應(yīng)用RoF技術(shù)的小衛(wèi)星智能綜合測試系統(tǒng)
2023-11-13 09:41:32郝延福戴澗峰劉鋒劉紅杰張少坡高茹王文先
航天器工程 2023年5期
郝延福 戴澗峰 劉鋒 劉紅杰 張少坡 高茹 王文先
(航天東方紅衛(wèi)星有限公司,北京 100094)
隨著我國航天事業(yè)的不斷發(fā)展,航天器的發(fā)射數(shù)量逐年增加,日益增長的航天器測試任務(wù)和有限的測試資源之間的矛盾愈加突出。地面綜合測試系統(tǒng)是集測量、電子、通信、計算機(jī)和工程管理等多學(xué)科于一體、科學(xué)性和工程性相結(jié)合的綜合技術(shù)[1],直接影響到航天器研制的質(zhì)量和數(shù)量。目前,我國小衛(wèi)星批產(chǎn)綜合測試系統(tǒng)大多采用脈動式流水線作業(yè)模式,地面設(shè)備根據(jù)衛(wèi)星的測試需求進(jìn)行部署配置,測試設(shè)備分布在被測衛(wèi)星周圍。衛(wèi)星的射頻信號一般有S/X頻段擴(kuò)頻、統(tǒng)一S頻段測控(USB)、星間測控、中繼測控、甚高頻/特高頻(VHF/UHF)測控、GPS信號、數(shù)傳、中繼數(shù)傳等類型,射頻信號測試需求在整星測試階段經(jīng)常發(fā)生變化,星上射頻設(shè)備多樣化、復(fù)雜化導(dǎo)致地面射頻信號處理設(shè)備數(shù)量倍增、利用效率低、需要頻繁搬運[2],難以適應(yīng)大批量、需求多樣化的小衛(wèi)星測試需求。
光纖載射頻技術(shù)(RoF)將射頻信號調(diào)制到光載波上,以光纖作為傳輸媒介[3],充分利用了光纖的大容量、低損耗、抗電磁干擾等優(yōu)點[4],增加了射頻信號的傳輸距離,很好地解決了由于信號衰減而導(dǎo)致基帶、高碼速率解調(diào)器、變頻器和全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)仿真器等地面射頻設(shè)備束縛在測試工位附近的問題,在很大程度上提高了測試系統(tǒng)的靈活性和機(jī)動性,便于設(shè)備資源統(tǒng)一調(diào)度和維修保養(yǎng)。為此,本文對RoF技術(shù)在綜合測試系統(tǒng)中的應(yīng)用進(jìn)行研究,結(jié)合工程實踐提出了應(yīng)用RoF技術(shù)的小衛(wèi)星智能綜合測試系統(tǒng)設(shè)計。
1 智能綜合測試系統(tǒng)組成
智能綜合測試系統(tǒng)一般包括供配電專用測試設(shè)備(SCOE)、測控SCOE、總控測試設(shè)備(OCOE)、控制SCOE和有效載荷SCOE。各分系統(tǒng)SCOE模塊化、標(biāo)準(zhǔn)化設(shè)計對小衛(wèi)星批量測試至關(guān)重要。