
基于信息交互與傳達技術的船舶航跡界面設計方法
2023-12-04 06:38:10朱丹
艦船科學技術 2023年20期
朱 丹
(西安交通大學城市學院,陜西 西安 710018)
0 引言
對船舶航跡界面實施合理設計,是能夠有效規范以及管理船舶航跡,提升船舶航行安全以及穩定性的重要前提[1-3]。鑒于此,為更好保障船舶安全穩定運行,設計一種合適的船舶航跡界面非常有必要。
近年來國內外學者進行了大量研究,吳瀟燦等[4]研究應用計算機輔助技術的船舶航跡界面設計方法,古毅杰等[5]研究應用視覺感知技術的船舶航跡界面設計方法。2 種設計方法均具有較強的實際應用性,但僅限于船舶航行環境復雜程度較低的狀況。
基于信息交互與傳達技術對船舶航跡界面實施合理設計,可使船舶駕駛人員在較為復雜的航行環境中,也能夠準確獲知船舶航行狀況,以便及時糾正航行錯誤。為此,本文提出基于信息交互與傳達技術的船舶航跡界面設計方法,提升船舶在航行方面的安全性與穩定性。
1 船舶航跡界面設計
1.1 船舶航跡界面架構
基于信息交互和傳達技術對船舶航跡界面實施合理設計,以較快速度把船舶航跡以及航行環境合理呈現于用戶面前,旨在使用戶獲得更為良好的視覺體驗感,更為完美地完成航行任務。設計的船舶航跡界面架構如圖1 所示。
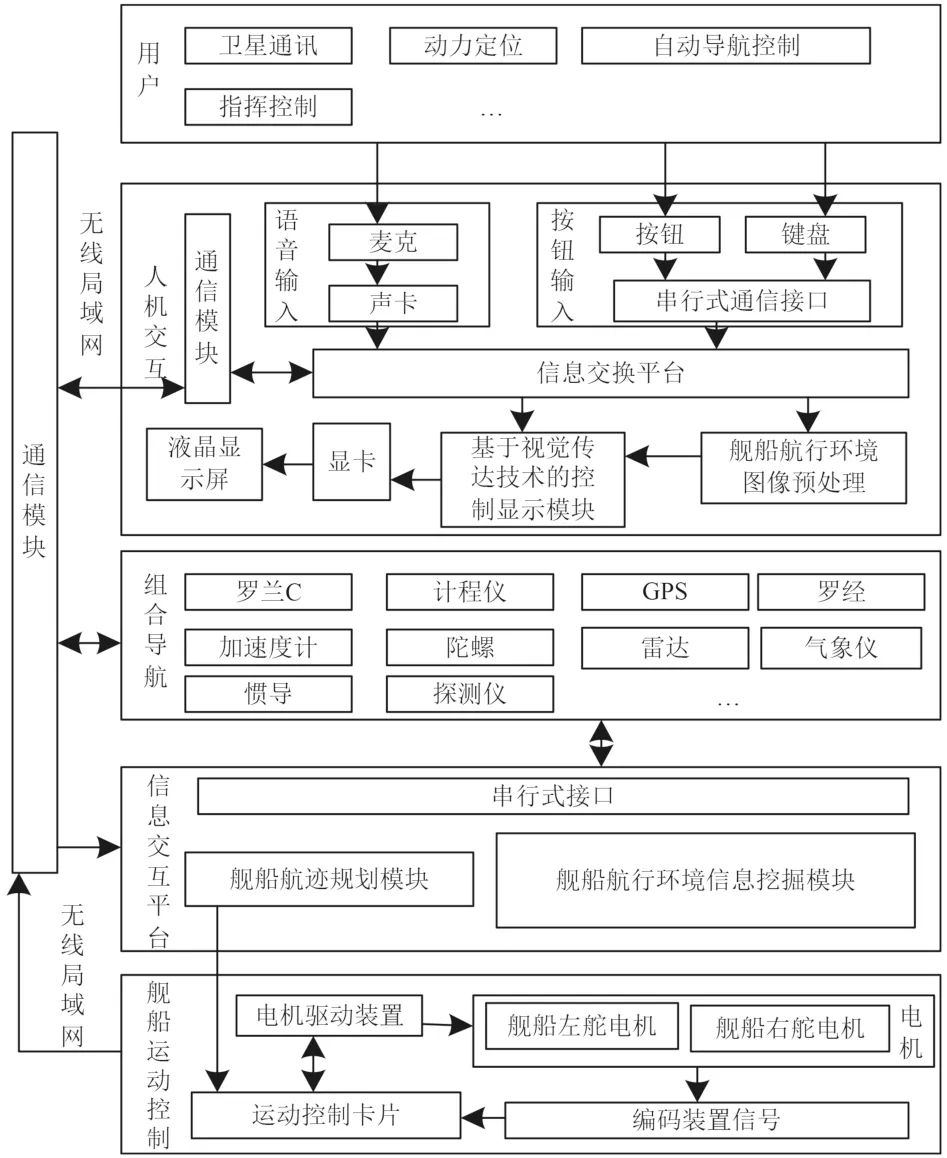
圖1 船舶軌跡界面架構Fig.1 Architecture of ship trajectory interface
在該界面架構中,用戶以語音輸入模塊為可靠輸入媒介,輸入航跡界面控制指令,并以無線局域網為可靠傳輸媒介將相應的控制指令發送至信息交互平臺。與此同時,通過信息交互平臺的航行環境信息挖掘模塊與組合導航模塊中的各種傳感裝置互聯,完成相應的船舶導航以及航行環境信息采集工作,并形成航行環境數據集。而后通過信息交互平臺的航跡規劃模塊利用形成的航行環境數據集,規劃與控制船舶航跡。船舶航跡控制與規劃完成后,將航跡規劃結果通過通信模塊發送至控制顯示模塊實施合理顯示,合理呈現船舶航跡以及航行環境。
