基于模糊PID 的單片機溫度控制仿真研究
2023-11-20 10:59:50陳玉強王青林劉鳳舉姜衛星陳昌文
科學技術創新 2023年26期
關鍵詞:系統
陳玉強,王青林,劉鳳舉,姜衛星,陳昌文
(1.汕尾職業技術學院 海洋學院,廣東 汕尾;2 牡丹江師范學院,黑龍江 牡丹江)
近年來,我國工業呈現了突飛猛進的發展勢態。在這一勢態之下,很多設備均實現了自動化操作,而要想保證設備的自動化操作的可靠性及安全性,便需要做好溫度的控制工作。鑒于常規的PID 控制效果不理想的缺點,本文設計了一種模糊PID 溫度控制系統,利用模糊邏輯控制對溫度進行在線調整,滿足控制要求。
1 國內外研究狀況
1.1 國外研究狀況
自1965 年,美國著名控制理論專家扎德教授創始模糊數學以來,模糊控制理論及其應用得到了迅速發展。模糊控制應用始于1973 年,以日本為例,在20世紀80 年代進入了模糊控制實用化時期,1987 年,在模糊控制成功用于仙臺地鐵之后,各種采用模糊控制技術的電子產品,如電視機、攝像機、洗衣機、電冰箱、電飯鍋等相繼研制成功并投放市場[1]。
近年來,模糊控制理論在各個方面應用很廣。多數情況下,模糊控制器用軟件實現。但是在時間要求非常高的情況下,軟件實現已經不能滿足要求,所以幾個模糊邏輯公司開發了一些模糊通用芯片,如美國NS 公司推出的神經網絡模糊邏輯編譯器-NeuFuz4,美國Neural Logic 公司的NLX 系列模糊控制通用微處理器投放市場,NLX 是VLSI 模糊邏輯芯片,主要用于模糊識別領域,德國Siemens 公司和Inform 公司聯合研制了Fuzzy-166 微處理器[2-3]。
1.2 國內研究狀況
