基于Simulink 的直流電動離心泵動態系統建模及控制系統設計
2023-11-15 11:31:02耿胡銳許繼洋汪自成田夢媛
自動化與儀表 2023年10期
耿胡銳,許繼洋,汪自成,田夢媛
(1.武漢工程大學 機電工程學院,武漢 430205;2.武漢市光谷第六小學,武漢 430073)
離心泵是一種機械復雜度較高、噪音大、結構復雜、使用壽命較長,功率較大的裝置[1],以旋轉形式產生壓力,被廣泛運用于許多工業領域。其中,離心泵在船舶系統中主要運用于船舶的諸如消防、壓載、排水等各種系統中[2]。在實際生產生活中,進行產品設計前,運用計算機仿真可極大地減少資源的消耗。利用這項技術,可以實現由計算機取代人類進行工業制造生產[3]。若想利用計算機進行實際系統的仿真工作,完成實際系統數學模型的建立這一步驟必不可少。
目前,國內學者對離心泵系統的研究主要采用三維建模加數值模擬或有限元分析的方式。文獻[4]利用Solidworks 軟件建立了泵體和葉輪的三維模型,在雷諾時均方程和RNG k-εt 湍流模型的基礎上,獲得了內流場的靜壓和速度分布情況;文獻[5]通過對離心泵零件網格劃分的研究,得到了一種精確、高效、實用的有限元建模方法;文獻[6]完成了離心泵系統中基于內特性和外特性的離心泵的動態建模方法,并給出了其在水泵啟動過渡過程中的應用;文獻[7-8]完成了基于外特性的離心泵系統啟動過程動態建模的過程,并結合相似理論和泵機組動力學特性建立了離心泵啟動過程的數學模型。
根據對實際系統的理論建模的4 個步驟,在完成數學模型建立之后需對數學模型進行分析求解,然后進行仿真使計算結果可視化[9]。Simulink 是美國Mathworks 公司推出的MATLAB 中的一種可視化仿真工具,用于多域仿真以及基于模型的設計。Simulink提供圖形編輯器、可自定義的模塊庫以及求解器,能夠進行動態系統建模和仿真,由于其模塊的豐富性,被廣泛應用于各類工業設備和科學研究等方面[10]。
以上研究或完成了離心泵或離心泵系統的理論建模,或利用有限元分析軟件和三維建模軟件等工具針對離心泵進行了流體分析等工作,未完成從實際模型到理論模型建立再到控制系統搭建的完整步驟。本文運用MATLAB/Simulink 工具,完成了2種典型離心泵系統動態模型的構建,并針對其中一種典型系統完成了完整的控制系統設計的工作,考慮了實際系統中液位變化的極端情況,添加了示警模塊,為離心泵控制系統的進一步研究提供了理論支撐和研究思路。
1 離心泵抽水系統的數學模型
數學模型是根據物理和流體力學的基本定律,通過設備的動態分析得到的[11]。本部分所研究的泵系統主要由高速直流電機、離心泵和恒定液位的水箱組成。系統數學模型的確立包括離心泵數學模型的建立和水箱數學模型的建立。水箱內不斷接收輸入流量為Qv1的液體,通過控制閥的輸出流量為Qv2。該泵系統的功能方案如圖1 所示。