1.2 信息交互平臺設計
對信息交互平臺實施合理設計,實現船舶航行環境信息合理交互,是保障船舶航跡界面設計合理性的必要前提[6]。本文利用B/S 架構以及ZigBee 開發機制對該信息交互平臺進行網絡設計,最終設計出的信息交互平臺技術架構如圖2 所示。
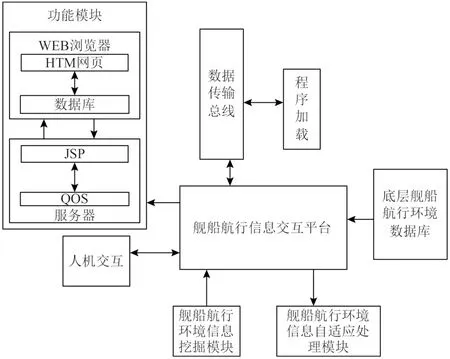
圖2 信息交互平臺技術架構Fig.2 Technical architecture of information interaction platform
該技術架構在嵌入類Linux 環境內實施合理開發,組網通過ZigBee 協議實施合理設計,并通過QOS編譯技術對數據庫實施交叉編譯控制,利用ARM 芯片實施Linux 內核合理觸發,與此同時,利用MPLL鎖相環的作用,產生船舶航行環境信息交互控制時所需要的時鐘脈沖。
1.3 視覺傳達技術在船舶航跡界面設計中的應用
1.3.1 視覺傳達技術船舶航跡圖形界面搭建
運用合適的圖形套件對船舶航跡圖形界面實施合理設計是讓設計的船舶航跡界面擁有較為理想視覺傳達效果的關鍵。本文使用隸屬視覺傳達技術范疇的Qtopia 圖形類套件對船舶航跡圖形界面實施合理搭建,搭建流程總結如下:
1)在PC 端建立可靠的開發環境。
2)使用Qtopia 圖形類套件中的desineg 對船舶航跡圖形界面實施合理設計。按船舶航跡界面開發需求,在qvfb 中對交叉編譯類工具進行設置,而后于應用性程序開發板對該交叉編譯類工具實施合理運行。該項工作完成后,在Qtopia 圖形數據庫中對要使用的船舶航跡界面設計庫文件執行有效復制操作,并通過autoconfig 工具獲得相應的Makefile 文件,對該文件執行交叉編譯操作并將其復制至文件系統中,與此同時使Linux 運行腳本處于啟動狀態,并向其內導入Qtopia環境類變量聲明,在該時刻把關于船舶航跡的圖形界面導入至用戶端界面,完成船舶航跡圖形界面設計。
