基于新型跟蹤微分器的磁浮車懸浮控制算法研究
2023-11-13 07:58:06張文進林志堅張睿揚龍志強顧秋明張和洪
鐵道科學與工程學報 2023年10期
張文進,林志堅,張睿揚,龍志強,顧秋明,張和洪
(1.福州大學 物理與信息工程學院,福建 福州 350000;2.南京理工大學 機械工程學院,江蘇 南京 210094;3.國防科技大學 智能科學學院,湖南 長沙 410073;4.樂嘉建設工程有限公司,福建 福州 350000;5.福州大學 計算機與大數據學院/軟件學院,福建 福州 350000)
磁浮列車作為一種新型軌道交通工具,改變了傳統鐵路的輪軌接觸支承與驅動的方式,通過電磁力使車輛懸浮并驅動列車前進,它與傳統輪軌列車系統相比,具有噪聲低、摩擦損耗小、維護成本低和爬坡能力強等優勢,是一種具有良好發展前景的交通工具[1]。磁懸浮技術發源于德國,之后中國、日本、韓國和加拿大等國家也相繼開展了磁懸浮軌道交通技術的研發工作,而中國在此方面發展較快,已從試驗研究階段向試驗運行、商業化運行模式轉變,目前已有的中低速磁懸浮運營線有北京磁浮S1線和長沙磁浮線[2]。懸浮控制技術是磁浮列車的關鍵和核心技術之一,懸浮控制系統性能的好壞直接影響磁浮列車的穩定性、安全性和舒適性[3]。其中,PID 控制算法由于設計簡單、魯棒性強、調節方便等特點常被用于磁浮車控制中[4-5]。然而,磁浮列車間隙傳感器中常常存在隨機噪聲,PID 控制器的微分環節是直接采用數值差分法[6]對間隙信號提取相應的速度信號,這會引起噪聲放大效應,進而導致懸浮不穩甚至導致列車與軌道吸死等狀況。為了解決這一問題,研究人員提出了許多不同的微分器設計方法來對含噪聲信號進行合理的濾波與微分提取,包括線性時間微分跟蹤器[7]、基于高增益觀測器[8]、精確魯棒微分器[9-10],有限時間收斂微分器[11]等。其中HAN[12]提出了跟蹤微分器的概念,其不但能從帶隨機噪聲的輸入信號中有效跟蹤原始信號,還能合理地提取微分信號。韓京清等[13-14]對文獻[12]中的fhan-TD 的頻域特性以及收斂性進行分析,證明了該跟蹤微分器在信號跟蹤濾波以及微分獲取方面具有良好效果。現階段針對跟蹤微分器的研究與設計被應用到不同領域中,LIU 等[15-16]分別設計了自適應跟蹤微分器及高精度跟蹤微分器,并在機電系統和磁浮車信號檢測系統中得到驗證。張文躍等[17-18]分別設計了NHS-TD 與THAN-TD,在消除磁浮車懸浮傳感器過軌道接縫的信號畸變上取得良好效果。