基于人工智能的圖書館書籍定位機器人自動化控制系統設計
2023-11-28 05:38:24薛謝輝馬同霞
自動化與儀表 2023年11期
薛謝輝,馬同霞
(1.南昌職業大學 工程技術學院,南昌 330500;2.南昌職業大學 經濟管理學院,南昌 330500)
為提高管理效率,提升圖書館管理智能化水平,應用機器人技術進行書籍管理則成為首選方法[1]。機器人用于圖書館后,能夠實現對館內所有書籍的掃描、定位、統計等處理,實現圖書館的智能化服務,并且極大程度提升圖書館的管理效率和服務質量。書籍定位作為機器人在圖書館中的重要作用之一,其能夠精準獲取數據的位置,為圖書尋找提供有效幫助。但是,在實際應用過程中,由于館內書籍的大小、薄厚等均存在差異,因此,機器人在進行書籍定位時,仍舊會發生定位誤差[2]。因此,為保證機器人對于書籍的精準定位,需提升機器人的控制效果。文獻[3]針對該需求,基于多傳感器融合,提出相關控制方法,該方法通過卡爾曼濾波算法實現機器人測距數據和里程數據的融合,在此基礎上獲取機器人的坐標信息,實現機器人控制。但是該方法在應用過程中,對于機器人位姿角的控制誤差較大;文獻[4]則基于ROS 構建機器人模型,在考慮機器人一定角度和距離權重的前提下,利用隨機數算法完成機器人運動規劃,實現機器人控制。該方法在應用過程中,對于突發障礙物的避障效果較差。
為解決控制誤差大,避障效果較差的問題,本文設計基于人工智能的圖書館書籍定位機器人自動化控制系統。
1 圖書館書籍定位機器人自動化控制系統
1.1 書籍定位機器人自動化控制系統結構
書籍定位機器人在應用時需準確定位書籍的位置,為書籍管理提供可靠保障,為保證機器人對于不同大小、不同厚度書籍的定位效果,快速完成書籍的尋找,需提升機器人的控制效果。本文結合書籍定位尋找需求,設計基于人工智能的書籍定位機器人自動化控制系統,系統結構如圖1 所示。本系統整體分為人機交互層、行為評估層、運動規劃層以及機器人執行層,人機交互層可下達機器人運動指令,行為評估層對機器人接受控制后的運動行為進行評估,運動規劃層依據評估結果對機器人進行自主控制,通過機器人執行層執行控制結果。
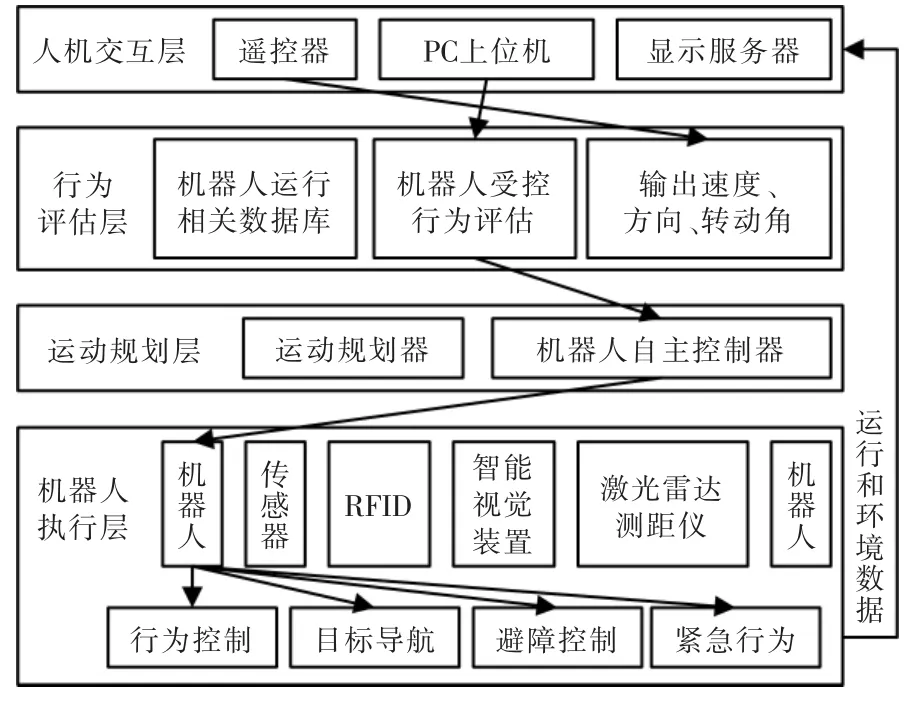
圖1 人工智能書籍定位機器人控制系統結構Fig.1 Structure of positioning robot control system for artificial intelligence
1.2 自主控制器結構
