半導體制冷片溫控系統應用研究
2023-11-22 11:41:30劉奧成鄭欣鵬王巧石文星秦工
現代信息科技 2023年19期
關鍵詞:單片機
劉奧成 鄭欣鵬 王巧 石文星 秦工

摘? 要:隨著半導體材料的技術發展,半導體制冷技術越來越成熟,并且廣泛地運用于便攜制冷設備。研究將半導體制冷片溫控系統應用于冰的導熱系數測量裝置之中,具有所占空間體積小、控溫效果好、環境適應強、噪聲小、穩定性高等特點。該裝置是通過負溫度特性NTC電阻來讀取冰的表面溫度,使用單片機獲取溫度數值,增量式PID控制電壓幅值,達到控制半導體制冷片表面溫度的效果。借助單片機來讀取熱流計的熱流密度,并計算出冰的導熱系數。整個裝置結構簡單,對環境要求不高,控溫速度迅速,控溫效果良好,有著良好的穩定性。
關鍵詞:半導體制冷片;冰的導熱系數;熱流計法;單片機;PID控制算法
中圖分類號:TP273;TB657 文獻標識碼:A 文章編號:2096-4706(2023)19-0055-04
Application of Semiconductor Refrigeration Sheet Temperature Control System
LIU Aocheng, ZHENG Xinpeng, WANG Qiao, SHI Wenxing, QIN Gong
(School of Artificial Intelligence, Jianghan University, Wuhan? 430056, China)
Abstract: With the development of semiconductor materials technology, semiconductor refrigeration technology is becoming more and more mature and widely used in portable refrigeration equipment. In this paper, the semiconductor refrigeration sheet temperature control system is applied to the ice thermal conductivity measurement device, which has the characteristics of small space volume, good temperature control effect, strong environmental adaptability, low noise and high stability. The device reads the surface temperature of ice through the negative temperature characteristic NTC resistor, uses the Single-Chip Microcomputer to obtain the temperature value, and incremental PID controls the voltage amplitude to achieve the effect of controlling the surface temperature of the semiconductor refrigeration sheet. The heat flux density of the heat flow meter is read by the Single-Chip Microcomputer, and the thermal conductivity of the ice is calculated. The whole device has simple structure, low environmental requirements, fast temperature control speed, good temperature control effect and good stability.