自1979 年以來,我國許多科研單位和學者在模糊控制的理論、仿真實驗及其應用方面做了大量的研究工作,這些工作主要集中在對模糊控制系統結構、模糊推理算法、自學習或自組織模糊控制器、模糊控制穩定性問題、神經網絡在模糊控制中的應用、遺傳算法在模糊控制中的應用,以及模糊控制芯片等方面的研究,而其成果應用主要集中于工業爐窯方面,石化方面,機電行業,家電行業,飛行控制等方面[4-6]。
今后模糊智能控制技術中要的研究方向是以模糊控制為核心輔以其他方法而構成大系統智能控制體系。
2 仿真系統設計
本文涉及的電阻爐溫度控制系統是對電阻爐的溫度進行實時測量和控制,使電阻爐的溫度保持在允許的范圍內。電阻爐的溫度控制系統主要有串口通信、主控系統、溫度測量和溫度控制等四個模塊組成,電阻爐為一階慣性系統。
電阻爐溫度控制系統上電后,引導主控器STC89C52 啟動并進入控制主程序。主程序首先對各個模塊進行初始化,包括端口初始化、變量初始化、定時器初始化和模糊查詢表等。初始化完成后,電阻爐溫度控制系統將調用溫度采集程序, 并在顯示屏上實時顯示電阻爐的溫度值,之后等待鍵盤的輸入,當輸入一個目標值時系統進入后續的程序流程。整個程序始終處于while 循環中,主程序負責把各個功能模塊聯接起來。
本設計的采用Keil C 語言程序實現,Protues 運行結果如圖1 所示。
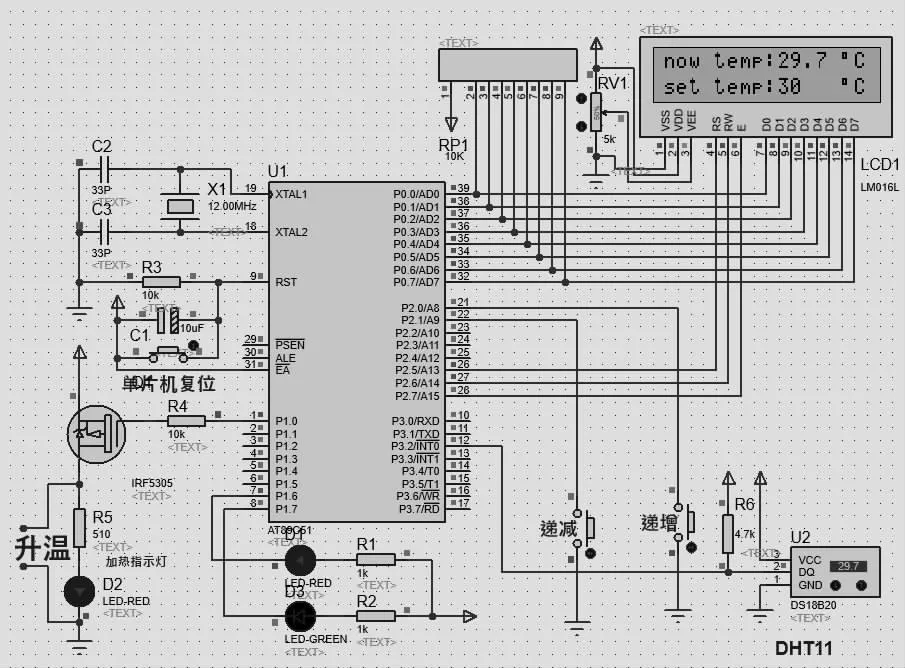
圖1 系統運行結果
3 模糊PID 控制器結構
PID 控制是目前工程中應用最廣且適用性最強的控制算法,其將系統的期望目標與實際輸出之間的偏差經過比例、積分、微分運算構成控制量。模糊PID 利用模糊控制器,根據輸入信號偏差e 的大小、方向和變化趨勢等特征,通過模糊化、模糊推理和模糊決策,在線整定PID 的比例、積分和微分參數。其結構如圖2所示。
