
潛艇垂直面運動多約束模型預測控制
2023-12-04 06:37:28李光磊郭亦平李兵軍
艦船科學技術 2023年20期
李光磊,郭亦平,李 軍,李兵軍
(1.海軍裝備部駐九江地區軍事代表室,江西 九江 332007;2.天津航海儀器研究所九江分部,江西 九江 332007)
0 引言
隱蔽性是潛艇的重要特性之一,隨著水下探測技術的發展,提高潛艇聲隱身能力已成為各國潛艇技術發展的中心任務之一。螺旋槳噪聲、機械噪聲和水動力噪聲是潛艇在水下航行時的主要噪聲,各噪聲源具有非線性、時變性和不確定性,以及相互影響和耦合作用[1]。隨著對潛艇繞流場和水動力噪聲研究不斷深入,潛艇水下運動時繞流場變化和操縱翼面對尾流場作用,進而對螺旋槳噪聲和水動力噪聲產生影響的機理已不斷得到試驗驗證,使得潛艇低噪聲航行工況成為操縱控制的一種必備模式[2]。
Thomas F.Brooks 等[3]以NACA0012 型翼面為研究對象,開展了0°~25.2°攻角下0.5×106~4.6×106雷諾數情況下翼面自噪聲風動測試試驗,提出了一套完整的平穩流中翼面自噪聲半經驗預報方法。Javier García[4]和Diana Ovalle 等[5]設計了一種基于6 自由度非線性耦合水動力方程的梯度下降尋優非線性深度和航向操縱控制算法,應用于操縱翼面優化、液壓舵機功耗減少及降低操舵水動力噪聲、減少復雜場景下潛艇過量運動等試驗驗證。試驗結果揭示了潛艇運動時,操縱翼面渦流分離導致水動力噪聲的發生機理。
國內相關研究人員借鑒國外操縱控制對流場擾動和水動力噪聲的影響研究成果,從操縱控制對流場影響分析、低噪聲操縱策略等方面開展了相關研究。李士強[6]仿真分析了單獨舵、直航打舵以及斜航工況下潛艇伴流對舵水動力性能的影響。趙橋生等[7]開展了針對水下航行體機動航行時,流場擾動及水動力噪聲的技術研究。王京齊等[8]對低噪聲安靜操縱控制規律進行了探討,提出了盡量減少對螺旋槳上流尾流場擾動等低噪聲操縱控制的特殊要求。上述研究成果指明了“慢操舵、操小舵、緩變化”的低噪聲操舵控制原則。
顏俐等[9]為消除圍殼舵產生的噪聲,進而增加聲吶探測距離,提出了低噪聲航行工況下單尾舵模糊控制器,實現潛艇在垂直面深度和縱傾控制的操舵控制方案。黃利華等[10]以降低舵機噪聲、提高控制精度為目標,驗證了潛艇低噪聲航行工況下對轉舵速率和舵角幅值約束的有效性。林超等[11]在潛艇垂直面線性最優控制中,引入前置濾波器對指令信號進行柔化處理,提出了一種二自由度操縱控制策略,該操縱策略可降低操舵速度、減小操舵角和操舵次數。綜合分析可知,上述控制策略和算法設計均需離線設計,仍不能較好適應多種復雜場景下潛艇低噪聲操縱控制需求。
本文針對潛艇低噪聲操縱控制需求,基于多約束條件模型預測控制理論,提出了一種根據操縱任務特點,實時設置深度變化率、縱傾角、舵角和舵速等約束條件,在線設計控制律參數的潛艇垂直面運動控制算法。為有效解決多種復雜場景下潛艇低噪聲操縱控制問題提供一種思路方法。
1 潛艇垂直面運動的離散化差分狀態方程
由潛艇操縱性[12]理論可知,潛艇在水中空間運動,弱機動時可分解成2 個平面運動,即潛艇水平面運動和垂直面運動。潛艇垂直面運動的非線性方程非常復雜,但低速運動潛艇,其垂直面運動可簡化為如下線性狀態方程和輸出方程:
式中:w為垂速;q為縱傾速度;θ為縱傾角;η為下潛深度;δb為圍殼舵(或首舵)舵角;δs為為升降舵舵角;V為潛艇航速,aij(V)和bij(V)是與航速相關的參數(以后為敘述方便,省略(V))。xm=[w,q,θ,η]T,u=[δb,δs]T,y=[θ,η]T,具體可參照文獻[13]。
式(1)和式(2)簡記為:
上式離散化后,可得:
式中:Am≈I+Ac·Ts,Bm≈Bc·Ts,Cm=Cc,I為單位矩陣,Ts為采樣時間。xm(k)=[w(k),q(k),θ(k),η(k)]T,u(k)=[δb(k),δs(k)]T,y(k)=[θ(k),η(k)]T。
將式(4)兩端差分運算后,引入
則可得如下增量式狀態方程和狀態輸出方程:
上式簡記為:
式(7)可用于后續狀態觀測器的設計。
2 多約束條件下垂直面運動控制算法設計
2.1 深度控制器設計
潛艇一般用圍殼舵控制深度,用尾升降舵控制縱傾[14]。因此,在潛艇垂直面運動控制律設計中,多數采用分離設計思想,即圍殼舵—深度控制律和尾升降舵—縱傾控制律設計方法。本文根據上述原則進行垂直面運動控制律設計。
從式(7)中抽取相應狀態和參數,可獲得下述深度控制律設計所需狀態方程:
為了對深度變化率施加約束,則可設置輸出方程為:
式(8)和式(9)可簡記為:
考慮指令深度為r(ki),構造指令向量xr(ki)=[0,0,0,0,r(ki)]T。則可將式(10)中的狀態變量變換為:
式(10)中的輸出相應變換為深度偏差。后續控制律代價函數中將采用式(11)所示的狀態向量。
假設在k時刻的m個采樣間隔后解算的預測指令舵角增量為:
式中:Lb(m)T為擬合深度MPC 控制器的離散化Laguerre 函數向量,Θb為Laguerre 參數[15–16]。
假設在k時刻,式(12)的狀態為x(k),則在此時刻后的m個采樣間隔的預測狀態為:
為設計深度預測測控制律,設代價函數為:
式中:權矩陣Q為5×5維半正定矩陣,R為正定矩陣。
將式(13)所述預測狀態代入上述代價函數,則利用Laguerre 函數的正交特性,可得:
式中:
令上式對 Θb求導,可得無約束條件下,線性模型預測控制律為:
若在深度控制過程中,為降低操舵對繞流場影響,則代價函數求解需考慮以下約束:
1)舵角限制:umin≤δs(k)≤umax
舵角約束不等式為:
將m=1,2,...,nc對應的舵角約束整理成矩陣不等式,則可得:
簡記為:
2)舵速限制:?umin≤?u≤?umax
舵速約束不等式為:
將m=1,2,...,nc對應的舵速約束整理為矩陣不等式形式,則有:
簡記為:
將式(18)和上式聯立后簡記為:
3)深度變化率限制:?ηmin≤?η ≤?ηmax
在變深過程中,為防止深度變化率過大,可對深度變化率施加約束。變深過程中某些時間段內,可適當突破該約束,故該約束為軟約束。
由式(10)和預測狀態(13)可得:
由此可得:
則有:
聯立為矩陣不等式,簡記為:
聯立式(21)和式(23),有
至此,多約束條件下,深度MPC 控制器的求解問題被轉換為二次規劃問題:
該二次規劃問題采用活動集法求解,可利用Hildreth二次規劃方法求解[15–17]。故深度MPC 控制器可設計為:
2.2 縱傾控制器設計
