基于改進三維塊匹配濾波的紅外全息降噪算法
2023-11-17 07:18:18李亞軒張永安王俊迪郗加民張云浩楊永浩
激光與紅外 2023年10期
李亞軒,葉 飛,張永安,王俊迪,郗加民,張云浩,楊永浩
(1.昆明理工大學理學院,云南 昆明 650500;2.云南省現代信息光學重點實驗室,云南 昆明 650500;3.昆明榮者光電科技發展有限公司,云南 昆明 650500)
1 引 言
數字全息技術是一種將傳統光學全息技術與數字圖像技術相結合的技術,因其可以記錄和顯示物體的三維信息并且易于使用,在眾多領域中得到了廣泛的應用[1]。隨著數字全息技術在更加廣泛領域的應用[2],紅外全息檢測技術也發展起來。紅外全息技術對比可見光全息技術有著光源能量高[3]、光源波長對抗復雜環境能力強、相干距離長、干涉能力穩定的優點[4];使得紅外全息有不易受可見光干擾[5]、穿透煙霧火焰能力強[6]、對實驗穩定性要求低[7]、長距離大目標成像能力強[8]的優點。使其成為解決無損檢測[9]與火場救援[10]等現有難以解決領域的最優方法。
紅外全息技術作為全息技術與紅外技術[11]的分支,在長距離傳播時會使光線能量衰減嚴重,到達物光系統中的焦平面能量低,導致圖像質量較差,圖像噪聲復雜,影響后續處理[12]。針對紅外全息圖進行圖像處理的需求也在逐步增長,而對于紅外全息圖的傳統圖像處理方法主要集中于對噪聲的抑制;如在2016年王洋等人通過在整幅圖像中尋找與噪聲點具有結構相似的像素區域作為濾波區域,將圖像中噪聲點進行濾波放到整幅圖像中進行考慮,這種非局部均值濾波方法能夠對紅外圖像的高斯噪聲進行降噪,同時使得濾波后圖像信息失真程度低,該算法能夠在對噪聲進行良好抑制的同時具有較好保持邊緣信息的性能[13]。2017年,張勇提出了一種基于動靜態檢測算法的紅外圖像降噪算法。通過一種動靜態檢測算法將圖像分成動態圖像和靜態圖像,用改進的自適應維納濾波算法處理動態圖像,用改進的非局部均值(NL-means)降噪算法處理靜態圖像,并用現場可編程門陣列實現紅外圖像降噪系統設計。其峰值信噪比(Peak Signal-to-Noise Ratio,PSNR)和細節方差-背景方差比(Detail Variance -Background Variance,DV/BV)均高于經典降噪算法,該算法能有效減少圖像中的高斯白噪聲,并能很好地保持圖像的邊界細節信息[14]。2017年,為了消除紅外全息中顯著的散斑噪聲,劉寧提出了一種基于使用拉普拉斯金字塔技術,并在每層上進行雙邊濾波器以區分噪聲和細節信息。