振動監測技術在煤礦提升系統中的應用研究
2023-11-15 08:31:50郭華偉李海鵬
山東煤炭科技 2023年10期
關鍵詞:振動
郭華偉 李海鵬
(河南龍宇能源股份有限公司陳四樓煤礦,河南 永城 476600)
陳四樓煤礦主井提升為塔式提升系統,提升機為德國西馬格GHH-4×4 型摩擦輪式提升機,主電機為德國西門子公司生產的IDQ6034-6AA10-Z 型內裝式他勵交流同步電動機,摩擦輪滾筒及導向輪(也稱天輪,下同)直徑均為4 m。滾筒承載著首尾繩、雙箕斗和提升煤炭的重量,提升變位質量32 508 kg,主軸標高+55.65 m;導向輪引導鋼絲繩用于導向,變位質量5400 kg,主軸標高+47.15 m。
該礦主井提升系統缺少主電機滾筒軸承及導向輪軸承振動數據在線監測監控,在提升機運行期間需依靠電鉗工現場巡視旋轉部位,根據自身經驗去判斷兩端軸承運轉狀況,維護人員還需定期打開軸承端蓋檢查內部磨損程度。人工巡檢這種傳統方式既浪費了人力物力,又難以保證振動數據真實準確及連續測量,不能實時在線監測提升機軸承的運轉狀態和完成預警功能,嚴重制約了主井提升系統安全生產[1]。為化解上述風險,該礦根據現場實際情況設計、安裝和應用在線振動監測系統,實現連續監測,實時監測軸承運行狀態,及時發現故障隱患,有效避免突發性重大事故的發生,保障提升系統安全運行。
1 振動在線監測的設計方案
該礦在主井提升機摩擦輪滾筒軸承及導向輪軸承兩端合適位置安裝振動傳感器,用于將軸承振動數據轉化為有規律的電流信號;在緊挨滾筒與導向輪之間合適位置安裝一套以西門子S7-200 SMART可編程控制器為核心的數據采集箱,用于采集振動傳感器輸出的電流信號;將數據采集箱內可編程控制器CPU 以太網端口通過自動化平臺工業交換機,接入該礦基于工業環網的綜合自動化系統[2],實現與提升機電控系統在數據上互聯互通;運用STEP7-Micro/WIN SMART 編程軟件編寫軸承振動數據采集及聲光報警控制應用程序,來處理振動傳感器采集軸承運行狀態下的電流信號,轉換成實際工程值,經基于工業環網的綜合自動化系統傳送到提升機電控系統上位機后,進行數據儲存和監視[3];在基于組態軟件WinCC V7.3的原有監控畫面組態基礎上,增添“陳四樓主井振動監控”界面,實現振動數據實時顯示及振動幅值過大報警指示功能;在主井提升機電控系統操作臺控制柜中,增添MY4N-J 型繼電器K、LTE-1101J 型旋轉式警鈴等電氣元器件,該繼電器線圈吸合及警鈴報警所需的DC24V 電源取自操作臺控制箱中的直流電源模塊,繼電器K 線圈吸合由數據采集箱中西門子S7-200 SMART 可編程控制器的輸出端Q0.0 控制,其一對常開輔助觸點再去控制旋轉式警鈴的通斷,來實現軸承振動幅值過大時聲光報警功能。利用聲光報警及上位機數據顯示功能,實時向提升機司機和工程技術人員展示滾筒軸承及導向輪軸承運行狀態,給維護人員提供數據支撐與診斷參考,如圖1。
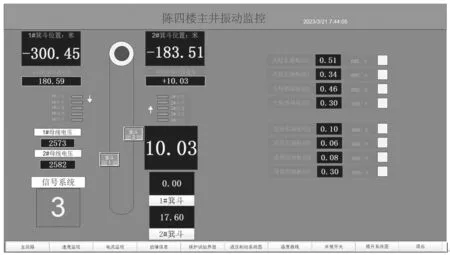
圖1 振動監控畫面效果圖
2 振動在線監測系統的構建
振動作為機械旋轉部位安全運行的重要指標,振動數據能直觀地反應出旋轉部位的運行工況,其數值通過振動傳感器易于拾取,可在不影響機械安全運轉的前提下,實現振動數據在線監測與潛在故障分析診斷。通過對振動傳感器選型及布設的研究,確定采集終端性能參數、安裝位置,確保源頭數據精度及準確性;對數據采集箱中可編程控制器進行組網和編寫控制程序,實現振動數據采集及外部聲光報警功能;對提升機電控系統上位機振動監控界面進行組態及應用,實時顯示振動數據和振動幅值過大報警指示。
2.1 振動傳感器的選型及布設