跟蹤微分器算法中,控制綜合函數的形式與特點對濾波特性、跟蹤相位滯后、微分信號估計準確度方面起決定性作用,因此如何設計恰當的控制綜合函數被作為重點研究內容。韓京清等[19]通過狀態反步法給出了跟蹤微分器控制綜合函數的一般形式,但是函數中包含非線性的根號運算,在離散化的數字控制系統中計算量大,對于控制算法具有一定的復雜性。針對此問題,謝云德等[20-21]通過尋找最速控制取非極值的線性區邊界特征點,構造了簡單的線性函數,避開了復雜的根號運算,提出了易于實現的FTD,但是該TD 參數較多,整定較為繁瑣。ZHANG 等[22]根據初始點位置選取相應控制量,推導出對應的邊界曲線以及特征曲線,采用線性化準則,提出結構簡單的跟蹤微分器,并驗證了該TD 具有良好的微分及跟蹤性能,但并沒有給出具體的TD 表達式,對于工程實現具有一定的復雜度。本文將從控制綜合函數入手,提出一種新型簡易離散跟蹤微分器,用狀態反步法確定最速離散二階系統的線性區域邊界曲線以及控制特征曲線,并確定可達區與線性區的控制量,構造出統一的邊界曲線表達式,不依賴邊界的變換,使得控制綜合函數形式簡化,給出新型TD 的具體表達式。所提出的簡易跟蹤微分器算法中不含非線性運算,適用范圍更加廣泛。通過仿真和試驗驗證了所提跟蹤微分器的良好特性,為工程實現提供了一種行之有效的方法。
1 磁浮車懸浮控制系統
1.1 懸浮系統模型建立
磁浮列車懸浮控制單元由相應的軌道和電磁鐵組成,通過實時控制電磁鐵線圈的電流來提供平衡系統重力的電磁力以保證一定的懸浮間隙。其中,懸浮控制系統基本原理如圖1所示,其物理機理模型是以磁浮車動力學方程和電學、力學關聯方程為基礎建立起來的。由電磁理論可知,通電電磁鐵線圈繞組能夠產生方向豎直向上,大小隨電流變化而變化的電磁吸力,磁浮車依靠電磁吸力以設定間隙懸浮于軌道之上。如圖1所示,磁浮車體單個轉向架包含4個懸浮控制單元,各點呈90 度角分布,系統借助空氣彈簧實現機械解耦進而使得4個懸浮單元之間相互獨立,故單點懸浮控制系統可作為磁懸浮系統的基本單元,分析其動態模型及特性具有一般性。
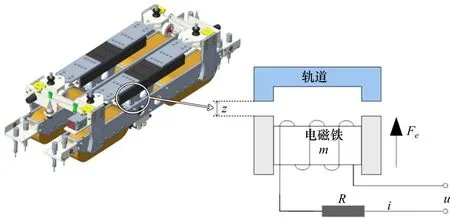
圖1 磁浮車懸浮系統結構圖Fig.1 Structure diagram of the maglev suspension system
如圖1所示,以向下為正方向,電磁鐵的動力學方程為:
=mg-Fe,磁力Fe為:
其中:μ0表示真空磁導率;N表示電磁鐵線圈的匝數;A表示電磁線圈的有效極面積。由式(1)可知電磁力Fe與間隙z是非線性的反比關系,表明懸浮系統是一個非線性不穩定系統。
電磁鐵電壓電流方程:
其中:L為電磁鐵線圈等效電感,電感的等效表達式為,代入(3)式可得:
合并式(2)與式(4)得到單點懸浮系統模型:
由于控制系統的設計是針對線性化以后的系統,故只考慮電磁鐵在平衡后附近的特性,在電磁鐵運動的小范圍內,設電感為常量,根據式(5)創建3階狀態空間方程:
其中:y為懸浮系統懸浮間隙的導數。通過采用快速電流環技術,將電磁鐵兩端的電流電壓關系等效為比例關系:u=iRk,Rk是電流環校正后的等效電阻。將比例系數代入式(6)可降階為一個2 階系統:
上式中:x1為間隙位置信號,x2為位置微分即速度信號。容易證明,該2階系統是能控系統,為之后設計反饋控制器打下基礎。根據磁浮列車數學模型,懸浮控制系統參數如表1所示。
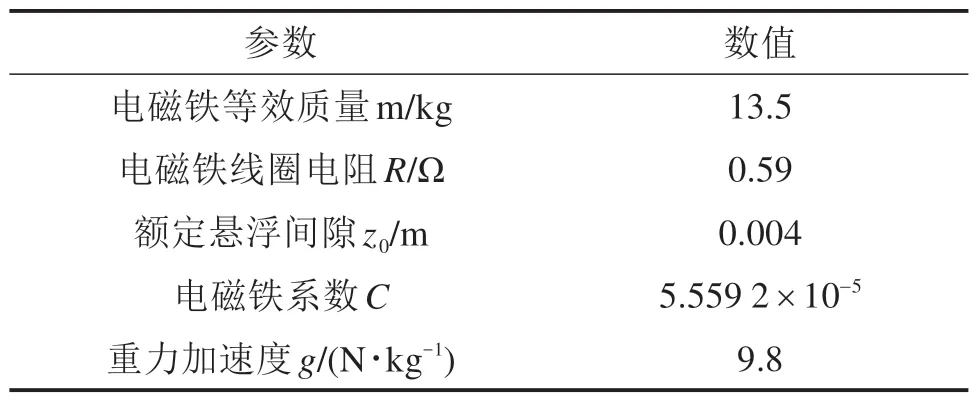
表1 磁浮車系統參數Table 1 System parameters of the maglev train
1.2 磁浮車懸浮系統控制器
本文采取當前相對成熟且工程界廣泛應用的PID 算法用作懸浮系統控制器,其設計簡單,魯棒性強。PID 中的微分環節若使用數值差分法只能近似得到間隙信號的微分信號且極易造成噪聲放大問題。經過真車實際運行工況得知輸出間隙通道噪聲強度在65~75 dB 之間,受到噪聲影響會使相關的懸浮點上下抖動甚至吸附在軌道上,而在間隙輸出端加入跟蹤微分器能夠對帶噪聲信號進行有效的跟蹤濾波,進而反饋回懸浮系統控制器,控制磁浮車穩定懸浮。
在輸出間隙通道加入跟蹤微分器之后,懸浮系統的反饋控制器結構如圖2 所示,v0為輸入設定間隙信號,yout為系統輸出間隙信號,x1為跟蹤濾波信號,其與v0之差記作誤差信號e1,為間隙誤差的微分信號,為間隙誤差積分信號,η為系統中的量測噪聲。控制量由PID控制器輸出,作用到由電流環與位置環組成的被控對象中,最終表現為懸浮系統輸出間隙信號。其中設計有效的跟蹤微分器算法對間隙傳感器輸出信號進行處理是構造磁浮列車懸浮反饋控制器結構的核心與關鍵。
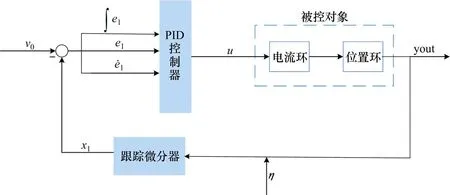
圖2 磁浮車單點懸浮控制框圖Fig.2 Single point suspension control block diagram of the maglev train
