基于高速公路物聯傳感動態數據的三維可視化研究
2023-11-22 10:46:17翟銳雷志剛
現代信息科技 2023年19期
翟銳 雷志剛
摘? 要:該研究運用三維GIS技術、傾斜攝影技術、三維可視化展示與交互技術等,打造一套能夠對高速公路物聯傳感動態數據進行空間定位、空間分析的可視化地理信息平臺。基于高速公路真實地形地貌在三維空間中直觀展示物聯傳感動態數據并進行動態分析,提升高速公路數字化和智能化管理水平,為相關人員提供基于可視化場景的輔助決策,提升高速公路管養工作效能,為高速公路物聯傳感動態數據的三維可視化提供一定的參考借鑒。
關鍵詞:高速公路;物聯傳感;橋梁立柱位移監測;橋下空間視頻監控;GIS WEBGL;Ceisum;視頻融合
中圖分類號:TP391.4 文獻標識碼:A? 文章編號:2096-4706(2023)19-0185-06
Research on 3D Visualization Based on Expressway IOT Sensing Dynamic Data
ZHAI Rui1, LEI Zhigang2
(1.Jiangsu Yanjiang Expressway Co., Ltd., Nanjing? 210016, China;
2.Jiangsu Yearning Engineering Technology Group Co., Ltd., Nanjing? 210019, China)
Abstract: This study utilizes 3D GIS technology, oblique photography technology, 3D visualization display and interaction technology, etc. to create a visual geographic information platform that can perform spatial positioning and analysis of expressway IOT sensing dynamic data. Based on the real terrain and topography of highways, IoT sensing dynamic data is visually displayed and dynamically analyzed in 3D space, improving the digitalization and intelligent management level of highways, providing relevant personnel with auxiliary decision-making based on visual scene, improving the efficiency of highway management and maintenance work, and providing certain reference for the 3D visualization of IoT sensing dynamic data of highways.
Keywords: expressway; IOT sensing; bridge column displacement monitoring; space video monitoring under the bridge; GIS WEBGL; Ceisum; video fusion