1.3.2 控制顯示模塊視覺傳達功能設計
控制顯示模塊視覺傳達功能設計是實現船舶航跡界面設計的有效基礎。控制顯示模塊視覺傳達功能主要指電子海圖顯示、船舶航跡管理等功能,具體的控制顯示模塊視覺傳達功能架構如圖3 所示。

圖3 控制顯示模塊視覺傳達功能架構Fig.3 Control display module visual communication function architecture
1.4 基于改進蟻群算法的船舶航行軌跡規劃
采集到的船舶航行環境信息,使用改進蟻群算法完成船舶航行軌跡規劃[7],并將最終的船舶航行軌跡規劃結果返回到控制顯示模塊實施合理顯示,與此同時將其保存至軌跡再現功能模塊。改進蟻群算法船舶航行軌跡規劃過程可簡單歸納為以下幾點:
步驟1針對要進行航行軌跡規劃的船舶,以電子海圖數據以及采集到的船舶航行環境數據為可靠依據,構建與船舶實際航行環境密切相關的柵格模型,對船舶起始點以及目標點、障礙區域以及規避航路點實施合理設置。本文為有效避免規劃航跡同障礙區域發成重疊現象,對柵格模型內包含障礙物執行了膨化處理操作。
步驟2船舶航跡多目標規劃模型構建。在實際的船舶航行中,在充分保障船舶航行安全以及穩定性的同時,也應對船舶航線距離以及其平均性偏離度加以考慮,從該角度對船舶航跡多目標規劃模型實施合理構建,構建出的船舶航跡多目標規劃模型中包含的2 個目標函數公式為:
式中:ξ(n) 表示航線距離;fn表示第n次船舶航跡穿過的柵格中心點;d(fn,fn+1) 表示fn、fn+1兩個柵格中心點之間的直線距離;N表示柵格的總數量;ψ(n)表示每隔一定間距的規劃航跡與船舶起始位置q0及終止位置qf間連接直線段的中間點的距離偏離比;l(fn)表示fn到船舶起始位置q0及終止位置qf間連接直線段的中間點的距離;表示船舶起始位置q0以及終止位置qf間的長度。