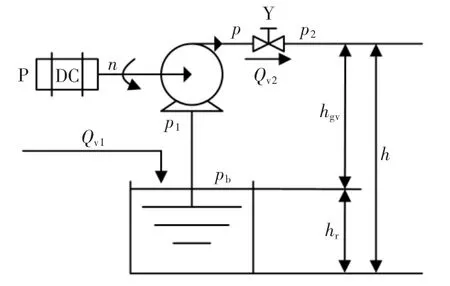
圖1 泵系統功能方案Fig.1 Pump system functional plan
1.1 離心泵數學模型的建立類比牛頓第二定律:
力矩M、角速度ω、加速度a、轉動慣量l 之間的關系如下:
類比以上公式可知角加速度與軸上力矩成正比,因此,電機上力矩平衡方程可表述為[12]
式中:J 為轉動慣量(具體為一比例常數);MDC為直流電機主動轉矩;MP為泵的被動/電阻轉矩;Mζ為粘性力矩。
設直流電機的額定(輸出)功率為P(單位:kW),額定轉速為n(單位:r/min),直流電機轉矩可表述為
泵的被動轉矩Mp和粘性力矩Mζ可分別表述為
離心泵基本參數為泵流量Qv、揚程H、角速度ω,泵流量可用葉輪周邊截面和子午速度分量來表示,因此流量與角速度成正比,故在泵效率系數為常數時,對于不同的操作模式有以下規律:
式(9)適用于任意兩種操作模式,將式(7)、式(8)代入式(9)中可得:
由式(10)可知離心泵的被動轉矩與流量Qv2和角速度ω 成正比。
離心泵特性曲線包括Qv-H 曲線(流量-揚程曲線)和Qv-η 曲線(流量-效率曲線)2 種[13]。由于離心泵動力學的復雜性,可以假設Qv-H 曲線具有足夠的精確度來描述泵在過渡狀態的工況,即使用泵的靜態特性。離心泵的特性曲線可用以下方程描述:
式中:A、B、C 為不同型號泵的特性常數。式(11)為一參數為ω 的拋物線族,即該表達式決定了離心泵的靜態特性族。根據式(11),通過其標稱值表示Qv和ω,泵揚程為
泵入口處的壓力可由泵和吸入管道的聯合操作確定,對于已定工況的管道泵,驅動液體流過管道所需的能量等于泵向液體施加的能量(Hpotr=H)[14]:
由于揚程實際等于相同直徑泵入口和出口處的壓力差,參考式(13)可得出:
式中:Qv2為通過控制閥的流量,可表示為閥中的壓降:
式中:kv為閥常數;函數A(Y)表示閥的橫截面隨主軸位置變化而變化的情況,此變化情況通常為非線性變化。
故離心泵的阻力扭矩為
將獲得的各部分扭矩代入式(5)可得:
方程(18)定義了考慮設備的離心泵的非線性數學模型。
1.2 恒定液位水箱數學模型的建立
系統運行期間水箱中液位的動態變化由質量守恒原理決定。水箱中的質量變化等于水箱的輸入質量減去水箱的輸出質量,即:
式中:Qm為質量流率(Qm=ρQv)。
她立即瞥了兩個黑斗篷一眼,還好,不像有人注意到。她賠出籌碼,拿起茶杯來喝了一口,忽道:“該死我這記性!約了三點鐘談生意,會忘得干干凈凈。怎么辦,易先生先替我打兩圈,馬上回來。”