Keywords: semiconductor refrigeration sheet; thermal conductivity of ice; heat flow meter method; Single-Chip Microcomputer; PID Control Algorithm
0? 引? 言
半導體制冷片[1]有噪聲小,制冷速度迅速,穩定性高,沒有運動部件等優點。本文應用半導體制冷片作為溫控系統[2]的執行機構,作用時間短且迅速,對能耗要求不是很高,實現相對恒定的溫差,再利用熱流計來測量出熱流密度[3],從而得出冰的導熱系數[4]。此方法結構簡單,對環境要求不高。
1? 半導體制冷片工作原理
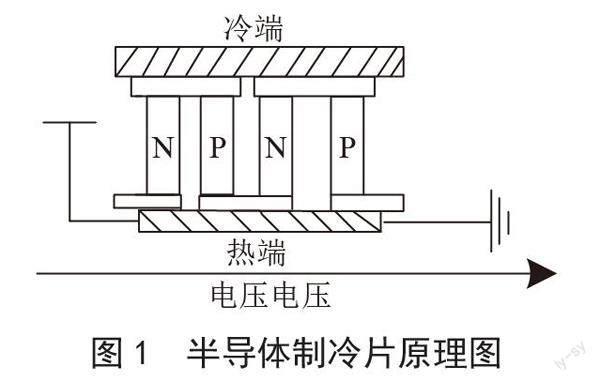
半導體制冷片也叫熱點制冷片,它屬于一種熱泵。半導體制冷片由N型半導體與P型半導體片所組成,由這兩種的半導體元件構成一個熱電偶對,也叫帕爾貼元件,即PN結。當有直流電經過熱電偶時,會伴隨著能量的轉移,在結點處會產生能量交換。半導體制冷片通直流電制冷原理如圖1所示。
當直流電加上半導體制冷片時,由于直流電壓方向向右為正,即電流從右到左,則電子是先經過P型半導體,冷端,N型半導體,最后是熱端。電子經過P型半導體會吸收熱量,由于吸收熱量即在冷端中溫度會急劇下降,電子再經過N型半導體之后,與P型半導體不同,電子經過N型半導體時,是釋放熱量,釋放的熱量將在熱端體現,呈現比較高的溫度。同時電流的大小影響著兩端的溫差大小,方向影響著兩端溫差的正負,即原來熱端變成冷端,原來冷端變成熱端。由于通過一個PN結往往不夠實際應用的要求,通常會將多個PN結級聯并用導熱良好的陶瓷片封裝起來。
2? 溫控系統設計方案及硬件電路
2.1? 半導體溫控系統設計方案
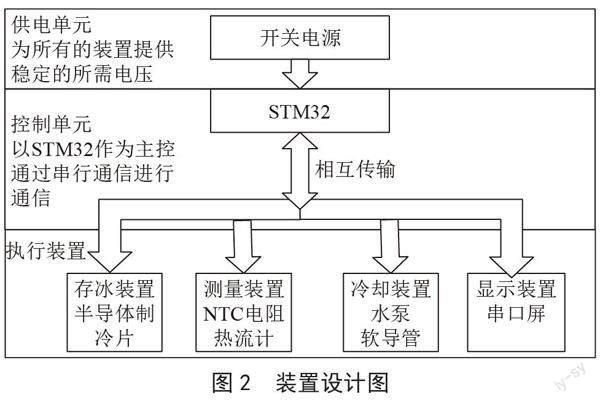
整個半導體溫控系統主要分成測量裝置、顯示裝置、運算裝置、供電裝置、冷卻裝置五個部分,整個溫控系統設計圖如圖2所示。
整個溫控系統設計方案[5]主要采用意法半導體的STM32F103作為主控,通過NTC電阻作為溫度探頭,來測量半導體制冷片的冷面溫度。同時,溫控系統主要以12 V大電流開關電源作為供電電源。由于半導體制冷片中的熱端溫度不能過高,所以在半導體制冷片的熱端采用導熱性良好,粘連度強的導熱硅脂均勻涂在熱端表面并用水冷頭緊緊壓成一體。溫控系統采用循環水冷機制,來實現半導體制冷片熱端散熱的功能。
本文主要采用12 V直流水泵,額定功率小而且噪音小。將小水泵放置水箱之中,并用橡膠軟管將水冷頭與水泵,小水泵將常溫的水抽到水冷頭,吸收半導體制冷片熱端的溫度,通過軟管最終流向水排,由于水排是由兩個風扇和導管所組成,風扇正常工作,降低導管內的液體溫度,最后降溫水流向水箱,形成循環,為半導體制冷片實現散熱。
當半導體制冷片工作后,溫度探頭測量溫度,主控讀取負溫度系數NTC電阻的溫度數值。接著主控將讀取的溫度進行增量式PID控制,以主控的PWM輸出IO端口為媒介,輸出不同的占空比,來控制半導體制冷片的兩端有效電壓。由于有效電壓的變化,導致半導體制冷片電流發生變化,最終達到溫度控制的效果。