運動規劃層在進行機器人自主控制時,主要依據自主控制器完成,控制器結構如圖2 所示。自主控制器的主要作用是實現遠程端控制、本地端控制兩種控制模式下機器人行為的自主控制,該控制器以TMS320F2812 處理芯片為核心,與上位機、復位電路、傳感器、光電編碼器以及各類串口等相連接,實現圖書館定位機器人的自主控制。其在控制過程中,能夠依據接口電路將控制指令傳送至電機驅動器,完成該驅動器的控制;并且在控制過程中,以eCAN總線為依據,實現該控制器和PC 上位機之間的實時通信,保證控制指令可迅速精準的執行。

圖2 自主控制器結構Fig.2 Autonomous controller structure
1.3 圖書館書籍定位機器人硬件
機器人執行層是系統的基礎支撐,其主要通過機器人實現該層的運行,機器人硬件結構如圖3 所示。依據圖3 可知,該機器人以工控機為核心,并且工控機內設有視頻采集卡、數據采集卡、USB 接口、PCI多串口以及射頻識別,其中視頻采集卡連接智能視覺裝置,數據采集卡連接傳感器、激光雷達測距儀等;PCI 多串口通過串行通信模式的擴展接口實現羅盤、傾角以及射頻識別傳感器和工控機之間的雙向通信;與此同時,通過該雙向通信串口,將工控機和機器人的電機控制器相連接,實現書籍定位機器人的左、右2 個驅動電機、旋轉和俯仰2 個驅動電機的控制,以實現對于機器人位姿角的精準控制。
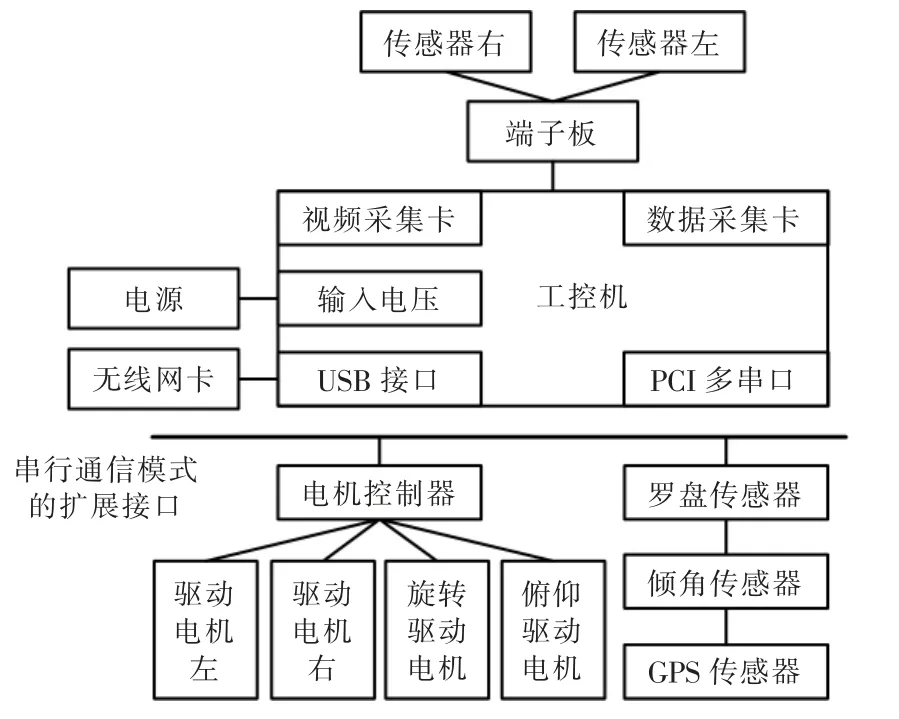
圖3 圖書館書籍定位機器人硬件結構Fig.3 Library book positioning robot hardware structure
1.4 書籍定位機器人的自主控制
1.4.1 機器人作業環境區域識別
由于視覺裝置采集的作業環境圖像為彩色圖像,為精準檢測識別作業環境區域的目標圖像,以為后續的定位控制提供可靠的支撐。因此,利用Roberts算子完成對所采集到彩色圖像的灰度處理,獲取圖像色彩突出部分后,依據色彩分布的梯度變化對圖像進行分割以及邊緣檢測。將視覺裝置獲取的圖書館環境圖像色彩分布用函數f(x,y)表示,其像素點用(x,y)表示,該像素點在x、y 兩個方向上的表達公式為
對于目標圖像(x,y)而言,其區域矩計算公式為
式中:p 和q 均表示階數;s 表示采集圖像的整個區域。
對(x,y)進行二值化處理后,(x,y)=1,此時零界矩m00的計算公式為
式中:m00即為圖像中目標區域的面積,其一階矩計算公式為
目標區域的質心(xc,yc)計算公式為
為了保證該質心區域被更好地識別,文中采用人工聚類方法,對質心位置進行分類,以此獲取機器人書籍定位作業區域。其詳細流程如下所述:
(1)構建聚類中心,將計算獲取的(xc,yc)結果定義為聚類中心;
(2)計算質心樣本數據{X},按照最小距離對計算結果進行劃分,使其歸屬于某個選定的聚類中心
(4)采用計算得出的均值向量作為新的聚類中心,并依據聚類準則,保證函數值最小;
1.4.2 重定位增強方法