在傳感技術中,傳感器的功能與品質決定了傳感系統獲取自然信源的信息量和信息質量,是高品質傳感技術系統構造的第一個關鍵[4]。為保證振動數據測量精度、性能穩定以及安裝便捷性[2],該礦選用二線制磁吸式振動傳感器,型號為KZ9200-20-1。此傳感器與變送器一體化設計,接線簡單、維護方便,其主要參數:外部供電為24VDC,振動速度信號量程為0~20 mm/s,輸出電流信號為4~20 mA,安裝方式為水平或垂直。
振動傳感器應放置在緊靠軸承和其支撐架接合處,在垂直于軸承軸線同一平面上,沿徑向方向安裝兩只相互垂直的傳感器[5]。該礦在主井提升機摩擦輪滾筒軸承、導向輪軸承兩端,沿垂直于軸線同一平面的水平方向X 和垂直方向Y,分別將上述型號傳感器依靠其自身磁性直接吸附安裝在軸承套指定位置。摩擦輪滾筒及導向輪東西兩軸共計安裝8只振動傳感器。
2.2 振動數據采集PLC 的組網及編程
數據采集箱中西門子S7-200 SMART 可編程控制器,是由CPU ST20 模塊和兩塊擴展的EM AE08模擬量輸入模塊組成。將安裝在主井提升機摩擦輪滾筒軸承、導向輪軸承東西兩端的8 只二線制振動傳感器依次接入EM AE08 模擬量輸入模塊各端口,從AIW16 起始8 個字的地址,依次對應8 路振動信號模擬量輸入,如AIW16 為“天輪東軸振動Y”、AIW18 為“天輪東軸振動X”的輸入地址等。利用RJ45 插頭及雙絞網線將可編程控制器CPU 以太網端口與自動化平臺工業交換機接口連接起來,接入該礦基于工業環網的綜合自動化系統。在以太網通信協議之下,實現數據采集箱中可編程控制器與提升機電控系統上位機實時通信,通過編程軟件對工控現場進行編程與調試[6]。
打開提前安裝在主井提升機電控系統上位機中的編程軟件STEP7-Micro/WIN SMART,新建“陳四樓主井振動程序”項目,根據所選可編程控制器各模塊型號、版本和振動傳感器型號,雙擊項目樹中系統塊圖標進入系統塊設置窗口,進行硬件組態,對模擬量輸入模塊EM AE08 設置各通道類型、范圍等參數。在程序編寫過程中,通過調用模擬量轉換庫中S_ITR 指令,來處理振動傳感器輸入的電流信號,轉換成相應實際工程值。以第一路模擬量輸入AIW16 為例,分析程序邏輯關系:其中S_ITR指令使能端EN 前串聯一個始終接通的特殊寄存器SM0.0,確保程序每次掃描時執行該條指令;Input為模擬量輸入通道,輸入需要轉換的數值,即模擬量輸入地址AIW16“天輪東軸振動Y”;ISL、ISH 為可編程控制器運算的模擬量最小值5530 與最大值27 648,對應振動傳感器輸出電流信號4~20 mA;OSL、OSH 為實際工程值最小值0 與最大值20,對應振動傳感器振動速度信號量程0~20 mm/s;Output 為S_ITR 指令轉換的現場實測值,存放在寄存器VD0 中。
根據該礦主井提升機實際運行工況,設定摩擦輪滾筒及導向輪軸承振動速度過大故障報警閾值為3.0 mm/s,在編程過程中調用操作數為實數的比較指令︱≥R︱,讓現場軸承振動實測值VD0等與故障報警閾值3.0 mm/s 作比較[7]。當實測值VD0 ≥3.0 時,置位V100.0,此時V100.0 作為提升系統上位機監控界面第一路振動數據幅值過大報警的當前過程值,用于畫面組態;同時V100.0 與其余振動通道V100.x 等常開點并聯后接輸出線圈Q0.0,實現8 路振動監測任何1 路或多路實測值大于故障報警閾值時,都能使輸出線圈Q0.0 得電輸出為1,以此作為外部聲光報警信號控制單元,使安裝在提升機操作臺控制柜中的繼電器K 線圈得電吸合,進而控制旋轉式警鈴的電源通斷,實現軸承振動幅值過大時聲光報警功能。程序編寫完畢后,依次單擊編程軟件工具欄中的“保存”、“下載”圖標,系統將把硬件組態和程序下載至可編程控制器中。
2.3 上位機振動監控界面的組態及應用