2 新型跟蹤微分器設計
韓京清跟蹤微分器離散形式[23](即fhan-TD)中含有根號運算,增加了運算復雜度,不利于系統實現;此外,實際系統中一般是數字控制系統,需采用離散化的形式,跟蹤微分器算法中選取合適的邊界曲線及不同控制區域的控制量會影響甚至決定跟蹤性能及微分品質。為此,本文提出一種綜合控制函數,該算法采用可變換的邊界層開關曲線,能夠根據不同情況恰當修改不同區域控制量,從而獲得跟蹤精度更好、抗噪聲能力更強的新型離散跟蹤微分器。
2.1 構造邊界曲線
對于雙積分連續串聯最速系統:
其離散化可以表示為:
其中:j=0,1,2,…,k。若系統經過k+1步,到達相平面的原點,即x(k+1)=0,可以推出起始點必須滿足:
由最優控制理論[23]可得,最速系統(8)的控制策略是一種開關曲線(見圖3):
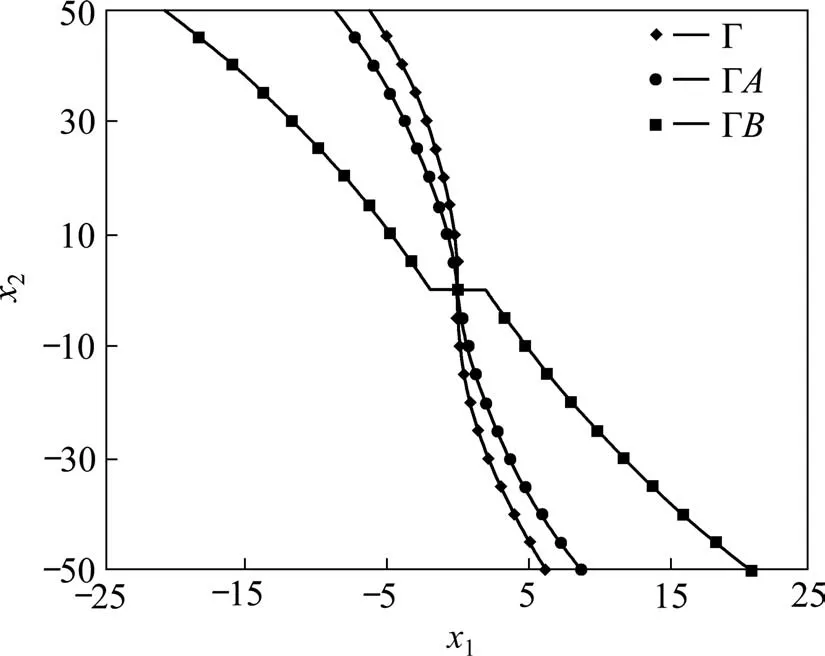
圖3 開關曲線Г以及邊界曲線ГA與ГBFig.3 Switching curve Гand boundary curve ГA and ГB
通過Lyapunov 函數可以證明系統(8)所有最速軌線都將在有限時間內到達原點。
相平面上的點在開關曲線的上方,控制量u取-r;位于開關曲線下方時,控制量u取+r。到達開關曲線時,控制量切換符號,在離散條件下,控制量切換的過程發生在一個線性區內,記為Ω,控制量在該區域內按線性標準變化。顯然這個線性區一定在開關曲線附近,因此要尋找線性區的邊界曲線以此判定非線性區以及線性區從而取不同的最優控制量。
由文獻[14]可知,邊界線有2 條,一條線上控制量均取-r或+r到達原點,將該類型初始點集合記為{a+k},{a-k},并構成曲線ГA,其中點集合{a+k}所在曲線為ГA+,點集合{a-k}所在曲線為ГA-;另一條曲線上的點集合{b-k},{b+k}。首先取-r(+r),然后全部取+r(-r)到達原點,構成曲線ГB,其中點集合{b+k}所在曲線為ГB+,點集合{b-k}所在曲線為ГB-。
對于曲線ГA+,初始點在第k+1 步到達原點x(k+1)=0,此時有u(j)=+r,j=0,1,2,…,k,由 式(11)可得:
因此整條曲線ГB(見圖3)可以表示為:
根據方程(11),(14)和(15),可構造出統一的邊界曲線表達式如下所示:
其中λ為變換因子,根據式(16)可得:
當λ=0 時,即為曲線ГA,當λ=1 時,即為曲線ГB,可根據初始點的區域靈活選取邊界曲線,進而尋求最優控制量。
2.2 構造控制綜合函數
相平面一點M(x1,x2)若在區域Ω 內并且2 步以內可以到達原點,則初始點x(0)以及相關控制量滿足方程(9),使得:
求解上式得到:
2 步內可以到達原點的點集合位于2 條平行線x1+hx2=h2r,x1+hx2=-h2r以及另外2 條平行線x1+2hx2=h2r,x1+2hx2=-h2r圍成的區域,記作此區域為Ωr;
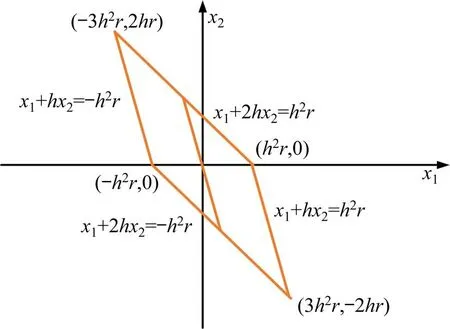
圖4 2步可達區示意圖Fig.4 Schematic diagram of two-step reacheable region
當M(x1,x2)在可達區Ωr內,取控制量u=(x1+2hx2);當M(x1,x2)位于線性區Ω 內但不在可達區Ωr時,取控制量u=-r?sgn(x2)?(1-2λ),λ取式(17);當M(x1,x2)位于線性區之外時:在第一象限或第三象限(即x1x2>0)時,控制量u取u=-r?sgn(x1+hx2);在曲線ГA-以及ГB+上方時,控制量取u=-r;在曲線ГA+以及ГB-下方時,控制量取u=+r。根據以上分析,構造本文所提變邊界層控制綜合函數表達式為:
最終跟蹤微分器(記為fst-TD)的表達式為:
其中:r為速度因子,代表跟蹤速度;c0為濾波因子,代表濾波程度。
3 仿真及試驗分析
3.1 數值仿真
為了驗證本研究所提fst-TD對于信號跟蹤濾波及微分提取的有效性,與fhan-TD 進行對比。分別選取輸入信號v(t)=sin(t)+η(t),η(t)為60 dB 的高斯白噪聲;v(t)=sgn(sin(t))+γ(t),γ(t)為強度0.01 均勻分布的白噪聲。仿真采樣步長與真車采樣步長一致:h=0.001,濾波因子c0與速度因子r均通過大量調試比較,得到較好的仿真結果。
通過圖5和圖6以及表2對比分析發現,fst-TD與fhan-TD 都可以有效地跟蹤原始輸入信號,但前者的跟蹤相位滯后及濾波性能均優于后者:當輸入信號為帶噪聲正弦信號時,Nf減小0.000 9,Lf減小0.044 8,表明濾波效果提升37.5%,相位滯后減小5.04%;當輸入信號為帶噪聲方波信號時,Nf減小0.002 1,Lf減小0.084 6,表明濾波效果提升33.87%,相位滯后減少30.34%。
