基于機器視覺的無人機旋翼移印缺陷檢測研究
2023-11-16 08:17:30陳銳鴻
制造業(yè)自動化 2023年10期
關(guān)鍵詞:檢測
陳銳鴻,宋 建
(1.廣州城市理工學院 機械工程學院,廣州 510800;2.華南理工大學 廣東省高分子先進制造技術(shù)及裝備重點實驗室,廣州 510640;3.華南理工大學 聚合物加工工程教育部重點實驗室,廣州 510640)
0 引言
移印,屬于特種印刷方式之一。它能夠在不規(guī)則異形對象表面上印刷文字、圖形和圖像,現(xiàn)在正成為一種重要的特種印刷。例如,手機表面的文字和圖案就是采用這種印刷方式,還有計算機鍵盤、儀器、儀表等很多電子產(chǎn)品的表面印刷,都以移印完成。
移印技術(shù)和網(wǎng)版印刷技術(shù)作為主要的裝飾方式更是得到超常的發(fā)展。隨著自動化生產(chǎn)技術(shù)的升級換代,視覺檢測越來越多運用于生產(chǎn)線上,當前國內(nèi)外對于絲印缺陷[1-2]的研究開展得比較早,文獻[1]通過計算邊緣以及擬合直線對硅太陽能電池絲印的破損進行檢測,由于旋翼的形狀是曲面,且采用的是移印的方式,它與絲印的檢測明顯不同,而目前對于移印的缺陷檢測開展不是很多。
無人機的旋翼是其飛行的關(guān)鍵部件,操作者需要及時觀察各個旋翼的工作狀態(tài),因此旋翼印上了利于觀察的標識,以便操作者通過標識觀察無人機飛行中旋翼狀態(tài)。標識采用當前較為環(huán)保的移印方式印在旋翼上,旋翼外觀如圖1所示。

圖1 無人機旋翼外觀圖
旋翼在生產(chǎn)過程中,注塑機注塑完成后流入到移印環(huán)節(jié),然后烘干,外觀檢測。本文針對于無人機旋翼移印標識缺陷進行分析,使用機器視覺檢測與圖像分析技術(shù)相結(jié)合,將圖案不合格的旋翼挑選出來,現(xiàn)有的生產(chǎn)方式是采用人工挑選的方法,存在諸多弊端:挑選難度大,較小的缺陷無法挑選出來,對人員的要求高,檢測標準無法統(tǒng)一。
