基于多模型融合的水輪機振擺合理性分析及預測
2023-11-29 01:56:08王曉蘭胡思宇管毓瑤劉洋成魏棕凱
水電站機電技術 2023年11期
王曉蘭,胡思宇,管毓瑤,劉洋成,魏棕凱
(大唐水電科學技術研究院有限公司,廣西 南寧 530007)
0 引言
水輪發電機組的安全穩定運行,對于水電站至關重要。在機械、水力、電磁因素耦合及機械部件老化等多種原因的復合影響下,水電機組產生的故障大多以振擺形式表現出來,因此振擺信號可以直觀地對機組運行狀態進行表征[1-5]。
目前,水輪發電機組的在線監測系統對關鍵指標進行越限告警的設定。但是閾值的設定往往比較高,也僅僅考慮單一指標的越限,機組預警的精確度不高,誤報和漏報的情況時有發生。在穩定運行區域,水輪發電機組的各個監測指標仍會受到水頭和勵磁電流等工況的影響,直接采集計算的監測指標變化率無法準確反映設備狀態的真實情況[6,7]。
目前,對于水輪機振擺分析存在以下問題:(1)海量的在線監測系統沒有統一的管理和維護辦法,前端采集到的數據沒有進行深入分析和缺乏專業技術人員的技術支持。(2)目前所采用的水輪機狀態監測和預警是通過設定固定閾值、計算變化率的方式,這樣的方式存在誤報、預警不及時的問題。(3)水電機組振擺監測信號受到運行環境、工況變化等多種因素綜合影響。其信號是復雜非線性的,僅僅考慮單一因素無法準備預測振擺信號。
本文研究一種基于多模型融合的水輪機振擺分析預測的方法,通過這種方法,能自動進行水輪機振擺幅度實時預測,并對振擺的振幅進行合理性判斷,有效的識別出超出正常范圍的情況,進一步的進行告警。
1 方案設計
本文提供的振擺分析預測方法,通過最小二乘將SVR、LightGBM和XGBoost進行融合,采用融合后的模型,對水輪機振擺數據進行分析預測,對異常的振擺值進行實時報警,從而達到故障診斷輔助決策的目的。具體如圖1所示。
具體步驟主要分為以下6部分:
(1)獲取歷史的機組振擺相關數據,并將數據表整合。
(2)將預處理完成的數據進一步處理為訓練集合。
(3)提取出訓練集合中的與振擺相關的數據,分別輸入SVR機器學習模型、LightGBM模型和XGBoost模型進行訓練。
(4)對三個模型的結果進行最小二乘擬合,得到三個模型的權值分配,形成融合模型,使預測數據貼近真實狀況,得到能夠精準預測振擺結果的模型。
(5)將在線監測的振擺相關數據輸入訓練好的融合模型,得到預測出的振擺并作為該工況下振擺的標準值。
(6)將采集的振擺數據與標準數據做對比,標記異常數據及異常等級。其中異常等級的劃分遵循以下原則:當振動值與擺度值小于40 μm時,若幅度大于預測值10 μm以上,判斷為二級幅度異常,若幅度大于預測值20 μm以上,判斷為一級幅度異常。當振動值與擺度值大于40 μm時,當幅度大于預測值的10%~25%,判斷為二級幅度異常;當幅度大于預測值的25%時,判斷為一級幅度異常。
