙軌式鋼軌超聲波電動探傷車就地快速分拆,從鋼軌線路搬運到高鐵站、地鐵站的入口,再用卡車運走。勞動強度大,易疲勞,對探傷工的體能要求很高,大大增加了工作時間和人力資源。有限的天窗時間,低下的工作效率,極易影響工作進度[2]。
現有市面搬運小車能在機動車輛不便使用的地方、狹小空間、短距離搬運較輕的物品時十分方便[3-5];電動搬運車能在寬廣空間、長距離搬運較重物品時有著安全省力、搬運效率高等特點,能滿足企業大部分作業場景的需求[6-8]。但還沒有一款搬運車能夠快速把笨重車體輕松倒立側移進電梯進行搬運。為此,本文提出一種用于探傷車的多功能組合搬運車,僅需2 人就能夠進行平放或倒立推移車體,減少勞力,省力且安全,提高搬運效率,便于人工搬運。
1 設計原理
搬運車采用平板車與手推車相結合設計,首要用于搬運EGT-60 型雙軌式鋼軌超聲波探傷儀的車體,或是直接用于搬運隨車配附件(諸如:水桶、驅動電池、儀器電池、儀器主機和顯示器等),提起、翻轉、移動、爬梯都是依托人力來完成。其作業原理如下。
(1)在提起車體時,是起了杠桿作用。如圖1所示,支點在輪子的軸心,動力是人施的力F,阻力是總重力G。由力的作用線到支點的距離叫做力臂,動力臂L1,阻力臂L2。根據公式F·L1=G·L2可得力臂越長力就越小。由于L1>L2,可得F <G,所以是省力杠桿。
(2)同理可推導出在翻轉車體時也是省力的,如圖2 所示。
(3)在倒立移動車體過程中,搬運車是平動的,如圖3 所示,把滑動摩擦變成滾動摩擦,不起杠桿作用。
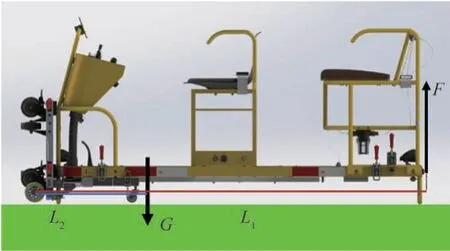
圖1 省力杠桿原理
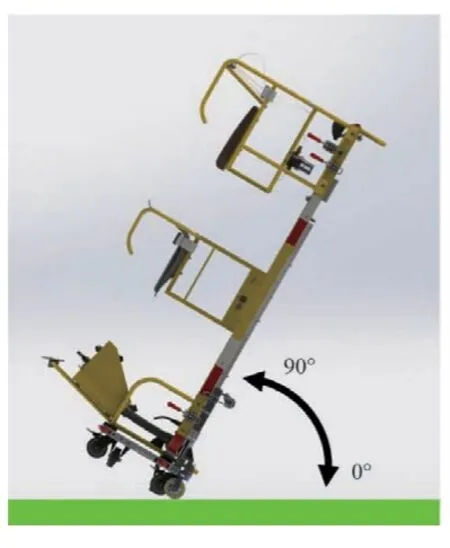
圖2 車體翻轉
(4)搬運車體爬樓梯時,搬運車的轉腿輪可替換成3 輪(或3 輪以上)的輪輻。在結構空間允許條件下,輪數越多,爬行越平穩。如選用5 輪(五角星形的輪輻端頭均裝有一只小輪子)上下樓時,輪輻上的5 對輪子的輻條輪流著地。由于采用了5 對輪子,每對輪子的間隔為72°,上樓時,前一對輪子的輻條達到垂直位置前,即重心還未穩,下一對輪子已經接觸到上一個階梯,因而上下樓時不產生沖擊和跳躍現象,猶如走平地一樣平穩。對于不同高度及陡度的階梯,只需調整輻條長度就能達到同樣平穩的走行效果[9-10]。一人在車體頭部推,另一人在車體尾部拉,即可實現爬梯。
2 硬件組成
多功能組合搬運車由搬運車和移動架構成,這兩個組件可以獨立使用,也可以組合使用。可以平放移動,也可以倒立移動,一車兩用,兩種使用狀態,可根據需要選擇。
2.1 搬運車

