純電動汽車PMSM+AMT 換擋控制策略
2023-11-22 17:37:52楊鎮瑜韓勝明陳橋松屈凡林尹育隆陰曉峰
西華大學學報(自然科學版) 2023年5期
關鍵詞:控制策略
楊鎮瑜,韓勝明,陳橋松,屈凡林,尹育隆,陰曉峰*
(1.西華大學汽車工程研究所,四川 成都 610039;2.成都汽車產業研究院,四川 成都 610101;3.成都美云智享智能科技有限公司,四川 成都 610095)
電動汽車因其污染小、能量來源廣泛等優點,已成為未來汽車的發展方向。目前純電動汽車較多采用永磁同步電機(permanent magnet synchronous motor,PMSM)加單級減速器的結構,但這種結構會使電機在很大的轉速和轉矩變化范圍內工作,導致整體運行效率受限,所以國內外對純電動汽車用變速器的研究與應用越來越重視[1]。趙玉才[2]在MATLAB/Simulink 中建立了純電動汽車機械自動變速器(automated manual transmission,AMT)執行機構模型,設計了PID 控制器,仿真結果表明能實現快速精確地換擋。趙偉樺[3]制作了動力傳動系統的硬件,然后以CAN 通信為基礎,監測處理車輛狀態、驅動電機以及智能檢測換擋間距等功能。Kim 等[4]提出了一種新的移位序列補償速度控制算法,以降低AMT 的換擋沖擊。岳漢奇[5]以基于multi-route 技術路線采用后置離合器滑摩助力換擋的I-AMT(inverse-automatic mechanical Transmission)為研究對象,提出了擾動抑制控制器,優化了滑摩功損失和車輛沖擊度,與LQR(linear quadratic regulation)控制器相比,減小了換擋沖擊度。悉尼科技大學 Tian 等[6]提出了一種最優控制器,在轉矩相階段的優化目標為車輛沖擊度和滑摩功,在慣性相階段的控制目標為減少滑摩功,結果表明此控制器能提高換擋品質。Walker 等[7]建立了驅動電機和變速器同步機構模型,采用轉速和扭矩的閉環控制來優化換擋過程。Li 等[8]利用線性二次型控制算法,實現了對離合器的最優控制。Gao 等[9]以帶有后置離合器的 AMT 為研究對象,制定了相應的控制策略,并采用PID 控制算法來控制慣性相階段的離合器,以實現無動力中斷換擋。
本文針對PMSM+AMT 多擋電驅變速系統,提出了卸載、同步、轉矩恢復等階段的優化控制策略,進而提升換擋品質。首先建立了PMSM+AMT電驅變速系統的動力學模型,分析換擋時不同階段的工作情況,并以換擋沖擊度以及換擋時間為評價指標,提出了各個階段相應的控制策略,最后在MATLAB/Simulink 中建立仿真模型,驗證了控制策略的有效性。
1 PMSM+AMT 系統動力學模型
本文研究的電驅變速系統中,PMSM 輸出軸與AMT 輸入軸直連,驅動電機輸出轉矩直接傳遞到AMT 輸入軸,再由AMT 輸出軸傳遞到主減速器、車輪,驅動車輛行駛。通過分析動力傳動系統的數學模型,得到傳動系統受力簡圖,如圖1 所示。