安裝在上位機的組態軟件WinCC V7.3,可在其界面下進行組態、編程和數據管理,形成工控所需的監視畫面、控制畫面、報警畫面及實時趨勢曲線等[8],為提升機司機和維護人員提供形象直觀的操作環境,提高了工作效率。在該礦原有的“陳四樓煤礦主井提升監控系統”組態基礎上,新建一個名稱為“陳四樓主井振動監控”的監控畫面,通過對該畫面組態,實現實時監視滾筒軸承、導向輪軸承運行狀態。組態過程如下:
組態軟件WinCC 中沒有與S7-200 SMART CPU 通信的驅動,兩者需靠OPC 協議進行數據交互。PC Access SMART 是西門子公司為S7-200 系列PLC 開發的OPC 軟件,通過此軟件可以讀取S7-200 SMART 可編程控制器程序中的變量數據,實現設備監控功能或進行數據存檔管理[9]。在該礦主井提升機電控系統上位機中安裝此軟件,依次設置其網絡接口卡、條目屬性等參數后,將數據采集箱內S7-200 SMART 可編程控制器程序中有符號名如“天輪東軸振動X”、“天輪東軸振動X 報警”等所有變量,導入到此軟件中。
在 組 態 軟 件WinCC 與S7-200 PC Access SMART 軟件之間建立OPC 通信連接:啟動安裝在該礦主井提升機電控系統上位機的組態軟件WinCC后,右鍵單擊左側瀏覽窗口中的“變量管理”,打開“WinCC Configuratiao Studio”對話框,在此窗口中右鍵單擊“變量管理”,在打開的快捷菜單中選擇“添加新的驅動程序”,添加“OPC”驅動;右鍵單擊“OPC Groups”后點擊“系統參數”,在“OPC 條目管理器”對話框中選擇“OPC.SimaticNET.1”,點擊窗口中“瀏覽服務器”進行搜索并添加變量連接條目,將其命名為“振動監視”;在變量列表中點擊“添加條目”按鈕,添加“天輪東軸振動X”、“天輪東軸振動X 報警”等變量后,即可自動建立連接。
右擊組態軟件WinCC 資源管理器中圖形編輯器,單擊“新建畫面”菜單項,創建并重命名為“振動監視.pdl”的一個過程畫面。在此畫面中添加“天輪東軸振動X”等靜態文本,在各文本后面插入一個能顯示振動實際值的“輸入/輸出域”和振動幅值過大故障指示的“矩形”。當軸承振動實際值大于設定的故障報警閾值(3.0 mm/s)后,振動幅值過大故障指示的“矩形”由綠色變成紅色。鼠標右擊“天輪東軸振動X”靜態文本后面的“輸入/輸出域”,依次單擊快捷菜單中“鏈接”、 “變量連接”,打開“變量連接的鏈接”對話框,右擊左側“天輪東軸振動X”文字后,在下一個對話框中選擇天輪東軸振動X 對應的變量鏈接,點擊“確定”完成組態,如圖2 所示。同理組態其他變量后,依次單擊工具欄上的保存、激活圖標按鈕,WinCC 即可運行優化的監控畫面[10]。

圖2 上位機WinCC 監控畫面的組態
3 效果分析
1)經濟效益。應用軸承振動在線監測技術,實現提升機運行狀態下提前預警和診斷,降低軸承故障概率,減少生產影響時間,為礦井高效生產提供強有力保障;同時檢修人員及時有效維護,確保滾筒及導向輪軸承在良好工況下運轉,增加其使用壽命,節省維修成本,最大限度減少人力、物力投入,具有一定經濟效益。
2)安全及社會效益。提升機滾筒及導向輪軸承在線監測系統的設計、安裝和應用,能夠實時監測軸承運行狀態,有利于技術人員及時發現安全隱患,大大降低礦井安全風險,避免突發性重大事故發生,保障提升系統安全可靠運行,給煤礦企業安全生產帶來良好的社會效益。
4 結語
通過對陳四樓煤礦主井提升機滾筒、導向輪軸承振動監測技術的應用研究及數據分析,完善了提升機在線監測系統,實現完備的顯示及報警功能,實時向提升機司機和工程技術人員展現滾筒、導向輪軸承運行狀態,給主軸承維護提供數據支撐與診斷參考。實踐證明,振動監測技術在提升系統中應用,有利于維保人員及時發現提升機主軸承故障隱患,能夠遏制重大事故發生,確保提升系統安全有序運行。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00