G-Nut/Anubis在海洋站GNSS業(yè)務(wù)化觀測數(shù)據(jù)質(zhì)量檢核中的應(yīng)用研究
2023-11-28 10:08:16金波文王慧鄧麗靜徐浩吳新輝
海洋信息技術(shù)與應(yīng)用 2023年4期
金波文,王慧,鄧麗靜,徐浩,吳新輝
(國家海洋信息中心,天津 300171)
為連續(xù)監(jiān)測沿海海洋站驗潮基準面的沉降變化情況,2009 年以來,沿海海洋站增加了全球衛(wèi)星導(dǎo)航系統(tǒng)(Global Navigation Satellite System,GNSS)連續(xù)運行觀測業(yè)務(wù),可接收美國全球定位系統(tǒng)(Global Positioning System,GPS)和俄羅斯的格洛納斯衛(wèi)星導(dǎo)航系統(tǒng)(Global Navigation Satellite System,GLONASS)數(shù)據(jù)。隨著我國北斗衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou Navigation Satellite System,BDS)全面建成并投入使用[1]以及歐盟的伽利略衛(wèi)星導(dǎo)航系統(tǒng)(Galileo Navigation Satellite System,GAL)的逐步完善,2021 年以來,海洋GNSS 連續(xù)運行參考站網(wǎng)逐步升級后可接收GPS、 BDS、GLONASS 和GAL 的衛(wèi)星數(shù)據(jù)。目前,海洋站GNSS業(yè)務(wù)化觀測運行中采用的數(shù)據(jù)質(zhì)量檢核軟件主要是美國衛(wèi)星導(dǎo)航系統(tǒng)與地殼形變觀測研究大學聯(lián)合體研制的TEQC[2](Translation,Editing and Quality Checking),金波文等[3-4]、張龍平等[5]利用該軟件對海洋站GNSS升級前的連續(xù)觀測數(shù)據(jù)進行了分析,并驗證了GPS 和GLONASS 數(shù)據(jù)在海洋站驗潮基準面沉降監(jiān)測中的可用性。但是TEQC 的各項功能僅針對GPS 和GLONASS 系統(tǒng)的RINEX2.x版本觀測數(shù)據(jù),無法分析BDS 及RINEX 高版本的衛(wèi)星觀測數(shù)據(jù)文件[6-8]。除此之外,國際上主要的GNSS 數(shù)據(jù)質(zhì)量檢核工具還有德國地學中心研發(fā)的gfzrnx[9-10]、德國法蘭克福聯(lián)邦測繪局研發(fā)的BNC[11]和捷克國家大地測量局研發(fā)的G-Nut/Anubis[12-13]等。相較于其他質(zhì)檢工具,G-Nut/Anubis 可同時支持RINEX2.x 和RINEX3.x 版本的GPS、GLONASS、GAL、BDS 及其他國家的區(qū)域衛(wèi)星導(dǎo)航系統(tǒng)數(shù)據(jù)的質(zhì)量檢核,且國內(nèi)已有多位學者對其檢核性能進行了驗證和分析[14-15]。