圖1 傳動系統受力簡圖Fig.1 Schematic diagram of transmission system stress
圖1 中從左至右依次代表PMSM、AMT、主減速器、整車。驅動電機輸出轉矩Tm至變速箱輸入軸,變速箱輸出轉矩Tto至主減速器輸入端,經主減速器后輸出轉矩To給整車,整車克服行駛阻力Tw進行行駛。圖中:ig、io分別表示傳動系統中變速箱和主減速器的傳動比;ωm、ωto、ωo、ωw分別表示PMSM、變速器輸出軸、主減速器輸出軸、車輪的角速度,rad/s 。
1.1 PMSM 驅動電機模型
在dq坐標系下,PMSM 的電壓方程式[10]可表示為
式中:ud、uq、id、iq為定子電壓和電流在d、q軸下的分量,V、A;ωe為當前PMSM 的轉子磁鏈旋轉角速度,rad/s;Ld、Lq分別為dq坐標下PMSM 的電感分量,H;Rs為定子電阻,Ω;ψf為合成的轉子磁鏈,Wb。
電機磁鏈方程[10]為
式中:ψd、ψq為dq坐標下的磁鏈分量,Wb。
電機轉矩方程[11]為
式中:Te為電機電磁轉矩,N·m;p為極對數。
電機機械運動方程[11]為
式中:TL為驅動電機的負載轉矩,N·m;Jm為PMSM 的轉動慣量,kg·m2;ωm為PMSM 的轉子轉動角速度,rad/s;B為驅動電機的阻尼系數。
1.2 無離合器AMT 系統模型
1.2.1 在擋模型
當變速器在擋行駛時,PMSM 的輸出轉矩經過變速箱到達主減速器,再通過傳動軸傳遞給車輪,以驅動汽車行駛。系統動力學方程[12]如下:
式中:Jti、Jto、Jo、Jw為AMT 輸入軸、輸出軸、主減速器以及車輪的轉動慣量,kg·m2;Tmf、Tw分別為驅動電機摩擦轉矩、整車行駛阻力轉矩,N·m;k、b分別為驅動軸彈性、阻尼系數;φo、φw分別為主減速器輸出軸、車輪的轉動角度,rad;ωw為車輪的角速度,rad/s;rw為車輪的半徑,m;m為汽車總質量,kg。
1.2.2 空擋模型
處于空擋狀態時沒有動力輸出,其動力學方程為
式中:ωto為AMT 輸出軸角速度,rad/s;To為主減速器輸出軸轉矩,N·m。
1.2.3 摘掛擋模型
摘掛擋時,控制的主要對象是嚙合套。對撥叉施加沿齒輪軸的軸向力,產生摩擦力矩,從而使同步器主、從動部分的轉速差逐漸減小至0[13]。在理想條件下,由轉矩、轉動慣量與角加速度的關系可得同步器主動端、從動端的動力學方程分別為
式中:Ts為同步器主動端的輸入轉矩,N·m;Jm為PMSM 的轉動慣量,kg·m2;ωm1為同步器從動端的角速度,rad/s;Jc為同步器的轉動慣量,kg·m2;sign為符號函數。
2 換擋控制策略
2.1 控制系統結構
在換擋過程中,首先由整車控制器 (vehicle control unit,VCU)根據車輛狀態判斷是否需要進行換擋,若需要換擋則發出指令給變速器-電機集成控制器(transmission-motor control unit,T-MCU)啟動換擋過程。集成控制器根據換擋過程各階段相應的控制策略,得到驅動電機及變速器的需求,并根據傳動系統反饋的信息,判斷換擋過程各個階段的執行情況,使整車能夠順利完成換擋并傳遞換擋結束信息給VCU。PMSM+AMT 換擋控制系統結構如圖2 所示。