本裝置所使用的熱流計是接觸式熱流計[6],接觸式熱流計主要是由兩部分所組成的,它的核心部件是一個熱電偶,這個熱電偶是由兩種不同金屬所組成的,當兩種金屬處于兩個不同的溫度時會產生電勢差,這個電勢差是模擬信號,即需要變送器[7]來實現模擬信號轉換成數字信號,同時變送器可以這種電勢差放大和轉換成標準的數字信號,更好地實現對熱流密度的測量。本裝置上使用的是輸出是RS485信號,本協議是將數據通過差分信號傳輸,有著較強的抗干擾能力。由于單片機使用的是TTL電平,所以需要將RS485信號轉換成TTL信號,本裝置使用的是MAX485芯片,將485信號轉換成TTL電平,即可以使用STM32的串口外設將熱流計的參數讀取出來,并在STM32中計算出此時的瞬時熱流密度和冰的導熱系數。
整個裝置的顯示裝置是由串口屏與STM32來實現顯示,使用串行總線的方式進行通信,同時將STM32內部運行內存所計算出的熱流密度和當前冰面的溫度值通過串行通信的方式傳輸到串口屏中,達到顯示的目的。
2.2? 半導體溫控系統硬件設計
整個溫控系統主要是以STM32F103為主控,通過STM32中AD引腳來讀取NTC兩端的電壓,由于使用穩壓芯片可能有些紋波,會影響讀取NTC的電壓[8],出現電壓波動的情況。所以在整個控溫系統中使用TL341芯片,實現電壓基準的功能,減小讀取電壓誤差,提高溫控系統的精度。與此同時,在輸入NTC電壓輸入前段與同相放大電路串聯,將電壓值放大兩倍,達到提高溫度讀取精度。由于在STM32中,引腳IO口電流帶載能力只有20 mA左右,根本不可能承受得了半導體制冷片在12 V直流電下的電流。則需要射級放大電路來提高承載大電流的能力。通過MOS管提高承載電流能力,通過PWM來實現控制MOS管的通斷,最后來改變施加在半導體制冷片上的有效電壓,來將控制半導體制冷片的輸出功率。控制了半導體制冷片的輸出功率,隨之也將改變半導體制冷片的控制溫度。熱流計主要是使用了RS485串行總線標準,通過485轉成TTL芯片將熱流計的數據變成STM32可讀取到的串口信息。最后使用STM32通過串口發送數據到串口屏中,將冰的導熱系數的數值呈現出來。
3? 裝置控溫處理方法及原理
PID算法[9]在控制領域已經成為比較引用廣泛的一種算法了。在PID算法中主要是通過比例、積分和微分三種方式來調節系統,PID算法的框架圖如圖3所示。
在PID算法中,由于計算機中都是離散信號,所以有了位置式PID和增量式PID。增量式PID是由在傳統的位置型PID算法改進得來。傳統的位置式PID如式(1),傳統的位置型PID是與過去的之前的各個狀態都是有關的,所以需要不斷的累加,增大主控的計算量,所以有了增量式PID算法,增量式PID算法的表達式如式(2):
由增量式PID的公式來看,輸出結果只與最近的三次的誤差值有關,舍去了累加的操作,同時根據調參來實現適應不同的系統來達到控制的效果。同時,使用增量式PID每次控制增量,即不會出現故障值很大的情況,不會嚴重影響控制過程。增量式PID也改善了PID算法的積分飽和的問題,只需要通過限制幅值輸出。
4? 基于半導體制冷片溫控的應用
4.1? 測量冰的導熱系數
導熱系數是指材料在溫度梯度下傳遞熱量的能力。具體而言,導熱系數是單位時間內單位面積上升1 ℃溫度梯度時,材料內部傳熱的熱流密度與溫度梯度的比值。對于冰而言,它的導熱系數與溫度有關,隨著溫度的升高而增大。但是冰的導熱系數很特殊,冰的導熱系數受到很多因素的影響,例如冰的密度、晶格結構、含氣量、溫度等。在本裝置測量冰的導熱系數使用的是純凈水,但是冰中含的氣泡,晶格等其他冰樣特征無法保證,即多次實驗的測量出的冰的導熱系數并不是一個定值。由于冰的物理特性,本裝置在并沒有控制裝置周圍環境,則控制冰的溫度時,測量的時間不能太短,而且制冷效率要好。利用半導體制冷片的快速制冷和優秀的制冷效果,基于半導體制冷片的溫控系統能夠很好地符合了冰的導熱系數測量要求。
4.2? 測量原理
測量方法主要是通過傅里葉定律[10]來測量出冰的導熱系數。測量原理中的傅里葉定律必須是一維穩態傳熱方程,即在測量冰的導熱系數的時候,必須知道在冰樣中的熱流密度并反推得到冰的導熱系數。原理圖如圖4所示。