獲取機器人作業區域識別結果后,為提升機器人對于書籍的定位精度,自主控制器中設有基于粒子濾波的重定位增強方法,依據該方法完成機器人對書籍的定位。該方法結構如圖4 所示。該方法是在確定作業區域的基礎上,獲取二維柵格地圖和作業區域環境內的語義信息并對其進行遍歷;在此基礎上,依據柵格地圖完成作業區域內書籍所在的環境劃分,使其形成多個功能區塊,并獲取各個區塊的語義信息,將其定義為功能區特征。環境匹配依據語義信息完成,即通過最大似然估計法完成書籍的粗定位,將粗定位結果作為粒子濾波器的先驗知識,以此實現書籍的精定位。

圖4 重定位增強方法結構Fig.4 Repositioning the enhanced method structure
機器人定位可采用連續時間概率計算問題描述,采用貝葉斯和馬爾克夫理念對該問題進行描述為
式中:b(St)表示置信度;St表示在t 時刻下機器人的狀態估計結果;η 表示歸一化因子;ut表示控制量;zt表示機器人搭載的激光雷達獲取的書籍測量數據;m 表示全局地圖。
公式(7)中,包含了2 個部分,分別為預測和更新,其中p(St∣St-1,ut)的主要作用是完成機器人狀態預測,該預測是依據生成的先驗概率完成;p(zt∣St,m)表示測量似然概率,和p(St∣St-1,ut)結合后,完成機器人狀態估計結果更新。
粒子濾波方法在進行機器人精定位時,概率分布通過粒子密度分度表示,b(St)則采用n 個粒子集合表示,其精定位流程為
(1)以t-1 時刻下機器人的狀態估計結果St-1、ut以及機器人運動模型采樣,獲取t 時刻下機器人可能發生的狀態;
(2)通過傳感器觀測模型計算各個粒子包含的觀測數據zt以及地圖匹配度
(3)采用匹配度重采樣處理后,生成后驗概率分布,并通過循環迭代處理后,獲取機器人的位姿結果,實現機器人定位控制,以此可保證機器人對于書籍的定位精度。
2 測試分析
為驗證本文系統在圖書館書籍定位機器人控制中的應用效果,以某市圖書館為實例研究對象,并對該圖書館內使用的書籍定位機器人進行控制測試。該機器人為雙足機器人,其詳細參數如表1所示。

表1 雙足機器人詳細參數Tab.1 Detailed parameters of biped robot
為驗證本文系統應用后,定位的精準性,獲取本文系統應用后,機器人在不同書籍位置高度下,對于不同大小書籍的定位誤差結果(期望誤差低于2.5 mm),如表2 所示。

表2 不同大小書籍的定位誤差結果Tab.2 Results of localization errors of different sizes
根據表2 測試結果可知,本文系統應用后,能夠極大程度提升機器人的定位精度,即使書籍大小尺寸較小時,機器人依舊能夠精準完成書籍定位,誤差結果最大值僅為2.2 mm,在期望誤差方位內。因此,說明本文系統具有良好的機器人控制效果,應用后可保證機器人對于書籍的定位效果。