從而對紅外數字全息圖散斑噪聲進行抑制的新技術;由于雙邊濾波器無法區分所有噪聲,因此設計了一個改進的中值濾波器來過濾剩余噪聲。該技術在噪聲抑制中的紅外數字全息圖上有效工作,從而去除了紅外全息圖像中大多數的散斑噪聲[15]。2018年,國外Bianco,V.使用多種聯合三維塊匹配濾波(MLDH-BM3D),這是一種特別適合過濾數字全息(Digital Holography,DH)圖像的方法;它將多個DH捕獲與三維塊匹配濾波算法(Block-Matching and 3D Filtering,BM3D)相結合,利用對象特征的非常稀疏表示而設計的一種數字濾波器;這種方法對全息圖像中的散斑噪聲與高斯白噪聲有很好的抑制效果,能夠使紅外全息圖像實現了無噪聲數字全息重建[16]。而這些對于紅外圖像的降噪方法對紅外全息圖像降噪得到結果的信噪比較低并且細節缺失嚴重[17],并且其運算效率與圖像質量也存在不足。而BM3D作為較為優秀的降噪方法[18],在紅外全息圖像處理中,利用BM3D算法的特點對圖像中的高斯噪聲與散斑噪聲同時處理能夠得到對圖像進行更好的降噪處理[19],但是其對細節的保留與對紅外圖像的適應性較差,需要對BM3D算法的各個部分進行改進使其適用于紅外全息圖像的降噪處理。
本文基于三維塊匹配濾波算法對紅外全息圖像的降噪原理,提出了一種對高斯噪聲尤其是加性高斯白噪聲與紅外全息圖散斑噪聲同時進行處理,提升濾波算法的對細節的保留與對紅外全息圖像的適應性,得到針對紅外全息圖像得到更好降噪效果的改進三維塊匹配濾波算法,通過與現有傳統方法進行對比來驗證算法的性能。
2 基本原理
2.1 紅外全息圖記錄與噪聲分布
紅外全息技術是基于數字全息技術與紅外技術結合的全息技術。紅外全息技術的基本原理與可見光波段的激光為光源的全息技術基本原理相同,都是對全息基本原理的運用,即對波前信息的采集記錄與重構再現。
紅外激光由于波長在760 nm以上,不能被肉眼觀察到;為了收集紅外全息圖,基于馬赫-曾德爾(Mach-Zender)干涉光路對紅外全息光學裝置進行改造,使用綠光作為引導與紅外光進行擬合,使紅外光與綠光通過分束鏡所分束的兩束光的光路相同,通過綠光的可見的干涉條紋來判斷紅外條紋的清晰程度,紅外全息光學裝置如圖1所示。

圖1 紅外全息光學裝置