采用機器視覺檢測具有以下特點:1)缺陷種類檢測多;2)正常對接現(xiàn)在的生產(chǎn)流程,在生產(chǎn)環(huán)節(jié)即可進行分揀,并及時提出對移印設(shè)備的預警,及時止損;3)檢測過程標準統(tǒng)一,漏檢率低;4)減輕了勞動人員的工作強度,提高了檢測的效率[3]。
旋翼移印的缺陷種類大致有漏印、多印、錯印、少印,其中涂料過少導致圖層過薄,印油過多導致的圖層過厚或者出現(xiàn)印油疊加的印油漬點,屬于漏印、多印中比較特殊的情況。錯印則是在移印過程中由于旋翼旋轉(zhuǎn)的位置不在模具里面,印的位置與預期不一致。
1 機器視覺檢測平臺的搭建
視覺平臺主要由工業(yè)相機、光源、工控機、及視覺定位支架構(gòu)成。對于移印缺陷的檢測,根據(jù)旋翼的形狀選擇合適的光源[4]。根據(jù)旋翼的形狀,搭建的光源與相機布局如圖2所示。
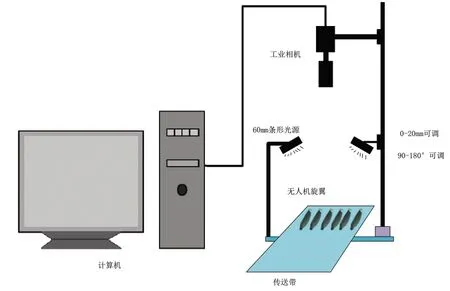
圖2 檢測平臺示意圖
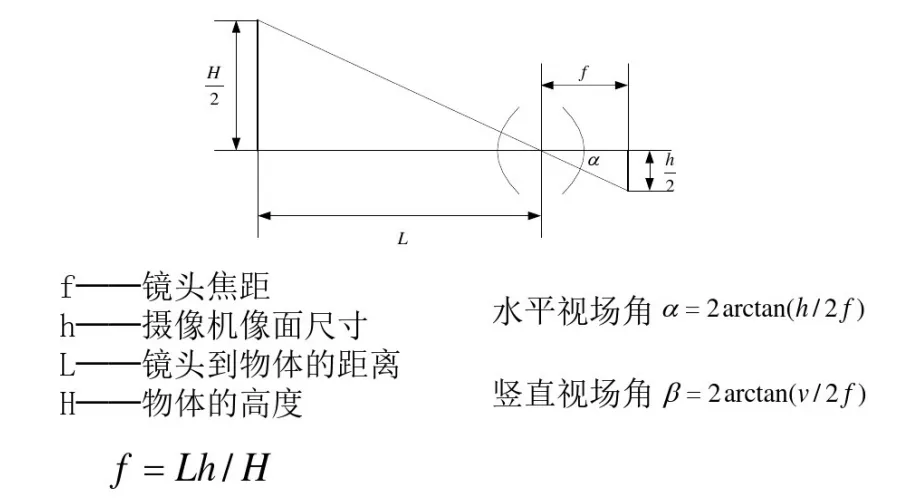
圖3 相機參數(shù)成像圖
1.1 光源的選型
視覺檢測系統(tǒng)中圖像的清晰度是核心[5],選擇合適的光源能夠保證圖像有足夠的像素質(zhì)量,能夠簡化算法提高系統(tǒng)穩(wěn)定性,一幅圖像像素過低會在一開始就覆蓋掉很多重要的特征點;出現(xiàn)陰影則會引起邊緣誤判;圖像不均勻則會導致閾值選擇困難。條形光源是由LED燈珠排布成長條形。多用于單邊或多邊以一定角度照射物體。突出物體的邊緣特征,照射角度與安裝距離有很大的調(diào)整空間,可以根據(jù)實際供需情況進行相應的調(diào)整。適用較大結(jié)構(gòu)被測物。主要應用于縫隙檢測[5],表面缺陷檢測,印刷檢測,輪廓檢測等等主要區(qū)別輪廓的工件。采用60mm的條形光源,角度方面90°~180°內(nèi)可調(diào),距離方面對向方向0~20mm可調(diào),左右光源亮度方面0~255可調(diào)節(jié)。由于機翼平面有一定的光滑度,機翼自身為黑色,圖層顏色為白色,具有很強的辨識度,所以該工件的光源亮度應在50~200內(nèi)可調(diào)。
1.2 相機和控制器選型
