基于雙層協(xié)同架構(gòu)的高速公路車(chē)輛合流決策與規(guī)劃方法
2023-11-22 13:13:02姜圣丁閃閃彭峰
大連交通大學(xué)學(xué)報(bào) 2023年5期
姜圣,丁閃閃,彭峰
(1.中國(guó)信息通信研究院,江蘇 南京 210024;2.華設(shè)設(shè)計(jì)集團(tuán)股份有限公司,江蘇 南京 210014; 3. 武漢理工大學(xué) 交通與物流工程學(xué)院,湖北 武漢 430070)
合流區(qū)是高速公路的瓶頸,也是交通擁堵的高發(fā)地區(qū)[1]。在智能網(wǎng)聯(lián)環(huán)境下,可以對(duì)高速合流區(qū)主線和匝道的車(chē)輛進(jìn)行協(xié)同決策,首先對(duì)合流區(qū)車(chē)輛進(jìn)行通行次序決策,然后進(jìn)行協(xié)同控制。
車(chē)輛通行次序的決策算法分為基于優(yōu)化和基于啟發(fā)兩種。Sun等[2]提出一種混合交通流下的匝道合流協(xié)同決策算法。Pei等[3]利用動(dòng)態(tài)規(guī)劃進(jìn)行合流區(qū)車(chē)輛通行次序決策。先進(jìn)先出策略(First-In-First-Out,FIFO)是典型的基于啟發(fā)的次序決策算法,車(chē)輛的通行次序取決于到達(dá)合流區(qū)的時(shí)間。通行次序確定后,需要對(duì)合流區(qū)車(chē)輛進(jìn)行協(xié)同控制。目前研究集中在合流區(qū)車(chē)輛協(xié)同控制的分布式解決方案上。Xu等[4]基于簡(jiǎn)單的決策規(guī)則得到通行次序,將合流區(qū)車(chē)輛的協(xié)同控制問(wèn)題轉(zhuǎn)化為優(yōu)化問(wèn)題。蔣明智等[5]基于深度強(qiáng)化學(xué)習(xí)提出了一種漸進(jìn)式價(jià)值期望估計(jì)的多智能體協(xié)同控制算法。Karimi等[6]提出了面向混合合流場(chǎng)景的分層控制框架。
綜上所述,盡管?chē)?guó)內(nèi)外學(xué)者針對(duì)高速公路合流問(wèn)題開(kāi)展了不少研究,但仍存在以下問(wèn)題:當(dāng)車(chē)輛數(shù)增加,基于優(yōu)化的車(chē)輛通行次序決策算法計(jì)算耗時(shí)會(huì)急劇增加;基于啟發(fā)的決策算法很多情況下無(wú)法得到最優(yōu)解或足夠好的次優(yōu)解。
基于此,本文提出高速公路合流決策與規(guī)劃的雙層框架,從而實(shí)現(xiàn)車(chē)輛平穩(wěn)安全合流的總體目標(biāo)。首先,對(duì)合流區(qū)車(chē)輛通行次序決策;其次,進(jìn)行合流區(qū)車(chē)輛協(xié)同控制;最后,開(kāi)展安全與效率評(píng)估,檢驗(yàn)研究協(xié)同控制算法的有效性。通過(guò)仿真,基于高速公路合流區(qū)真實(shí)交通流數(shù)據(jù),分別從個(gè)體車(chē)輛行車(chē)風(fēng)險(xiǎn)層面及交通流安全和效率層面對(duì)人工駕駛和協(xié)同控制兩種工況進(jìn)行對(duì)比評(píng)估,得到協(xié)同控制顯著提升合流安全性與提高交通流效率的結(jié)論。