為促進海洋站GNSS升級后多衛(wèi)星系統(tǒng)業(yè)務(wù)化觀測數(shù)據(jù)質(zhì)量檢核工作,本文以北海區(qū)老虎灘、東海區(qū)朱家尖和南海區(qū)北海海洋站為例,從數(shù)據(jù)完整率、周跳比、多路徑影響等方面,開展了GNut/Anubis 在海洋站GNSS 業(yè)務(wù)化觀測數(shù)據(jù)檢核中的應(yīng)用研究,為后期高精度數(shù)據(jù)解算提供參考。同時,為滿足業(yè)務(wù)化運行對數(shù)據(jù)質(zhì)量檢核批處理、可視化監(jiān)控和信息化管理等的需求,本文基于GNut/Anubis 核心質(zhì)量檢核模塊,利用Matlab App Designer 設(shè)計并實現(xiàn)了參數(shù)配置、檢核批處理、結(jié)果入庫和質(zhì)量可視化于一體的工具箱,并基于該工具箱完成所有海洋站GNSS觀測數(shù)據(jù)的質(zhì)量檢核,為海洋站GNSS業(yè)務(wù)化觀測數(shù)據(jù)質(zhì)量檢核、監(jiān)控管理等提供支撐。
1 數(shù)據(jù)質(zhì)量檢核指標
1.1 數(shù)據(jù)完整率
數(shù)據(jù)完整率是衡量觀測數(shù)據(jù)質(zhì)量的重要指標,反映測量時段中觀測數(shù)據(jù)的可用性和完好性,既能體現(xiàn)觀測環(huán)境的影響程度,又能體現(xiàn)接收機性能的優(yōu)劣。數(shù)據(jù)完整率定義為一個時段內(nèi)有效數(shù)據(jù)歷元個數(shù)與總歷元個數(shù)的比值[16],一般用Rt來表示,其計算公式為:
式中:Exp是根據(jù)設(shè)置的衛(wèi)星截止高度角及獲取的衛(wèi)星星歷計算出的可接受的衛(wèi)星觀測歷元總個數(shù);Hav是根據(jù)接受環(huán)境影響,實際接收的有效歷元個數(shù)。《全球?qū)Ш叫l(wèi)星系統(tǒng)連續(xù)運行基準站網(wǎng)技術(shù)規(guī)范》(GB/T 28588-2012)[17]規(guī)定,對于國家基準站和區(qū)域基準站,數(shù)據(jù)完整率應(yīng)大于85%,對于專業(yè)應(yīng)用站網(wǎng)基準站,可按實際情況執(zhí)行。本文GNSS的質(zhì)量檢核以上述指標作為參考值,但總體而言,數(shù)據(jù)完整率越大代表數(shù)據(jù)可用性和完好性越好。
1.2 多路徑影響
多路徑影響是GNSS測量中干擾測量質(zhì)量的主要原因之一。在GNSS觀測中,由于接收機可以接收到周圍環(huán)境反射的衛(wèi)星信號,對直接接收的衛(wèi)星信號產(chǎn)生干擾,導(dǎo)致觀測結(jié)果與真值產(chǎn)生偏差,即多路徑影響[18]。多路徑影響通常反映了周圍環(huán)境和其他因素對信號傳播的影響,數(shù)值越小,說明抗多路徑能力越強。在多路徑影響的計算中,G-Nut/Anubis 利用載波相位觀測值和偽距的線性組合,對所有GNSS 的觀測值進行多路徑影響計算,具體公式如下[19]:
式中:MP為多路徑影響;P為雙頻偽距觀測值;L為雙頻載波相位觀測值;f為頻率;k、i和j為頻率索引。
