智能農機控制平臺技術研究
2023-11-30 00:45:24吳延勇
農業開發與裝備 2023年10期
吳延勇
(漣水縣生產力促進中心,江蘇漣水 223400)
0 引言
在智能化時代下,各種先進的智能技術不斷涌現。在農業領域,農機裝備通過應用智能化技術,推動了智能化農機控制平臺技術的應用與發展。智能化農機控制平臺技術實際包含了諸多內容,比如農機智能導航、智慧化管理等。通過加強對智能化農機控制平臺技術的應用分析,對推動我國農業實現現代化發展有著非常重要的意義。
1 智能農機控制平臺技術的應用價值
1.1 推動農業生產裝備產業轉型升級
在當下,我國農業生產裝備產業正處于關鍵轉型階段,而加強智能農機控制平臺的應用,可以顯著提升農業生產裝置智能化水平,并能夠發揮先進科學技術的優勢,帶動我國形成智能化農機設備全面發展的產業局面,推動我國農業裝備產業轉型升級與發展。
1.2 帶動我國綠色現代農業發展進步
在農業生產發展中,農機設備是不容忽視的一項核心內容。通過加強智能農機控制平臺技術的應用,可以進一步提升我國農機智慧化水平。同時,促進智能農機深入播種、施肥、采摘等多種農業生產環節,實現農業生產全過程機械化管理,不僅有利于提升農業生產效率,還能夠實現各種農業資源的高效化利用,減少了對環境的污染程度,以此來有效帶動我國高效綠色現代化農業發展與進步。
1.3 降低了農民勞動負擔
智能農機控制平臺技術最大的功能價值在于可以提升農機生產作業智能化、自動化水平,不斷減少農業生產人工干預,減輕了農民的勞作負擔,徹底改變了傳統的農業勞作模式,提升了農業生產效率。在智能農機平臺控制技術的幫助下,農業生產作業將會變得越來越精準化,對勞動力需求減少了70%~90%,降低了農民勞動負擔,未來更有可能實現無人農場。
1.4 提高農機使用安全性與使用壽命
在智能農機控制平臺技術中,包含了多種傳感器技術和監測技術。從而可以有效監控農機設備的使用狀態,及時發現農機運行異常,還能夠實現農機設備的故障自診斷與處理。針對一些嚴重故障問題,還能夠發出警報并自主停機,從而減少農機故障對農機設備的損害,有效保障農機使用安全,延長農機使用壽命。
2 智能農機控制平臺技術構建
2.1 農機智能導航技術
農機智能導航技術是實現農機智能化控制的重要前提。在這一過程中,農機智能導航主要包括以下兩大關鍵技術內容:
第一,農機智能導航姿態控制技術。從現實生產情況來看,農業生產環境比較復雜多變,很容易影響農機作業工況。尤其是復雜的生產環境會對農機姿態測量精度帶來一定的影響,限制了農機設備作用價值發揮。因此需要農機智能導航技術,加強對農機設備的控制,避免農機設備在生產中“偏航”。比如,可將北斗與慣性傳感器結合在一起,設計了外部加速度補償的卡爾曼濾波智能算法。在這種智能算法的幫助下,可將農機俯仰角2.00°誤差縮減至0.55°。不僅如此,該項智能算法的應用,還有效提升了航向角測量精度。從最初的5.0°提升至0.3°,促使相應的農機設備更好地適應復雜的生產環境。為了彌補單個農機傳感線精度較差的問題,可以采用多傳感器信息融合方式,有效集成不同傳感器優勢,通過采用陀螺儀、加速度計以及電子羅盤,設計出了一種農機航跡推算系統。在此基礎上,搭配GNSS系統絕對定位功能,從而顯著提升了農機導航定位測姿精度,能夠有效滿足農機在復雜農業生產環境下的導航定位需求。