相機的選型對于其對于采集的圖像質(zhì)量影響很大,考慮本系統(tǒng)的可行性、穩(wěn)定性以及其實用價值,本次采用的相機型號為巴斯勒(Basler)工業(yè)相機,類型為線陣相機,可以保證極高的2D精度和超高的清晰度,配合其專業(yè)的計算機圖傳網(wǎng)卡[6-7],保證在60幀圖像質(zhì)量下也能也較高的圖像傳輸速率[8]。系統(tǒng)器件參數(shù)一覽表如表1所示。
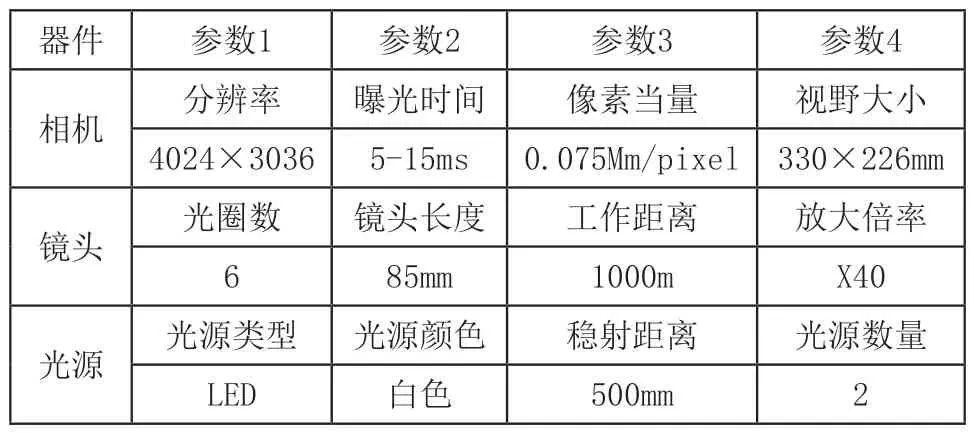
表1 視覺系統(tǒng)器件參數(shù)一覽表
2 軟件及算法設(shè)計
基于圖像分析缺陷檢測系統(tǒng)的設(shè)計首先將圖像分析和圖層檢測技術(shù)進行簡要概括,在應用中所使用的圖像處理主要有:灰度化、直方圖,BOOL分析、平滑圖像、圖像分割、連通域處理、邊緣檢測等。前期的主要處理是通過連通域的檢測,合格工件和不合格工件的面積差距是最明顯的特征區(qū)別,通過對連通域的區(qū)分,計算出特征區(qū)域的面積[9]。本文主要采用閾值分割方法,將圖層進行分割,加以二維直方圖進行信息修正,修復邊緣的平滑度,在檢測階段將噪點祛除[10-11]。對于選定區(qū)域,判斷區(qū)域的中心點,在檢測過程中,除了對于連通面積的判斷對比,還要對中心點進行判斷,進行再定位,最終判斷出測試工件和樣本工件之間的相似度,判斷其是否符合要求。
2.1 系統(tǒng)的搭建
通過光源、相機以及鏡頭的類型選擇,系統(tǒng)采用奧普特(OPT)視覺設(shè)備,采用配用的相機和鏡頭,PC或筆記本電腦作為控制端,采用OPT視覺開發(fā)軟件SCI軟件或OpenCV語言做圖像處理。
圖像處理的過程中,使用OpenCV作為基礎(chǔ)算法庫,結(jié)合C語言和Jscript腳本作為輔助語言[9]。通過對于現(xiàn)有基礎(chǔ)庫進行調(diào)整,對于工件的特定需求進行算法編寫,例如連通域效果的改進,對于整體算法的封裝使用,使得編寫過程中減少底層代碼的使用,使用SCI圖形化操作調(diào)用算法進行交互式處理,系統(tǒng)框架流程如圖4中所示。