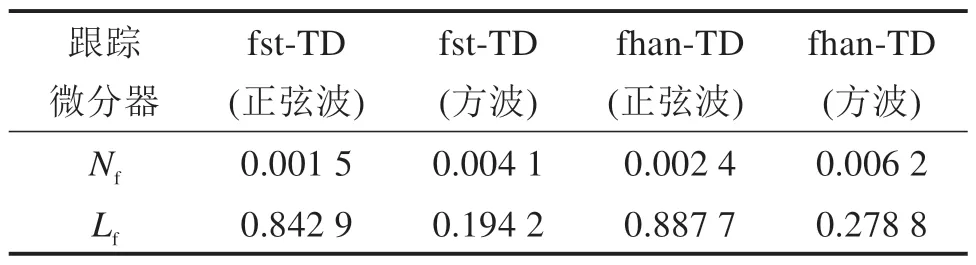
表2 輸入信號為帶噪聲方波及帶噪聲正弦波情況下fst-TD與fhan-TD對比Table 2 Comparisons of fst-TD and fhan-TD when the input signal is square wave with noise and sine wave with noise
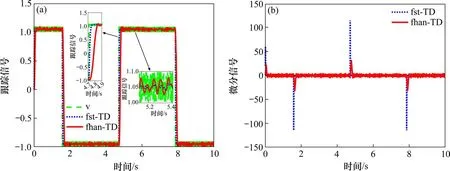
圖6 輸入信號為v(t)=sgn(sin(t))+γ(t)的跟蹤濾波及微分對比Fig.6 Comparisons of tracking filtering and differentiation when the input signal is v(t)=sgn(sin(t))+γ(t)
3.2 磁浮小車實驗測試
為驗證所提出的跟蹤微分器算法及其相應的懸浮反饋控制器,本部分內容將前述所提的控制結構應用到實驗室磁浮小車平臺進行實驗測試。
圖7為實驗室磁浮小車測試平臺,該磁浮小車參考國內中低速磁浮列車結構,整車由車體、轉向架、軌道和4個懸浮點組成。每個懸浮點包括電磁鐵、間隙傳感器、電流傳感器、加速度傳感器、渦流傳感器、信號調理電路、模擬量控制模塊和功放模塊。根據該磁浮小車實際運行工況,傳感器采集相應的間隙信號以及電壓信號顯示在上位機中,用作實驗數據進行分析。
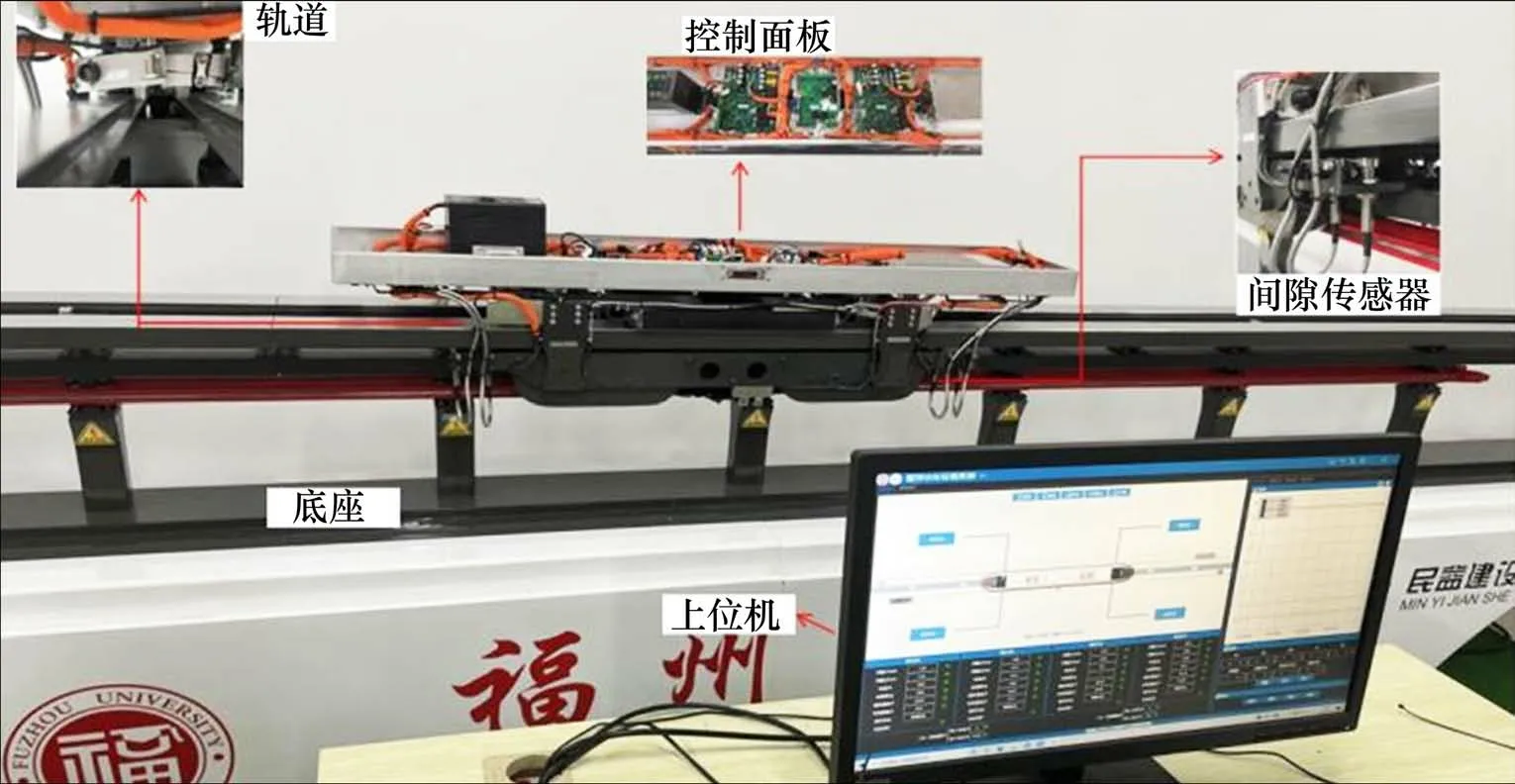
圖7 磁浮小車實驗平臺Fig.7 Maglev train experiment platform
由圖8(a)可知,在磁浮小車起浮階段,基于PIDfhan-TD 控制器的懸浮間隙超調量為8.554 7%,調節時間為0.253 s,而基于PID-fst-TD控制器的懸浮間隙為1.981 5%,較前者減少6.573 2%;調節時間為0.152 s,較前者減少0.11 s。由圖8(b)能夠看出,基于PID-fst-TD 控制器的懸浮速度信號(即間隙信號的微分信號)進入平穩運行的時間更短,震蕩幅度更小,表明基于PID-fst-TD的控制器能夠控制磁浮車懸浮更加穩定。
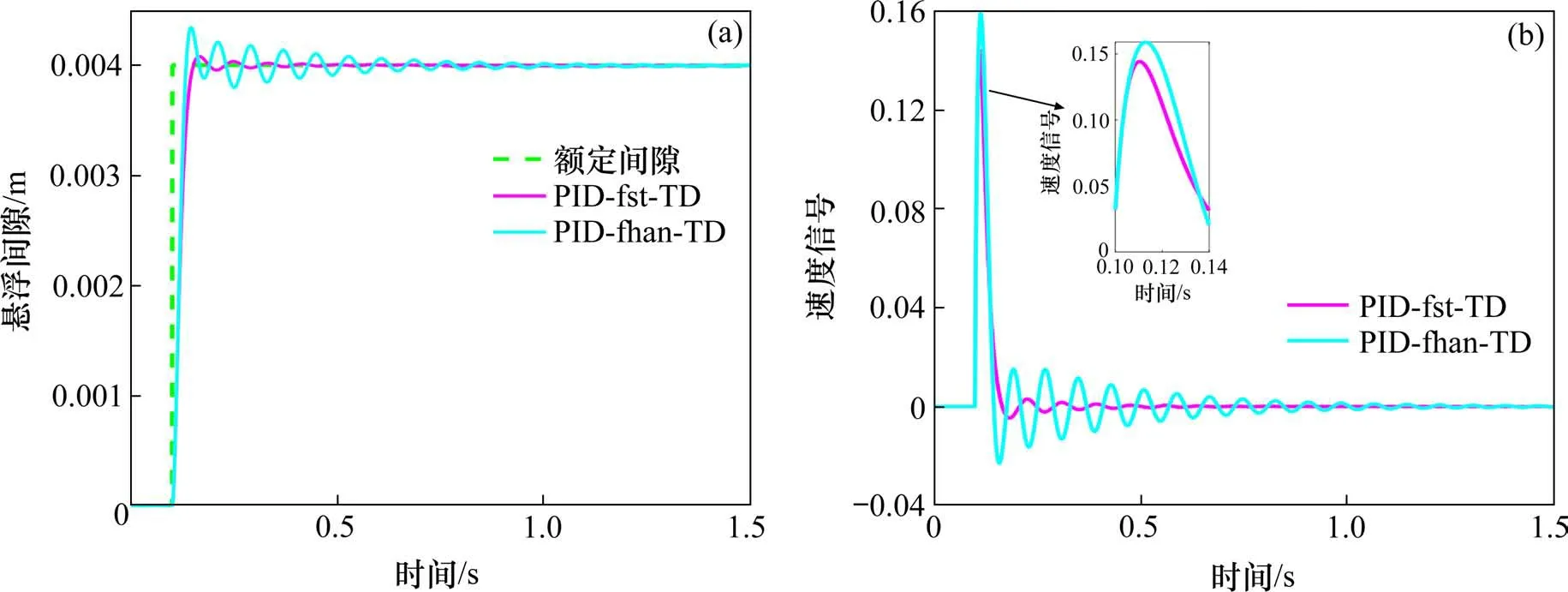
圖8 磁浮車起浮階段不同懸浮反饋控制器對比Fig.8 Comparisons of different suspension feedback controllers in the suspension stage of the maglev train