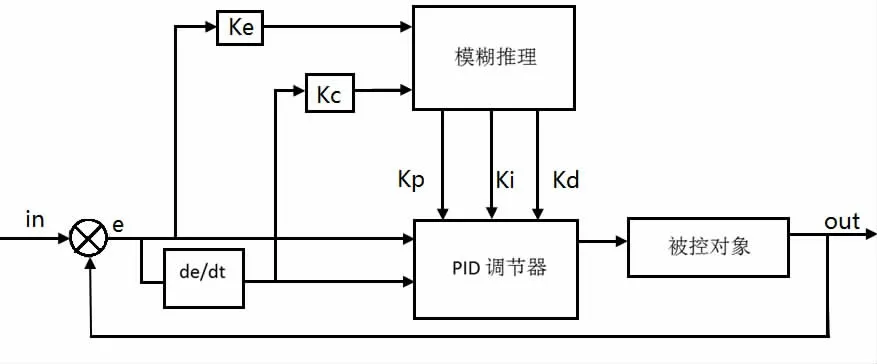
圖2 模糊PID 控制器結構
圖2 中,kp、ki 和kd 為模糊輸出,分別為PID 控制器的比例系數、積分時間常數、微分時間常數,Ke、Kc為模糊比例系數。
模糊PID 計算是電阻爐溫度控制系統的核心部分,其中偏差e 的基本論域為-100~+100,偏差變化率的基本論域為-10~+10。輸出比例系數修正量ΔKp 的基本論域選為-0.24~0.24,積分系數修正量ΔKi 的基本論域為-0.06~0.06,微分系數修正量ΔKd 的基本論域為-0.03~0.03。
4 系統仿真分析
4.1 傳統PID 控制系統的仿真
打開Matlab 仿真集成環鏡Simulink 工作界面,建立系統的階躍環閉環控制框圖,如圖3 所示。

圖3 系統PID 閉環框圖
通過計算,可得Kp=7,Ki=2,Kd=1,其仿真結果如圖4(a)所示,由圖可看出系統響應時間長且系統存在振蕩現象,而且超調量較大,不滿足要求,為了使控制效果得到提升,微調參數后,得到圖4(b)。調整參數后Kp=2,Ki=0.3,Kd=1。
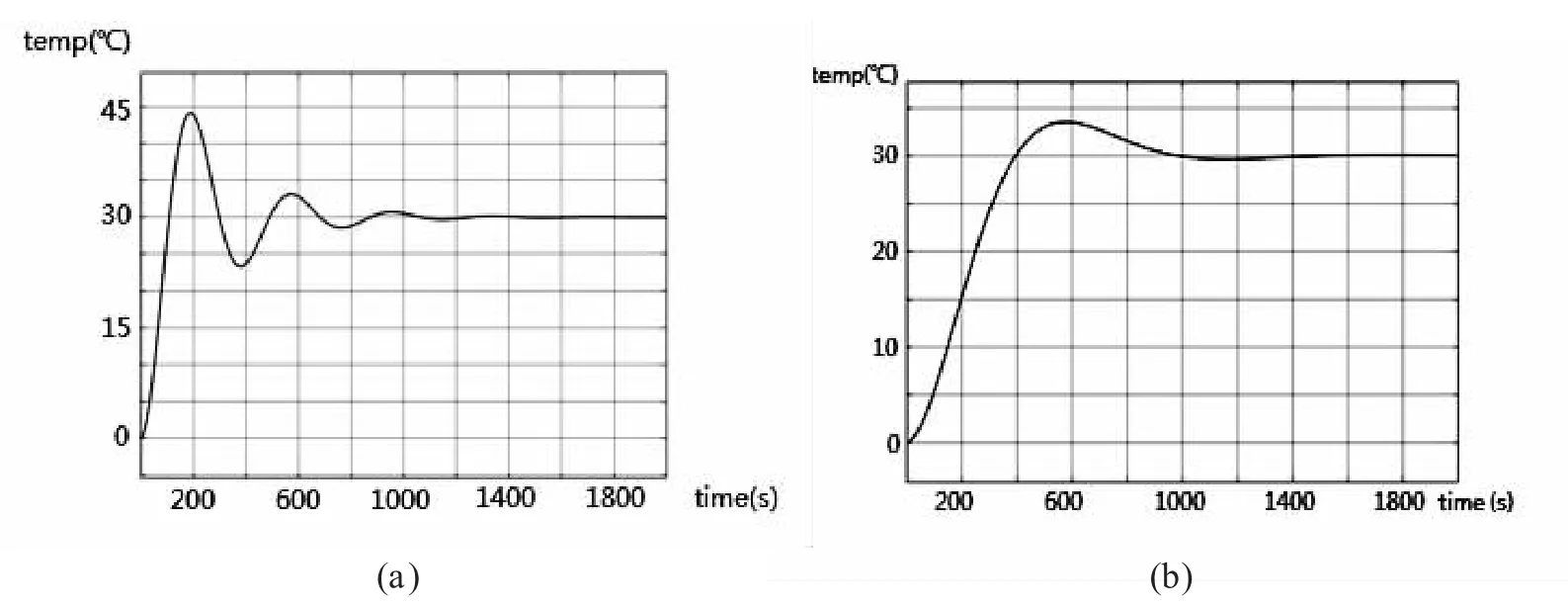
圖4 系統響應曲線
4.2 模糊自整定PID 控制仿真
模型參數確定通過Matlab 軟件模糊推理系統編輯器進行。考慮系統對論域的覆蓋程度、穩定性、靈敏性和魯棒性則,同時為了簡化計算,各個輸入和輸出變量選擇三角形隸屬函數。結合誤差e 及其誤差變化率ec,采用三角形隸屬度函數,得到模糊控制規則如下:
If e=NB and ec=NM Then Kp=PB,Ki=NB,Kd=PS
If e=NB and ec=NM Then Kp=PB,Ki=NB,Kd=PS
...