供配電SCOE的標(biāo)準(zhǔn)化通用接口設(shè)計和控制SCOE的小衛(wèi)星姿態(tài)控制通用地檢設(shè)備,已經(jīng)實現(xiàn)衛(wèi)星低頻接口規(guī)范標(biāo)準(zhǔn)化[5];OCOE負(fù)責(zé)測試網(wǎng)絡(luò)上遙測遙控數(shù)據(jù)轉(zhuǎn)發(fā)、解析、存儲;測控SCOE由GNSS仿真器、基帶、上下變頻器等組成;有效載荷SCOE與衛(wèi)星的用途緊密相關(guān);數(shù)傳SCOE屬于有效載荷SCOE的重要部分,主要接收衛(wèi)星有效載荷數(shù)據(jù),具有傳輸速率高、數(shù)據(jù)容量大的特點。應(yīng)用RoF技術(shù)的小衛(wèi)星智能綜合測試系統(tǒng)總體架構(gòu)見圖1。
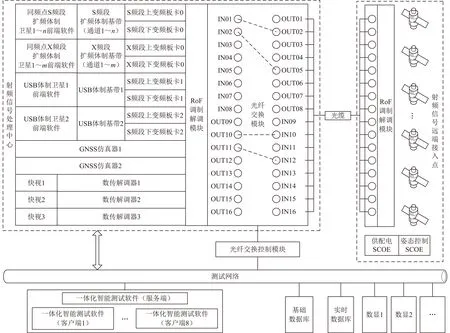
注:m和n分別為S和X頻段擴(kuò)頻體制基帶的通道數(shù)量;IN和OUT分別為光信號的輸入和輸出。圖1 小衛(wèi)星智能綜合測試系統(tǒng)總體架構(gòu)Fig.1 Overall architecture of small satellite intelligent test system
小衛(wèi)星智能綜合測試系統(tǒng)主要包括一體化智能測試軟件、射頻信號處理中心、光纜、射頻信號遠(yuǎn)端接入點,以及OCOE軟件和各分系統(tǒng)SCOE。其中:一體化智能測試軟件(服務(wù)端)主要是對外提供判讀、衛(wèi)星配置項管理、測試資源管理、智能執(zhí)行、數(shù)據(jù)處理服務(wù),一體化智能測試軟件(客戶端)主要用于測試人員和測試系統(tǒng)進(jìn)行人機(jī)交互,監(jiān)視測試過程[6],每個一體化智能測試軟件(客戶端)對應(yīng)著一顆衛(wèi)星;射頻信號處理中心包括射頻信號處理設(shè)備、RoF調(diào)制解調(diào)模塊和光纖交換模塊,RoF調(diào)制解調(diào)模塊的功能是實現(xiàn)射頻信號和光信號的轉(zhuǎn)換,從而使射頻信號能夠遠(yuǎn)距離傳輸,光纖交換模塊通過切換光信號通路實現(xiàn)射頻鏈路的交換,進(jìn)而實現(xiàn)地面射頻設(shè)備的分時共用;射頻信號遠(yuǎn)端接入點一般分布在測試大廳、振動臺和熱試驗罐周圍。
2 智能綜合測試系統(tǒng)詳細(xì)設(shè)計
2.1 RoF鏈路
2.1.1 RoF鏈路組成
RoF鏈路由射頻信號處理中心、射頻信號遠(yuǎn)端接入點和光纖3個部分組成。其中:射頻信號處理中心一般由射頻信號處理設(shè)備和RoF調(diào)制解調(diào)模塊組成,射頻信號處理設(shè)備實現(xiàn)遙控遙測信號的調(diào)制解調(diào),RoF調(diào)制解調(diào)模塊實現(xiàn)射頻信號與光信號的轉(zhuǎn)換;射頻信號遠(yuǎn)端接入點也對應(yīng)分布著RoF調(diào)制解調(diào)模塊;光纖連通射頻信號處理中心和遠(yuǎn)端接入點,通過傳輸光信號實現(xiàn)射頻信號遠(yuǎn)傳[7]。圖2為RoF鏈路的信號流。