為驗證本文系統應用后對于機器人的控制效果,獲取機器人的位姿角控制結果,并將控制結果和理想結果進行對比,測試結果如圖5 所示。
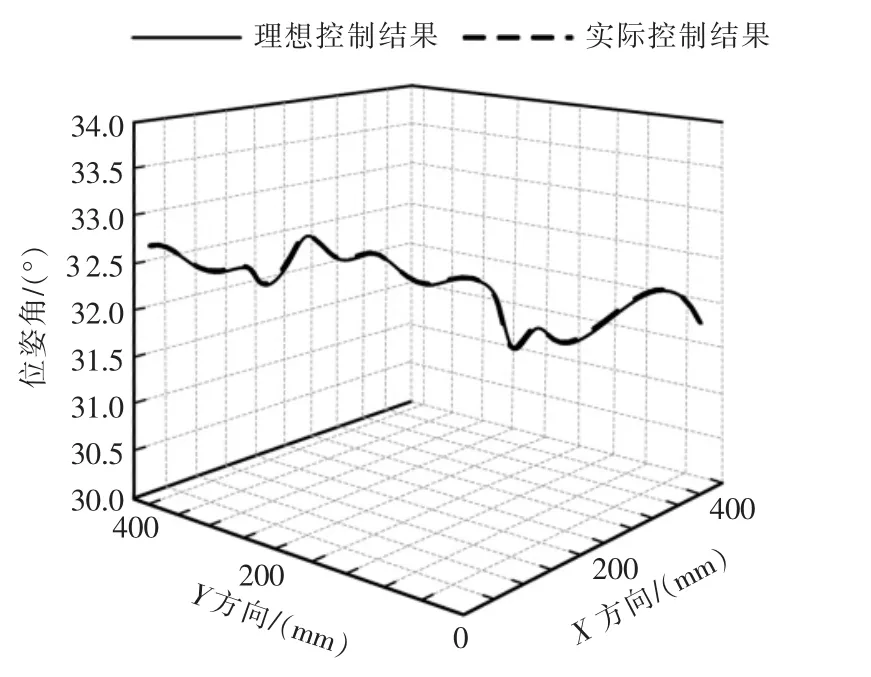
圖5 機器人位姿角控制結果Fig.5 Robot pose and angle control results
根據圖5 測試結果可知,本文方法應用后,能夠有效控制機器人的位姿角,控制后的位姿結果與期望位姿結果一致,未出現機器人位姿角偏差。因此,說明本文系統能夠有效實現機器人位姿控制。
為驗證本文系統的應用效果,獲取本文系統應用后,機器人在書籍尋找過程中,突發行人闖入后,機器人的自主避障效果,結果如圖6 所示。

圖6 機器人的避障效果測試Fig.6 Barrier avoidance effect test of robot
根據圖6 測試結果可知,本文系統應用后,機器人在目標書籍定位過程中,面臨行人突然闖入后,機器人能夠自主躲避行人,不會和行人發生碰撞,并且躲避行人后能夠自主重新規劃行駛路徑,完成目標書籍尋找。
為進一步驗證本文系統的實用性,以機器人的避障精準度為實驗指標,采用文獻[3]方法與文獻[4]方法進行對比測試,結果如圖7 所示。

圖7 機器人避障精準度對比結果Fig.7 Comparison results of robot obstacle avoidance accuracy
根據圖7 可以看出,應用本文系統后,機器人避障精準度最高達到98%,而文獻[3]方法的機器人避障精準度最高為87%,文獻[4]方法的機器人避障精準度最高為83%,均低于90%。相比之下,本文系統的避障精準度高,由此說明本文方法具有實用性。
3 結語
為提升機器人對于書籍的定位精度,本文設計基于人工智能的圖書館書籍定位機器人自動化控制系統。對該系統進行測試后得出:本文系統具有較好的應用效果,能夠精準完成不同大小書籍的定位,并且可完成館內作業環境識別,精準實現機器人位姿控制,并且可呈現不同控制模式下的人機交互結果。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小太陽畫報(2018年1期)2018-05-14 17:19:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
少年博覽·小學低年級(2016年10期)2016-11-24 06:48:23
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
漫畫月刊·炫版(2015年4期)2015-05-27 07:52:10
小雪花·成長指南(2015年4期)2015-05-19 14:47:56