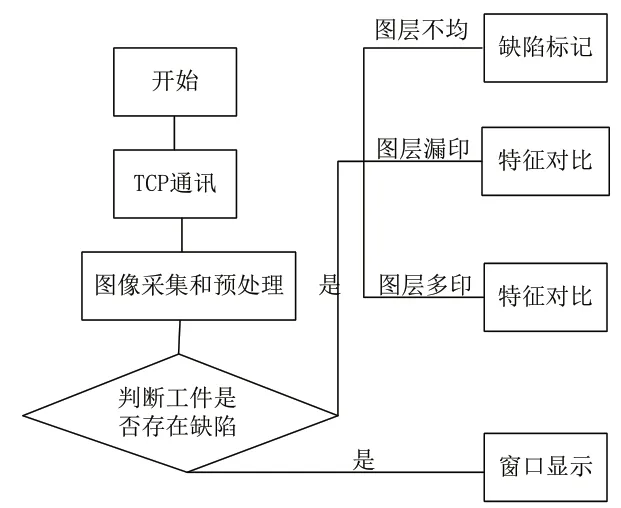
圖4 系統(tǒng)框架流程圖
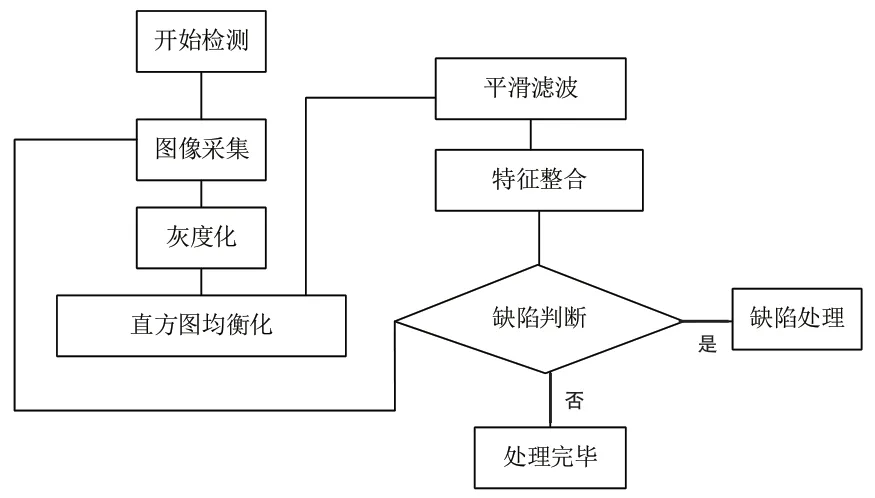
圖5 圖像處理算法流程
2.2 算法的選用與設(shè)計
由于采用工業(yè)相機采集圖像,保證圖像的清晰度,但是另一方面圖像的占用空間會很大主要特征明顯,但由于過于清晰,次要噪點也會更加清晰[12],在處理時,明顯的噪點會直接影響到檢測的直接結(jié)果,所以在圖像采集時,需要對圖像進行平滑處理,過濾影響不大的噪點。
圖像處理的開始是導入圖像信息,首先將采集的圖像進行灰度處理,灰度過程中使用加權(quán)平均值,獲得一張含有亮度的灰度化圖像,然后進行閾值分割,也是建立在單通道的灰度圖像上的,這是圖像處理中最基礎(chǔ)的一步。
令rk,k=0,1,2,…,L-1表示一幅L級灰度數(shù)字圖像f的非歸一化直方圖定義為:
式中,nk是f中灰度為rk的像素的數(shù)量。f的歸一化直方圖定義為:
式中,M和N分別是圖像的行數(shù)和列數(shù)。對于k的所有值,p(rk)的和總是1。
如圖6所示,左圖是經(jīng)過打光處理的彩色圖,右圖為不經(jīng)過處理的黑白圖,可以很清晰的看到左圖處理可以看到圖層的周邊的噪點,還可以看到旋翼標識自身的表面特征,有較多磨砂類型的凹凸特征,在處理過程中會存在一定的影響,底部統(tǒng)一進行了遮光處理,保證相機的視野內(nèi)部只有工件特征,精確結(jié)果。
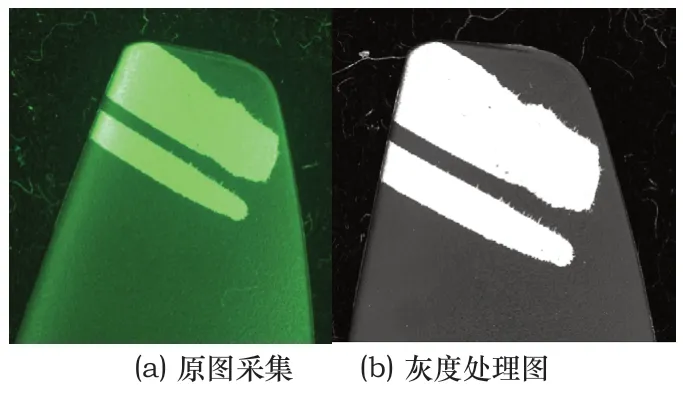
圖6 圖像灰度處理
圖7中可以看出,圖像本身有許多噪聲干擾,邊緣像素進行淡化處理非常必要,由于每一個工件的特征信息都不相同,所以前期要選擇盡可能多的工件進行設(shè)置,比較多種濾波的處理結(jié)果,對于濾波的內(nèi)核進行大小的調(diào)整,觀察圖像結(jié)果。
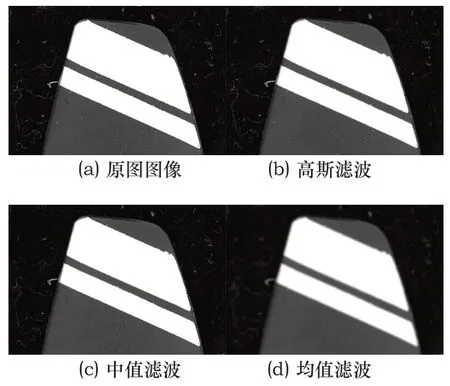
圖7 圖像不同濾波處理的效果圖