圖2 RoF鏈路信號流Fig.2 Signal flow of RoF link
2.1.2 RoF鏈路實現(xiàn)原理
RoF鏈路一般采用直接調(diào)制和外調(diào)制2種技術(shù)體制。直接調(diào)制是指把需要調(diào)制的信號直接作用在光源上,通過改變激光器驅(qū)動電流大小使激光的功率隨調(diào)制信號變化。外調(diào)制是引入了調(diào)制器,光源發(fā)出穩(wěn)定的光功率信號后,將光束接入電光調(diào)制器,調(diào)制器的另一端輸入需要調(diào)制的電信號,通過電信號改變調(diào)制器的特定參數(shù)實現(xiàn)對光信號的調(diào)制。外調(diào)制技術(shù)具有調(diào)制速率高、非線性失真小、調(diào)制帶寬大、頻率啁啾小等優(yōu)點。相比直接調(diào)制,外調(diào)制技術(shù)可以提供更高的調(diào)制帶寬,具有更好的調(diào)制特性[8],考慮到衛(wèi)星射頻信號的帶寬需求,選用外調(diào)制技術(shù)。
馬赫曾德調(diào)制器(MZM)是外調(diào)制中使用最多、技術(shù)成熟的電光調(diào)制器。它利用LiNbO3的電光效應(yīng)通過調(diào)節(jié)施加在電極上的電壓改變自身折射率,從而實現(xiàn)電光信號的轉(zhuǎn)換[9]。雙臂MZM調(diào)制器將輸入的光信號分成2路并行信號,通過施加驅(qū)動電壓同時改變雙臂的折射率。MZM上下臂折射率的改變會導(dǎo)致2路光信號存在一定相位差并在輸出端產(chǎn)生干涉信號,當(dāng)2路驅(qū)動電壓完全相同、不存在相位差時,輸出端干涉加強(qiáng),輸出的光功率最強(qiáng)。當(dāng)2路驅(qū)動電壓之間存在180°的相移時,輸出端干涉抵消,輸出光功率最小。
激光器輸出光載波的光場表達(dá)式為Ein(t)=E0ej2πfct(E0和fc分別為光載波的幅度和頻率,t為時間),經(jīng)過MZM調(diào)制器后的光場表達(dá)式為
Eout(t)=Ein(t)(ejπV1(t)/Vπ+ejπV2(t)/Vπ)/2=E0(ej[πV1(t)/Vπ+2πfct]+ej[πV2(t)/Vπ+2πfct])/2=
E0[cos(πV1(t)/Vπ+2πfct)+cos(πV2(t)/Vπ+2πfct)+j(sin(πV1(t)/Vπ+2πfct)+sin(πV2(t)/Vπ+
2πfct))]/2=E0[cos(π(V1(t)+V2(t))/(2Vπ)+2πfct)cos(π(V1(t)-V2(t))/2Vπ)+
jsin(π(V1(t)+V2(t))/(2Vπ)+2πfct)cos(π(V1(t)-V2(t))/(2Vπ))]
(1)
式中:Vπ為調(diào)制器的半波電壓;VDC為調(diào)制器的偏置電壓;V1(t)與V2(t)分別為偏置電壓VDC對稱的電信號。
輸出的光信號經(jīng)過光纖傳輸?shù)竭_(dá)光電探測器,如果不考慮光纖信號損耗,則輸出電流為
E02[1+cos(π(V1(t)-V2(t))/Vπ)]/2