圖3 車體倒立
搬運車主要由伸縮車板、抓臂、轉腿和抓扣等構成。能輕松折疊,瞬間變小身材,如圖4~5 所示,方便包裝運輸。
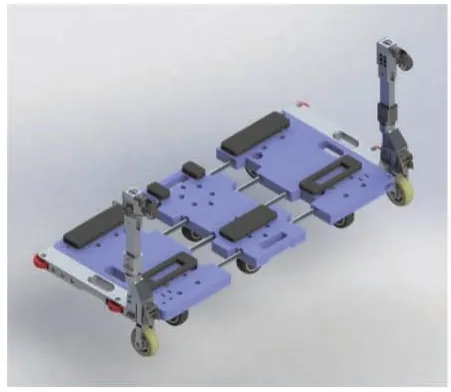
圖4 搬運車全展開狀態
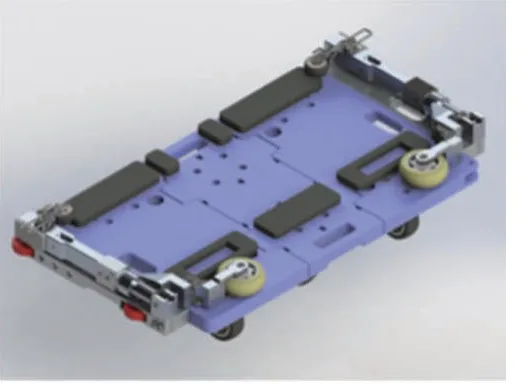
圖5 搬運車全收縮狀態
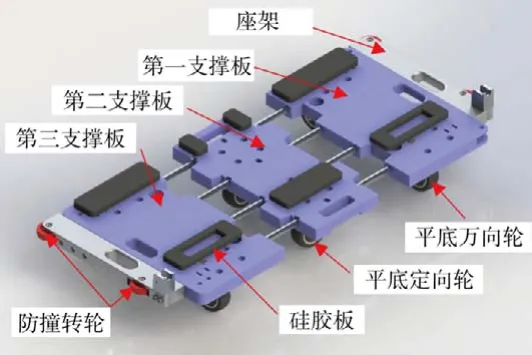
圖6 伸縮車板
2.1.1 伸縮車板
伸縮車板是由現成外購可伸縮搬運車改造而成,去掉原配的扶手,然后兩側加裝座架,如圖6 所示。伸縮車板包括相互對接的第一支撐板、第二支撐板和第三支撐板,它們可沿車板長邊方向、或寬邊方向相對伸縮移動并在極限位置自鎖,從而可以根據具體情況擴大或縮小承載面積,可適用于不同場合[11]。第一支撐板和第二支撐板底下各裝有2 個平底萬向輪,中間第二支撐板底下裝有2 個平底定向輪。支撐板上還粘貼有防撞硅膠板來保護雙軌車頭。每側座架設有2 個防撞轉輪,既可以在搬運車平移時防撞,也可以在搬運車豎移時作為腳輪,方便運輸。
2.1.2 抓臂
抓臂由支撐桿、定凸輪、導向管、扭簧和限位套組成。左右兩個抓臂分別安裝在伸縮車板兩側支撐板的支座上,繞著支座上的固定軸,可以實現0°~90°的可收縮動作,如圖7 所示。
2.1.3 轉腿
轉腿主要由轉柱、動凸輪、大平墊、折疊鉸、輪架和靜音腳輪等組成。通過折疊鉸,能實現0°立腿(圖8)和90°抬腿(圖9),并帶自鎖的兩個動作。緊固在抓臂上的扭簧連接轉腿動凸輪,當抓臂收縮或是伸展時,扭動動凸輪,使轉腿圍繞抓臂的導向管同步實現0°~90°的收縮或是伸展,并帶自鎖的兩個動作。
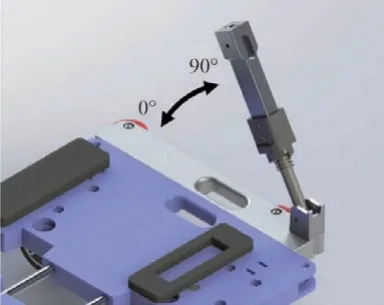
圖7 抓臂
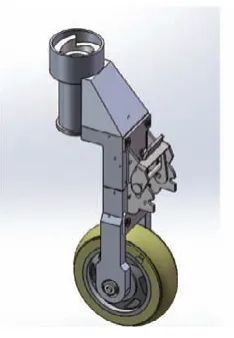
圖8 立腿
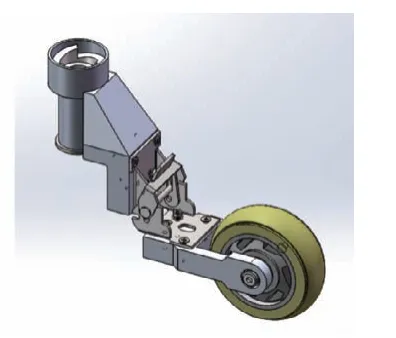
圖9 抬腿
2.1.4 抓扣
抓扣主要由拉桿、快速搭扣(帶自鎖)、快卸銷、絲桿靜音萬向腳輪和硅膠板等組成,如圖10 所示。抓扣為可拆卸,可每間隔90°旋轉鎖緊設計。按住快卸銷的按鈕,把抓扣插入到抓臂的限位套上,松開快卸銷的按鈕,抓扣就緊固在抓臂上。抓臂咬住抓扣后,可以通過抓扣的快速搭扣把車體緊固在搬運車上。