1 車(chē)輛通行次序決策
本文提出了一個(gè)雙層協(xié)同架構(gòu)的合流決策與規(guī)劃方法。其中,上層采取基于分組的協(xié)作式策略用于決策,下層利用考慮車(chē)車(chē)通信延遲的多智能體一致性理論。
1.1 通行次序決策
車(chē)輛通行次序決策用于規(guī)劃車(chē)輛通行序列,以便合流前對(duì)合流區(qū)車(chē)輛進(jìn)行協(xié)同控制,從而保證合流安全以及降低能源消耗。合流區(qū)車(chē)輛通行次序決策基于車(chē)輛進(jìn)入匝道控制區(qū)的初始狀態(tài),在保障合流區(qū)車(chē)輛安全的前提下,以總通行時(shí)間最短為決策目標(biāo),得到主線和匝道兩線車(chē)輛的最優(yōu)通行次序。車(chē)輛通行次序決策可以分為兩個(gè)部分。
(1)車(chē)輛抵達(dá)合流點(diǎn)最短時(shí)間
基于車(chē)輛自身傳感器、車(chē)車(chē)通信、車(chē)路協(xié)同技術(shù),結(jié)合相關(guān)計(jì)算公式得到通行次序決策所需基本參數(shù)符號(hào)及其含義,見(jiàn)表1。
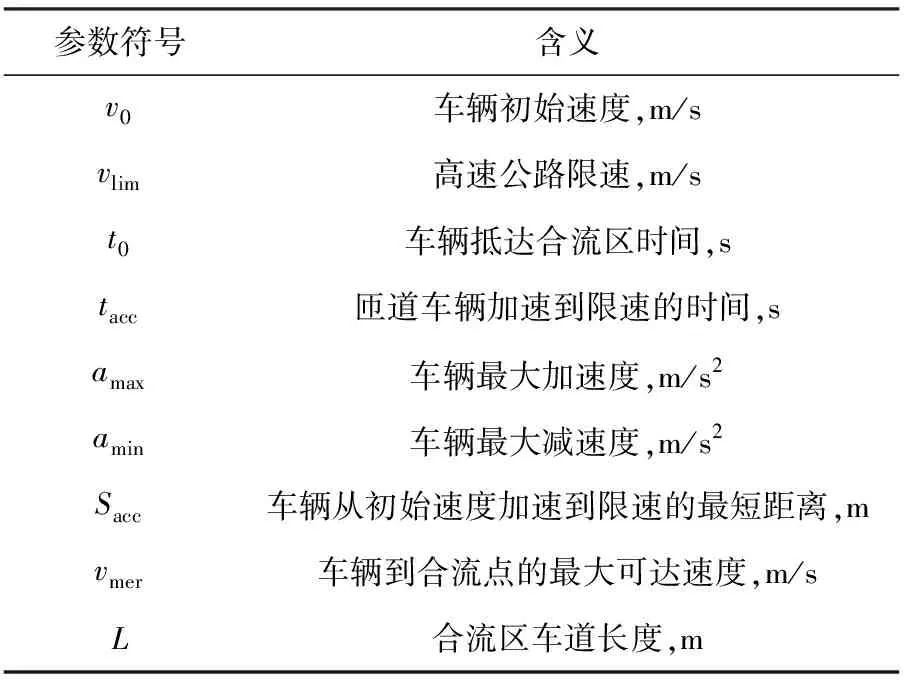
表1 通行次序決策所需基本參數(shù)符號(hào)及其含義
匝道車(chē)輛速度通常比主線車(chē)輛速度低,當(dāng)匝道車(chē)道匯入主線車(chē)道前需要加速。基于公路限速,可以得到匝道車(chē)輛加速到限速的最短時(shí)間,即:
tacc=(vlim-v0)/amax
(1)
從而可以得到從初始狀態(tài)到加速到限速的距離:
Sacc=(vlim2-v02)/2amax
(2)
由于合流控制區(qū)車(chē)道長(zhǎng)度限制,車(chē)輛行駛到合流點(diǎn)會(huì)有兩種情況。當(dāng)車(chē)輛行駛到合流點(diǎn)時(shí),速度小于高速公路限速,無(wú)法加速到高速公路限速。或者車(chē)輛在抵達(dá)合流點(diǎn)前,就已經(jīng)加速到高速公路限速。
當(dāng)加速起始點(diǎn)到合流點(diǎn)距離比加速距離短時(shí),匝道車(chē)輛無(wú)法加速到主線限速速度,從而匝道車(chē)輛到合流點(diǎn)的時(shí)間為:
(3)
當(dāng)加速起始點(diǎn)到合流點(diǎn)距離比加速距離長(zhǎng)時(shí),匝道車(chē)輛先加速到限速速度,然后勻速到達(dá)合流點(diǎn),抵達(dá)合流點(diǎn)的時(shí)間為:
(4)
主線車(chē)輛抵達(dá)合流點(diǎn)的最短時(shí)間計(jì)算方法與匝道車(chē)輛類(lèi)似,車(chē)輛從合流區(qū)起點(diǎn)到合流點(diǎn)的最短時(shí)間為:
(5)
(2)車(chē)輛通行序列分配
合流區(qū)車(chē)輛通行次序決策需要在保證車(chē)輛安全的前提下,實(shí)現(xiàn)總通行時(shí)間以及通行延誤最短,即定義成本函數(shù):
(6)