綜合以上幾種濾波處理,高斯濾波的處理結(jié)果和原圖無明顯差距,中值濾波處理了一些噪點,均值濾波雖然將噪點全部處理完畢但是整體圖像的清晰度不足,特征點模糊,所以綜合來看,該工件的平滑處理,使用中值濾波比較合適,通過調(diào)整測試像素周圍鄰域像素集中的中值,去除大部分的椒鹽噪聲和斑塊噪聲[13]。
2.2.1 連通域處理
通過中值濾波基本處理了圖像的內(nèi)部噪點,在對灰度圖像進行二值化處理,使用Otsu算法計算圖像的數(shù)值,然后在對圖像的黑白區(qū)域進行分割,為獲取二值圖像提取工件的缺陷信息作鋪墊[14],對連通域的處理可以進行判別出工件的缺陷與否,系統(tǒng)的處理流程如圖8所示。
對于算子的選用,根據(jù)旋翼的特性本文采用對比方法進行效果分析。
1)使用Roberts算子,可以從圖9中看出,該算子的檢測結(jié)果相對明顯,整體上可以反映圖層的輪廓邊緣,但是邊緣的清晰度較低,細化特征比較明顯,容易在后續(xù)的處理中容易被處理掉一些重要的特征。

圖9 Robert 算法處理
2)Sobel算子和Laplace算子的檢測結(jié)果,相對于Robert算子來說,兩者算法的邊緣細節(jié)增多,但無法嚴格區(qū)分主體與背景,背景的噪點也被當做邊緣處理了,但整體的圖層輪廓基本符合要求,清晰度和邊緣寬度都很明顯。
3)Canny的檢測結(jié)果,圖像邊緣現(xiàn)象明顯,輪廓清晰。可以通過閾值調(diào)整,避免出現(xiàn)冗雜的邊緣信息,檢測過程中受噪聲感染微弱,能檢測到真正的比邊緣信息,但是檢測的細節(jié)過多,還是存在由于細節(jié)邊緣導致檢測失真的情況,可以通過不斷調(diào)整閾值,調(diào)節(jié)邊緣輸出效果。
通過幾種不同算法的處理,對于原始圖像處理后的平滑圖像進行在處理,對于灰度圖像進行閾值分割,選取最佳像素中值,進行輪廓的提取。由幾種算法的對比圖可得:經(jīng)典的邊緣檢測都可以檢測到標識圖層的輪廓和邊緣。
2.2.2 特征提取