圖10 抓扣

圖11 移動架
2.2 移動架
移動架主要由1 個支撐架、2 個包膠滾筒、2 只絲桿萬向腳輪和2 只絲桿剎車腳輪等組成,用于搬運雙軌車的前橋和后橋,每條橋配備2 個搬運架(圖11)。
3 控制系統
3.1 搬運車的控制
走平地或是進電梯,需要車體倒立搬運,如圖3 所示。搬運車裝載車體并移動到目的地,可參照從(1)→(4)控制步驟操作;當卸下車體時,可反向按(3)→(1)控制步驟操作即可。
(1)車體平放于地面上,搬運車倒立從車頭插入車體,如圖12 所示。

圖12 插入車體
(2)搬運車緊貼車頭后,車體兩側扣上自鎖搭扣(圖1),把車體與搬運車鎖緊。
(3)把搬運車底下的萬向剎車腳輪剎住。兩人在車體尾端用力抬起車體,讓車體以搬運車的轉腿輪為支點翻轉(圖2),最后倒立平放于地面(圖3)。
(4)由于搬運車底下前后各2 個萬向剎車腳輪和中間2 個定向腳輪著地,所以沿著車板長邊方向可采用前拉后推的控制方式。車體哪側在前,哪側在后,由用戶喜好而定。手推車體側面(類似扶手),很輕松就移動到目的地。
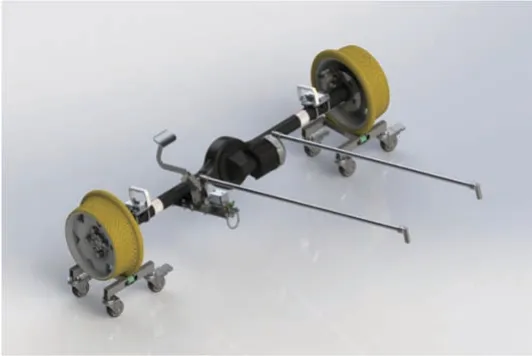
圖13 移動架工作狀態
3.2 移動架的控制
把移動架放置于走行輪下面,讓凸輪緣置于限位槽里,并處于包膠滾筒上(圖13),再用繩子把走行輪和移動架綁住,防止走行輪因激烈跳動而脫離移動架。雙手推著限位桿帶動前橋(或是后橋)移動到目的地。若需要停放有坡度地面時,剎車腳輪需剎車,防止溜坡。
3.3 組合車的控制
搬運車體上比較陡的坡度時,為安全起見,可以降低重心選擇“1 輛搬運車+2 個移動架”的組合方式。組合搬運車裝載車體并移動到目的地,可參照從(1)→(5)控制步驟操作。
(1)車體平放于地面上,搬運車倒立從車頭插入車體,見圖12。
(2)搬運車緊貼車頭后,車體兩側扣上自鎖搭扣,把車體與搬運車鎖緊。
(3)抬高車體前端,再按住轉腿上折疊鉸的按扣把折疊鉸從展開狀態轉變為折疊狀態,讓轉腿蹬高,如圖9和圖14 所示,即轉腿狀態從立腿轉為抬腿,再下放車體前端著地。