假設流體密度ρ 隨時間變化恒定(不可壓縮流體),水箱為一橫截面積為A 且橫截面面積不隨時間變化的棱柱形。以此假設情形,水箱中一定質量的液體m(t)對應水箱中特定流體高度hr(t)有:
式中:Qv2為經由式(16)確定的耦合變量;流體高度hr為經由式(20)確定的耦合變量。將此裝置作為被控對象,地形吸力高度hgv是輸出變量之一。由于hgv和hr之和為一定值h,hr的變化也能同時反應hgv在相反方向的變化,即:
消除式(20)中的耦合變量,可得裝置內水箱的非線性數學模型:
2 離心泵輸水系統的研究
MATLAB/Simulink 是機電一體化系統基于模型設計的領先的軟件工具之一,也是控制系統開發和仿真工作的重要輔助工具。對實際系統的理論建模可以通過以下步驟完成:首先對實際系統進行簡化,從而得到系統的物理模型;再根據系統的物理模型編寫相關數學方程式,根據數學方程式可以形成實際系統的數學模型,數學模型可以用計算模型進行求解;最后通過仿真將計算結果可視化。
2.1 離心泵輸水系統數學模型的建立
如圖2 所示,該離心泵輸水系統是一個帶有流出閥的液體罐。模擬系統將計算并實時顯示液體罐內的液面高度h。在實際情況時,液體罐液體流出速率較慢,在模擬系統中會對進程進行加速,以使模擬時間比實時運行得更快來避免不必要的時間浪費。由于模擬是實時的,會給人一種真實的感覺,用戶可以通過調節泵控制信號u 來調節輸入。每個模擬系統都基于需要模擬的系統的數學模型,因此應建立儲液罐的數學模型。
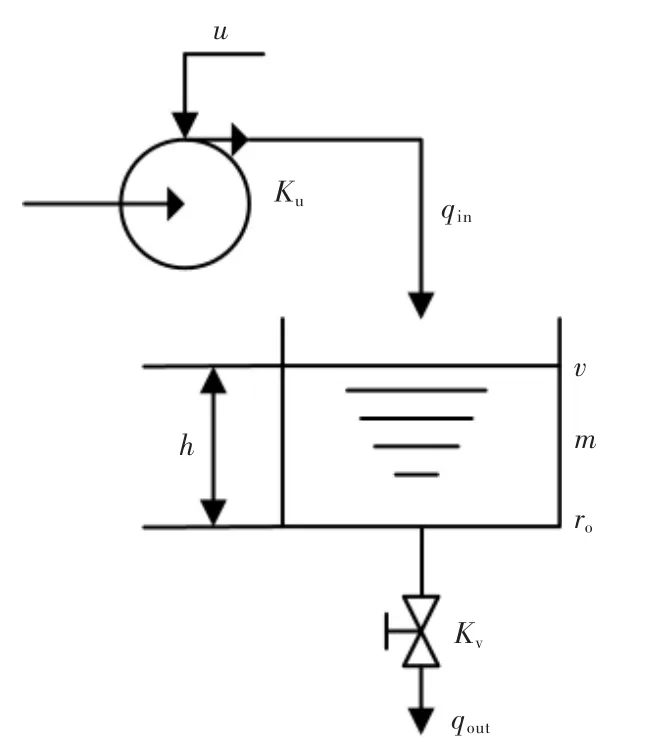
圖2 儲液罐的物理模型Fig.2 Physical model of liquid storage tank
首先對實際系統進行簡化。通過引入相關假設,可以簡化實際系統,然后可以藉此構建相應的物理模型。現引入以下假設(以下表達式中使用的參數如圖2 所示):
(1)假設液體不可壓縮,即液體的密度ρ 為常數;
(2)假設儲液罐內壁垂直,即橫截面積A 為常數;
(3)假設儲液罐中液體質量和罐內液體高度的關系為
(4)假設泵進口體積流量與泵的控制信號成正比例關系,即:
(5)假設通過閥門出口的液體體積流量與閥門壓降的平方根成正比,假設該壓降等于儲液罐底部的靜水壓力:
根據質量守恒定律,儲液罐中液體的連續性方程可寫為
代入以上假設中關系式得:
基于上述方程,可以繪制出該模型的數學框圖,該框圖可以在模擬框圖中實現,作為繪制數學框圖的起點,微分方程(27)可被寫為以下形式:
以上方程(28)為儲水罐內液面高度隨時間變化的微分方程,即上述儲水罐的數學模型。根據方程(28)對相對于從0 到t 時刻進行積分時,可通過模擬系統得到t 時刻儲水罐內液面的高度。設儲水罐內液面的初始高度為hinit,根據式(26)~(28)可得系統的最終框圖如圖3 所示。