圖9為磁浮小車運行過程中,間隙傳感器存在不同強度噪聲情況下不同跟蹤微分器的濾波效果對比。為更加直觀對比濾波性能,引入以下性能指標進行定量分析:平方誤差積分準則(ISE)為,時間乘絕對誤差積分準則(ITAE)為為輸出間隙與額定間隙的誤差。其中ISE 越小代表整體振蕩越小,ITAE 越小代表整體誤差越小,輸出間隙曲線更加貼近設定值。

圖9 不同噪聲強度下懸浮系統輸出間隙濾波對比Fig.9 Comparisons of output gap filtering of suspension system under different noise intensity
從圖9可以看出,在磁浮車運行過程中受隨機噪聲的影響下,單純依靠PID控制器進行控制會造成極大的懸浮間隙上下波動,無法使磁浮車穩定懸浮,尤其是當噪聲強度較大時(圖9(a)),磁浮車甚至會發生吸死狀況。在輸出通道加入跟蹤微分器構成懸浮反饋控制器后,可以看到2 種TD 均能對帶隨機噪聲的間隙信號進行有效濾波,使懸浮間隙的浮動范圍極大減小。而基于本文設計的fst-TD 在工況a 及工況b 下的濾波表現均優于fhan-TD,通過表3 可以看出在工況a 下,ISE 減少了1.853 7×10-7,ITAE 減少了0.001 1;在工況b 下,ISE 減少了1.107×10-8,ITAE 減少了2.393 6×10-4。表明在懸浮系統輸出端加入fst-TD后,對噪聲的抑制能力更強,磁浮小車懸浮更加平穩。
4 結論
1) 提出一種簡易形式的新型跟蹤微分器算法,其控制綜合函數中不含有非線性運算,可靈活變換邊界曲線,形式簡單易于實現,相比于已有其他算法,數值仿真表明所提算法具有優秀的信號跟蹤及微分提取能力,實驗測試表明所提算法對于懸浮控制系統輸出通道中的隨機噪聲具有良好的濾波效果,并且有較好的相位品質,能夠滿足磁浮車在噪聲影響下穩定懸浮的需求。
2) 搭建PID 與TD 結合的懸浮反饋控制器,試驗結果表明PID-fst-TD 相比于PID-fhan-TD,在控制磁浮小車起浮過程中具有較小的超調量以及較小幅度的振蕩,并且控制磁浮小車進入平穩運行階段的時間更短。該反饋控制架構為磁浮車懸浮控制器的設計提供了一種新思路。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25