圖14 組合搬運車蹬高動作
(4)抬高車體尾端,把兩個搬運架放置于車體下面,讓車體后端支腳置于限位槽里,并處于包膠滾筒上(圖15),再用繩子把支腳和搬運架綁住,防止支腳因激烈跳動而脫離搬運架。
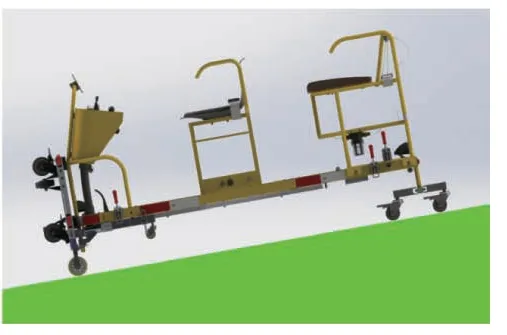
圖16 組合搬運車爬坡狀態
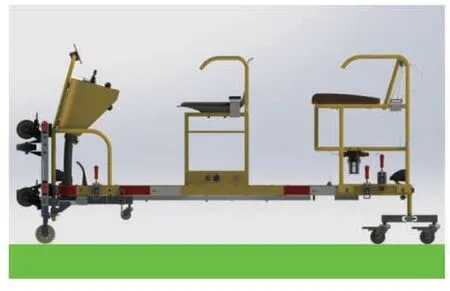
圖15 組合搬運車平動狀態
(5)由于搬運車左右兩側的轉腿定向腳輪著地,搬運架所有萬向腳輪著地,所以適合推車頭拉車尾的控制方式搬運。即手推車體前端或是手拉車體后端在平地移動或是爬坡(圖16)到目的地。
4 測試驗證與結果分析
組合搬運車的樣車研制出來后,搬運車和移動架的參數分別見表1 和表2,并完成了出廠測試。測試是以在廠區內搬運EGT-60 型雙軌式鋼軌超聲波探傷儀的車體進行各種試驗為主。
(1)提起、翻轉測驗。由2 人按照前文3.1 節步驟(1)→(3)操作,實現將車體提起、翻轉,耗時20 s。隨之熟練程度增加,耗時持續縮短。
(2)平穩性測試。1 人手拉車體側面在前,另1 人手推車體側面在后,進行各種復雜地形移動測試。不管途徑平路還是泥路、坡路,推拉起來都很省力輕松,車體不搖晃。
(3)狹小空間搬運測試。電梯空間為長1.5 m ×寬1.1 m×高2.1 m,車體倒立搬運的空間為長1.2 m ×寬0.92 m ×高2 m,很輕松就進入電梯里,上下樓層很方便。
(4)組合車搬運測試。由2 人按照前文3.3 節步驟(1)→(4)操作,耗時25 s。不但平地移動車體很穩,就是途徑比較陡的坡度時,車體重心也非常穩。
試驗結果表明該車各方面性能完全滿足預期設計要求。

表1 搬運車參數

表2 移動架參數
5 結束語
本文通過對省力杠桿的運用,集合可伸縮平板車與可折疊手推車的功能特點,設計出一種適應于雙軌探傷車的多功能組合搬運車,解決了雙軌式鋼軌超聲波電動探傷車從站口到鋼軌線路之間的往返路途人工搬運難題。實際測試表明,該組合車能夠在復雜的地形穩定運行,可以平放移動,也可以倒立移動,還可以輕松折疊,省力且安全,大大提高搬運效率,并具有低成本和易操作等特點,這也對傳統搬運車升級改造具有一定的實用和推廣價值。但是,本代產品在輕質化、多用途上有待提升。下一步,將不斷改進優化,力求精益求精,盡最大努力滿足用戶個性化需求,同時盡可能降低成本,保持核心競爭力。