從式(7)中抽取與縱傾相關的和參數,可獲得下述縱傾控制律設計所需狀態方程:
考慮到變深過程中縱傾角對潛艇流場,尾升降舵對螺旋槳尾部紊流場有較大影響,故在縱傾控制律設計中,需將縱傾和尾升降舵作為約束進行相應的理。
為導出縱傾約束條件,設置如下輸出方程:
與深度控制器設計方法類似,將縱傾、尾升降舵舵速(舵增量)、尾升降舵角作為約束條件,可設計尾升降舵——縱傾控制器如下:
3 垂直面運動狀態觀測器設計
由式(8)和式(22)可知,在深度控制器和縱傾控制器中,需要用到 ?w(k) 和 ?q(k)信息,而在潛艇操縱控制系統中,沒有垂速w和縱傾變化率q的量測裝置,故不能用二者量測信號直接求取 ?w(k) 和 ?q(k)。因此,需設計相應狀態觀測器來提取 ?w(k) 和 ?q(k)的觀測信號。
由式(7)和式(8)可知,?w(k)和 ?q(k)具有較強耦合,且圍殼舵和尾升降舵對二者均有影響。因此,需采用耦合設計思想設計相應的狀態觀測器。
與最優控制理論類似,在模型預測控制中,觀測器和控制器可分別設計。采用基于對偶原理觀測器設計[18]方法,構造式(6)和式(7)描述系統的對偶系統方程如下:
針對該對偶系統,運用類似前述控制器設計方法,構造多維Laguerre 函數,求解觀測器增益。設計如下全維狀態觀測器:
式中,Ko為對偶系統控制器增益的共軛轉置。
4 仿真結果與分析
為驗證本文提出控制算法的有效性,利用文獻[4]潛艇6 自由度方程作為潛艇運動數學模型進行有約束和無約束條件下的仿真驗證實驗。該潛艇的部分參數如表1 所示。

表1 潛艇部分參數Tab.1 Someparemeters of the submarine
控制器和觀測器的Laguerre 矩陣維數均設置為7,控制器的Laguerre 網絡極點均設置為α=0.55;觀測器的Laguerre 網絡極點設置為α=[0.55,0.55,0.55,0.55],控制器預測步設置為Np=80,預測控制步長為Nc=0.2Np。觀測器預測步長與預測控制步長一致,控制器采樣時間為1s。
離散時間MPC 控制器為在線實時設計,故約束條件均可由操縱人員依據戰術任務而實時設置。
1)6 kn 航速下潛60 m 操縱控制仿真實驗
仿真實驗中,設置初始深度為60 m,指令深度為120 m,圍殼舵舵角約束為-20?≤δb≤20?,尾升降舵舵角約束為-5?≤δs≤5?,兩舵舵角增量(即最大舵速)約束均設置為-2?≤?δ ≤2?。在變深過程中,設置縱傾約束為-2?≤θ ≤2?,深度增量約束設置為-0.5 m ≤?η ≤0.5 m(即深度變化率不超過0.5 m/s),仿真時間設置為600 s。操縱控制仿真實驗結果如圖1 所示。

圖1 6 kn 航速下潛60 m 操縱控制仿真結果Fig.1 Simulation result of maneuvering and control for diving 60 m at 6 kn speed
2)12 kn 航速上浮60 m 仿真實驗
仿真實驗中,設置初始深度為120 m,指令深度為60 m,圍殼舵舵角約束為-20?≤δb≤20?,尾升降舵舵角約束為-5?≤δs≤5?,兩舵舵角增量(即最大舵速)約束均設置為-2?≤?δ ≤2?,變深過程中,設置縱傾約束為-2?≤θ ≤2?。深度增量約束為-1 m ≤?η ≤1 m(即深度變化率不超過1.0 m/s),仿真時間設置為600 s。操縱控制仿真實驗結果如圖2 所示。