式中:tseq(i)為通行次序i中合流區(qū)車(chē)輛最后抵達(dá)合流點(diǎn)的時(shí)間;tseq(i),j為在通行次序i中第j輛車(chē)被分配的通行時(shí)間;tmin,j為第j輛車(chē)抵達(dá)合流點(diǎn)所需最短的時(shí)間;w1和w2為權(quán)重系數(shù),該權(quán)重系數(shù)的取值根據(jù)不同的場(chǎng)景進(jìn)行人工調(diào)整,以獲取最好的優(yōu)化效果。成本函數(shù)中兩項(xiàng)分別是某一通行次序下合流區(qū)車(chē)輛總通行時(shí)間和該通行次序的情況下的總延誤時(shí)間。
為避免碰撞,需要保證相鄰車(chē)輛的適當(dāng)車(chē)頭間距,即:
tseq,i-tseq,i+1≥Δt
(7)
因此建立合流區(qū)車(chē)輛通行次序決策的目標(biāo)函數(shù)和約束如下:
(8)
考慮到車(chē)輛動(dòng)力學(xué)特性需要對(duì)加速度進(jìn)行約束,設(shè)置最高加速度和最低加速度。當(dāng)車(chē)輛速度過(guò)低時(shí),會(huì)影響到合流區(qū)的通行效率,因此需要對(duì)車(chē)輛速度進(jìn)行約束。
基于分組規(guī)則,匝道合流區(qū)車(chē)輛被分為若干組,同一組車(chē)輛作為一個(gè)車(chē)輛隊(duì)列,被分配一個(gè)通行次序。基于分組規(guī)則,合流區(qū)7輛車(chē)輛被分為4組,見(jiàn)圖1。基于物理約束,可以構(gòu)建通行次序可行解的狀態(tài)空間。
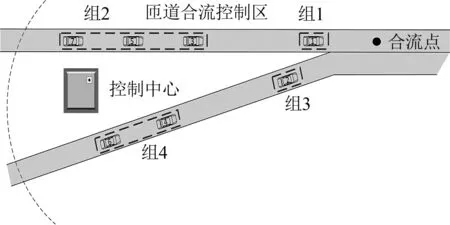
圖1 合流區(qū)車(chē)輛組隊(duì)協(xié)同通行
合流區(qū)7輛車(chē)輛組隊(duì)后具有6個(gè)通行次序可行解。基于通行次序,可計(jì)算在該通行次序下每輛車(chē)到達(dá)合流點(diǎn)的時(shí)間。結(jié)合車(chē)輛抵達(dá)合流點(diǎn)最短時(shí)間,可以計(jì)算出每一種通行次序的成本函數(shù)Jseq,從而可以得出最優(yōu)通行次序G*。
1.2 分組策略最優(yōu)性分析
為驗(yàn)證基于分組策略的合流通行優(yōu)化方法是否具備先進(jìn)性,現(xiàn)就基于分組策略的合流通行優(yōu)化方法和單車(chē)通行策略方法這兩種通行次序決策形式進(jìn)行比較。
以圖2為例,合流區(qū)有3輛自動(dòng)駕駛車(chē)輛。車(chē)輛1和2之間的車(chē)頭時(shí)距小于閾值,基于組隊(duì)規(guī)則,這兩輛車(chē)被分為一組,從而合流區(qū)車(chē)輛被分為2組。基于組隊(duì)通行策略的通行次序有2種,即123和312。當(dāng)車(chē)輛以個(gè)體形式通行,有3種通行次序,即123、312、132。通行次序132是基于分組的通行策略無(wú)法得出的通行次序。現(xiàn)計(jì)算最優(yōu)通行次序?yàn)?32的概率。
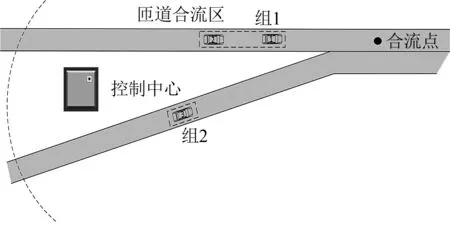
圖2 車(chē)輛組隊(duì)通行場(chǎng)景
通行次序?yàn)?32時(shí),基于通行時(shí)間規(guī)劃算法,可得到各車(chē)抵達(dá)合流點(diǎn)時(shí)間,從而得到通行時(shí)間:
(9)