(2)
假設(shè)射頻信號為VRF(t)=V0cos(2πft),其中,V0和f分別為射頻信號的幅度和頻率;交流電壓和偏置電壓的歸一化系數(shù)分別為α=V0/Vπ和β=VDC/Vπ;當(dāng)調(diào)制器的上下兩臂對稱時,則有V1(t)-V2(t)=βVπ+αVπcos(2πft),代入到式(2)中,可得
Iout(t)=E02[1+cos(π(β+αcos(2πft)))]/2
(3)
通過式(3)可知:光電檢測二極管輸出的電流強(qiáng)度是關(guān)于射頻信號頻率f的函數(shù),通過選擇移相器可使輸出信號與輸入信號相位保持一致。
2.1.3 RoF鏈路評價指標(biāo)
RoF鏈路用于傳輸射頻信號,從信號傳輸角度來看,其具備射頻鏈路的基本參數(shù)指標(biāo)。但是,RoF鏈路中的激光器、光纖、電光調(diào)制器和光電探測器會引入額外的噪聲和非線性因素,例如光域的鏈路插損和熱噪聲,因此RoF鏈路的損耗和噪聲性能與傳統(tǒng)射頻鏈路相比有所不同,在使用RoF鏈路過程中需要重點關(guān)注以下指標(biāo)。
(1)射頻增益:輸出射頻信號功率與輸入射頻信號功率的比值,表達(dá)式為GRF=PRFout/PRFin。
(2)噪聲系數(shù):輸入射頻信號的信噪比與輸出射頻信號的信噪比的比值,表達(dá)式為F=SRFin/SRFout,表示經(jīng)過RoF鏈路傳輸后信噪比的惡化程度。
(3)動態(tài)范圍:表示鏈路中傳輸信號的功率范圍。RoF鏈路噪聲限制了可以傳輸信號的最小功率水平,鏈路的非線性限制了傳輸信號的上限。
2.2 光纖交換模塊
2.2.1 光纖交換模塊介紹
通過切換光纖路序可以實現(xiàn)射頻信號的交換,進(jìn)而實現(xiàn)射頻設(shè)備的靈活適配。如圖1所示,在RoF鏈路的射頻信號處理中心設(shè)計了光纖交換模塊,它包括控制模塊、光柵尺、伺服控制系統(tǒng)、伺服電機(jī)、傳動絲杠副、導(dǎo)軌、矩陣板、機(jī)械手、纖芯對接器、步進(jìn)電機(jī),主要是實現(xiàn)矩陣板兩側(cè)任意光纖的跳接功能。將光纜中的光纖端頭連接到套筒上,使用法蘭盤將套筒固定在矩陣板上;機(jī)械手通過光柵尺、傳動絲杠副、導(dǎo)軌和伺服控制機(jī)構(gòu)實現(xiàn)橫向和縱向移動;光纖交換控制模塊收到一體化智能測試軟件的指令后驅(qū)動機(jī)械手鎖定矩陣板兩側(cè)的目標(biāo)交換孔,然后將光纖跳線分別插入兩側(cè)套筒內(nèi)形成光信號交換的通路。所有操作完成后控制模塊向測試網(wǎng)中廣播矩陣板的跳接狀態(tài)。這里光纖跳接包括2種狀態(tài):①形成光信號交換通路即光纖跳接完畢;②套筒中沒有插入跳線未形成光信號交換通路,該套筒為空擋。
2.2.2 光纖交換原則
為了使RoF鏈路正常工作,進(jìn)行光纖交換時應(yīng)遵循以下原則。
(1)射頻信號上行鏈路和下行鏈路分離,上行、下行之間不能交換。如圖1所示,1至8表示上行光纖鏈路,9至16表示下行光纖鏈路;矩陣板中的輸入端只能和輸出端相連,光纖跳線只能左右兩側(cè)跳線,禁止上下同側(cè)跳線。