2 相關原理
2.1 SVR
支持向量回歸(SVR)是一種基于支持向量機(SVM)的用于回歸的機器學習方法[8]。本文基于SVR,結合振擺及相關測點數據,通過在樣本空間中找到一條曲線并使所有數據點都盡量離該曲線足夠近,以實現對振擺數據擬合回歸功能[9]。其模型如圖2所示。
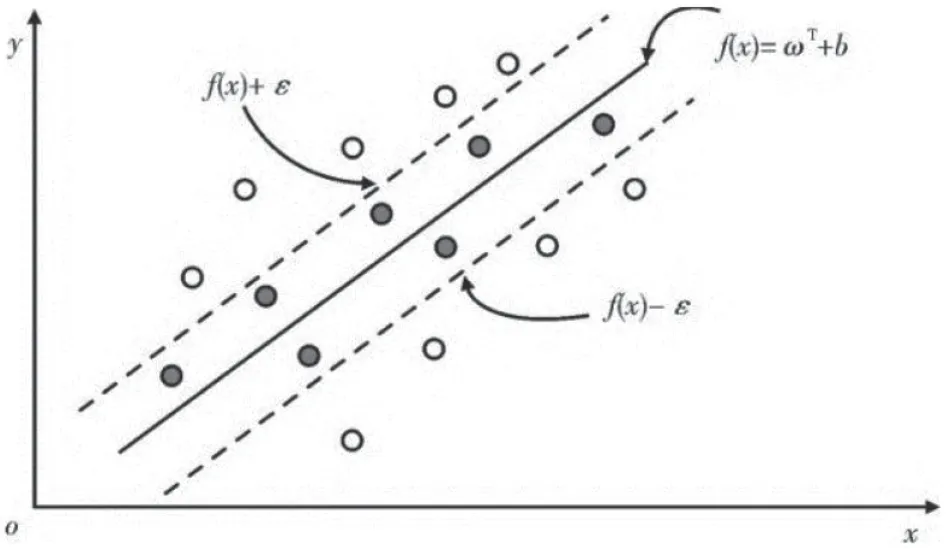
圖2 支持向量回歸模型
當存在n個輸入變量時,假設一個非線性估計模型:
其中,b代表偏差,w為權重向量,φ(?)為高維特征空間[10],xi為輸入向量。
SVR的最終目的即通過最大化間隔帶的寬度與最小化總損失來優化模型,求解得到f(x)中的w和b,則在求解過程中,需滿足一定的約束條件,即:
實際應用中,ε設置太小無法保證所有樣本點都在間隔帶中,ε太大回歸超平面會被一些異常點帶偏,為此SVR允許每個樣本(xi,yi)添加松弛變量ξi以避免優化問題求解不可行。此時SVR目標函數表示為[11]:
式中,C為懲罰系數,C過大或過小都不恰當,本文取值C=1以獲得較好的擬合效果。
2.2 LightGBM
LightGBM以決策樹為弱分類器,在傳統梯度提升樹(Gradient Boosting Decision Tree,GBDT)的基礎上,在生長策略上做了優化。優化方式包括特征直方圖、單邊梯度采樣、互斥特征捆綁和Leaf-wise。
假設訓練數據集為{(x1,y1),(x2,y2),…(xN,yN)},初始化分類器其中h0(x)為選定的首個基學習器,并設定T個基學習器的訓練目標,每個基學習器的計算方法如下。
(1)當前損失函數的負梯度myi的計算公式如下:
(2)擬合myi得到當前基學習器ht的參數:
(3)最小化損失函數得到當前基學習器的權重:
最終的分類器Ft(x)即為每個基學習器的加權和:
2.3 XGBoost
XGBoost同樣以決策樹為弱學習器,其集成模型如式(8)所示。
K是基學習器的數量;R代表基學習器的集合空間;fk表示集合R中的一個函數。
XGBoost的目標函數如下:
其中T為葉子結點數量;γ代表懲罰函數系數;ωj代表葉子結點的權重;λ代表正則化懲罰項系數。
2.4 最小二乘權值融合
為增加模型的魯棒性,將三種模型進行最小二乘權值融合,假設SVR預測結果為y1,LightGBM預測結果為y2,XGBoost預測結果為y3,那么融合后模型的預測值y'符合以下約定:
其中β為SVR權值占組合權值的比例,γ為LightGBM占組合權值的比例,λ為XGBoost占組合權值的比例,滿足:
對綜合權值進行最優求解:
3 實驗分析
實驗時選取水輪機水導擺度和頂蓋振動作為預測目標,經過專家經驗篩選49個相關特征后,采用皮爾森系數相關性分析后,選取25個高相關特征作為特征集合。將歷史數據拆分為訓練數據和測試數據,分別采用SVR、LightGBM和XGBoost進行訓練和測試,進一步的,為增加模型的魯棒性,采用最小二乘法將三種模型進行權值融合,融合后的權值分配如表1所示。
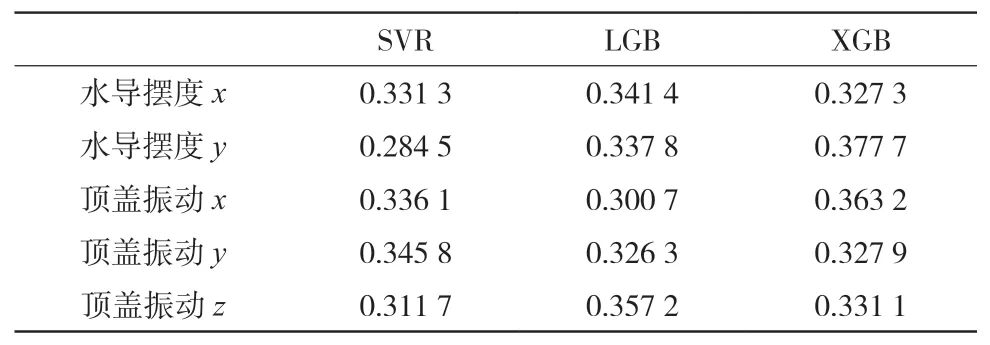
表1 融合模型權值分配結果
將所有模型的預測結果選取其中100個點進行繪圖,實驗結果如下:
從圖3可以看出,四種方法在測試集上的預測結果與真實值的趨勢保持一致,說明四種方法對于振擺的預測均有良好的效果。為進一步對模型效果進行評價,決定系數R2指標對四種模型進行評價,R2得分反映因變量的全部變異能通過回歸關系被自變量解釋的比例,表示為:
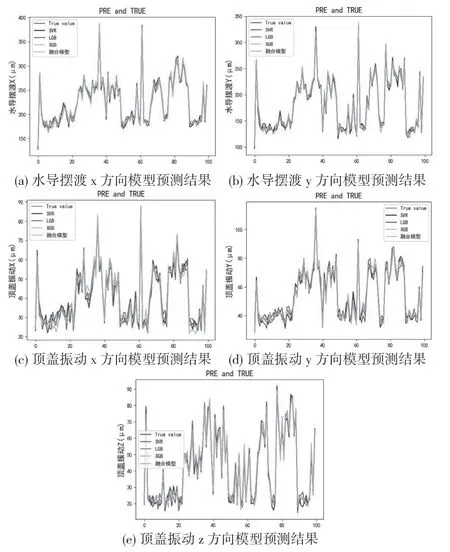
圖3 不同模型預測結果與真實值對比圖
其中,yi表示真實的觀測值,用表示真實觀測值的平均值,用表示預測值,MSE為均方誤差,Var為方差。
R2評分的取值范圍為[0,1],值越趨近于1表示模型擬合效果越好[12]。其結果如表2所示。
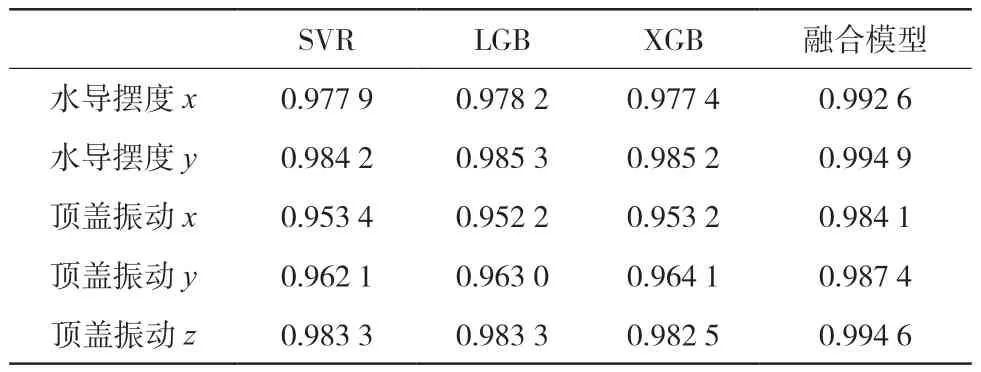
表2 不同模型評價結果
從表2可以看出,三種方法在水導擺度和頂蓋振動上的R2系數均大于0.95,說明三種模型均能有效預測振擺值,但通過對比,經過最小二乘融合后的模型,R2評分可以達到0.98以上,有顯著的效果提升。
將融合模型進行封裝后實時預測振擺值,并按照相關規則對異常數據和對應的告警等級進行記錄。
4 結論
(1)在振擺預測分析的問題上,采用專家經驗和特征工程技術共同選定特征集合可以綜合考慮影響振擺變化的因素,全面準確地提供有效的數據基礎。
(2)本文所采用的基學習器SVR、LightGBM和XGBoost均能夠有效地對振擺值進行預測,模型R2評分可以達到0.95以上。
(3)本文所研究的基于多模型融合的振擺分析模型在基學習器的基礎上,通過基學習器的不同表現進行權值分配,融合后的模型能夠更加有效和穩定的預測振擺,R2評分達到0.98以上,對比單一模型的效果,有了顯著的優化與提升。
(4)本文所研究的方法可以拓展適用于其他部位的預測,例如水輪機瓦溫預測等。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