0? 引? 言
滬蘇浙高速公路(江蘇段)起點位于吳江區蘆墟鎮北的蘇滬兩省市交界處,與上海滬青平高速公路相接,經過莘塔、北厙、古池蕩、八都,終點位于吳江區震澤鎮八都北的蘇滬兩省市交界處,與浙江省申蘇滬皖高速公路相接。江蘇段路線全長約50千米,全線橋梁超70座,橋梁日常管養工作量較大,尤其體現在橋下空間事件主動監測、橋梁立柱(獨柱墩)位移防傾覆監測、橋梁下穿通道超高車輛主動預警監測等。基于高速公路橋梁運行狀態的動態控制和智能化精準管控需求,滬蘇浙高速公路所屬管理公司于2020—2021 年率先試點開展物聯技術與三維可視化技術在橋梁事件主動監測中的應用,試點探索運用新技術提質降本增效。
1? 研究內容
運用物聯技術、三維GIS技術、三維可視化技術實現高速公路橋梁三大管養場景技術的新型應用(視頻監控融合AI感知技術與三維可視化技術在橋下空間事件主動監測中的應用、物聯網與三維可視化技術在橋梁立柱(獨柱墩)位移防傾覆監測中的應用、物聯網技術在橋梁下穿通道超高車輛主動預警中的應用)。基于物聯技術,將所采集的物聯數據放置在高速公路三維地理信息模型中,結合真實的地理位置進行空間定位、直觀展示和動態分析,提供可視化場景下的輔助決策支持,提升高速公路橋梁數字化和智能化管理水平,提升高速公路橋梁管養工作效能。
2? 技術路線
本研究成果基于Cesium進行Web端開發。Cesium是一個基于JavaScript編寫、使用WebGL進行硬件加速圖形化的地圖引擎,由AGI公司于2011年創建,是一種輕量級的開源三維WebGIS開發框架,它支持2D、2.5D、3D形式的地圖展示,可集成多源異構數據,支持多終端跨平臺瀏覽。對于三維地球空間數據而言,Cesium是現階段最合適的開發工具。
基于Cesium的陰影貼圖原理,結合自定義攝像頭調整可以做到將高速公路監控視頻與道路三維環境無縫融合。
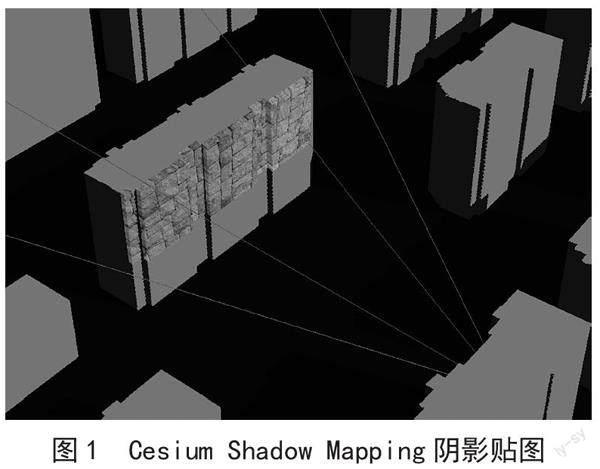
2.1? Cesium Shadow Mapping陰影貼圖
陰影貼圖(Shadow Mapping)是在三維計算機圖形中加入陰影的過程。陰影貼圖的概念則是在1978年由Lance Williams在“在曲面上投射陰影”這篇論文中率先提出的。該方法當前已廣泛應用于場景預渲染,如圖1所示。
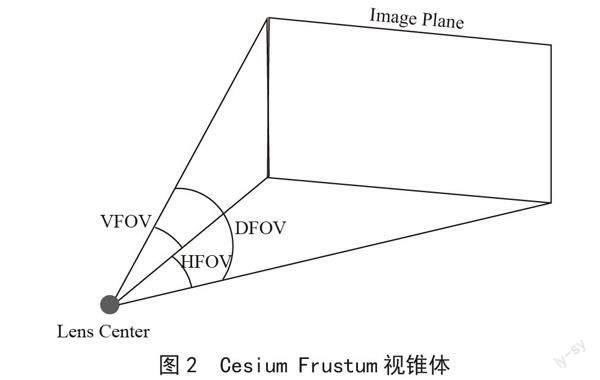
2.2? Cesium Frustum視錐體
視錐體(Cesium Frustum)是當前3D行業最重要的透視模型,若要深入地理解視錐,首先要區分透視和正交的區別。正交與透視是對立統一的,當視點距離物體無窮遠時,視野角度無窮小,此時的透視就是正交。透視投影是指模擬物理世界的規律,將眼睛或相機抽象成一個點,此時視錐體內物體投影到視平面上的物體滿足近大遠小的規律,而正交投影的所有投影射線都是平行的,物體大小不隨距離變化而變化,如圖2所示。
2.3? Cesium Camera控制相機
CesiumJS中的Camera控制場景的視圖。有很多方法可以操作Camera,如旋轉(Rotate)、縮放(Zoom)、平移(Pan)和飛到目的地(flyTo)。CesiumJS可借助鼠標和觸摸事件處理與Camrea的交互,通過API以編程方式操作攝像機。
Camera表示Camera當前位置、方向、參考幀和視圖截錐的狀態。上面的Camera向量在每一幀中都是正交的。
*move和*zoom函數平移Camera的位置按照它的方向或指定的方向矢量,方向保持固定不變。
