基于無人機純方位無源定位的研究
2023-11-19 09:20:42劉佳李宜超
電子制作 2023年21期
劉佳,李宜超
(濰坊理工學院 大數據學院,山東濰坊,262500)
1 研究概述
隨著時代與科技地飛速發展,無人機的應用逐漸滲透到我們生活中地各個領域,如民事領域中的航拍、微型自拍、救災救難、快遞運輸、跟拍野生動物、測量測繪、生活娛樂等;軍事領域中的偵察機、靶機等,及大力度拓展的無人機的使用用途,許多發達國家都在積極地發展研究無人機的相關技術。
無人機的遙控原理一般就是利用地面的發射機把有關控制的電信號進行編碼,經過紅外調制、調幅或無限調制,把信號轉換成無線信號發送給無人機。無人機接受信號后,把接收到的無線電波在進行一系列的放大解碼等操作,獲得最初的控制信號,然后將信號傳給相關的元器件進而實現無線控制。但無人機群在進行遂行編隊飛行時,為了減少或避免外界信息的干擾,都盡可能地保持電磁靜默,盡量地少向外發送電磁波信號[1]。因此需要使用純方位無源定位的方法來實現對無人機位置的調控,也就是說由編隊中的一架或多架飛機發射信號,其余的無人機進行信號的接收,從接收的信號中提取出方向信息進行定位,從而調整無人機的位置[2]。本文根據無人機的編號以及無人機地在編隊中相對位置保持不變,建立數學模型解決以下問題:
(1)當位于中心的無人機(FY00)和其他二架無人機發射信號進行定位時,其他接收信號的無人機的位置有所偏差時,如何進行定位的問題;
(2)在只有中心無人機(FY00)和圓周上最多三架無人機發射定位信號的前提下如何進行調整方可使九架無人機均勻分布在圓周上的問題;
(3)當無人機集群是特定位置編隊隊形(例如:錐形)時該如何設計無源定位的調整方案的問題。
在研究上述問題中,本文基于以下三點假設:
(1)本文僅考慮在無外界各種因素干擾下進行的信號發射;
(2)文中每個無人機保持勻速飛行且位于同一平面上,位置相對靜止,無外界因素干擾;
(3)本文只考慮無人機收到信號進行定位。
本文的總體分析流程圖如圖1 所示。
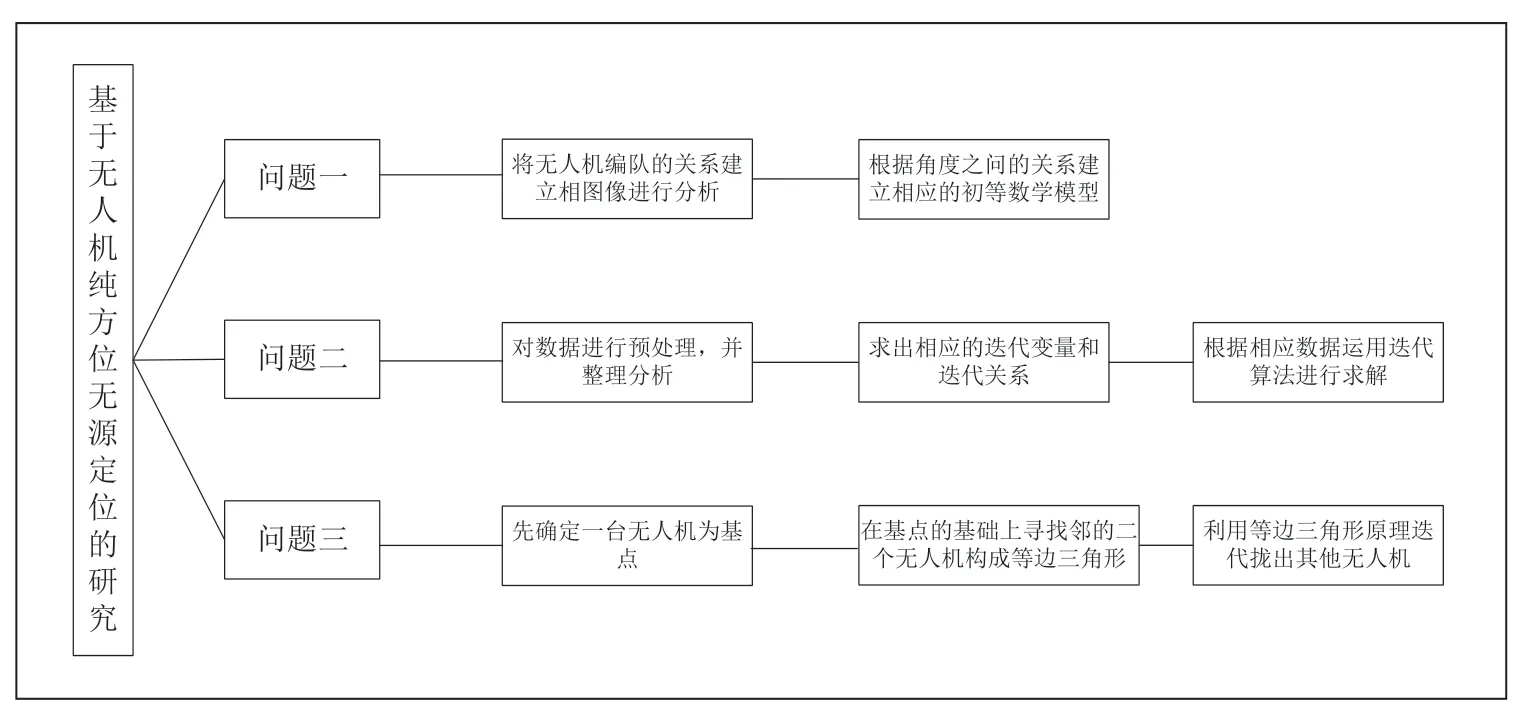
圖1 總體分析圖
2 無人機定位問題