若此場(chǎng)景下,最優(yōu)通行次序?yàn)?23,則t132≤t123,t132≤t312。現(xiàn)分別討論通行次序?yàn)?23以及通行次序?yàn)?12這兩種情況。基于通行時(shí)間規(guī)劃算法,可得到通行次序?yàn)?23時(shí)車(chē)輛總通行時(shí)間為:
(10)
根據(jù)式(9)和式(10),當(dāng)且僅當(dāng)t132=tmin,1+2Δt時(shí),t132≤t123。為保證通行次序?yàn)?13時(shí)車(chē)輛總通行時(shí)間比通行次序?yàn)?23時(shí)大,該場(chǎng)景中3輛車(chē)的通行時(shí)間需要滿足式(11):
tmin,1+Δt≥tmin,3tmin,1+Δt≥tmin,3
(11)
同理可得通行次序?yàn)?12時(shí)車(chē)輛總通行時(shí)間為:
(12)
顯然t132≤t312恒成立。因此為保證通行次序132為最優(yōu)解,3輛車(chē)的通行時(shí)間需滿足式(11),等價(jià)于:
hij≤Δt/2
(13)
由于車(chē)頭時(shí)距服從偏移正態(tài)分布,則:
(14)
(15)
(16)
由式(16)可見(jiàn),在該場(chǎng)景中,基于組隊(duì)策略得到的最優(yōu)通行策略比基于個(gè)體車(chē)輛通行得到的最優(yōu)通行策略差的概率趨近于0。
1.3 組隊(duì)最優(yōu)性證明
為進(jìn)一步驗(yàn)證基于組隊(duì)的通行次序決策算法的有效性,將其與基于枚舉法和基于FIFO策略的通行次序決策算法進(jìn)行對(duì)比。
假定車(chē)輛從主線車(chē)道和匝道進(jìn)入合流控制區(qū)的到達(dá)率服從泊松分布[7],對(duì)于每個(gè)車(chē)輛到達(dá)率,進(jìn)行20 min的車(chē)輛到達(dá)模擬。分別記錄下每個(gè)場(chǎng)景中最優(yōu)通行次序的通行時(shí)間成本J以及求解時(shí)間t。


圖3 合流區(qū)20輛車(chē)輛通行次序決策
2 多智能體一致性運(yùn)動(dòng)規(guī)劃
從控制的角度來(lái)看,車(chē)輛隊(duì)列控制的目的是在存在擾動(dòng)、噪聲以及通信延遲的情況下,保證隊(duì)列車(chē)輛的相對(duì)位置以及速度都趨近于期望值:
(17)
式中:ddes為規(guī)劃目標(biāo)車(chē)間距。
本節(jié)采取分布式一致性控制算法,得到隊(duì)列車(chē)輛的控制輸入,使得車(chē)輛位置和速度達(dá)到期望值,從而實(shí)現(xiàn)車(chē)輛隊(duì)列系統(tǒng)的一致性目標(biāo),保證合流區(qū)車(chē)輛平穩(wěn)安全合流。
為實(shí)現(xiàn)合流區(qū)車(chē)輛隊(duì)列的一致性控制目標(biāo),將車(chē)輛隊(duì)列系統(tǒng)當(dāng)作多智能體系統(tǒng),從而將車(chē)輛隊(duì)列系統(tǒng)的控制問(wèn)題轉(zhuǎn)化為多智能體動(dòng)態(tài)系統(tǒng)的一致性問(wèn)題。