其中,紅外全息實驗所使用的激光器是中心波長為1064 nm的在連續模式下工作的半導體紅外激光器及波長為632.8 nm的He-Ne激光器,其中He-Ne激光器用于與紅外光擬合后引導光路搭建;紅外激光最大功率為115.3 mW,橫模模式為TEM00,發出光束發散角為1.5 mrad,光束直徑為1.329 mm,相干長度為20 cm。使用的光學鏡片均為普通透紅外透鏡,分束鏡Ⅰ分光比為1∶2,分束鏡Ⅱ分光比為1∶1,擴束鏡放大倍率為25倍,針孔尺寸為10 μm。本文選用CCD分辨率為1920×1080,像素尺寸為2.9 μm,曝光時間設置為0.2 ms,再現距離為104.5 mm。樣品為投射式樣品“光”字,材質為黑色不透光的亞克力板(如圖2),規格為50 mm×50 mm,厚度為3 mm,字大小20 mm×15 mm,字筆畫寬度為2.5 mm。
圖2 透射式樣品“光”圖像
在數字全息測量系統記錄過程中,當激光照射到物體表面時,由于激光的高相干性,任意物點的散射光與其他物點產生的散射光發生干涉,從而形成了無規則分布的散斑圖樣,這種噪聲被稱為散斑噪聲[20]。
在數字全息系統中,散斑噪聲往往被看作是降低全息再現像質量的一種乘性光學噪聲。[21]數字全息記錄過程中,設散射面上有N個獨立散射點源,散射表面上隨機散射點q(x,y),此時接收面P上基元光波的復振幅為:
E(P)=α(x,y)exp[jφR(x,y)]exp[jφ(r)]
(1)
式中,α(x,y)為散射表面反射光的振幅;φR(x,y)表示散射表面不平整所引入的隨機相位;φ(r)表示光傳播相位因子。
接收面P的復振幅由N個獨立散射點源光波傳播到該點的疊加。此時P點散斑噪聲引起的光強變化表示為:
I(P)=|E(P)|2=
(2)
全息圖上記錄面上光強分布為:
I(x,y)=U(x,y)U*(x,y)=|O|2+|R|2+O·R*+R·O*+IR(P)
(3)
式中,O與R分別代表物光與參考光;IR(P)代表噪聲引起的光強變化。按下式計算:
IR(P)=I(P)+IGauss(P)
(4)
式中,I(P)為散斑噪聲所引起的光強變化;IGauss(P)為高斯噪聲等其他環境因素所引起的光強變化。
2.2 三維塊匹配濾波算法
三維塊匹配濾波算法(BM3D)借鑒了非局部均值方法的非局部塊匹配思想[22],通過將相似判定的二維圖像塊找出作為參考塊,再將其通過三維變換組合成三維群組并對群組進行協同濾波處理,最后將處理后的塊聚合到原圖像塊位置得到更好濾波結果的傳統降噪算法[23]。BM3D濾波算法的過程由兩個階段所構成,即初步估計階段與最終估計階段,每一階段由塊匹配、協同濾波與聚合三部分構成,如圖3所示。
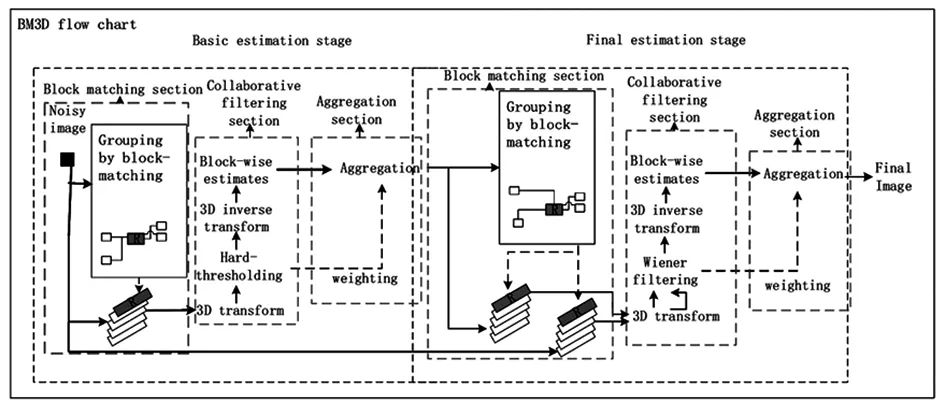
圖3 BM3D流程圖