整個測量的傳熱圖如圖五所示,其中的q為熱流密度,Δh為上下兩側的半導體制冷片的間距,ΔT為待測冰樣兩端的溫度梯度,由于整個溫控系統需要時間,即需要一定時間才能將冰樣進入穩態,也就是說上下冰樣的溫度與溫控系統所設定溫度一致后,再通過熱流計測量出熱流密度,從而計算出冰的導熱系數。由于接觸式的熱流計是已知導熱系數的金屬片,通過熱流計的面積一定,厚度一定,導致在傅里葉定律的一維導熱方程里,只有熱流計的上下兩側的溫度差改變,從而改變了熱流密度大小。此時我們認為穿過熱流計的熱流密度近似等于冰樣在熱流計位置處的熱流密度,此時我們認為穿過熱流計的熱流密度近似等于冰樣在熱流計位置處的熱流密度,所以通過冰樣的高度和上下溫度差來計算出冰此時的導熱系數:
4.3? 測量結果
溫控系統將冰樣的上下兩側溫度差控制一定,大致實現了在冰樣的上下兩端的中的熱流計部分的熱流密度是一維傳熱,再由單片機讀取出瞬時的熱流密度,經過一段時間后,熱流密度趨于相對地穩定,如圖5所示。通過主控STM32來讀取出此時的熱流密度,來讀取在這個溫度差的導熱系數。設定上下溫差為10 ℃時,測得的冰的導熱系數為2.38。通過STM32使用串口打印出來的數據,經過Python繪圖來反應半導體控溫系統的溫度曲線,并在串口屏中顯示導熱系數結果。
4.4? 實驗誤差分析
本裝置對照純冰的導熱系數,由于所制造的冰的純度達不到很高的精度,而且制冰時,冰樣中有許多的氣泡,而且樣冰的晶格結構無法保證,導致實驗結果不一致。而且再加上熱流計放入其中,難免熱量不是按照一維的方向流動,也會造成誤差。再加上由于NTC電阻是使用導熱良好的石墨烯導熱片粘貼到冰樣表面,由于會出現粘貼縫隙,也會影響溫度的輸入,從而導致PID的控制出現偏差,導致實驗誤差。但是整體的誤差不算太大,說明裝置測量冰的導熱系數還是比較準確。
5? 結? 論
整個裝置使用半導體制冷片作為制冷工具,并使用熱流計讀取一維熱流密度,同時使用單片機進行數據讀取和處理,最后測量出冰的導熱系數。通過半導體制冷片設置的溫控制冷系統,有著響應快,制冷速度快的優點,在測量冰的導熱系數上有著很好的體現,保證了在測量的時候,能夠精確控制裝置溫度,較好地測量出冰的導熱系數。
參考文獻:
[1] 何進.基于半導體制冷技術的溫度控制系統研究 [D].天津:中國民航大學,2017.
[2] 趙威,張品.熱電制冷技術的研究與應用現狀 [J].制冷,2020,39(3):18-21.
[3] 李志軍,孟廣琳,嚴德成,等.黃河口附近海冰導熱系數的室內測試方法 [J].海洋環境科學,1992(1):39-43.
[4] 姚凱,鄭會保,劉運傳,等.導熱系數測試方法概述 [J].理化檢驗:物理分冊,2018,54(10):741-747.
[5] 宋炳輝,馮葉磊,張欣,等.基于半導體制冷片的恒溫控制系統的測試與仿真 [J].制冷,2018,37(3):7-10.
[6] 韓飛,李勍,付遠明,等.接觸式熱流計校準裝置的研制 [J].工業計量,2019,29(S1):27-30.
[7] 范羽.電流變送器原理及在工業上的應用 [J].廣西輕工業,2010,26(5):33-35.
[8] 李丹,蔡靜.基于半導體制冷片的高精度控溫電路系統設計 [J].計測技術,2017,37(2):19-21+39.
[9] 王祎晨.增量式PID和位置式PID算法的整定比較與研究 [J].工業控制計算機,2018,31(5):123-124.
[10] 白乙拉,關博,劉丹.南極海冰導熱系數優化辨識 [J].內蒙古民族大學學報:自然科學版,2010,25(4):361-364.
作者簡介:劉奧成(2002.09—),男,漢族,湖南益陽人,本科在讀,研究方向:電子信息。
收稿日期:2023-04-03
基金項目:湖北省大學生創新創業計劃項目(S202211072062)
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36