根據(jù)國際GNSS服務(wù)組織對觀測站數(shù)據(jù)的質(zhì)量分析,GPS 衛(wèi)星2/3 的測站MP1平均值小于50 cm,而2/3的測站MP2平均值小于75 cm。《北斗地基增強系統(tǒng)基準站建設(shè)和驗收技術(shù)規(guī)范》(GB/T 39772.1-2021) 中 規(guī) 定 BDS B1、 GPS L1、GLONASS L1的平均多路徑影響需小于等于50 cm,BDS B2、GPS L2、GLONASS L2 的平均多路徑影響需小于等于65 cm,BDS B3、GPS L5 的平均多路徑影響需小于等于65 cm[20]。由于其他系統(tǒng)頻率的MP 值暫未有參考依據(jù),本文GNSS 的質(zhì)量檢查以上述指標作為參考,但總體而言,MP值越小代表抗多路徑影響能力越強[21]。
1.3 周跳比
周跳指GNSS接收機在跟蹤載波信號時發(fā)生的暫時失鎖現(xiàn)象,會導(dǎo)致整周計數(shù)發(fā)生跳變或者中斷。周跳是影響測量精度的一個重要指標,通常利用載波觀測值和偽距進行無幾何(Geometry-Free,GF)組合、墨爾本-維貝納(Melbourne-Wu?bbena)組合以探測周跳,將不同歷元間差分結(jié)果與閾值進行對比,超出閾值則認為發(fā)生了周跳。有學者以周跳比(Cycle Slip Ratio,CSR)來表示觀測值的周跳狀況[19,22],其值越小表明數(shù)據(jù)質(zhì)量越好。G-Nut/Anubis 質(zhì)檢統(tǒng)計結(jié)果中周跳/中斷總數(shù)包括歷元缺失造成的中斷、衛(wèi)星在特定時間失鎖造成的中斷、信號擾動和連續(xù)跟蹤過程中識別的相位周跳,以及其他造成不連續(xù)的跳變數(shù)等[12]。周跳比計算公式為:
式中:O為觀測值數(shù);Slps為周跳/中斷數(shù)。根據(jù)國際GNSS 服務(wù)(International GNSS Service,IGS)觀測數(shù)據(jù)質(zhì)量分析結(jié)果,超過2/3的測站CSR平均值小于10[19],本文GNSS的質(zhì)量分析以此作為指標參考值。
2 海洋站GNSS實例分析
2.1 數(shù)據(jù)質(zhì)量檢核
本文選用的海洋GNSS連續(xù)運行參考站分別位于遼寧省大連市(老虎灘站)、浙江省舟山市(朱家尖站)和廣西壯族自治區(qū)北海市(北海站),采用華測導(dǎo)航的P5 測地型接收機,天線為拓普康的CR-G3(圖1)。以2022 年每季度最后一天(3 月31 日、6 月30 日、9 月30 日、12 月31 日)觀測數(shù)據(jù)為例,利用最新版G-Nut/Anubis(Linux 版本v3.5)軟件對所選站點進行質(zhì)量檢核,衛(wèi)星截止高度角設(shè)為10°,廣播星歷采用brdm 混合廣播星歷,從數(shù)據(jù)完整率、多路徑平均值(各衛(wèi)星系統(tǒng)多路徑影響MP值的平均值)、周跳比和偽距單點定位精度等方面進行數(shù)據(jù)質(zhì)量評估,質(zhì)檢統(tǒng)計結(jié)果如表1所示。