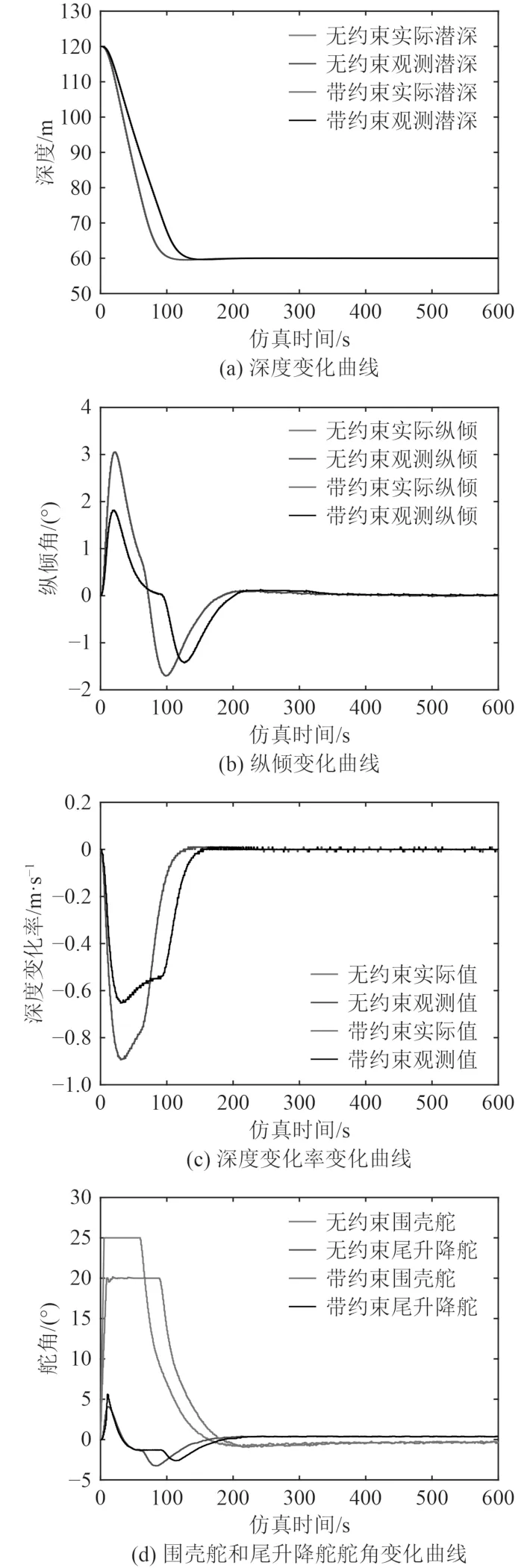
圖2 12 kn 航速上浮60 m 操縱控制仿真結果Fig.2 Simulation result of maneuvering and control for floating 60 m at 12 kn speed
由圖1(a)和圖2(a)可知,潛艇在6 kn 和12 kn航速下的變深控制過程中運動平穩、無超調、無振蕩。結合相應縱傾變化曲線和深度變化率曲線可知,在變深操縱控制過程中,潛艇縱傾和深度變化率均在約束范圍內。由此表明:潛艇變深過程中,縱傾和深度增量均沒有超越各自約束值,深度控制和縱傾控制算法能夠高效合理解算出圍殼舵角和尾升降舵角指令。對比圖1(a)和圖2(a)中無約束變深曲線和多約束條件變深曲線可知,在變深動態過程中,多約束條件下過渡過程時間較無約束條件有所增加。結合縱傾變化曲線可知,過渡過程時間的增加與縱傾動態變化密切相關。如圖1(b)中,無約束條件下,最大縱傾值為-3.2°,而多約束條件下最大縱傾值僅為-2.0°;由圖1(c)和圖2(c)可知,無約束條件下,深度變化率均大于多約束條件,表明深度變化率約束條件對深度控制律的求解有影響,縱傾約束條件對縱傾控制律的求解有影響。而由圖1(d)和圖2(d)可知,在變深過程中,圍殼舵角和尾升降舵舵角均在各自約束范圍內,表明所設計的多約束控制器合理有效。結合圖1(b) 和圖1(d)也可看到,在62 s~64 s 時間段內,在有約束條件下,縱傾在62 s 時刻達到了約束下限。此時,為了將縱傾角保持在約束范圍內,尾升降舵在隨后2 個采樣步長內,從3.6°正舵角變化到了-3.0°負舵角,最大舵速為4.5°,超出最大舵速約束值。如文獻[17]所述,其原因是采用的Hildreth 二次規劃算法屬于逐個元素搜索方法,當有效集個數大于決策變量中元素個數或有效約束線性相關,則迭代會在計數其最大值時終止,但算法不會出錯,只是解算結果會得到一個違背約束條件的近優解。由此也可表明,本文的Hildreth二次規劃算法合理。從圖1 和圖2還可看出,本文提出的在線設計狀態觀測器可實時、準確跟蹤實際信號,表明基于對偶原理和模型預測控制理論,實時設計的狀態觀測器具有良好的收斂性和穩定性。
5 結語
本文針對潛艇低噪聲操縱控制問題,提出了一種在深度變化率、縱傾、舵角和舵速等多種約束條件下,垂直面運動模型預測控制算法。探索出一種多約束條件下深度控制器、縱傾控制器和垂直面運動狀態觀測器的在線設計方法,實現了潛艇垂直面低噪穩定運動控制。仿真結果表明:1)基于Laguerre 函數的模型控制設計方法可在線設計相應深度控制器、縱傾控制器,控制效果良好,易于實現;2)基于對偶原理,結合Laguerre 函數的模型控制設計方法可在線設計垂直面運動狀態觀測器,所設計的狀態觀測器能夠實時精確地跟蹤深度與縱傾,并可對深度增量和縱傾增量進行實時精確提取,具有較好的工程實用價值。
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