設(shè)公路合流區(qū)有N輛車(chē)輛,基于車(chē)輛相對(duì)距離,可以將這N輛車(chē)輛視為一個(gè)N輛車(chē)的隊(duì)列(圖4)。在前車(chē)領(lǐng)航車(chē)跟隨(PFL)通信拓?fù)浣Y(jié)構(gòu)下,結(jié)合V2V通信技術(shù),車(chē)輛可以接收來(lái)自前車(chē)以及頭車(chē)的運(yùn)動(dòng)狀態(tài)信息,包括絕對(duì)位置、速度和加速度。
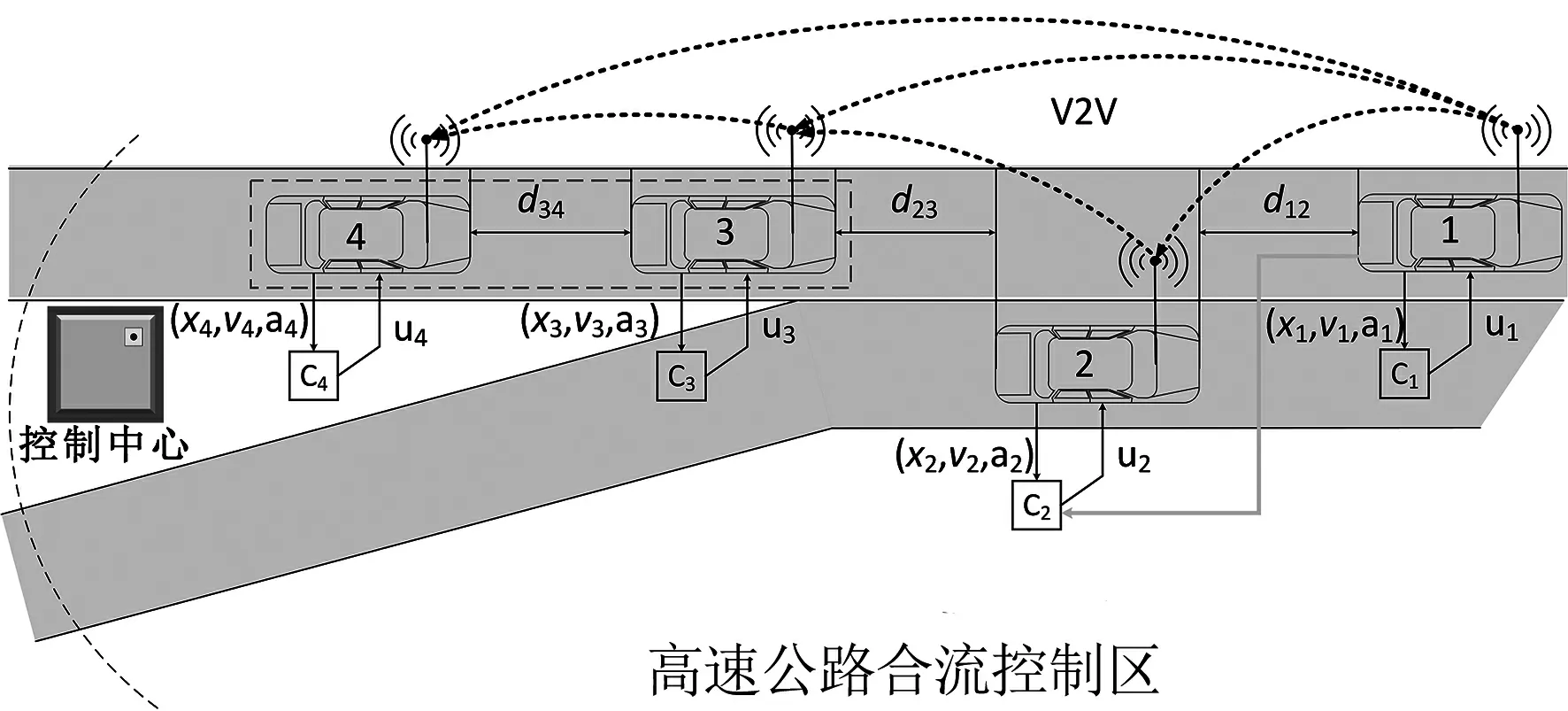
圖4 基于分布式一致性控制合流區(qū)車(chē)輛協(xié)同控制
節(jié)點(diǎn)動(dòng)力學(xué)模型采用三階線性模型用于表征車(chē)輛縱向動(dòng)力學(xué)[8]。車(chē)輛縱向動(dòng)力學(xué)模型為:
(18)
式中:xi(t)、vi(t)、ai(t)分別為隊(duì)列車(chē)輛i在t時(shí)刻的位置、速度和加速度,i=0,1,…,N,其中i=0表示為頭車(chē);ui(t)表示車(chē)輛i在t時(shí)刻的控制輸入;Ti表示傳動(dòng)系的時(shí)間常數(shù)(Ti>0)。
在車(chē)輛組隊(duì)協(xié)同合流控制系統(tǒng)中,頭車(chē)即為決策得到的最優(yōu)通行次序中第一個(gè)通過(guò)合流點(diǎn)的車(chē)輛。通常,頭車(chē)以期望速度勻速行駛。不失一般性,當(dāng)頭車(chē)的初始速度不等于期望速度時(shí),可以加入一個(gè)初始速度為期望速度,初始位置為頭車(chē)位置的虛擬頭車(chē)。為保障車(chē)輛平穩(wěn)安全合流,需要保證車(chē)輛隊(duì)列實(shí)現(xiàn)一致性目標(biāo),即:
(19)
然而,隊(duì)列車(chē)輛間的信息交互存在通信延遲。基于通信延遲的時(shí)變隨機(jī)特性,設(shè)計(jì)考慮隊(duì)列車(chē)輛信息交互延遲的分布式一致性控制協(xié)議具有現(xiàn)實(shí)意義[9]。因此,本文提出了考慮通信延遲的分布式一致性控制協(xié)議,可以得到隊(duì)列車(chē)輛的控制輸入,從而實(shí)現(xiàn)車(chē)輛隊(duì)列一致性目標(biāo),控制協(xié)議為:
(20)
3 仿真驗(yàn)證
3.1 仿真案例
仿真采用的部分真實(shí)交通數(shù)據(jù),來(lái)源于數(shù)據(jù)集Mirror-Traffic。該數(shù)據(jù)集是利用路側(cè)視頻以及無(wú)人機(jī)等方式采集典型交通場(chǎng)景中車(chē)輛的行駛軌跡集。采集到的視頻數(shù)據(jù)經(jīng)過(guò)處理矯正后得到各個(gè)場(chǎng)景的車(chē)輛運(yùn)動(dòng)狀態(tài)數(shù)據(jù)集
目前,該數(shù)據(jù)集包含高速公路匝道匯入、匯出、城市快速路匯入場(chǎng)景中的車(chē)輛軌跡數(shù)據(jù)。由于城市快速路入口匝道為雙車(chē)道,因此采用單匝道的高速公路入口匝道的合流區(qū)交通數(shù)據(jù)。該數(shù)據(jù)集包含的匝道合流區(qū)數(shù)據(jù)采集于2020年3月31日8:30,天氣為陰天。高速公路為雙向四車(chē)道,東西走向,入口匝道位于右側(cè),該路段限速80 km/h。