圖2 PMSM+AMT 換擋控制系統結構Fig.2 PMSM+AMT shift control system structure
2.2 換擋控制策略
PMSM+AMT 系統換擋過程可分為5 個階段。卸載階段電機應處于轉矩模式,摘擋階段電機由轉矩模式轉換為自由模式,同步階段電機應處于轉速模式,掛擋階段電機處于自由模式,轉矩恢復階段電機恢復到轉矩模式[14]。在這5 個階段中AMT 處于卸載、摘擋、同步、掛擋、轉矩恢復5 種狀態之一。
1)卸載。
T-MCU 控制驅動電機降低輸出轉矩,為了避免驅動電機輸出轉矩脈動,需要控制驅動電機的輸出轉矩以一定的速率降低。結合式(4)和式(5)可推導出驅動電機在卸載階段的轉矩變化率應滿足
式中:k1為卸載階段的轉矩變化率;Tm1為卸載階段驅動電機的輸出轉矩,N·m;Tw1為準備摘擋過程行駛阻力矩,N·m;j為沖擊度,m/s3。
2)摘擋。
當集成控制器接收到驅動電機輸出轉矩降低至目標轉矩時的信息后卸載階段完成,集成控制器發出摘擋控制指令給換擋執行機構,摘擋過程開始,同步器開始分離,當到達相應的位置后反饋信息給集成控制器,集成控制器判定摘擋階段結束。
摘擋時由于驅動電機和變速器會有轉速差產生,此時整車的驅動力矩為同步器的滑摩轉矩,故在滑摩階段的同步器滑摩轉矩[12]應滿足
式中:k2為摘擋過程同步器目標滑摩轉矩變化斜率;Ms為同步器滑摩轉矩,N·m;Tw2為行駛阻力矩,N·m,可忽略不計。
3)同步。
驅動電機進入轉速模式,并開始進行主動調速。根據測得的同步器從動端的轉動速度來計算PMSM 的目標轉速[15]。
式中:igtar為目標擋位傳動比;為PMSM 的目標轉速,rad/s;ωm1為同步器從動端的角速度,rad/s;Δωm1為預設轉速偏差,rad/s。
當轉速差縮小到設定值,AMT 接收到集成控制器發送的同步指令,開始施加同步力矩,使同步器通過其主從部分的滑磨作用,進一步減小兩端的轉速差,直至到達目標值。
4)掛擋。
驅動電機進入自由模式。驅動電機在此階段的轉速初始值與上一階段的結束值相同,轉矩初始值與上一階段的結束值一致。此階段由換擋電機帶動換擋執行機構進行相應的掛擋動作。對于掛擋過程的控制,為了縮短換擋時間,因此只考慮換擋執行機構能夠快速掛擋。
5)轉矩恢復。
驅動電機的目標轉矩確定方法與準備摘擋階段類似,也根據沖擊度標準來制定轉矩恢復變化率。轉矩初始值為掛擋結束時的驅動電機轉矩,變化率應盡可能大,以減小換擋時間。結合式(4)和式(5)可推導轉矩恢復的變化率應滿足
式中:k3為轉矩恢復過程目標轉矩曲線斜率;Tm3為電機輸出轉矩,N·m;Tw3為掛擋過程行駛阻力矩,N·m。
2.3 基于查表的MTPA 驅動電機控制算法
采用基于空間矢量脈寬調制算法以及最大轉矩電流比控制(space vector pulse width modulationmaximum torque per ampere,SVPWM-MTPA)方法控制驅動電機[16]。通過確定旋轉坐標系下的d軸電流來充分利用磁阻轉矩,使驅動電機在輸出相同轉矩的情況下其定子電流最小。將定子電流分解為d、q軸電流,可得到d、q軸的電流滿足:
式中:is為PMSM 的定子電流矢量,A;β為PMSM的定子電流矢量和d、q軸坐標的電流矢量夾角。
通過拉格朗日極值定理可以構造出的輔助函數為
式中:F為拉格朗日函數;λ為拉格朗日的乘子。對函數F求偏導[16],得到
電流矢量夾角滿足
得到各轉速、轉矩值對應的最佳id、iq值。在仿真模型中采用基于查表法的MTPA 控制策略,并使用前饋解耦控制算法以提高系統的動態響應特性,通過SVPWM 控制逆變器以達到控制驅動電機的目的。MTPA-SVPWM 控制策略如圖3 所示。

圖3 MTPA-SVPWM 系統原理框圖Fig.3 MTPA-SVPWM system schematic diagram
采用MTPA 控制時,以速度環為例,通過傳感器獲得反饋速度,將目標轉矩作為PID 控制器的輸出。通過查詢PMSM 的目標轉矩與實際轉速,得到d、q軸的目標電流,并通過電流表查詢控制目標d、q軸電壓udref、uqref,經過電壓前饋解耦控制后輸出電壓矢量uα、uβ,最后經SVPWM 調制得到逆變器控制信號。
對于凸極型的PMSM,其轉矩的變化率與PMSM的定子磁鏈、轉矩角以及轉矩角的變化率有關,通過確保轉矩變化率為正來保證轉矩是隨著轉矩角的增大而增大。當凸極系數大于1 時,應滿足
式中,ψs為定子磁鏈矢量,Wb。
磁鏈的值可以通過測量定子的電壓和電流等物理量來建立磁鏈模型,然后間接計算估計獲得。基于電壓-電流模型可將其表示為[17]
式中:us為定子電壓,V;is為定子電流,A。
在實際的控制方式中,會采用低通濾波器來代替純積分器,但這種改進會帶來定子磁鏈的幅值與相位誤差[18],而空間矢量脈寬調制理論可以較好地解決這個問題。SVPWM 的理論是平均值等效原理[19],需要將電壓進行分解,SVPWM 電壓矢量分解如圖4 所示。