為了解決當位于中心的無人機(FY00)和其他二架無人機發射信號進行定位時,其他接收信號的無人機的位置有所偏差時的定位問題如圖2 中8 所示。本研究通過發射信息無人機與接收信號無人機所形成的夾角進行分析得到標準角度信息,再通過發送標準信息實現無人機位置有效調整,并基于三角函數理論進行分析,進行無人機位置的定位。
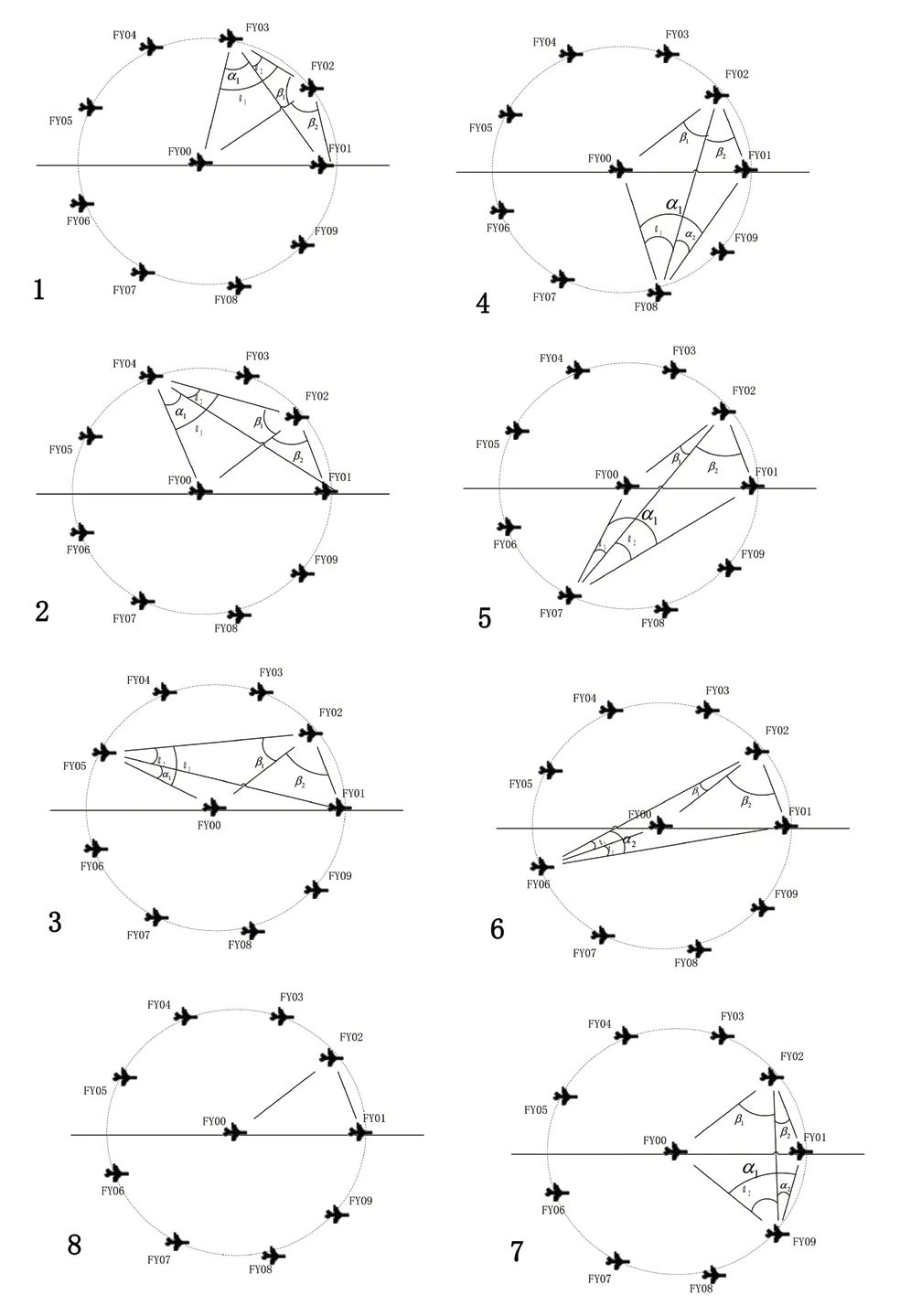
圖2 定位圖
在無人機進行圓形編隊飛行時,無人機均勻分布在圓周上,且利用自身感知高度信息,使無人機均保持在同一高度飛行的情況下,可以分析出無人機的標準位置信息,通過發射信息無人機與接收信號無人機所形成的夾角進行分析得到標準角度信息。通過發送標準信息實現無人機位置有效調整,并基于三角函數理論進行求解,得到了可以利用公式(1)進行有效定位。
注:α1為無人機FY00 和其一已知無人機與矯正無人機夾角;α2為無人機FY00 和另一已知無人機與矯正無人機夾角;1β 為無人機FY00 和矯正無人機與其一(中間)已知無人機夾角;β2為矯正無人機和另一無人機與其一(中間)已知無人機夾角;β3為1β 和 β2的角度和。
首先根據已知條件確定FY00 與另外兩架無人機FY0M、FY0N(0 假設以無人機FY00 與FY01、FY02 為發射信號無人機,確定發射信號無人機后對剩余飛機開始實行逐個依次定位。 在對整個問題進行分析求解之前,首先對大問題進行拆解,拆解成多個小問題,對小問題進行逐一求解,然后進行整理歸納。如圖2 中1 到7,假設以無人機FY00 與FY01、FY02 為發射信號無人機,確定發射信號無人機后對剩余飛機開始實行逐個依次定位。接收信息的無人機對所接收的方向信息約定是:接收信號的無人機與任意兩架發射信號的無人機進行連線,通過形成的夾角進行相對的位置調整。以假設無人機FY00 與FY01、FY02 為發射信號機為基礎對FY0K(3 如圖2 所示被動接收信號的無人機都會接收到發射信號的無人機發來的方向信息,并形成相應的角度,通過連線所形成的三角形都為等腰三角形,可以利用等腰三角形的特點通過簡單的計算求出每個夾角的大小。