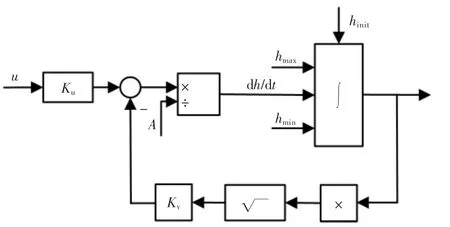
圖3 儲液罐的數學框圖Fig.3 Mathematical block diagram of liquid storage tank
2.2 系統仿真
Simulink 提供了許多不同的基本運算模塊,可以在Simulink 庫瀏覽器中找到所需要的模塊,點擊加入到Simulink 窗口的位置,然后通過模塊之間的接口進行連接,通過點擊相應模塊并輸入相應的數字來對模塊進行配置。在模擬的儲液罐液位時,液位的初始值為0.5 m。離心泵的控制信號u 在20 s之前輸入為0,在20 s 時電壓變化為0~0.01 V。模擬從0 s 開始到50 s 內儲液罐內液面的變化,其余各參數的數值如表1 所示。
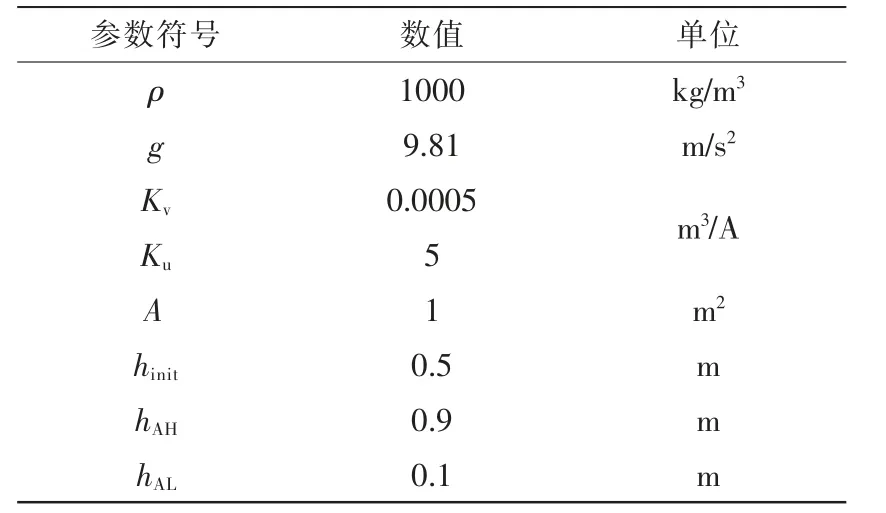
表1 輸水系統參數表Tab.1 Parameter of water transmission system
根據建立的Simulink 仿真模型,輸入電機的控制信號如圖4 所示。
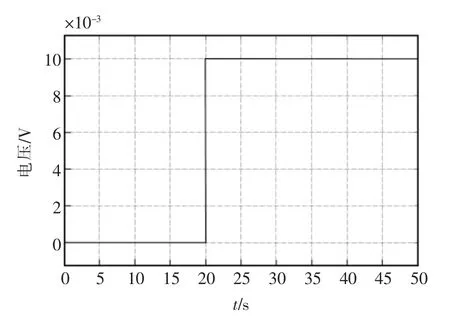
圖4 離心泵控制信號圖Fig.4 Control signal diagram of centrifugal pump
假設實際系統中存在一個液位傳感器,在儲水罐中液面過高或者過低時,會發出警報信號。設高點警報水位高度為hAH=0.9 m,低點警報水位高度為hAL=0.1 m,此兩條警戒水位線應與儲水罐內水位變化同時表示。根據以上數據,得到Simulink 仿真結果如圖5 所示。由圖可見,儲水罐初始液面高度為0.5 m,在打開閥門20 s 后液面達到警戒水位以下,控制系統開始工作,儲液罐中液面開始緩慢增加。控制結果證明了本文設計的離心泵輸水系統的控制系統的有效性。
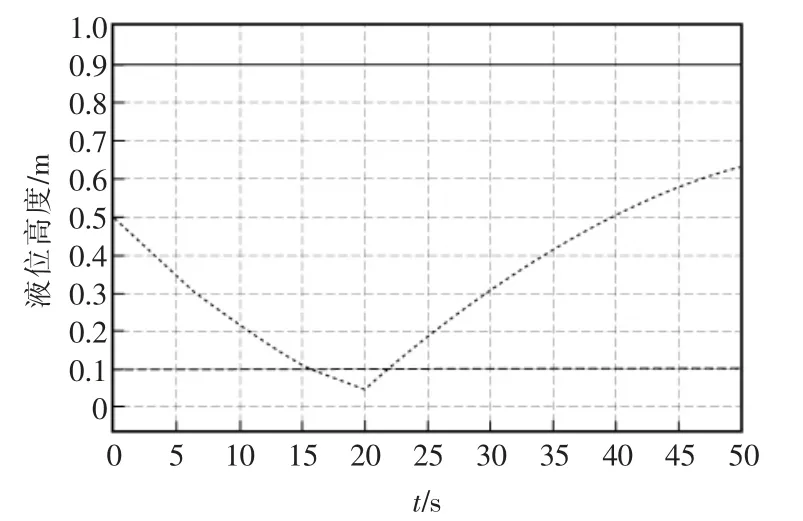
圖5 儲液罐內液位變化示意圖Fig.5 Schematic diagram of liquid level changes in the storage tank
3 結語
離心泵系統的數學模型不僅從底層反應了實際系統的物理規則和運行模式,還為進一步研究離心泵系統如仿真和控制系統的建立提供了支撐。目前國內對離心泵系統的研究大多只限于運用有限元分析等軟件工具對實際系統進行模擬,針對底層數學原理的研究較少,本文通過對離心泵系統的動態建模,分析并建立了典型離心泵系統的動態模型,對后續離心泵控制系統的設計和優化等工作具有相當重要的意義。此外,本文所設計的離心泵控制系統簡單可靠、可適用性強,可廣泛推廣于其他領域的運用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19