根據以上控制規則, 設計出電阻爐溫度控制回路參數Kp,Ki,Kd 的模糊控制規則表,表1 為Kp,Ki,Kd模糊控制規則。
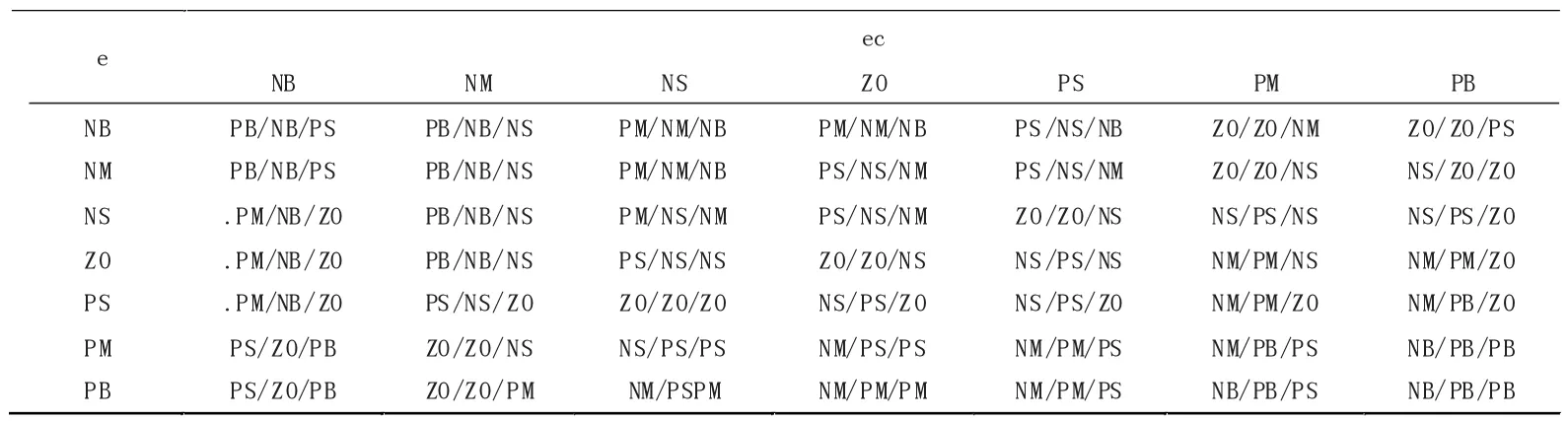
表1 Kp,Ki,Kd 模糊控制規則
模糊控制利用人工控制所取得的經驗,不需要建立精確數學模型,可通過類似于人腦判斷的手段,經過模糊規則推理得出控制結論。由于模糊控制不是按照精準數學模型對被控對象進行控制,因此對具有大慣性、時滯長特性的被控對象有較好的把握能力。模糊PID控制工作框圖如圖5 所示。
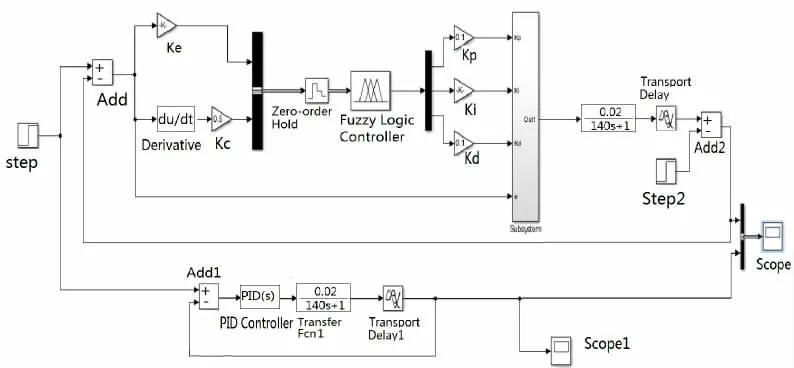
圖5 模糊PID 仿真框圖
經過仿真計算得到圖6,調整后的參數為Kp=15,Ki=0.3,Kd=25。
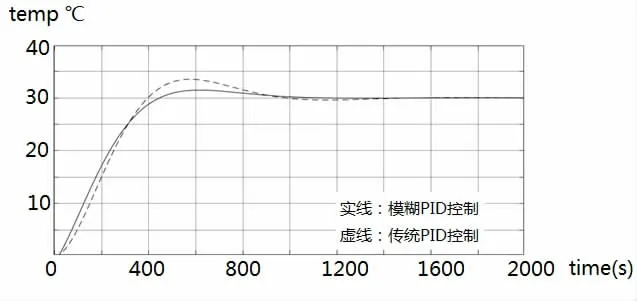
圖6 模糊PID 控制與傳統PID 控制
由圖6 比較數據可得出表2。

表2 系統用常規PID 控制和模糊PID 控制性能比較
由表2 可知,與傳統PID 控制相比,模糊PID控制算法穩定性好、精度高、響應快;模糊PID控制的穩態誤差小、超調量控制小、穩態響應時間短。由此可見,基于模糊控制的PID 控制器,在電阻爐溫度控制效果上好于傳統PID 控制。
5 結論
在電阻爐溫度控制中,與常規PID 控制算法相比,使用基于模糊自整定PID 鍋爐溫度控制算法,既具有常規PID 的優點,也有模糊控制的自適應性和靈活性,說明該方法用于電阻爐溫度控制系統在系統魯棒性、超調控制、響應時間等方面具有明顯的優勢。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32