第二,農機導航定位控制。在實際生產過程中,應用智能化農機設備,面臨不同的農作物、不同的生產內容以及不同的地塊,需要農機自主規劃針對性的導航作業路徑。為了有效解決這一問題,在智能導航技術應用方面,可以采用預瞄跟隨控制器、前視距離自適應調節器等,搭建專門的農機導航路徑跟蹤控制器。在這種智能導航路徑跟蹤控制器的幫助下,可以顯著提升農機導航系統控制精度水平。比如,在一些水田中,智能農機設備在生產過程中很容易出現嚴重的側滑、農機俯仰姿態很容易出現頻繁的橫滾,從而導致農機設備無法安裝正常的生產路徑開展作業,不利于農業自動化生產水平提升。而在農機導航復合路徑跟蹤控制器的幫助下,由于搭載了側滑估計補償裝置,因此可以有效抵御農機導航系統水田抗側滑的干擾,確保農機按照規劃好的路線前進作業。與此同時,在當下的一些農機導航系統中,避障功能依然有待進一步提升。在遇到障礙時,一些農機設備很難及時做出反應,迅速規避障礙,從而對農機自動導航作業安全帶來了嚴重影響。為解決這一問題,可以采用激光雷達的農田障礙物識別技術,同時應用了作業路徑追蹤智能算法,實現對農機作業路徑的實時跟蹤控制,在此基礎上,技術人員還開發了農機自動避障技術,從而可以準確識別農機作業路線中的各種障礙物,并及時作出反應,自動避開障礙物的同時,重新規劃新的路線,更好地保障農機設備使用安全。
2.2 智能農機智慧管理技術
在智能農機控制平臺技術中,也包括智能農機智慧化管理技術。該項管理技術內容包括遠程監控農機生產作業的位置、生產速度等,同時還會了解農機作業具體的工況以及允許狀態,實現對農機故障的遠程預警、指導維修與調度。在當下,很多智能化農機之中均配置了GNSS裝置。在該項裝置的幫助下,可以采集農機生產作業的各種信息,并通過無線網絡上傳至農機管理控制中心。不僅如此,還能夠支持農機在生產作業時產生的數據記錄查看、回放等功能。在一些智能化農機中,還裝載有質量監控傳感器,因此可以實現農機生產作業質量數據信息的傳輸,從而便于管理人員了解農機生產作業質量水平。在智能化農機中,還安裝有各種傳感器裝置,這些傳感器可以實時采集農機運行信息,比如農機拖拉機發動機運行參數、行駛速度等。又如農業收獲機的割臺高度、脫粒滾筒的轉速等信息。這些智能農機工況信息也會上傳至農機管理控制中心。在控制中心,可以將實際采集的生產工況信息與數據庫信息進行對比。一旦發現信息差異較大,可以及時發現農機生產運行工況的異常,然后向農機駕駛員或無人農場管理中心發出預警信息。在對比過程中,發現農業收獲智能化農機的脫粒滾筒轉速顯著下降,控制中心會及時發出預警,并建議降低收獲機前進速度避免發生堵塞造成嚴重的停機故障。在智能化農機生產過程中,如果發現較大的故障問題,則會遠程通知附近的維修站人員,及時趕往農場進行維護。如,在溫室大棚中,一些智能農機裝置系統也得到了廣泛應用。尤其是在大棚種植生產領域,通過在溫室內配置自動化照明系統、自動化溫濕度控制系統、自動化噴灌系統等(如圖1所示),從而實現溫室大棚自動化生產種植管理。如今隨著信息智能技術的不斷發展,機器視覺技術在溫室大棚智能農機系統之中也逐漸得到了應用。該項技術可以在智能計算機的幫助下,模擬人的視覺功能,同時在人工智能技術的支持下,模仿人腦功能,實現大棚中農作物圖像的提取計算分析,以此來判斷農作物的長勢情況,并結合判斷結果,控制溫濕度系統、灌溉系統等,自動調節室內溫度、濕度,實現溫室農作物生產自動化管理,顯著提升了大棚種植生產管理效率。
總而言之,在上述各種先進設備裝置的幫助下,可以實現對農機生產作業遠程智慧化管理,提升農業生產水平。
2.3 數字底盤技術