圖4 SVPWM 電壓矢量分解圖Fig.4 SVPWM voltage vector decomposition diagram
SVPMW 控制算法下的空間電壓矢量可表示為
式中:ua、ub、uc為三相的電壓矢量;utotal為合成的空間電壓矢量;θ為合成的空間電壓矢量的角度,rad,可表示為θ=2πft,其中f為電源頻率,t為時間。
通過將360 度的電壓空間分為60 度一個扇區,共6 個扇區,利用這6 個基本有效矢量和兩個零量可以合成360 度內的任何矢量。為了得到逆變器的目標開關時間,可以將合成的空間電壓矢量分解到軸上,并可進一步控制磁鏈的合成[12]。
3 仿真驗證
3.1 仿真模型
為了驗證所提策略的有效性,使用MATLAB/Simulink 軟件建立了整車的仿真模型。該模型主要由PMSM 模塊、AMT 模塊和整車縱向動力學模塊組成。
PMSM 模塊如圖5 所示。以轉速模式為例,PMSM 接收到目標轉速值,與實際轉速作差,差值作為PID 控制器的輸入,輸出當前目標轉速下的期望轉矩,進行限制后查詢MTPA 控制策略表,得到最佳的d、q軸電流值,并結合前饋解耦控制計算出d、q兩相電壓,通過SVPWM 求得占空比,輸入到三相橋臂,從而控制轉速。

圖5 PMSM 模塊Fig.5 PMSM module
AMT 模塊如圖6 所示,主要模擬換擋過程中變速器的動力學行為。其輸入為當前擋位、PMSM的輸出轉矩、轉速和變速器工作模式,輸出為變速器輸入軸的轉矩及轉速、變速器輸出軸的轉矩及轉速以及同步器狀態信息。
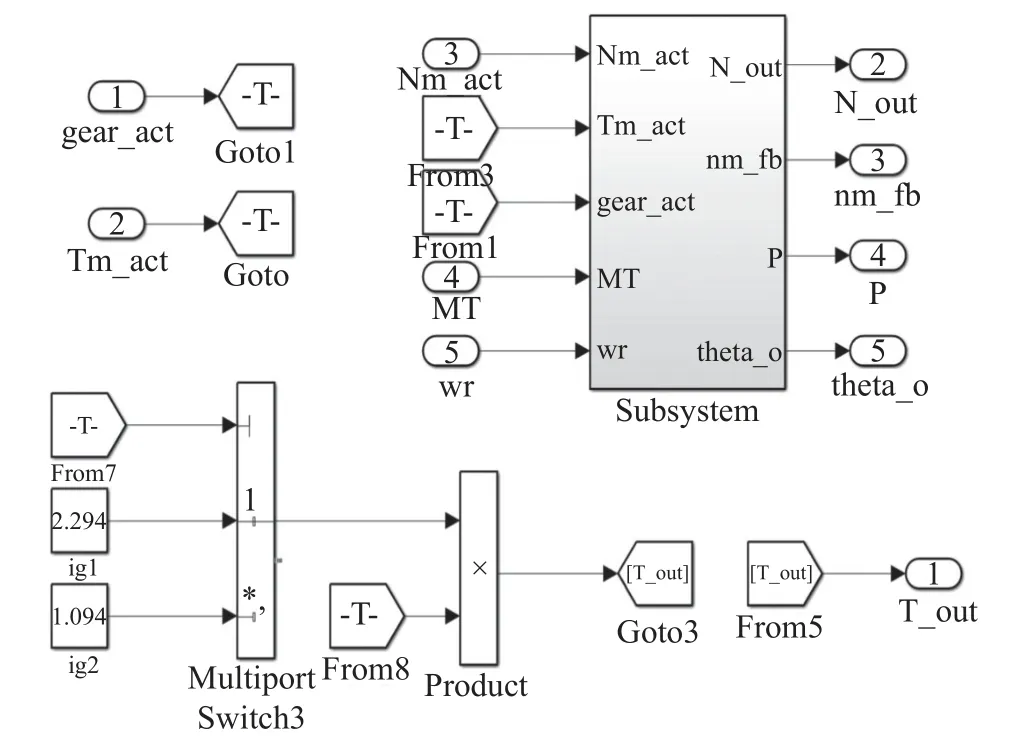
圖6 ATM 系統模型Fig.6 ATM system model
整車縱向動力學模塊如圖7 所示,主要模擬換擋過程中整車的縱向動力學行為。其輸入為主減速器的輸出轉矩、當前擋位、整車質量、坡度和制動力,輸出為車速。