數據表1 中△012(以無人機編號的最后一位進行簡化△FY00 FY01 FY02 簡化為△012,此規則對下文依然適用)中,∠β1=∠α3,∠α1=∠0 13(∠013 為無人機FY00 與FY01、FY03 連接所形成角的簡稱,此規則對下文依然適用) ∠α1=∠α2=∠α3因為飛機是均勻的分布在圓周上所以∠103=80°∠203=40°,整理可得 ∠α1=(180°-∠1 03)/2=50°,∠α3=∠β1=(180°-∠β1)/2=70°,∠ α2=∠α3-∠α1=20°。依此類推獲得多組數據。 表1 模型和角度對應表 基于012-3 模型對所得數據進行分析,發現所形成的夾角有一定規律可循。即模型012-3 與012-9、012-4 與012-8、012-5 與012-7 數據相似只是數據進行了對調,因此在本模型中只需檢驗012-3、012-4、012-5、012-6 四種模型即可。其余模型013-K、014-K、015-K 驗證方法與012-3相同,且部分數據相同或數據位置交換,在此不進行贅述。a 可以通過發射機本身所形成的角β 來使用正弦函數sin 來確定接收機與發射機形成的角度與表1 進行對比檢驗即可。 定義發射機FY02 與接收機之間的連線為Y,發射機FY01 與FY02 之間的連線為L,如圖3(a)所示。 圖3 角度圖 由圖3 角度圖中可得分析并通過正弦定理[3]的公式(2)的特性推出公式(3)和公式(4): 注:Y:矯正無人機與其一(中間)已知無人機的距離;L:兩已知無人機的距離。 公式(3)與公式(4)整合為: 其中: 對公式(5)進行優化后得: 通過無人機編號FY0K 可以確定∠10K 的角度為40K(0 以模型012-3 為例帶入 β1=70、β2=70 時進行模型的驗證得:α1=50 °、α2=20 °。 以模型012-5 為例帶入 β1=30、β2=70 時進行模型的驗證得:α1=10°、α2=20°。 在已知初始位置和推算出標準位置條件下通過計算與比較得出優化過程,使初始位置無限接近標準位置。使用Matlab 軟件基于遺傳算法進行求解得到無人機初始位置誤差值的變化,并對無人機位置優化調整。 根據已有數據可知編號為0 的無人機位于圓心,且位置準確為題目中無人機FY00、編號為1 的無人機位于無人機FY01 的位置且位置準確,9 架飛機應均勻分布在半徑為100 米的圓周上可推出無人機的理想化位置。