圖1 朱家尖海洋站GNSS觀測設(shè)備
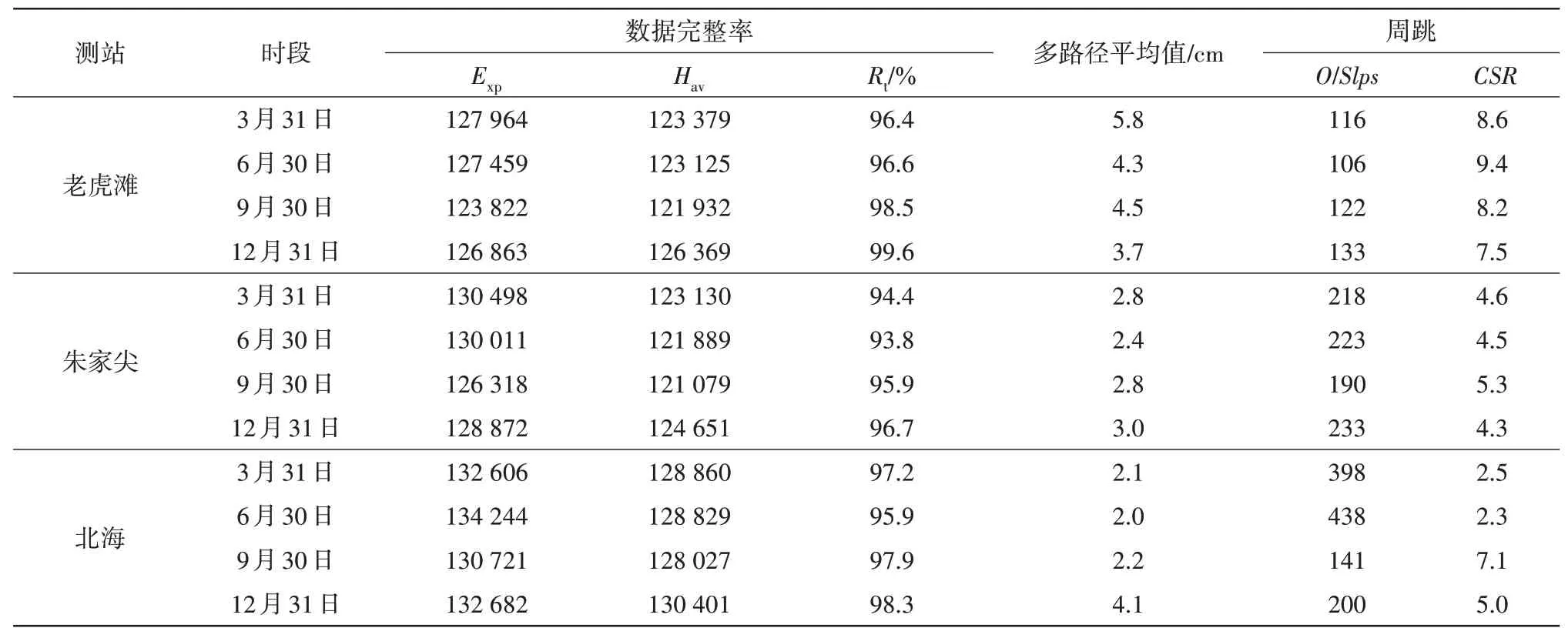
表1 各站GNSS質(zhì)量檢核統(tǒng)計
由表1 可知,2022 年各季度最后一天老虎灘、朱家尖和北海站的數(shù)據(jù)完整率最小值為93.8%,均滿足大于85%的要求;各站GPS、BDS、GAL、GLONASS 衛(wèi)星系統(tǒng)的多路徑平均值均滿足小于50 cm的要求;周跳比方面,老虎灘站總體略大于其他兩站,但均小于10。
2.2 質(zhì)量可視化分析
海洋站GNSS 升級后可接收四系統(tǒng)12 個頻點的偽距和載波相位觀測值,其中BDS 觀測值類型最多,包括4 個偽距觀測值(C2I、C5X、C6I、C7I)和4 個載波相位觀測值(L2I、L5X、L6I、L7I),GPS 觀測值包括3 個偽距觀測值(C1C、C2W、C5W) 和3 個載波相位觀測值(L1C、L2W、L5W),GAL 觀測值包括3 個偽距觀測值(C1X、C5X、C7X) 和3 個載波相位觀測值(L1X、L5X、L7X),GLONASS 觀測值包括2 個偽距觀測值(C1C、C2C)和2 個載波相位觀測值(L1C、L2C)。為了更好地反映各系統(tǒng)各頻段觀測數(shù)據(jù)的質(zhì)量情況,以朱家尖GNSS站為例,對數(shù)據(jù)質(zhì)量進行可視化,分別繪制衛(wèi)星天空軌跡和衛(wèi)星統(tǒng)計圖(圖2)、各系統(tǒng)觀測數(shù)據(jù)使用及不同頻段完整率統(tǒng)計圖(圖3)、周跳探測及多路徑統(tǒng)計圖(圖4)和單點定位誤差統(tǒng)計圖(圖5)。

圖2 衛(wèi)星天空軌跡和各頻段衛(wèi)星數(shù)量統(tǒng)計圖
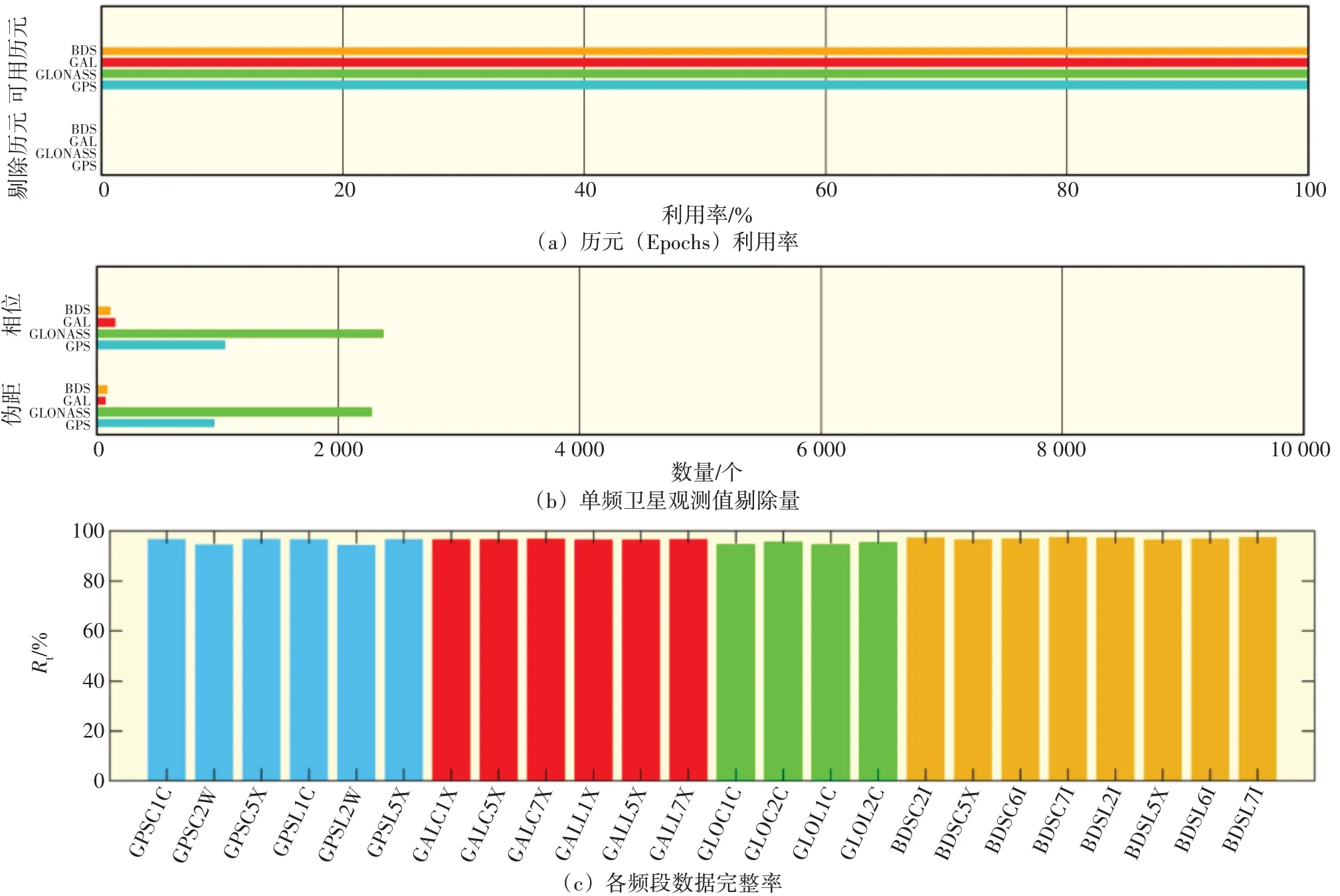
圖3 各系統(tǒng)歷元使用情況和各頻段觀測值完整率統(tǒng)計圖
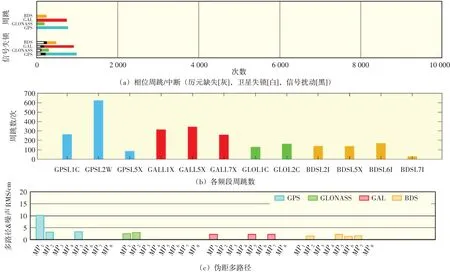
圖4 周跳探測和多路徑統(tǒng)計圖
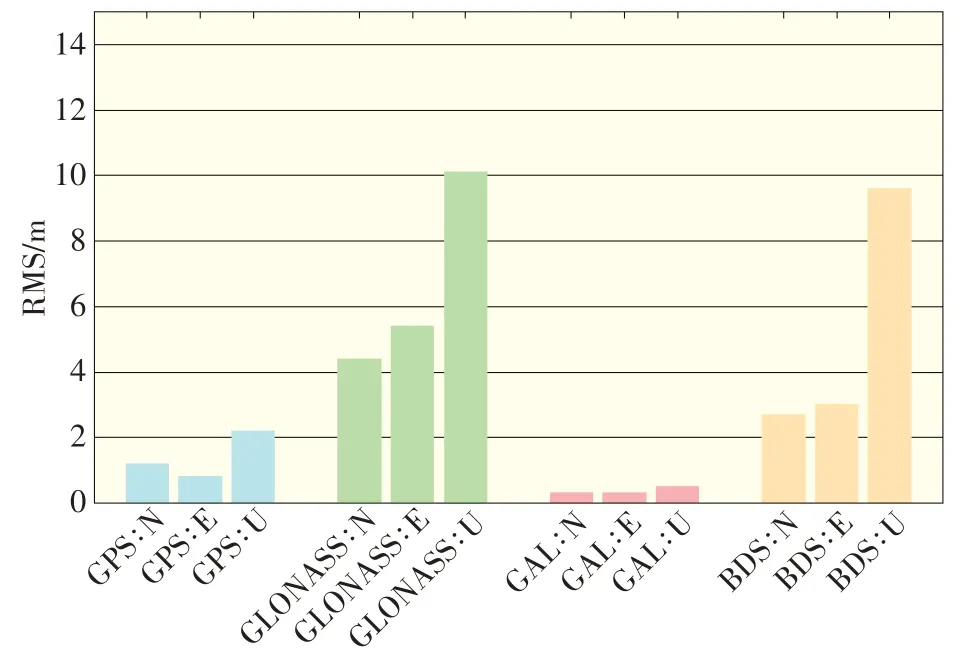
圖5 偽距單點定位誤差圖
從圖2 可以看出,BDS 衛(wèi)星天空軌跡最密集,其次是GPS,軌跡相對較少的是GLONASS 和GAL。BDS 的C2I、L2I(B1I 頻段)觀測值和C6I、L6I (B3I 頻段) 觀測值衛(wèi)星數(shù)為46 顆,C5X、L5X(B2a頻段)觀測值衛(wèi)星數(shù)為26顆,C7I、L7I(B2b 頻段)觀測值衛(wèi)星數(shù)為15 顆,這是因為B1I和B3I 為北斗二號和三號共用信號,衛(wèi)星較多,B2a和B2b為北斗三號信號,因衛(wèi)星發(fā)射較晚,所以衛(wèi)星數(shù)量相對較少;GPS的L1和L2頻段衛(wèi)星數(shù)均為31 顆,L5 頻段衛(wèi)星數(shù)為17 顆,這是因為L5頻段是2009 年以后GPS 現(xiàn)代化建設(shè)增加的信號,衛(wèi)星數(shù)相對較少;GAL 所有頻段和GLONASS 的L1 頻段衛(wèi)星數(shù)均為24 顆,GLONASS 的L2 頻段衛(wèi)星數(shù)為21 顆。這表明BDS 和GPS 星座已較為完善,軌道運行衛(wèi)星數(shù)量較為齊全。