如圖3中初步估計階段為基礎估計。首先是進行按塊估計,對于噪聲圖像中的每一個塊,首先利用塊匹配參數找到所有與圖像相似的相似塊,塊與塊之間的匹配度可以表示為這些系數的均分誤差,即:
(5)
(6)

(7)
然后通過相似判定將相似的二維圖像塊三維變換組成三維群組作為塊匹配(Block-matching)。隨后進行協同硬閾值濾波處理,對三維群組通過硬閾值濾波進行降噪,再進行三維反變換得到所有分組的塊估計,并將其返回初始位置。BM3D算法中使用的為硬閾值處理,利用硬閾值濾波來對圖像進行初步估計,估計可用式(8)計算得到:
(8)
(9)

(10)
最終估計階段為使用基礎估計后進行改進的分組操作與協同維納濾波。通過按塊估計,對于每一個塊的分組上,使用基礎估計中得到的塊進行塊匹配(BM)找到與當前處理塊近似的所有塊的位置,使用這些位置形成源于噪聲圖像與基礎估計的兩個數組,對上述兩個數組進行三維變換。隨后利用協同維納濾波處理,使用基礎估計的能量譜對原始噪聲圖像進行維納濾波,對濾波后的三維系數進行三維逆變換來生成所有分組塊的估計,并將其返回初始位置。最后將加權平均對所有局部估計進行聚合,計算出真實圖像的最終估計。即為:
(11)

(12)
2.3 改進BM3D算法
為了使BM3D算法更好應用于紅外全息圖像的降噪,采用對硬閾值濾波和維納濾波同時改進的方式來改進BM3D算法。
由于硬閾值濾波需要對每一個塊進行計算,而圖像噪聲和細節擁有一定的相似度,會導致降噪的同時出現細節的丟失。在硬閾值濾波前可先利用傅立葉閾值和再濾波對圖像中的細節信息進行增強,從而將細節信息與噪聲區分開來。然后再濾波,在實現去噪的同時對細節信息的有效保留。

(13)
(14)
其中,aΔ為3σ檢驗,F表示傅里葉變換:
(15)

z1=g(xi,yi)*z
(16)

(17)
(18)
(19)

(20)
(21)
(22)
通過改進BM3D中硬閾值部分與維納濾波部分,使得BM3D算法對紅外全息圖像的適應性與濾波效果提升,并且其保留較多的細節,能夠更好的對紅外全息圖像中的噪聲進行降噪處理。
3 實驗驗證
為驗證本文提出方法的有效性,選用傳統BM3D濾波、非局部均值濾波、自適應維納濾波和傳統BM3D濾波作為對照組,與本文的改進BM3D對比。實驗中使用實拍紅外全息圖像(圖4)的濾波結果與模擬的潔凈環境下紅外全息圖像(圖5)進行了對比,使用峰值信噪比(PSNR)與結構相似性指標(Structural Similarity Index Measure,SSIM)作為濾波效果優劣的評判標準。