為驗(yàn)證組隊(duì)合流策略和協(xié)同控制算法的有效性,需要從數(shù)據(jù)集中提取典型合流場(chǎng)景中的車(chē)輛行駛狀態(tài)進(jìn)行仿真驗(yàn)證。該數(shù)據(jù)集共有760輛車(chē)的行駛軌跡,合流次數(shù)達(dá)62次。對(duì)數(shù)據(jù)集中的車(chē)輛軌跡數(shù)據(jù)進(jìn)行處理并篩選出典型合流場(chǎng)景。合流區(qū)中9輛車(chē)的車(chē)輛行駛軌跡,見(jiàn)圖5。將t=492 s時(shí)的合流區(qū)車(chē)輛的狀態(tài)作為仿真驗(yàn)證的車(chē)輛初始狀態(tài)。9輛車(chē)輛的真實(shí)狀態(tài)信息作為組隊(duì)協(xié)同控制算法驗(yàn)證的參考。
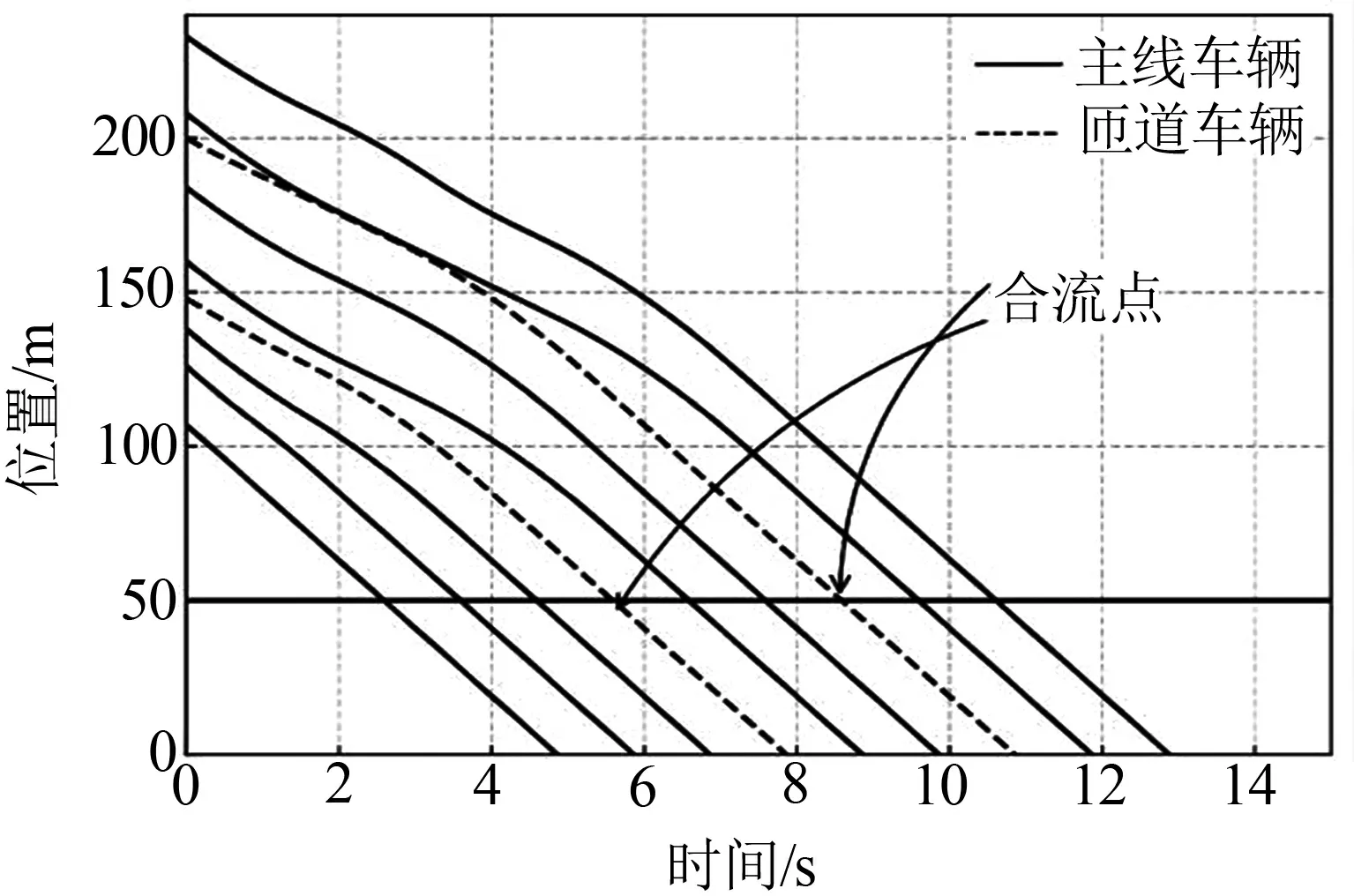
圖5 合流區(qū)車(chē)輛行駛軌跡
合流區(qū)車(chē)輛初始位置見(jiàn)圖6,圖中編號(hào)1~9的合流區(qū)車(chē)輛初始位置分別設(shè)置為107、126、138、148、160、184、200、208、233;車(chē)輛初始速度分別設(shè)置22 、22 、21 、15 、20 、19 、14 、20 、18 m/s。
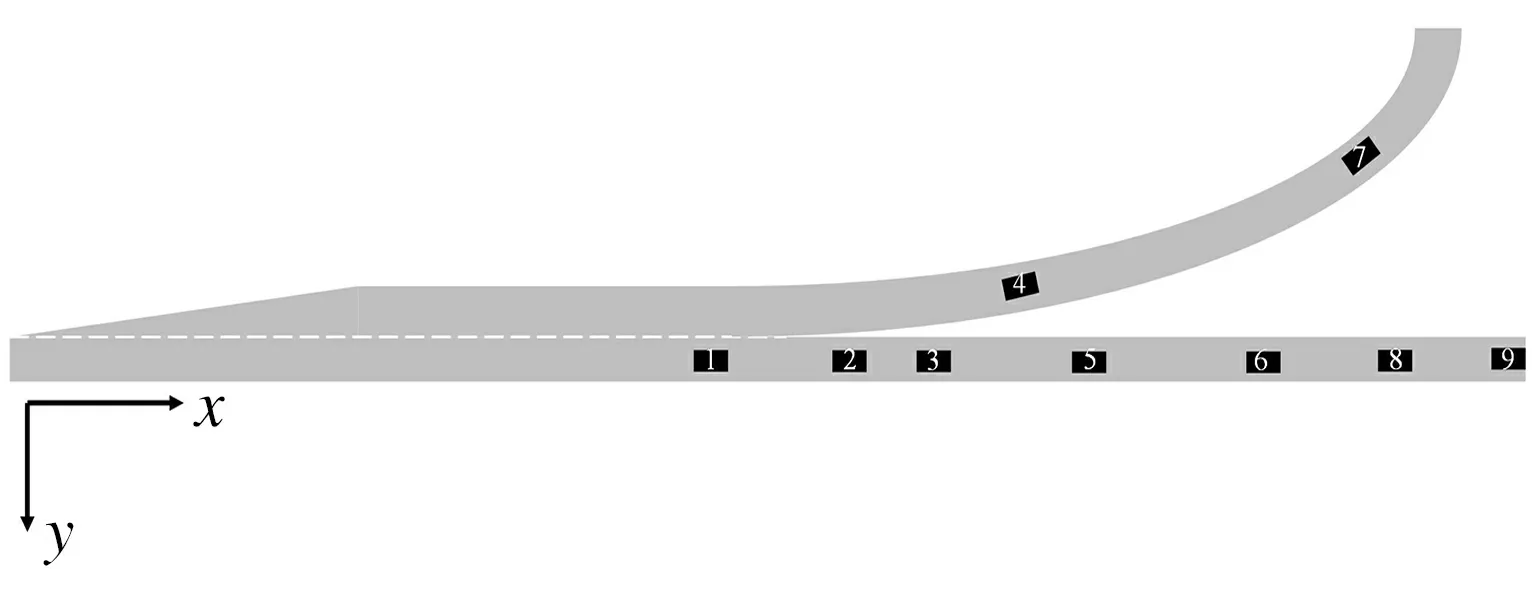
圖6 合流區(qū)車(chē)輛初始位置
基于數(shù)據(jù)集中匝道車(chē)輛的真實(shí)合流位置,將采用組隊(duì)協(xié)同控制算法的協(xié)同合流的合流點(diǎn)定為50 m。
為驗(yàn)證組隊(duì)協(xié)同控制算法,本文提取了高速公路合流區(qū)典型的合流場(chǎng)景中的車(chē)輛軌跡,并將合流區(qū)車(chē)輛的初始狀態(tài)作為組隊(duì)協(xié)同控制算法的輸入。通過(guò)對(duì)比控制前后車(chē)輛運(yùn)動(dòng)狀態(tài)來(lái)評(píng)估組隊(duì)協(xié)同控制算法的有效性。
仿真試驗(yàn)是依托Webots進(jìn)行的。Webots由Cyberbotics公司開(kāi)發(fā),是一款亞微觀的、高逼真度的開(kāi)源多平臺(tái)機(jī)器人仿真軟件。目前,Webots已經(jīng)支持自動(dòng)駕駛車(chē)輛仿真,可以實(shí)現(xiàn)交通場(chǎng)景編輯或者真實(shí)道路地圖導(dǎo)入。由于無(wú)法獲知Mirror-Traffic數(shù)據(jù)集的車(chē)輛數(shù)據(jù)采取時(shí)的真實(shí)地點(diǎn),因此只能基于合流區(qū)道路相關(guān)參數(shù)在Webots中搭建合流區(qū)道路仿真場(chǎng)景。本文基于Webots平臺(tái),搭建了高速公路合流區(qū)道路場(chǎng)景,并設(shè)置了合流區(qū)9輛車(chē)的初始位置。
3.2 結(jié)果分析
本文首先基于車(chē)輛通行次序決策算法得到最優(yōu)通行次序,然后結(jié)合分布式一致性算法對(duì)合流區(qū)車(chē)輛進(jìn)行協(xié)同控制。基于合流區(qū)車(chē)輛的初始位置以及初始速度,隊(duì)列期望速度為22 m/s,期望間距為20 m。