*look和*twist函數旋轉Camera的方向比如向上、向右矢量,位置保持固定不變。
結合以上三種關鍵方法,通過視頻流攝像頭的位置配準即可實現物聯網視頻流與傾斜攝影三維的無縫融合,如圖3所示。
2.4? Cesium Vertex Shader著色器
Vertex Shader(頂點著色器)和Fragment Shader(片元著色器)是可編程管線。可編程管線是指這個操作可以動態編程而不必寫死在代碼中。可動態編程實現這一功能一般都是腳本提供的,在OpenGL ES中也一樣,編寫這樣腳本的能力是由著色語言GLSL提供的。可編程管線的引入,方便動態修改渲染過程,無須重寫編譯代碼。
2.4.1? Cesium Vertex Shader頂點著色器
頂點著色器分為輸入和輸出兩部分,提供的功能是對輸入的數據進行矩陣變換位置,計算光照公式生成逐頂點顏色,生成/變換紋理坐標,并且把位置和紋理坐標這樣的參數發送到片段著色器,如圖4所示。
2.4.2? Cesium Fragment Shader片元著色器
片元著色器的工作流程如下:Vertex Program收到系統傳遞給它的模型數據后,將模型數據處理成后續需要的數據(但至少要包含這些頂點的位置信息)進行輸出,緊接著系統對Vertex Program輸出的頂點數據進行插值,并將插值結果傳遞給Fragment Program,Fragment Program根據這些插值結果計算最終屏幕上的像素顏色,如圖5所示。
3? 應用場景與成果展示
3.1? 空間事件主動監測
當前高速公路視頻監控方案覆蓋了橋面管理,已實現橋面路況監控數據實時查看,尚未覆蓋橋梁橋下空間管理。現通過在道路重點監測橋梁橋下的重要部位設置視頻監控點,不受時空影響,可隨時隨地對橋梁下部空間及結構物進行遠程全過程動態管控,實時查看橋梁下部空間高清畫面,加強空間占用排查,確保橋下空間健康,有效整治橋下空間,消除橋梁安全隱患,確保橋梁安全暢通運行。運用物聯網+AI技術實現橋梁主動性、智能化監測。基于對橋下空間事件實時、全天候的主動監測,實時感知橋下安全隱患,并將安全隱患在橋梁BIM模型中快速定位與可視化預警,有效解決當前橋梁日常管養過程中普遍存在的“被動式”管養及橋梁財產損失追責難問題。
3.1.1? 多應用場景
多應用場景包括橋下空間周界入侵主動識別與預警、橋下空間火焰與煙霧主動識別與預警、橋下裂縫、航道橋墩撞擊、船舶頂部剮蹭監測。各應用場景方案如下:
1)橋下空間周界入侵主動識別與預警:在橋下關鍵部位安裝周界相機,融合AI感知,實現橋下空間周界入侵智能識別。識別場景包括橋下堆積物、橋下非法施工、橋下非法停車、橋下非法建筑、橋下流浪人員驅趕。
2)橋下空間火焰與煙霧主動識別與預警:在橋下關鍵部位安裝火焰檢測相機,實時監測火災隱患。設備支持火焰檢測、煙霧報警,可實現橋下空間火災主動監控與預警。
3)橋下裂縫、航道橋墩撞擊、船舶頂部剮蹭監測:在橋下關鍵部位安裝400萬像素高清球機,借助監控裝置實現遠程在線實時查看橋下頂部開裂(支座損壞、蓋梁裂縫、立柱破損)、船舶頂部剮蹭監控(超高船舶通過橋梁時碰撞橋梁頂部)、航道橋墩撞擊(船舶樁基航道防撞墩甚至主墩)等現場詳細記錄,同時高清視頻回放有利于聯合相關部門對肇事船舶進行追責。目前暫不能實現橋墩樁基、頂部剮蹭等主動預警。
3.1.2? 系統功能概述
本應用場景實現橋下空間視頻流數據集成、橋下空間事件預警等三維可視化展示,具體實現功能如下:
1)橋下空間視頻監控點接入沿江高速滬蘇浙管理中心,支持沿江高速管理人員、滬蘇浙管理中心人員及其他授權人員在線遠程實時查看視頻數據。系統支持在PC端查看橋梁橋下空間現場視頻等功能,如圖6所示。