(2)在1顆衛(wèi)星測試過程中,測控信道建立后,光纖交換矩陣中對應(yīng)上下行鏈路跳線關(guān)系狀態(tài)鎖定,在一體化智能測試軟件中將相應(yīng)跳線指令設(shè)置為禁發(fā)狀態(tài),防止測控信號中斷。
(3)在測試過程中,地面數(shù)傳、中繼設(shè)備一般可以供多顆衛(wèi)星分時共享,可以通過一體化智能測試軟件控制光纖交換模塊實現(xiàn)光信號鏈路交換,同時向相應(yīng)SCOE下發(fā)操作指令,從而實現(xiàn)設(shè)備分時復(fù)用。
2.3 各分系統(tǒng)SCOE自動化控制
2.3.1 自動化控制拓?fù)潢P(guān)系
小衛(wèi)星智能綜合測試系統(tǒng)數(shù)據(jù)通信以一體化智能測試軟件為中心,一體化智能測試軟件與各SCOE控制軟件之間的指令信息以傳輸控制協(xié)議(TCP)方式進(jìn)行傳輸,SCOE的狀態(tài)參數(shù)以用戶數(shù)據(jù)報協(xié)議(UDP)組播方式發(fā)送至測試網(wǎng)絡(luò)。一體化智能測試軟件與各SCOE控制軟件進(jìn)行TCP連接時,各SCOE控制軟件作為服務(wù)器端,一體化智能測試軟件作為客戶端。一體化智能測試軟件與各分系統(tǒng)SCOE自動化控制包括兩大功能:①一體化智能測試軟件向分系統(tǒng)SCOE發(fā)送控制命令,SCOE
執(zhí)行命令并進(jìn)行反饋;②SCOE向智能綜合測試系統(tǒng)發(fā)送表征自身工作狀態(tài)的重要參數(shù)。SCOE自動化控制拓?fù)潢P(guān)系見圖3。
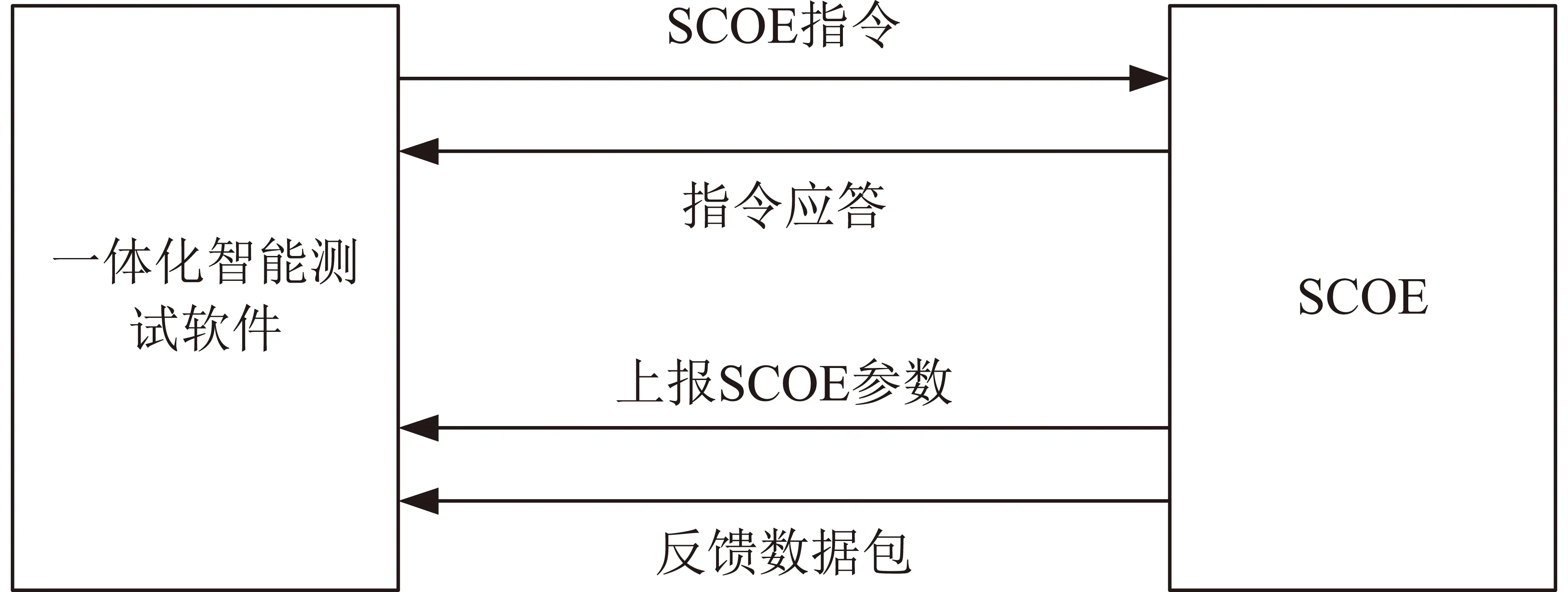
圖3 SCOE自動化控制拓?fù)潢P(guān)系Fig.3 Topological relationship for automatic control of SCOE
2.3.2 SCOE指令定義
SCOE指令一般采用符號指令,指令集合如表1所示,具體內(nèi)容可根據(jù)衛(wèi)星實際情況進(jìn)行調(diào)整。
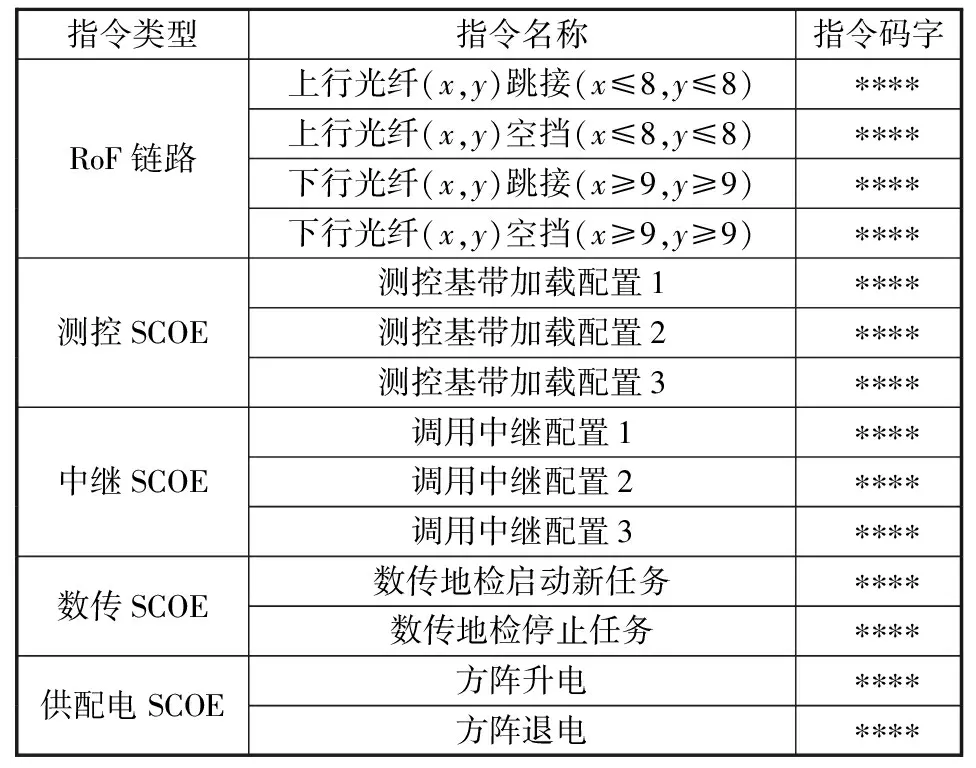
表1 SCOE指令集合Table 1 SCOE TC list
2.3.3 SCOE參數(shù)定義
SCOE參數(shù)上報一般按照1次/秒的頻率進(jìn)行,有特殊需求的可根據(jù)實際情況進(jìn)行上報。分系統(tǒng)SCOE在上報自身SCOE參數(shù)時,必須確保上報的參數(shù)涵蓋地面設(shè)備的全部重要狀態(tài),一般包括軟件啟動狀態(tài)、開機(jī)累計時間、指令收發(fā)計數(shù)、設(shè)備工作狀態(tài)等信息。
2.3.4 SCOE控制原則
各分系統(tǒng)SCOE接收一體化智能測試軟件的控制指令實現(xiàn)測試智能化,應(yīng)遵循以下原則。