其余無人機均有一定誤差,針對這些誤差進行比較與分析,確定誤差大小,并進行初次排序,利用問題二所得出的結論,選取誤差最小的幾架無人機,再通過問題一所得結論確定剩余無人機位置信息,一定程度上減小誤差,與理想化位置進行比較,確定誤差大小進行二次排序。以此類推可以使用優化遺傳算法[4]進行多次迭代,使誤差逐漸減小,讓無人機無限接近理想位置點。 以現有數據為例,將數據進行統一標準整理得出無人機編號和坐標對應表,如表2 所示。 表2 無人機編號和坐標對應表 通過多次迭代,每次使無人機進行一定程度的位置調整,通過位置調整后進行再比較,再調整,在每次調整后進行數據輸出、整理,并計算出實際無人機位置與標準無人機位置的誤差值,整理結果如圖4 所示。 圖4 分析圖 對誤差結果進行分析發現,通過多次調整,使得無人機實際位置與無人機標準位置之間的誤差實現了逐漸減小的趨勢,并無限接近與標準位置。由此推出,該方法對于無人機初始位置有誤差時可以進行有效調整,最大程度的接近標準位置。 在無人機進行錐形編隊飛行時,相鄰無人機間距應保持相等,在確定發射信號的無人機后,可以利用等邊三角形的相關特性進行無人機位置的判定,將信號發送給接收信息位置的無人機后進行位置調整,通過多次遞歸與調整,使無人機進行有效的位置調整。 當無人機編隊進行錐形編隊飛行時,應保持相鄰兩架無人機的間距相等,大的錐形編隊應由無數個小的等邊三角形構成的小型錐形編隊組成。可以確認一個位于角上的無人機為長機剩余無人機為僚機[5],以長機為基準尋找距離為50米的僚機,在兩架無人機確認的基礎上通過等邊三角形原理確定另一架無人機的位置,依此類推便可以將所有無人機進行有效定位。 具體實現步驟如下所示: (1)確定無人機FY01 為長機,以此為基準尋找距離50 米的僚機FY02、FY03 如圖5(a)所示。 圖5 調整圖 (2)通過FY01 與FY02、FY03 利用等邊三角形的基本原理等邊且角度相等,在規定的錐形編隊內可以確定一個或多個點,如圖5(b)所示。 (3)依次類推,得到圖5(c),后進行多次迭代,可以使剩余的僚機實現有效定位。 本文以無人機在進行編隊飛行時如何使用純方位無源定位方法為研究對象,在對無人機均保持一定高度且均勻分布在圓周上為基礎,找到了一種基于正弦函數的計算方法,并建立與求解了相關的模型。 