從圖3 可以看出,本次質(zhì)檢時四個衛(wèi)星系統(tǒng)的歷元利用率均為100%,沒有無效歷元數(shù)據(jù)。從數(shù)據(jù)完整情況看,四個衛(wèi)星系統(tǒng)所有頻段的數(shù)據(jù)完整率均大于94%。其中,GLONASS的L1頻段數(shù)據(jù)完整率和GPS 的L2 頻段數(shù)據(jù)完整率相對較低,低于95%。由圖3(b)也可以看出GLONASS衛(wèi)星數(shù)據(jù)的剔除量最多,GPS 次之。其余衛(wèi)星系統(tǒng)所有頻段數(shù)據(jù)完整率均大于95%,完整性較好。
從圖4相位周跳/中斷數(shù)可以看出,載波相位跟蹤不連續(xù)產(chǎn)生的周跳數(shù)最多,衛(wèi)星失鎖和信號擾動產(chǎn)生的跳變數(shù)相對較少。GPS的L2W觀測值發(fā)生的周跳/中斷數(shù)最多,BDS 和GAL 各頻點觀測值發(fā)生的周跳/中斷數(shù)相對較少。多路徑影響和噪聲方面,各衛(wèi)星系統(tǒng)多路徑影響值均小于50 cm,BDS的多路徑影響值最小,具有較強的抗多路徑影響能力。GPS 的MP1大于MP2,除GPS 的MP1大于5 cm外,其余衛(wèi)星系統(tǒng)的所有MP值均小于5 cm。
圖5為各系統(tǒng)偽距單點定位誤差統(tǒng)計結(jié)果(本文使用混合廣播星歷,未使用精密星歷),可以看出N 方向和E 方向坐標誤差要小于U 方向。GAL 定位精度最高,NEU 方向坐標精度均小于等于0.5 m;GPS 坐標精度次之,N 方向和E 方向坐標精度在1 m 左右,U 方向坐標精度在2 m 左右;GLONASS 和BDS 的坐標精度較GPS 和GAL 要低。從偽距單點定位精度來看,GPS 和GAL 的精度相對更高。圖6 為間隔15 min 的偽距定位結(jié)果分布,各分量坐標分別減去了其平均值,可以看出BDS和GLONASS 的坐標離散度較大,GPS和GAL 坐標分布較為集中,表明GPS 和GAL 偽距單點定位坐標穩(wěn)定性要高于BDS和GLONASS。
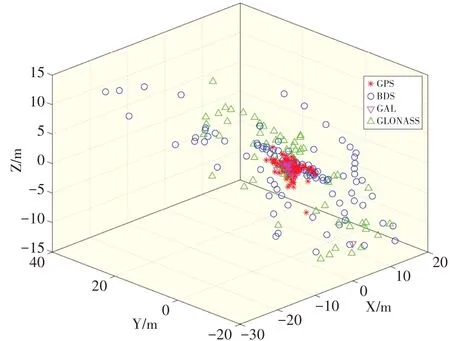
圖6 偽距單點定位坐標分布
3 質(zhì)檢軟件開發(fā)與應(yīng)用
G-Nut 是基于C++語言開發(fā)的用于GNSS 數(shù)據(jù)分析和產(chǎn)品監(jiān)測的軟件核心庫,Anubis 是利用GNut 核心庫實現(xiàn)的,兼容Linux、Windows、Mac 系統(tǒng)。Anubis 軟件采用參數(shù)配置形式通過用戶自定義檢核參數(shù)進行數(shù)據(jù)質(zhì)量檢核,然后生成包括GNSS全星座數(shù)據(jù)統(tǒng)計、定位精度、多路徑、信噪比和周跳探測等在內(nèi)的不同詳細程度的質(zhì)量檢核結(jié)果文件。Anubis 軟件本身不具備可視化功能,其官網(wǎng)提供了對應(yīng)的plot_Anubis 模塊通過命令行形式對部分結(jié)果進行可視化[15,23]。雖然其命令行形式運行簡單高效,但可視化模塊功能固定、形式單一,難以滿足海洋GNSS連續(xù)運行參考站的海量數(shù)據(jù)批量處理和管理需要,因此需要開發(fā)相關(guān)軟件工具用于海洋站GNSS數(shù)據(jù)質(zhì)量檢核及管理。