步驟3用 ?表示螞蟻數量,Nmax表示最高迭代次數,a、β分別表示信息素以及啟發函數的重要性程度,Q與v分別表示信息素所擁有的濃度值以及與啟發信息相關的遞減系數,ρ表示信息素在揮發時的系數,ω1、ω2表示航跡長度以及平均性偏離距離權重,對以上參數執行合理設置操作[8]。
步驟4通過人工勢場法計算初始船舶航行軌跡以及節點距離信息,在此基礎上,按改進螞蟻路徑挑選原則挑選下個船舶航行路徑點。
步驟5如果螞蟻到達了目標位置,那么該輪循環完畢,以信息素更新機制為可靠依據執行信息素更新操作。
步驟6判別是否達到最高迭代次數,如果達到,終止操作,輸出規劃出的船舶最優航跡,否則回到步驟4。
1.5 船舶航行環境圖像中值濾波
本文設計的船舶航跡界面不僅可較好呈現規劃出的船舶航行軌跡,還可在呈現船舶航行軌跡的同時,實時呈現當前航行環境,為船舶實際航行的順利開展提供可靠保障。航行環境圖像與其他一些非圖像性質航行數據均通過船舶信息交互平臺的航行環境信息挖掘模塊與組合導航模塊中的各種傳感裝置互聯獲得,非圖形性質數據主要被用于完成相應的船舶航跡規劃,航行環境圖像則會由通信模塊發送至航行環境圖像預處理模塊實施中值濾波處理,而后發送至控制顯示模塊實施合理顯示。航行環境圖像中值濾波的過程用公式可描述為:
式中:h2(i,j) 表示濾波窗口內船舶航行環境圖像中心像素點(i,j)的新灰度值;k、mk(i,j)分別表示內船舶航行環境圖像所擁有的像素點的數量以及像素點所對應的權值;R表示像素初值。
2 實驗與分析
以某40 萬噸級別國際貨運船為實驗對象,將本文設計船舶航跡界面應用于該艘國際貨運船中,驗證本文方法在船舶航跡界面設計工作方面的優勢。該艘貨運船長約306 m,寬約49 m,型深約26 m。船艙容量約為52 m3,船體采用單殼體結構,具有非常大的載貨空間,可滿足大噸位國際貨運運輸任務需求。除此之外,該艘國際貨運船排水量為56 000 t,滿載時的排水量可達67 000 t,航速為14~16 kn,此航速可確保該艘國際貨運船在國際貨運長途航行過程中,運輸效率達到比較理想的狀態。表1 為該船舶航跡界面設計時的參數。