模型的優點: (1)建立的模型和算法與實際緊密聯系,結合實際情況可以對問題進行求解,更加接近實際應用場景,具有較高的通用性。 (2)本文建立的模型具有很強的創新性,使用基于正弦函數的算法新穎,簡化計算流程。 改進之處: (1)文中所建立的模型僅僅適用于二維情景中,在實際的使用中應加入空間變化所產生的相關變量。 (2)模型的使用情景過于理想化,忽視了環境帶來的影響,在實際應用中需要加入類似于風速變化、電磁干擾等變化因數對飛行編隊產生的影響。 模型推廣: (1)抗電子干擾能力強。無人機可以攜帶純方位無源定位設備進入高空,可以極大程度地減少地面其他雜波產生的信號干擾。 (2)作用距離更高更遠。可以使無人機在高遠距離進行飛行作業時接收到比地面更強的信號,實現高難度精準作業。 (3)在民用領域,模型通過改進后可以實現三維有效定位,在日常使用中實用性更強,例如利用無人機在空中進行三維動作展示,進行相關的無人機飛行表演。 (4)在軍事領域,純方位無源定位無人機,在執行秘密任務時可以極大增強生存能力,降低了被發現的概率。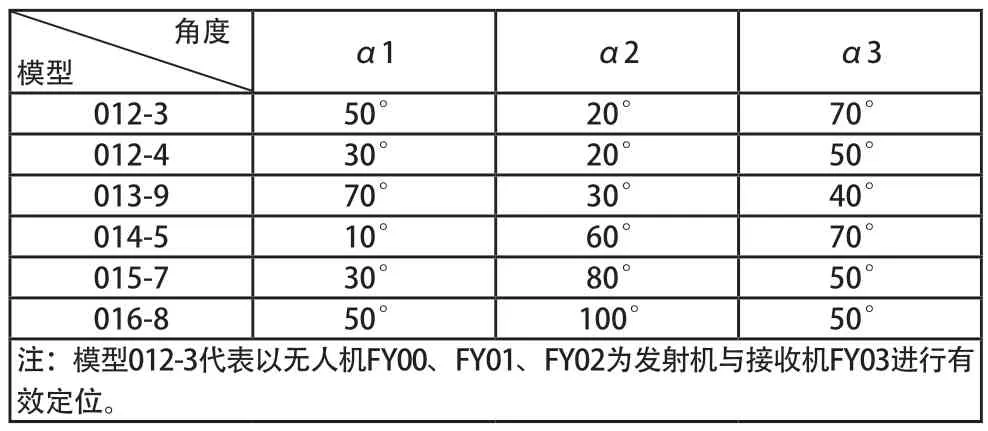
3 九架無人機均勻分布問題
4 無源定位調整方案
5 模型評價、改進與推廣
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38鴨綠江(2021年35期)2021-04-19 12:24:18中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50考試與評價·高一版(2020年6期)2020-11-02 02:45:24數學物理學報(2020年2期)2020-06-02 11:29:24電子制作(2018年11期)2018-08-04 03:25:42中華手工(2017年2期)2017-06-06 23:00:31光學精密工程(2016年6期)2016-11-07 09:07:19鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25中外會展(2014年4期)2014-11-27 07:46:46