3.1 Matlab App Designer
Matlab App Designer 是Matlab 的一個交互式應(yīng)用程序設(shè)計工具,它具有簡單易用的界面設(shè)計工具和豐富的組件,通過拖放可視化組件即可實現(xiàn)圖形界面的設(shè)計布局,讓用戶輕松地創(chuàng)建各類應(yīng)用程序,并通過點對點交互的方式為組件添加回調(diào)函數(shù)以實現(xiàn)各種功能,包括數(shù)據(jù)可視化、數(shù)據(jù)分析等[24]。此外,Matlab App Designer 還支持自定義函數(shù),可以讓用戶根據(jù)需求進行靈活編程,同時可編譯成獨立的桌面或Web端App。
3.2 質(zhì)檢軟件設(shè)計與實現(xiàn)
基于G-Nut/Anubis 核心質(zhì)量檢核模塊,結(jié)合海洋站GNSS業(yè)務(wù)化運行對數(shù)據(jù)質(zhì)量檢核統(tǒng)計及可視化監(jiān)控的需求,采用Matlab App Designer 設(shè)計實現(xiàn)了集參數(shù)配置、質(zhì)量檢核批處理、結(jié)果入庫及可視化于一體的海洋站GNSS數(shù)據(jù)質(zhì)量檢核工具箱OGQC(Ocean station GNSS data Quality Checking)。軟件工具箱設(shè)計功能如圖7 所示,主要包含參數(shù)配置、質(zhì)檢批處理、質(zhì)量指標提取、信息入庫和可視化等功能模塊。
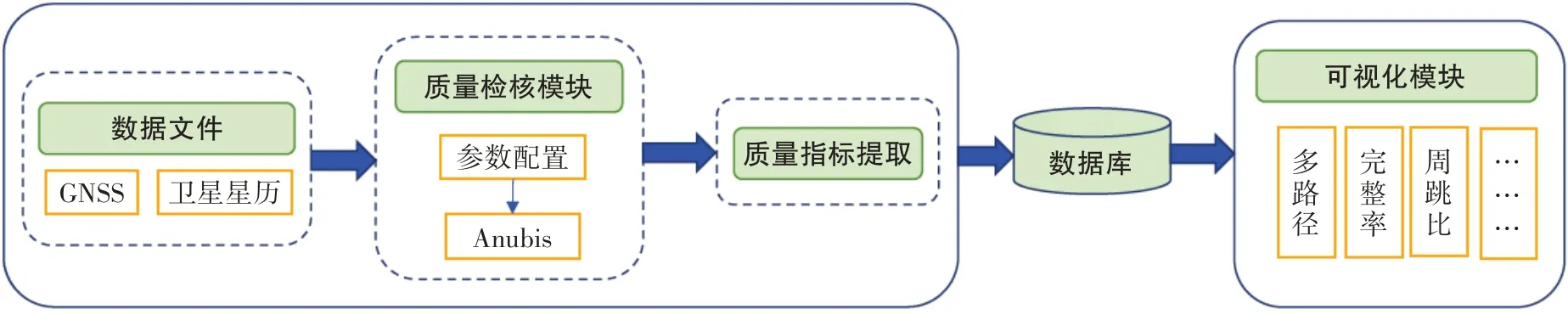
圖7 OGQC工具箱功能架構(gòu)圖
工具箱前端主要通過質(zhì)檢模塊進行參數(shù)配置,然后生成Anubis 執(zhí)行配置文件,再根據(jù)用戶設(shè)定的站點和時段調(diào)用Anubis 核心模塊進行數(shù)據(jù)質(zhì)量檢核批處理(Windows 平臺下直接調(diào)用Anubis 執(zhí)行文件進行質(zhì)檢,Linux 平臺下通過生成批處理腳本文件進行質(zhì)檢),生成質(zhì)量檢核結(jié)果文件。完成后,通過質(zhì)量指標提取模塊將關(guān)鍵指標值提取出來并存入數(shù)據(jù)庫,進行信息化管理。在可視化模塊,根據(jù)用戶選擇的站點和時段,讀取數(shù)據(jù)庫中對應(yīng)的質(zhì)量指標,然后調(diào)用Matlab 中的繪圖函數(shù)進行繪圖,并在主界面進行質(zhì)量指標時間序列可視化展示(圖8),可視化指標包括觀測時長、周跳比、數(shù)據(jù)完整率、多路徑影響等,其中GPS、BDS、GAL、GLONASS 各頻段的多路徑MP值分別繪制,并通過切換面板顯示其變化情況。