圖7 整車模型Fig.7 Vehicle model
仿真參數:整車質量m為1 450 kg;車輪半徑rw為0.316 m;空氣阻力系數CD為0.32;滾動阻力系數f為0.015;迎風面積A為2.45 m2;驅動電機額定/峰值功率為45/90 kW,額定/峰值轉速為2 200/6 000 r/min,額定/峰值轉矩為195/300 N·m;動力電池簡化為恒定電壓放電,其容量為20.7 kWh;傳動系統的主減速比為i0=6.8,一擋傳動比為i1=1.6,二擋傳動比為i2=0.95。
3.2 仿真分析
以10%、30%、60%加速踏板開度下1 擋升2 擋為例,純電動汽車換擋過程的PMSM+AMT 系統輸出轉矩、輸出轉速、沖擊度的仿真結果如下。
1)10%加速踏板開度。
10%加速踏板開度的仿真結果如圖8 和9 所示。51.032 s 之前為純電動汽車的加速過程,51.032~51.045 s 為卸載階段,51.145~51.307 s 為同步階段,51.407~51.415 s 為轉矩恢復階段,之后整車繼續加速。整個換擋過程耗時0.383 s。

圖8 10%加速踏板開度轉矩、轉速、車速Fig.8 10% accelerator pedal opening torque,rotational speed,speed
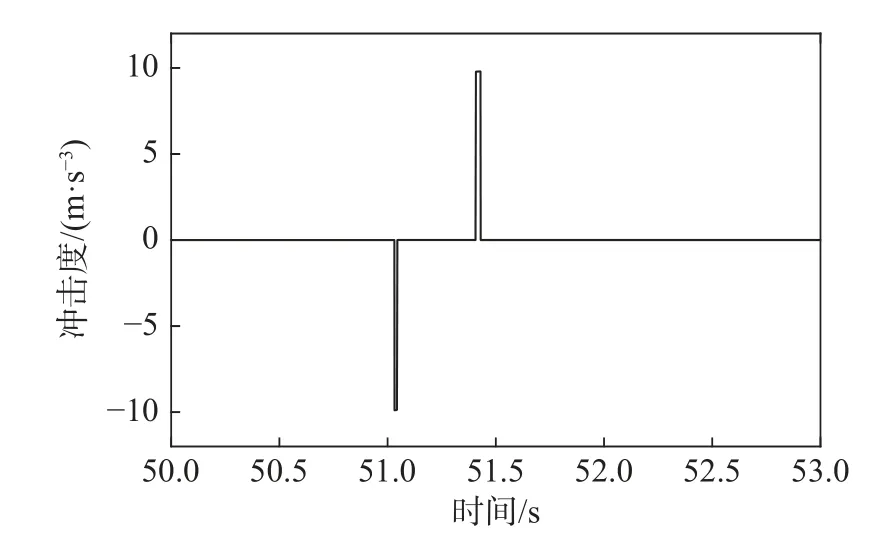
圖9 10%加速踏板開度沖擊度Fig.9 10% accelerator pedal opening impact degree
對于升擋過程電機輸出轉矩曲線,可以看出卸載階段轉矩從12.1 N·m 開始線性下降,摘擋過程迅速調節輸出轉矩至0,同步過程中斷動力傳遞,掛擋過程驅動電機輸出轉矩逐漸回升,轉矩恢復過程轉矩進一步增大,最終達到19.53 N·m 的轉矩后開始下降。
驅動電機在卸載階段處于轉矩模式,驅動電機的輸出轉矩開始逐漸降低,當驅動電機的輸出轉矩開始小于負載后,驅動電機趨于倒拖狀態。同步階段沒有動力輸出,整車進行慣性行駛,在51.407 s同步階段結束后,進入動力恢復階段,驅動電機的轉速輸出與自動變速器的轉速輸入逐漸相同,整個過程的轉速未出現明顯超調。
從51.043 s 開始,整車驅動力開始小于行駛阻力,車速開始下降;經過摘擋、同步、掛擋等階段后,在51.42 s 時,驅動力開始大于行駛阻力,車速開始上升。
根據沖擊度仿真可以看出,在10%加速踏板開度下的換擋過程中,PMSM+AMT 系統在卸載階段的最大沖擊度為-9.89 m/s3;加載階段的最大沖擊度為9.8 m/s3。
2)30%加速踏板開度。
30%加速踏板開度的仿真結果如圖10 和11 所示。18.401 s 之前為純電動汽車的加速過程,18.401~18.445 s 為卸載階段,18.545~18.752 s 為同步階段,18.852~18.881 s 為轉矩恢復階段,之后整車繼續加速。整個過程耗時0.48 s。