(1)SCOE設(shè)備開機(jī)后,崗位人員手動運行SCOE控制軟件,此后所有的SCOE操作都可以通過SCOE指令完成,直到最后衛(wèi)星電測結(jié)束。
(2)收到一條SCOE指令后,地面設(shè)備完成一系列的操作。應(yīng)對涉及SCOE設(shè)備的操作進(jìn)行梳理,爭取以最少的SCOE指令實現(xiàn)所有崗位功能。
(3)在技術(shù)允許的情況下,SCOE設(shè)備關(guān)機(jī)操作最好也通過一條SCOE指令實現(xiàn)。
3 智能綜合測試系統(tǒng)應(yīng)用與特點
應(yīng)用RoF技術(shù)的小衛(wèi)星智能綜合測試系統(tǒng)通過光纖跳線實現(xiàn)射頻信號靈活切換,通過局域網(wǎng)互連實現(xiàn)一體化智能測試軟件與分系統(tǒng)SCOE的遠(yuǎn)程控制。圖4是以2顆衛(wèi)星測試為例說明智能綜合測試系統(tǒng)的測試運行過程,多顆衛(wèi)星測試過程以此類推,這里不再贅述。該測試模式與傳統(tǒng)測試模式相比具有以下特點。

圖4 應(yīng)用RoF技術(shù)的智能綜合測試系統(tǒng)測試過程Fig.4 Test process of intelligent test system using RoF technology
(1)通過光纖交換實現(xiàn)射頻信號切換,信號的交換在光域中進(jìn)行,完全避免了因射頻信號功率過大而造成星上或地面設(shè)備損壞。
(2)對于頻點相同的擴(kuò)頻測控模式的衛(wèi)星來說,可以共用上下變頻板卡,在調(diào)制解調(diào)基帶上使用多個通道實現(xiàn)多顆衛(wèi)星的測控,提高了測控設(shè)備的利用率。
(3)測控SCOE、GNSS仿真器和數(shù)傳解調(diào)設(shè)備可通過交換光纖路序?qū)崿F(xiàn)設(shè)備靈活動態(tài)調(diào)配。
(4)光纖傳輸距離遠(yuǎn),RoF鏈路完全可以滿足衛(wèi)星在園區(qū)內(nèi)進(jìn)行各種大型試驗的測試需求,不必頻繁搬運射頻地面設(shè)備。
(5)RoF鏈路改變了由于信號衰減導(dǎo)致地面射頻設(shè)備必須束縛在被測衛(wèi)星周圍的測試模式,能實現(xiàn)地面射頻設(shè)備集中管理、統(tǒng)一調(diào)配。
4 結(jié)束語
小衛(wèi)星批量測試的研究本質(zhì)是探索如何將復(fù)雜測試流程進(jìn)行批量化生產(chǎn)測試的過程,測試過程中的專業(yè)化分工越具體,生產(chǎn)效率越高,測試資源越集中,降本增效的效果越明顯。本文應(yīng)用RoF技術(shù)的小衛(wèi)星智能綜合測試系統(tǒng)探索,將地面射頻信號處理設(shè)備進(jìn)行統(tǒng)一集中管理,對地面設(shè)備提供預(yù)測性維護(hù),可為小衛(wèi)星地面測試系統(tǒng)的設(shè)計提供借鑒。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00