Blob分析是一種對閉合目標形狀進行分析處理的基本方法,Blob算法的核心思想是在一塊區(qū)域內(nèi),把出現(xiàn)“灰度突變”的范圍找出來[15]。對于檢測的圖像,整體范圍的像素點構(gòu)成一張二維數(shù)據(jù)網(wǎng),圖上的檢測特征為數(shù)據(jù)圖中的區(qū)域點,Blob的算法就是要把這些區(qū)域找出來,并確定其大小、形狀,中心、重心、面積等可輸出數(shù)據(jù)的算法,把所有的像素點作為檢測范圍,當系統(tǒng)內(nèi)部的光源打到工件上面,工件上的缺陷像素和周圍像素會形成相對明顯的反差,在檢測中就可以將反差較大的區(qū)域劃范為一個部分,特征提取效果如圖10所示。
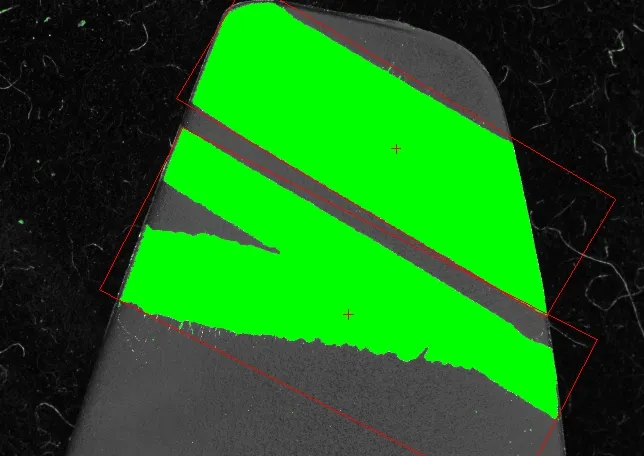
圖10 特征提取
2.2.3 相機的標定
標定是實現(xiàn)準確測量和獲取準確位置信息的基礎(chǔ),其主要作用是建立圖像像素尺寸與實際尺寸的關(guān)系、以及建立圖像坐標系與世界坐標系的映射關(guān)系。使用標定板標定待檢測工件,通過建立標定無已知的點與其圖像之間的對應,利用算法在2D平面內(nèi)獲取相機的模型,檢測精度高維護簡單,外加工業(yè)相機的高清晰度,可以保證其精度。
本次標定板采用30×30mm的標定板,如圖11所示,內(nèi)置的實心原點等半徑、等間距,左右點之間1mm,將工件和標定板同時放在同一個相機視野內(nèi),通過點位標定,求取標定板上任意兩點的像素距離,點的實際距離,就可以求取像素當量。
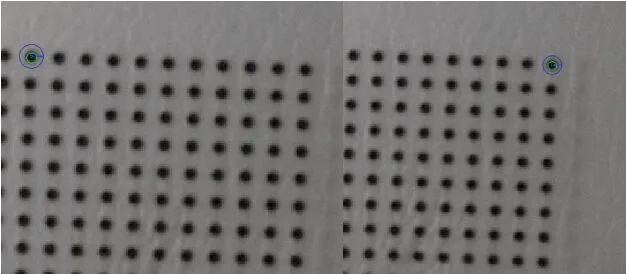
圖11 像素當量
使用圖像處理中的找圓形處理,找到任意兩點(本次采用的間距的10mm,方便計算),通過算法計算,最終求得像素當量,如圖12所示。
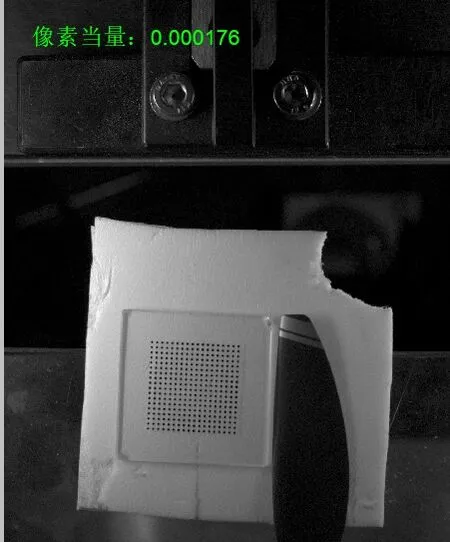
圖12 像素當量計算
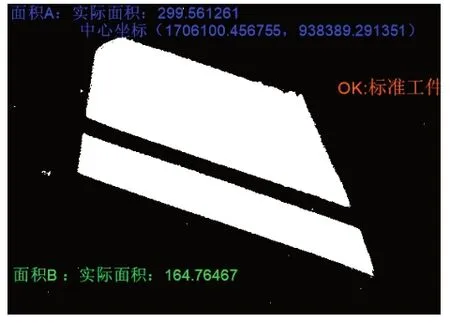
圖13 標準工件檢測
通過像素當量的計算,可以結(jié)合之前的工件處理,對于已檢測到的像素面積,通過像素當量,求得實際面積,就可以直觀的觀察到工件的具體缺陷了。
由以上算法和像素當量的綜合計算,求比出各種缺陷工件之間的連通域關(guān)系,從而進一步判斷出工件的缺陷形式以及缺陷程度,通過設(shè)置閾值判定檢測結(jié)果。