圖10 30%加速踏板開度轉矩、轉速、車速Fig.10 30% acceleration pedal opening torque,rotational speed,speed

圖11 30%加速踏板開度沖擊度Fig.11 30% acceleration pedal opening impact degree
從升擋過程電機輸出轉矩曲線可以看出,卸載階段轉矩從29.66 N·m 開始線性下降,摘擋過程迅速調節輸出轉矩至0,同步過程中斷動力傳遞,掛擋過程驅動電機輸出轉矩逐漸回升,轉矩恢復過程轉矩進一步增大,最終達到50.11 N·m 的轉矩后開始下降。
在18.545 s 開始同步,整車動力中斷,整車進行慣性行駛,18.752 s 同步階段結束后,進入動力恢復階段,驅動電機的轉速輸出與自動變速器的轉速輸入逐漸相同,整個過程的轉速未出現明顯超調。
從18.441 s 開始,整車驅動力開始小于行駛阻力,車速開始下降;經過摘擋、同步、掛擋等階段后,在18.867 s 時,驅動力開始大于行駛阻力,車速開始上升。
根據沖擊度仿真可以看出,在30%加速踏板開度下的換擋過程中,PMSM+AMT 系統在卸載階段的最大沖擊度為-9.92 m/s3,加載階段的最大沖擊度為9.83 m/s3。
3)60%加速踏板開度。
60%加速踏板開度的仿真結果如圖12 和13所示。9.36 s 之前為純電動汽車的加速過程,9.36~9.45 s 為卸載階段,9.55~9.77 s 為同步階段,9.87~9.94 s 為轉矩恢復階段,之后整車繼續加速。整個過程耗時0.58 s。

圖12 60%加速踏板開度轉矩、轉速、車速Fig.12 60% accelerator pedal opening torque,rotational speed,speed

圖13 60%加速踏板開度沖擊度Fig.13 60% accelerator pedal opening impact degree
從升擋過程電機輸出轉矩曲線可以看出,卸載階段轉矩從56 N·m 開始線性下降,摘擋過程迅速調節輸出轉矩至0,同步過程中斷動力傳遞,掛擋過程驅動電機輸出轉矩逐漸回升,轉矩恢復過程轉矩進一步增大,最終達到94.58 N·m 的轉矩后開始下降。
在9.55 s 開始同步,整車動力中斷,整車處于慣性行駛階段,在9.77 s 同步過程結束后,進入動力恢復階段,驅動電機的轉速輸出與自動變速器的轉速輸入逐漸相同,整個過程轉速未出現明顯超調。
從9.44 s 開始,整車驅動力開始小于行駛阻力,車速開始下降。經過摘擋、同步、掛擋等階段后,在9.89 s 時,驅動力開始大于行駛阻力,車速開始上升。
根據沖擊度仿真可以看出,在60%加速踏板開度下的換擋過程中,PMSM+AMT 系統在卸載階段的最大沖擊度為-9.96 m/s3,加載階段的最大沖擊度為9.86 m/s3。
結果表明,本文所提的換擋控制策略在整個換擋過程中產生的最大沖擊度均未超過德國沖擊度標準10 m/s3,且換擋時間皆少于0.6 s,滿足換擋品質要求。
4 結論
基于空間矢量脈寬調制的最大轉矩電流比控制方法能有效降低電機輸出轉速及轉矩脈動,提高純電動汽車的動態響應,以滿足不同道路工況下的需求。經過在不同加速踏板開度下的驗證,本文提出的PMSM+AMT 系統換擋控制策略能使純電動汽車的換擋時間較短,驅動電機輸出轉矩變化平穩,升擋過程電機轉速無明顯超調,系統沖擊度滿足標準要求,提高了駕乘舒適性。但由于本文采用的是基于沖擊度上限的控制策略,通過調整上限值,沖擊度還有優化的空間。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