基于組隊(duì)規(guī)則,編號(hào)為1、2、3的車(chē)輛被分為一組,被視為一輛車(chē)。基于物理約束,可以得到21種合流區(qū)車(chē)輛通行次序可行解空間。
結(jié)合車(chē)輛通行時(shí)間分配算法以及基于通行時(shí)間和通行延誤的成本函數(shù),求解獲得最優(yōu)通行次序。不同通行次序的成本見(jiàn)圖7,可知,通行次序編號(hào)為8~21的通行方案的成本相同,即這14種通行方案都是最優(yōu)解。不失一般性,選取編號(hào)9的通行次序作為車(chē)輛通行組隊(duì)方案,即車(chē)輛的通行次序?yàn)?→2→3→4→5→6→7→8→9。

圖7 不同通行次序的成本
在車(chē)輛隊(duì)列系統(tǒng)協(xié)同控制過(guò)程中,假定通行時(shí)延為常數(shù),即τ=0.2 s。車(chē)輛隊(duì)列系統(tǒng)通信拓?fù)洳捎肞FL,即隊(duì)列車(chē)輛只接收來(lái)自前車(chē)和頭車(chē)的縱向位置、縱向速度、縱向加速度信息。結(jié)合分布式一致性協(xié)議,可以得到表示車(chē)輛隊(duì)列系統(tǒng)通信拓?fù)涞睦绽咕仃嚒?/p>
為防止車(chē)輛在協(xié)同控制過(guò)程中速度降低過(guò)快,并滿足車(chē)輛的動(dòng)力學(xué)特性以及乘坐的舒適性,需要增加車(chē)輛的速度約束和加速度約束。車(chē)輛的速度約束和加速度約束分別為:
(21)
式中:vlower為車(chē)輛速度下限,取12 m/s;vlim為公路最高車(chē)速,取22 m/s;ai為車(chē)輛加速度;amin為車(chē)輛最大減速度,取-4 m/s2;amax為車(chē)輛最大加速度,取4 m/s2。
結(jié)合車(chē)輛實(shí)際位置,得到隊(duì)列車(chē)輛的縱向誤差軌跡圖。隊(duì)列車(chē)輛的縱向誤差為:
(22)

合流區(qū)車(chē)輛在協(xié)作合流過(guò)程中的軌跡見(jiàn)圖8。圖中縱坐標(biāo)50 m處表示合流點(diǎn)的位置。從圖中可以看出,匝道車(chē)輛行駛到合流點(diǎn)前,車(chē)輛隊(duì)列系統(tǒng)已經(jīng)達(dá)到穩(wěn)定狀態(tài)。合流區(qū)車(chē)輛位置誤差見(jiàn)圖9,可以看出,隊(duì)列車(chē)輛的縱向誤差都收斂,且縱向誤差均不超過(guò)0.5 m。
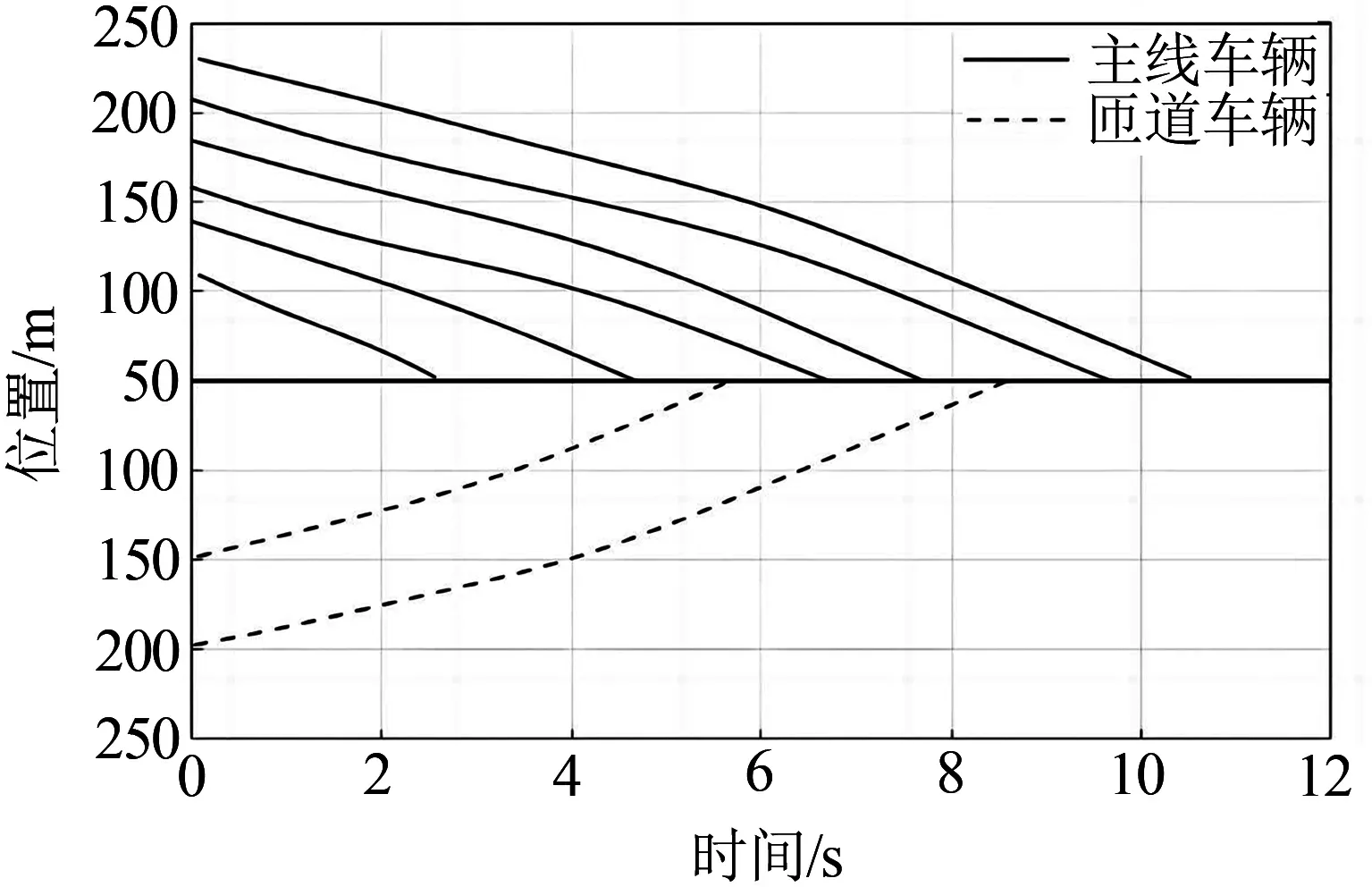
圖8 合流區(qū)車(chē)輛軌跡
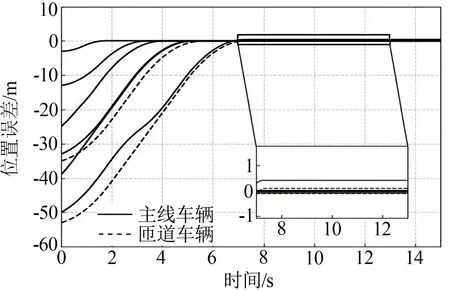
圖9 合流區(qū)車(chē)輛位置誤差
為進(jìn)一步對(duì)比協(xié)同控制前后車(chē)輛合流效率,對(duì)匝道車(chē)輛換道合流時(shí)間、換道合流位置,以及換道合流時(shí)縱向速度進(jìn)行對(duì)比,對(duì)比結(jié)果見(jiàn)表2。

表2 人工駕駛與協(xié)同控制兩種工況匝道車(chē)輛合流指標(biāo)對(duì)比