2022年11月,在重慶召開的2022中國農業機械與零部件行業峰會上,國家智能農機裝備產業創新戰略聯盟趙剡水理事長發布了《智能農機技術路線圖報告》(以下簡稱《報告》),趙剡水理事長以智慧農業為核心,明確指出當下的智能化農機對自動化、信息化、智能化要求在不斷提升。其中在報告中,針對智能農機設備,提出了數字底盤智能化控制技術。相較于傳統的智能設備底盤,數字底盤為純電動驅動,且具有智能駕駛控制功能。該底盤的智能化控制主要表現為在車載中央的計算機能夠以駕駛員意圖為依據,實現智能化控制決策。不僅響應速度非常快,而且有著非常高的控制精度,可實現數字底盤智能化控制。我國與發達國家的拖拉機底盤控制對比如表1所示,從表1可知,在變速器方面,我國拖拉機設備主要采用了嚙合套同步器進行換擋。而歐美發達國家采用了動力換擋、CVT。在轉向系統方面,我國拖拉機主要采用機械式、開心式全液壓轉向。而歐美發達國家采用了閉心式負載敏感全液壓轉向。在駕駛室方面,我國與歐美發達國家之間的差距更加明顯。比如,歐美發達國家主要采用了三級駕駛室,具體模式為正壓+氣溶膠過濾。還有一些智能農機駕駛室采用了四級駕駛室,正壓+氣味氣霧過濾,一般屬于果園農場專用。但在我國,拖拉機駕駛室依然以二級普通舒適性的駕駛室為主。關于數字底盤發展有如下預測:2025年后,數字底盤將采用中央控制方式,通信系統采用內部以太網+外部5G通信技術,數字底盤驅動能源為純電動或者純電-燃料電池。同時,數字底盤的行走系統有望實現離地間隙可調、機身自調平等智能化控制,線控轉向系統也會大規模應用,顯著提升拖拉機數字底盤的智能化控制功能。
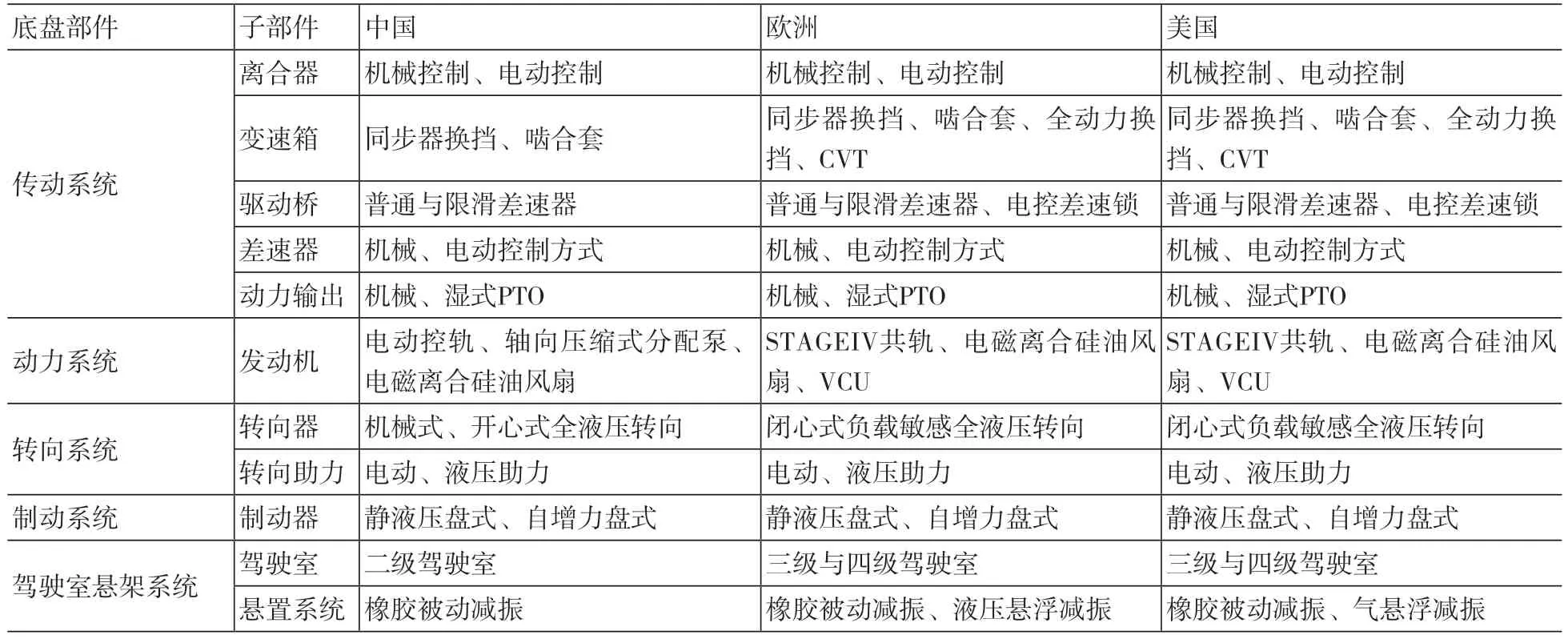
表1 拖拉機數字底盤國內外對比
3 智能農機控制平臺技術應用發展前景
智能農機控制平臺技術為推動現代農業建設發展提供了強大的技術支持,同時對未來智慧農業發展的方向也會帶來一定的影響,因此發展前景非常的廣闊。當下正處于“十四五”發展時期,同時也是實現農業農場現代化發展的關鍵時期,國家發布了一系列政策,為智能化農機控制平臺技術研發提供了巨大的發展空間。在大力推動農業現代化發展建設的過程中,通過促進智能化農機控制平臺技術應用推廣,能夠有效解決未來誰來種地的難題,同時成功將廣大農民從繁重的體力勞動中解放出來,改變以往“面朝黃土背朝天”的農業生產現狀,實現農業種植的精準化、標準化、自動化、規模化生產管理。從當前情況來看,我國智能化農機控制平臺技術發展速度在不斷提升,在農業機械導航等領域已經取得了顯著的成果。比如,如今我國農業已經成功研制出了無人駕駛旋耕機、無人駕駛播種機、無人駕駛插秧機等。在未來,隨著平臺數據處理分析、智能決策能力的進一步提升,智能化農機控制平臺技術將更加智能,并在推動現代化農業發展過程中發揮出更大作用價值。
4 結語
智能化農機控制平臺技術在推動現代化農業發展過程中發揮著非常重要的價值。因此必須提高對智能化農機控制平臺技術應用的重視程度,推動相關先進技術的研發,才能帶動我國農業生產智能化水平提升。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
印刷工業(2020年4期)2020-10-27 02:45:52
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國交通信息化(2017年4期)2017-06-06 07:21:52
故事大王(2016年7期)2016-09-22 17:30:08
能源(2015年8期)2015-05-26 09:15:56