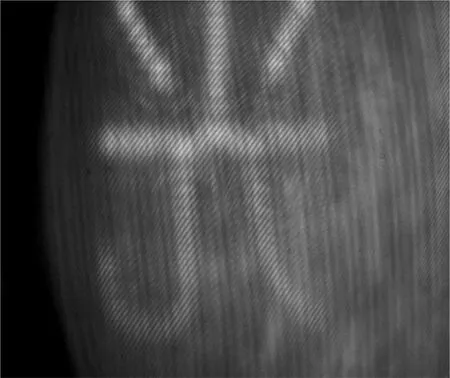
圖4 實拍紅外全息圖像
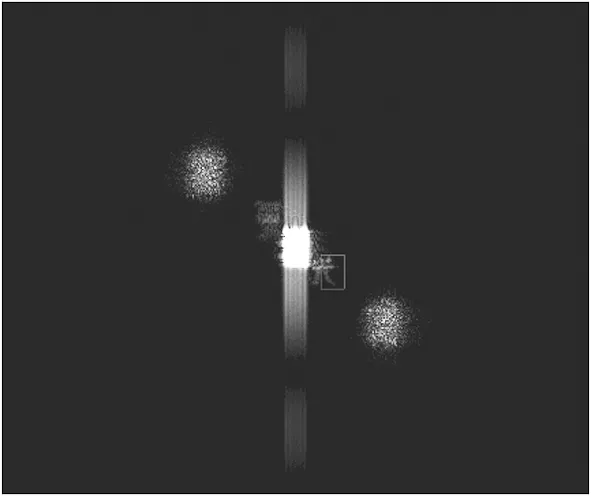
圖5 實拍圖像再現像
圖4為圖1所示的紅外光學裝置對透射式樣品在大場景下的紅外全息圖像,模擬了在大場景下所呈現的具體圖像,與可見光全息對比,紅外技術對于大視場全息效果更好。圖5為實拍圖像的再現像,可以看出除了理想環境下的正負一級與零級像外,還存在其他部分的圖案,這些圖案就是全息成像時存在的環境噪聲與乘性散斑噪聲。圖6為添加噪聲方差0.02的乘性噪聲后的紅外全息圖像,模擬了復雜環境下噪聲對紅外全息圖像的影響。圖7為圖6圖像的紅外全息圖像再現像,可以看出噪聲部分明顯變亮并影響了圖中再現像“光”的分辨率,其證明噪聲對紅外全息圖像無論是原始圖像還是再現像都有所影響。
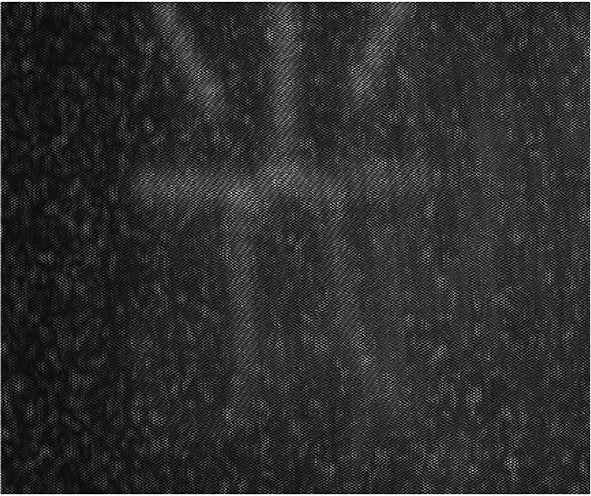
圖6 添加噪聲方差0.02的乘性噪聲紅外全息圖像
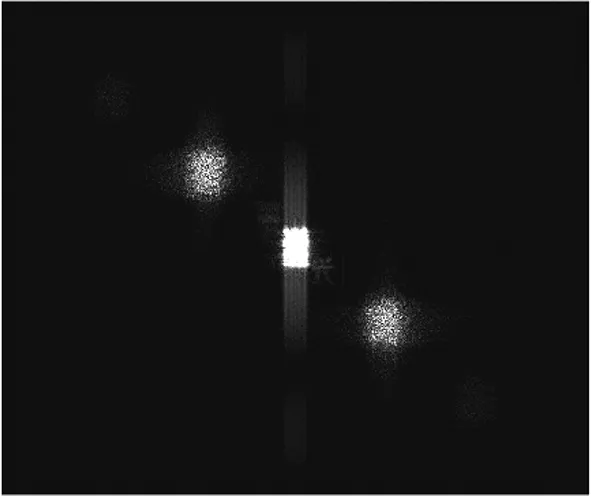
圖7 添加噪聲后紅外全息圖像再現像
為了檢驗改進算法針對不同類型噪聲的降噪效果與算法性能,本文在采集的全息圖中人工添加了不同強度的乘性噪聲(包括高斯白噪聲與乘性散斑噪聲),并對其進行了降噪處理。圖8中,由上至下,各行圖像添加了噪聲方差為0,0.02,0.05,0.2,1的乘性噪聲;自左向右,各列圖像所采用的降噪方法分別為3×3鄰域濾波、自適應維納濾波、BM3D濾波和改進BM3D濾波。從圖8中可以看出,隨著噪聲方差的增大四種方法的降噪效果均有所下降。其中,3×3鄰域濾波與BM3D濾波的降噪效果在噪聲方差等于0.05時明顯下降。自適應維納濾波與改進BM3D濾波降噪效果則變化較小。當噪聲方差達到0.2時,由于3×3鄰域濾波與BM3D濾波的降噪性能不足以去除大多數的噪聲,對于BM3D濾波方法當增加性能則時也會導致塊匹配部分過度整合的問題;上述問題使得3×3鄰域濾波與BM3D濾波降噪后的圖像完全看不到圖中的“光”,表明此時這兩種濾波已無法實現有效降噪。自適應維納濾波降噪后的圖像,在方差為0.8時,雖能看清“光”字,但圖像清晰度已有明顯下降;在方差為1時,自適應維納濾波會同時對圖像與噪聲產生過度抑制,使得圖像清晰度大幅下降,僅部分“光”可隱約看到。表明該方法降噪效果優于前兩種方法。改進BM3D濾波的降噪圖像隨著噪聲方差的增大,圖像對比度及“光”字清晰度均有所降低,但圖像質量下降小,即使噪聲方差達到1仍然可以清晰看到圖像中的“光”。表明改進BM3D濾波算法可以在降噪的同時有效保留原圖像中細節信息,降噪效果明顯優于其它三種降噪算法。