從表2可以看出,對(duì)合流區(qū)車(chē)輛進(jìn)行組隊(duì)協(xié)同控制后,匝道車(chē)輛合流時(shí)間降低,換道合流時(shí)的速度增加。其中,車(chē)輛4從初始狀態(tài)到換道合流歷經(jīng)11.1 s,組隊(duì)協(xié)同控制后,合流時(shí)間為5.9 s,合流時(shí)間縮短46.8%。另外,車(chē)輛4換道合流時(shí)的速度為17.84 m/s,與前車(chē)速度差為-2.03 m/s,與后車(chē)速度差為-1.57 m/s;車(chē)輛7的合流時(shí)間為16.5 s,利用組隊(duì)協(xié)同控制算法之后,其合流時(shí)間為8.6 s,合流時(shí)間縮短47.9%。車(chē)輛7換道合流時(shí)與前車(chē)的速度差為-3.88 m/s。
可見(jiàn),組隊(duì)協(xié)同控制之后,匝道車(chē)輛的合流時(shí)間縮短。相比于人工駕駛車(chē)輛,利用組隊(duì)協(xié)同控制算法的匝道車(chē)輛行駛到合流點(diǎn)時(shí),其與主線上的前后車(chē)的速度差均為0。這就降低了匝道車(chē)輛換道合流時(shí)的行車(chē)風(fēng)險(xiǎn)。
4 結(jié)論
本文提出了基于最優(yōu)化的合流區(qū)車(chē)輛通行次序決策方法。為減少車(chē)輛通行次序可行解空間,縮短規(guī)劃時(shí)間,并保證找到足夠好的次優(yōu)解,本文采取基于分組的通行次序決策算法。將車(chē)頭時(shí)距小于給定閾值的車(chē)輛組成車(chē)輛隊(duì)列,一個(gè)車(chē)輛隊(duì)列看作一輛特殊的智能網(wǎng)聯(lián)車(chē)輛,然后再進(jìn)行通行次序規(guī)劃。基于物理約束,構(gòu)建分組后合流區(qū)車(chē)輛的通行次序可行解空間,利用最優(yōu)化方法求解得到最優(yōu)通行次序。為驗(yàn)證基于分組通行次序決策的有效性,結(jié)合車(chē)輛合流場(chǎng)景實(shí)例進(jìn)行分析,并利用仿真對(duì)基于枚舉法的通行次序決策方法以及基于FIFO的通行次序決策方法進(jìn)行對(duì)比分析。結(jié)果表明基于分組的通行次序決策算法可以得到近似最優(yōu)解,且求解速度滿足實(shí)時(shí)性要求。
為縮短規(guī)劃時(shí)間,同時(shí)保證找到足夠好的次優(yōu)解,本文采取基于分組的協(xié)作式合流策略。將合流區(qū)車(chē)輛看作一個(gè)特殊的車(chē)輛隊(duì)列系統(tǒng),結(jié)合車(chē)輛隊(duì)列控制算法,可以實(shí)現(xiàn)合流區(qū)車(chē)輛的協(xié)同控制。該方法的關(guān)鍵在于將車(chē)頭時(shí)距小于設(shè)定閾值的車(chē)輛組成車(chē)輛隊(duì)列,將一個(gè)車(chē)輛隊(duì)列看作一輛特殊的自動(dòng)駕駛車(chē)輛,然后再進(jìn)行最優(yōu)通行次序求解。顯然,同一車(chē)輛隊(duì)列內(nèi)車(chē)輛的通行次序是相同的,這就減少了通行次序決策的車(chē)輛數(shù)量,從而可以極大地縮小通行次序空間,減少求解時(shí)間。基于該方法對(duì)合流區(qū)車(chē)輛進(jìn)行協(xié)同控制,能夠提升合流區(qū)交通流安全性,提高交通流效率。