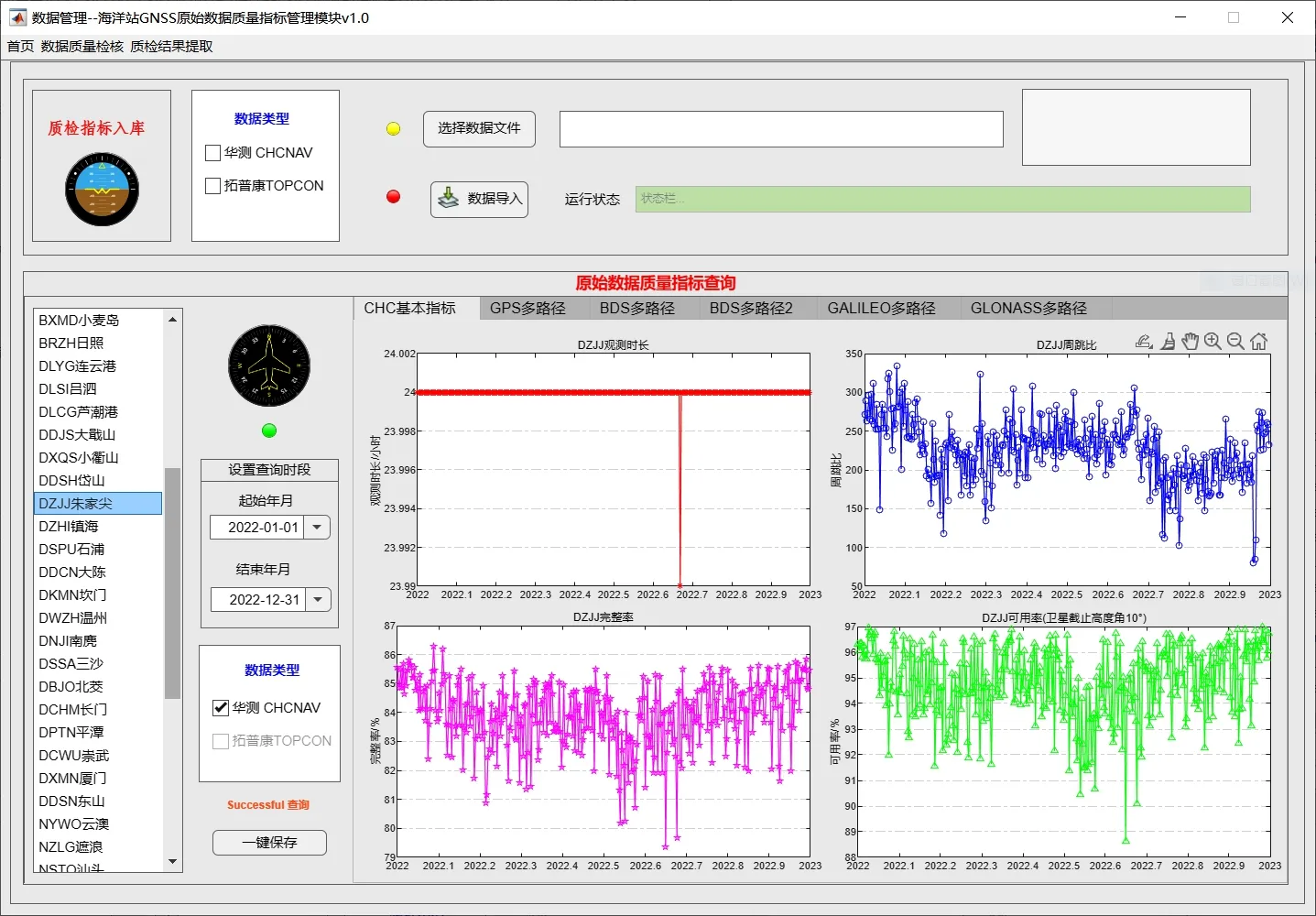
圖8 海洋站GNSS數(shù)據(jù)質(zhì)量檢核工具箱界面圖
3.3 功能測試與分析
為了驗證OGQC 工具箱的質(zhì)檢功能和可視化效果,利用工具箱對海洋GNSS連續(xù)運行參考站數(shù)據(jù)進行測試,選取朱家尖站2022 年全年觀測數(shù)據(jù),利用質(zhì)量檢核模型進行質(zhì)檢,并通過可視化模塊繪制其完整率和周跳比(圖9),各衛(wèi)星系統(tǒng)多路徑變化如圖10 所示。由圖9 可知,朱家尖站2022 年全年數(shù)據(jù)完整率均在85%以上,平均值為94.8%,無明顯跳變情況發(fā)生,2022 年完整率最小值出現(xiàn)在第238 天,為88.6%;周跳比除第351天和第352 天大于10 外,其余都小于10,全年平均值為4.6。由圖10 可知,朱家尖站2022 年各衛(wèi)星系統(tǒng)多路徑影響總體變化比較平穩(wěn),這表明測站周圍環(huán)境無明顯變化;GPS 的L1、L2、L5 頻段多路徑影響平均值分別為9.4 cm、2.5 cm和2.5 cm;BDS 的B1I、B2a、B2b和B3I頻段多路徑影響平均值分別為1.7 cm、2.1 cm、1.7 cm和1.3 cm;GAL的L1、L5、L7 頻段的多路徑平均值分別為1.9 cm、1.8 cm和1.9 cm;GLONASS的L1和L2頻段多路徑平均值分別為2.8 cm 和3.2 cm。總體而言,各系統(tǒng)多路徑影響值均滿足相關(guān)要求。利用OGQC 工具箱的批處理檢核功能可以省去重復(fù)的參數(shù)配置和數(shù)據(jù)分析過程,同時通過豐富的可視化模塊可以反映海洋站GNSS連續(xù)運行觀測數(shù)據(jù)的關(guān)鍵質(zhì)量指標,幫助數(shù)據(jù)處理人員更好地掌握各站各時段的數(shù)據(jù)質(zhì)量狀況,為后期高精度數(shù)據(jù)處理提供處理策略配置參考。
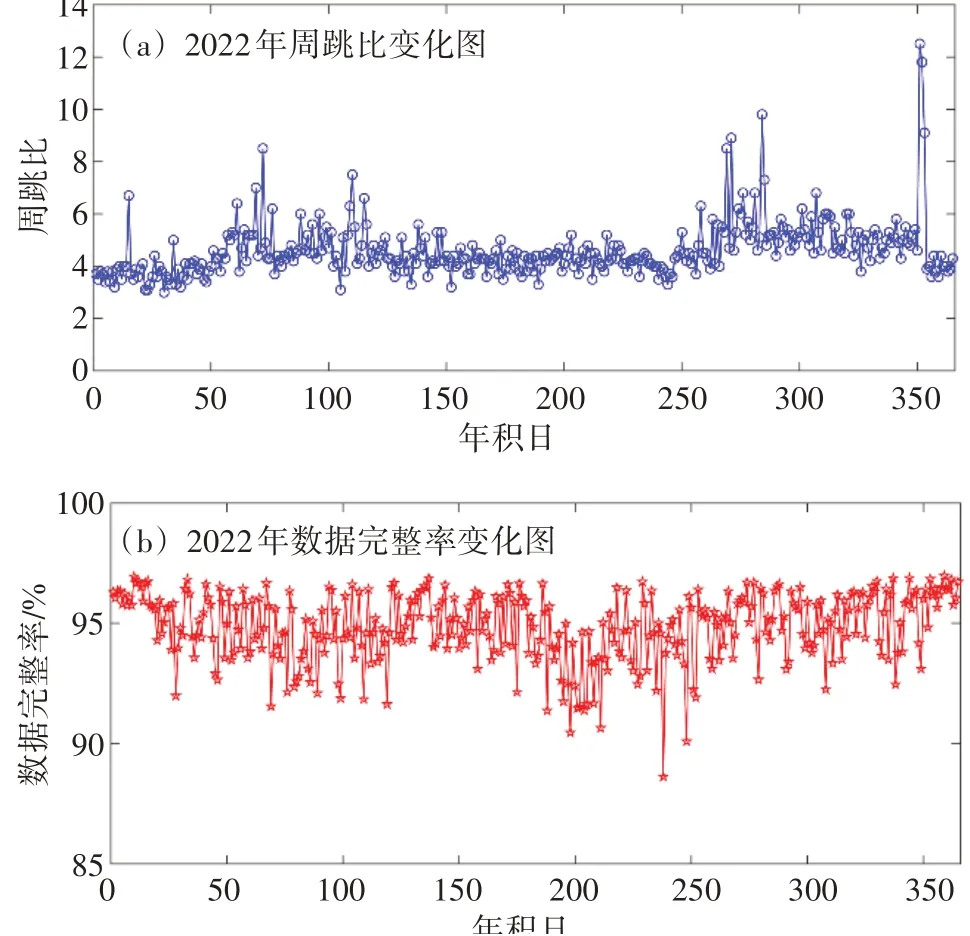
圖9 朱家尖站2022年GNSS數(shù)據(jù)完整率和周跳比變化圖
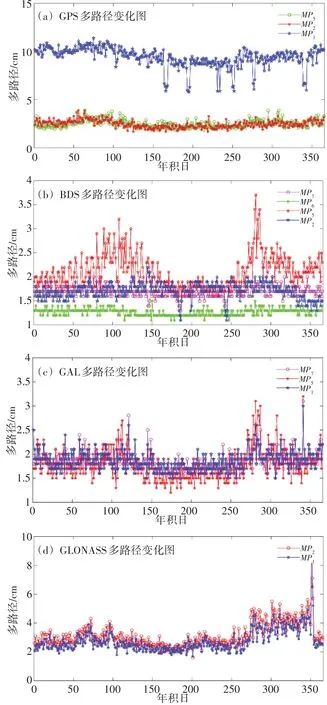
圖10 朱家尖站2022年GNSS數(shù)據(jù)多路徑變化圖
4 結(jié)語
本文針對海洋站升級后的四種系統(tǒng),選取了老虎灘、朱家尖和北海海洋站GNSS連續(xù)運行參考站2022 年各季度最后一天的數(shù)據(jù),利用G-Nut/Anubis 軟件從觀測衛(wèi)星數(shù)、數(shù)據(jù)完整率、周跳和多路徑影響等方面對GPS、 BDS、 GAL 和GLONASS 四系統(tǒng)的數(shù)據(jù)質(zhì)量進行了檢核,并以朱家尖站為例詳細分析了各頻段數(shù)據(jù)質(zhì)量情況。同時,基于Matlab App Desinger 開發(fā)了海洋站GNSS數(shù)據(jù)質(zhì)量檢核工具箱OGQC,并依據(jù)該工具箱對海洋站GNSS 數(shù)據(jù)進行了質(zhì)量檢核,以朱家尖站2022 年全年數(shù)據(jù)為例分析了其數(shù)據(jù)質(zhì)量變化情況,得出以下結(jié)論。