圖9為采不同濾波方法的PSNR值數據圖。自適應維納濾波與改進BM3D濾波在噪聲方差0.05時其PSNR值變化較小;而在噪聲方差為0.2時,自適應維納濾波的PSNR出現了明顯下降,當噪聲方差達到1時,其PSNR值已經下降至25以下,表示此時圖像質量已經出現明顯的下降,不能很好的分辨圖中的細節,但依然優于前兩種方法。改進BM3D濾波的PSNR值隨著噪聲方差的變大逐漸減小,表示其圖像的分辨率也有所降低,但是其下降的幅度較小并且下降曲線較為平穩;在0.02噪聲方差之后其PSNR值沒有出現大幅度變化,即使在噪聲方差為1時PSNR仍然保持在40左右;通過PSNR值得變化,證明改進BM3D濾波可以在降噪的同時能夠有效的保留圖像的細節信息,降噪效果明顯優于其他三種降噪方法。
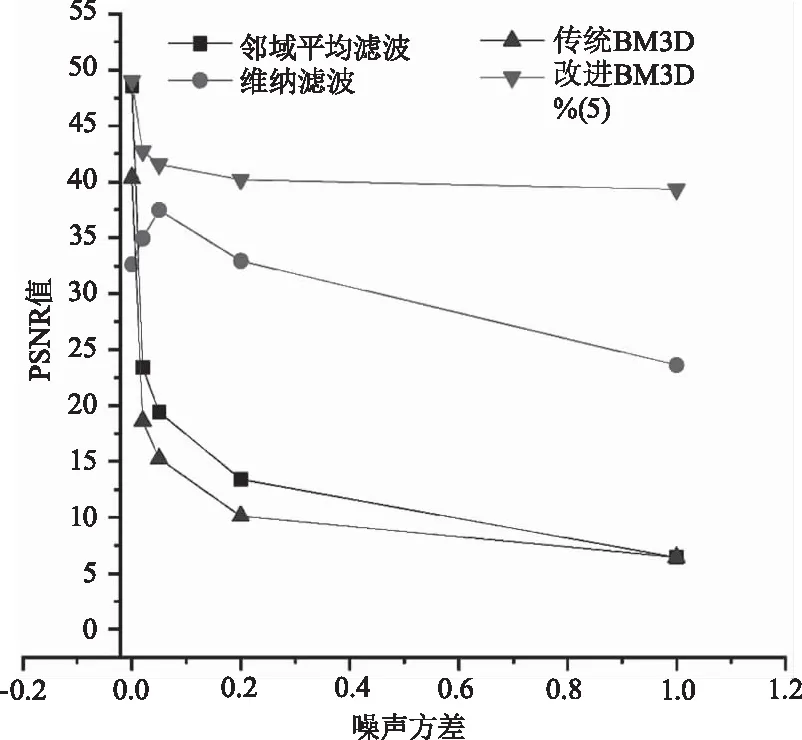
圖9 不同濾波方法的PSNR值數據圖
圖10中(a)為非局部均值濾波對紅外全息實拍圖的濾波后的再現像圖像,通過再現像可以觀察到非局部均值濾波算法對再現像中的噪聲沒有很好的去除效果,其對紅外全息中的乘性噪聲與環境噪聲降噪效果不是很理想。(b)為自適應維納濾波對紅外全息實拍圖的濾波圖像后的再現像圖像,圖像噪聲有部分除去但依然有噪聲的殘留,字體較為清晰可見。(c)與(d)分別為傳統BM3D濾波與改進BM3D濾波對對紅外全息實拍圖的濾波后的再現像圖像,圖像中噪聲降噪效果較好,可以表明這兩種濾波已可以對絕大多數環境噪聲與散斑噪聲進行有效的降噪。而對于“光”字體,傳統BM3D濾波的成像效果明出現有部分模糊,其對再現像的細節的保留不夠;而改進性BM3D濾波的再現像可以清晰可見的看到圖像中的“光”且噪聲去除程度較大。表明改進BM3D濾波算法可以在降噪的同時有效保留原圖像中細節信息,降噪效果明顯優于其它三種降噪算法。

圖10 不同濾波方法對原始圖像的降噪后的再現像
4 結 論
紅外全息圖像由于紅外全息技術圖像的環境噪聲和散斑噪聲較大的缺點,而目前的降噪方法無法滿足降噪需求,所以本文提出通過引入全局傅立葉閾值和再濾波技術與自適應維納濾波對BM3D降噪方法改進,使其能夠對紅外全息圖像進行降噪。通過對比現有方法降噪效果利用PSNR與SSIM進行質量評估來驗證,并通過全息再現像圖像中噪聲區域與物體區域的比對,證明改進三維塊匹配技術能夠對紅外全息圖像降噪得到更好的圖像與再現像并且保留更多圖像細節。