2)基于視頻監控點位BIM模型、橋梁真實地理位置,快速掌握道路各橋梁橋下視頻監控點安裝位置、安裝數量、安裝時間及設備規格參數。
3)系統支持一張圖三維可視化展示各橋梁橋下空間視頻監控運行狀態與預警提醒,如攝像頭異常狀態用紅色標識高亮顯示,異常預警以氣泡窗口展示預警信息。預警內容包括時間、橋梁名稱、預警類型(入侵、火災)、預警位置、預警信息、事件視頻數據。
4)實時采集視頻監控設備預警數據,實現監測預警數據在高速公路三維數字模型中快速定位,向指定管理人員推送報警信息,第一時間排查及解決橋下空間隱患問題。報警內容包括報警時間、橋梁名稱、預警類型(入侵、火災)、預警位置、預警信息。
5)橋下空間視頻監控點支持設置巡檢預置點,實現橋下空間每日自動巡檢,自動巡檢過程中支持鏡頭焦距變化,無須手動切換或調整鏡頭焦距、觀測范圍。
6)為橋下事件處理提供證據。前端攝像頭自動抓拍現場事件畫面,系統支持查看、下載事件圖像與視頻數據,翔實記錄現場事件全過程。
3.2? 高速公路橋梁立柱(獨柱墩)位移防傾覆監測
通過運用各類傳感器(智能傾角計、水平位移計、支座位移計)、采集設備(萬能通用采集儀)、傳輸設備(4G網關),將各監測點信息實時傳輸至系統,實現高速公路橋梁立柱(獨柱墩)變形、位移、傾角等動態監測。系統基于各監測指標參數數值、變化趨勢,通過合理的計算和分析對橋梁工作狀態進行評估和預報,動態掌握橋梁立柱位移傾斜發展態勢。同時通過對位移傳感器、傾角儀設定安全閾值,對結構監測狀態做出即時評估,達到安全預警的目的,為橋梁立柱維護以及加固維修提供決策依據,為橋梁管理人員提供及時、準確的位移監測數據,保障高速公路橋梁立柱(獨柱墩)的安全運營,如圖7所示。
橋梁結構防傾覆位移在線監測系統主要由三大部分組成,分別是數據采集設備、網絡傳輸設備、遠程控制中心。通過在橋梁支座上安裝位移傳感器,實時監測位移數據變化。通過在橋梁立柱轉角安裝傾角儀,實現橋梁立柱傾斜數據變化。通過對位移傳感器、傾角儀設定的安全閾值,對結構監測狀態做出即時評估,達到安全預警的作用,如圖8所示。
系統功能如下:
1)系統建立各橋梁立柱傳感器電子臺賬,一橋一檔。檔案內容包括橋梁名稱、橋梁位置、傳感器類型與數量、橋梁立柱編號、傳感器安裝位置、傳感器安裝時間、傳感器安裝單位。系統支持多條件快速檢索傳感器臺賬信息。
2)系統支持一張圖三維可視化展示各橋梁傳感器的運行狀態數據。顯示內容包括橋梁名稱、立柱橋墩號、傳感器安裝位置、傳感器類型、傳感器名稱、傳感器編號、傳感器運行狀態、傳感器安裝時間、傳感器數據監測時間、位移實時監測數據、位移狀態是否異常,如圖9所示。
3)系統支持異常預警通知。通過網絡實時傳輸監測數據,及時對異常數據進行報警。支持平臺在線報警、移動端報警、短信通知。報警內容包括報警時間、橋梁名稱、立柱橋墩號、傳感器名稱、安裝位置、報警類型、異常報警數據。
4)系統支持各傳感器歷史數據查詢,支持按傳感器類型、橋梁名稱、立柱編號查詢傳感器歷年監測數據,支持導出統計分析數據。
5)系統建立預警數據臺賬,支持按橋梁分類在線匯總查看預警記錄、支持按預警數據數量行中橋梁立柱異常運行狀態進行排統計,支持導出統計數據。統計內容包括排名、橋梁名稱、橋梁立柱、預警異常類型(選擇位移/傾斜)、預警次數。
3.3? 穿通道超高車輛主動預警
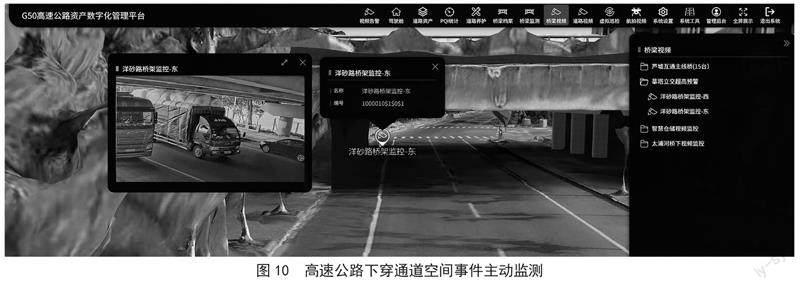