(1)所選測站中數(shù)據(jù)完整率均大于95%,各站GPS、BDS、GAL、GLONASS 衛(wèi)星系統(tǒng)的多路徑平均值均小于50 cm;各站周跳比均小于10,各項指標均滿足相關(guān)規(guī)范要求。
(2)從朱家尖站各系統(tǒng)各頻段數(shù)據(jù)質(zhì)檢結(jié)果可以看出,四個衛(wèi)星系統(tǒng)所有頻段的數(shù)據(jù)中,除GLONASS 的L1 頻段和GPS 的L2 頻段數(shù)據(jù)完整率相對較小(小于95%)外,其余衛(wèi)星系統(tǒng)所有頻段數(shù)據(jù)完整率均大于95%,完整性較好;從探測出的周跳類型發(fā)現(xiàn)載波相位產(chǎn)生的周跳數(shù)最多,衛(wèi)星失鎖和信號擾動產(chǎn)生的周跳相對較少,GPS的L2W 觀測值發(fā)生的周跳最多,BDS 和GAL 各頻點觀測值發(fā)生的周跳相對較少;多路徑影響和噪聲方面,各衛(wèi)星系統(tǒng)各頻段的多路徑影響MP值均小于50 cm;從偽距單點定位精度來看,N 方向和E 方向坐標誤差要小于U 方向,GPS 和GAL 的精度相對BDS和GLONASS更高。
(3) 本文基于Matlab App Designer 開發(fā)的OGQC 工具箱具有很好的批處理和可視化功能,通過朱家尖站2022 年全年的數(shù)據(jù)檢核結(jié)果的平穩(wěn)性和可靠性得出,OGQC 工具箱可以滿足業(yè)務(wù)化運行對數(shù)據(jù)質(zhì)量檢核指標批處理、可視化監(jiān)控和信息化管理的需要。在數(shù)據(jù)使用前,用戶可根據(jù)OGQC 軟件數(shù)據(jù)質(zhì)量檢核結(jié)果,對相應(yīng)星座、頻段、衛(wèi)星進行相關(guān)編輯、剔除等預(yù)處理操作,以提供高數(shù)據(jù)質(zhì)量用于后續(xù)高精度數(shù)據(jù)處理工作。
致謝:捷克國家大地測量局為本文提供了GNut/Anubis軟件,特此致謝。
猜你喜歡
北京測繪(2022年6期)2022-08-01 09:19:06
師道·教研(2022年1期)2022-03-12 05:46:47
中學生數(shù)理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
云南化工(2021年8期)2021-12-21 06:37:54
北京測繪(2021年7期)2021-07-28 07:01:18
中學生數(shù)理化·中考版(2020年10期)2020-11-27 01:59:48
海洋信息技術(shù)與應(yīng)用(2020年1期)2020-06-11 12:43:56
中國生殖健康(2019年2期)2019-08-23 08:12:08
傳媒評論(2019年4期)2019-07-13 05:49:14
產(chǎn)品可靠性報告(2017年7期)2017-09-05 09:49:12