3 實驗測試
經(jīng)過以上的算法設(shè)計,在測試階段,將已知工件劃分為合格工件、缺漏印、多印三個部分,特征識別采用Blob分析和直方圖統(tǒng)計,Blob分析根據(jù)灰度、紋理、彩色等圖像特征相似像素點的連通性,進行特征分析,計算工件表面涂層的連通域面積,通過對比與樣本工件的數(shù)據(jù),求取差值,計算測試數(shù)據(jù)的缺陷概率,從而判斷移印質(zhì)量。
通過對于實驗樣本數(shù)據(jù)的分析,可以在視覺方向上觀察到的工件的待檢測面積和缺陷面積的像素數(shù)據(jù)和實際數(shù)據(jù),以及判斷工件待檢測區(qū)域的缺陷程度,做出相應的缺陷判斷,如圖14所示,達到了預期目標。
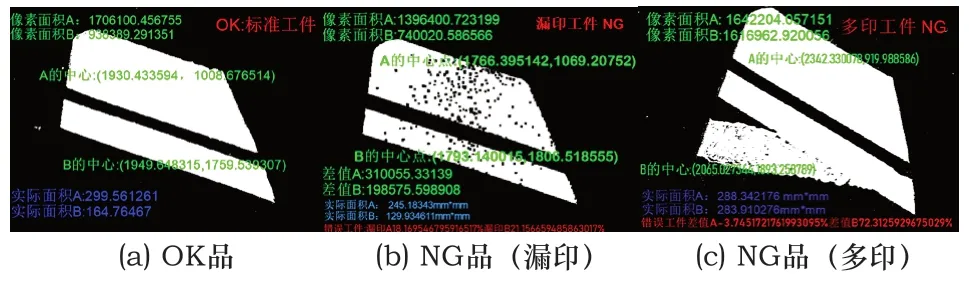
圖14 缺陷檢測及識別結(jié)果
3.1 實驗數(shù)據(jù)分析
由于工件自身存在一定的弧度,受到光源影響和傳送過程中晃動的影響,會產(chǎn)生一些微畸變,在一定程度上會影響到相機的檢測數(shù)據(jù),對于工件進行一個數(shù)據(jù)可行性分析可有效地避免畸變的影響。
通過使用棋盤格對工件進行多次數(shù)標定,測量像素當量下,相機所測量的尺寸和棋盤格的實際尺寸的線性關(guān)系,判斷相機畸變的良率,最終得出實驗結(jié)論。
通過分析圖15中的80組數(shù)據(jù),分別是從1PU-5PU(PU:單位像素進行測量)從數(shù)據(jù)分析的曲線波動來看,相機的1PU 和5PU的測試距離出現(xiàn)波動較大,這是桶型和枕頭畸變的結(jié)果,相機圖像的中心或者圖像的邊緣會出現(xiàn)較大的像素浮動。
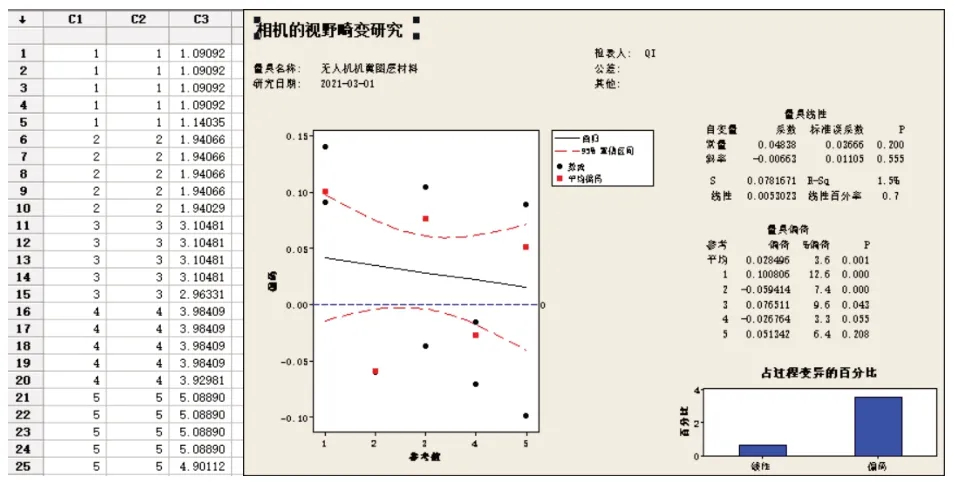
圖15 相機的視野畸變
3.2 實驗結(jié)果分析
通過對于整體的數(shù)據(jù)分析,1PU、5PU的數(shù)據(jù)波動在PU±0.036的數(shù)值之間波動,2PU、3PU、4PU數(shù)值在±0.026的數(shù)值之間波動,屬于可接受畸變的范圍。通過對于整體數(shù)據(jù)進行數(shù)據(jù)的可想性分析,可以進一步判斷數(shù)據(jù)的未來走向是屬于線性還是非線性的。