通過在橋梁下穿通道兩側安裝立桿,立桿及立桿橫架上分別安裝紅外對射探測器、抓拍攝像機、聲光語音警報器,對進入警戒區域的車輛進行實時超高檢測,發現超高車輛時啟動聲光語音報警器對超高車輛進行燈光和語音警報,主動提醒車輛駕駛員,正確引導車輛通行。如果超高車輛駕乘人員不聽勸告繼續前進,則啟動抓拍攝像機抓拍超高車輛照片(可以清晰辨認車輛車牌號)并通過網絡實時傳送給系統,系統將警報信息主動推送至道路管理人員,便于道路管理部門做出相應的應急處理,如圖10所示。
系統功能:
1)橋下下穿通道視頻監控點接入沿江高速滬蘇浙管理中心,支持沿江高速管理人員、滬蘇浙管理中心人員及其他授權人員在線遠程實時查看視頻數據。系統提供在PC端查看現場實時視頻數據等功能。
2)系統實時推送事件預警通知,支持PC端發送通知信息。預警通知內容包括事件時間、下穿通道名稱、下穿通道地點、超高車輛抓拍照片。
3)系統支持一張圖展示各下穿通道超高車輛刮撞預警信息(事件時間、地點、超高車輛抓拍照片)。支持查看、下載事件圖像與視頻數據,便于快捷取證追責。
4)系統支持對各下穿通道車輛超高刮撞事故率進行排名統計,方便管理人員精準開展橋下下穿通道限高管理工作,有效降低事故率。統計內容包括排名、下穿通道名稱、下穿通道地點、事故次數。
4? 結? 論
隨著物理網技術在高速公路管理中的廣泛應用,基于物聯傳感器的多種動態數據的綜合三維可視化展示成為新的技術挑戰。利用基于Webgl技術的Cesium等三維前端框架可為交通物聯傳感數據的實時展示提供豐富的解決方案。通過基于Webgl的陰影貼圖、視椎體、攝像頭、著色器等開發可實現動態傳感數據、實時視頻流與三維場景的無縫融合,使得物聯動態數據與三維場景可以進行更為直觀的展示。隨著高速公路管理方式的不斷升級,物聯傳感數據的數據格式也在不斷地豐富,其三維可視化展示仍然需要進一步的研究,為高速公路物聯傳感動態數據的三維可視化提供一定的參考借鑒。
參考文獻:
[1] 王劍倫,邱巍,周云龍,等.基于物聯網的高速公路試驗檢測管理平臺開發 [J].科技創新與應用,2022,12(3):192-196.
[2] 曹祎楠,王佳,顧大鵬.面向多源數據集成的高速公路數字化方法 [J].科學技術與工程,2019,19(19):214-221.
[3] 周勇帥.基于Cesium框架實現傾斜攝影單體化的方法研究 [D].成都:成都理工大學,2021.
[4] 張永強,王波,申茂廷.基于Cesium的3DWebGIS三維場景加載及開發 [J].河南科技,2021,40(21):8-10.
[5] 馬瞳宇,崔靜,儲鼎.基于WebGL的實景三維場景與視頻監控圖像融合技術研究 [J].測繪與空間地理信息,2020,43(S1):80-83.
作者簡介:翟銳(1977—)男,漢族,江蘇淮安人,高級工程師,本科,主要研究方向:高速公路工程養護與管理;雷志剛(1983—),男,漢族,江蘇南京人,高級工程師,本科,主要研究方向:高速公路信息化與智能化管理。
收稿日期:2023-04-03
猜你喜歡
世界科學技術-中醫藥現代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
傳媒評論(2019年4期)2019-07-13 05:49:14
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
山東工業技術(2016年15期)2016-12-01 05:31:04
中國交通信息化(2016年9期)2016-06-06 07:42:10
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06