線性可行性分析,通過對于25組檢測數(shù)據(jù)和線性回歸σ的值進行線性偏移的研究,從數(shù)據(jù)中可以得出結(jié)論,數(shù)據(jù)的整體走向線性百分率低于1%,整體數(shù)據(jù)不會存在線性變化,檢測過程中數(shù)據(jù)只會在基于標準值進行上下浮動,并不影響最終的檢測結(jié)果。
3.3 分揀系統(tǒng)
系統(tǒng)搭建完成后,能夠快速地將旋翼的缺陷識別出來。識別出來的結(jié)果通過計算機的串口發(fā)送中心位置及產(chǎn)品結(jié)果信息,通過工業(yè)機器人實現(xiàn)快速分揀。
4 結(jié)語
工業(yè)相機及光源的選擇對移印標識的缺陷檢測非常重要,旋翼的弧形在成像時容易造成視野的畸變,通過對像素的標定,能夠有效地減少畸變造成的影響。本文對于移印標識的檢測系統(tǒng)搭建,運用Blob算法和特征提取,能夠快速地分辨出漏印、多印等不良產(chǎn)品。通過對實驗室的數(shù)據(jù)分析,準確率較高,能夠通過軟件將缺陷產(chǎn)品識別出來,通過串口通訊與工業(yè)機器人配合能夠有效地分揀出缺陷產(chǎn)品,減少了人力成本,提高了生產(chǎn)效率,降低了缺陷品流入市場的風險。系統(tǒng)的搭建模型及應用算法設(shè)計可以為其他的缺陷檢測提供參考,在機器換人的制造業(yè)轉(zhuǎn)型中應用廣泛。
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2019年9期)2019-11-25 07:34:36
中學生數(shù)理化·七年級數(shù)學人教版(2019年9期)2019-11-25 07:34:34
中學生數(shù)理化·七年級數(shù)學人教版(2019年12期)2019-05-21 02:53:50
中學生數(shù)理化·七年級數(shù)學人教版(2019年12期)2019-05-21 02:53:48