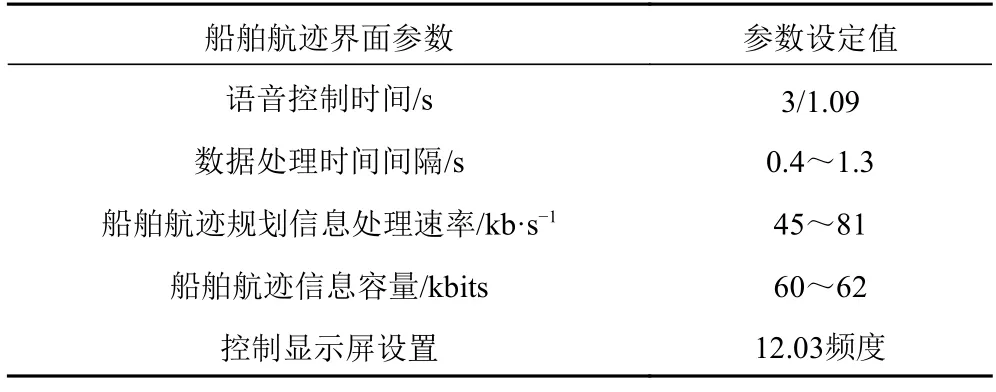
表1 船舶航跡界面設計參數Tab.1 Design parameters of ship trajectory interface
在本文設計的船舶航跡界面中,對船舶航跡進行合理規劃并通過航跡界面實時顯示船舶航跡以及船舶航行環境,以驗證本文方法的有效性。具體的船舶航跡規劃以及船舶航跡與航行環境實時顯示效果如圖4 所示。
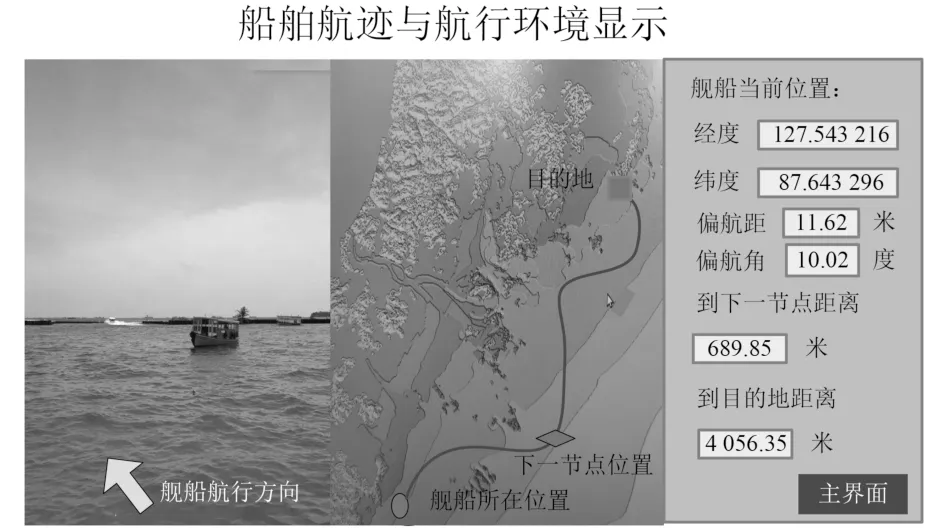
圖4 航跡顯示界面Fig.4 Track display interface
可以看出,應用本文方法可以實現船舶航跡界面設計。設計完成后,在該界面可較好將船舶當前航行環境以及船舶規劃航跡呈現于工作人員面前,還可將船舶實時位置信息、偏航狀況等信息同步呈現,能夠更好滿足實際需要。
為進一步驗證本文方法在船舶航跡設計方面的有效性,繪制不同比例尺狀況下,顯示于本文設計航跡界面的電子海圖,在不同放大倍數條件下的清晰度對比效果圖,并將預處理前后的航行環境圖像效果進行合理對比,獲得的對比結果如圖5 和圖6 所示。

圖5 不同放大倍數電子海圖清晰度Fig.5 Definition of electronic charts with different magnifications
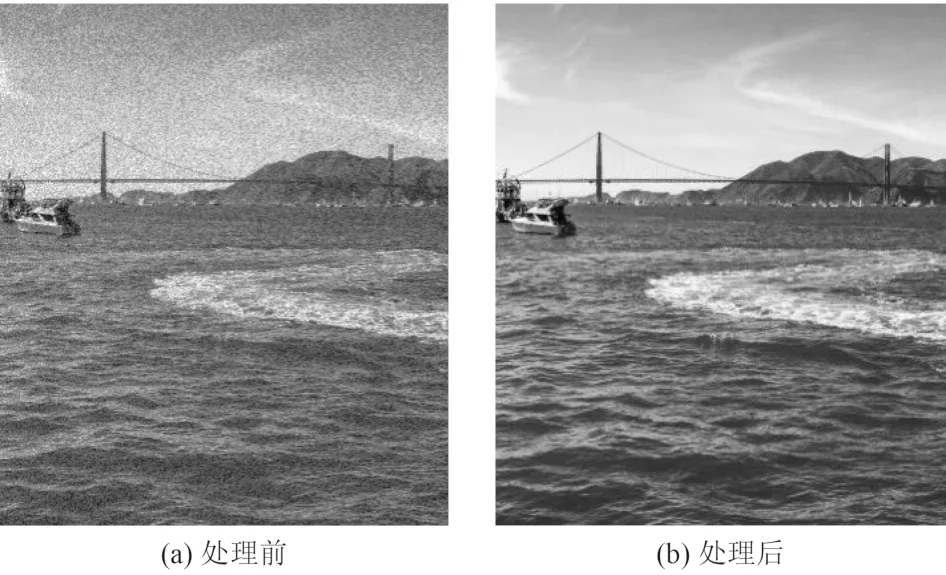
圖6 航行環境圖像預處理效果Fig.6 Image preprocessing effect of ship navigation environment
分析可知,不同比例尺狀況下,顯示于本文設計航跡界面的電子海圖清晰度與放大倍數間存在負相關關系。在相同的放大倍數下,比例尺較大電子海圖呈現出的視覺效果更清晰,且在比例尺較小的情況下,即使放大倍數達到了3.6 倍,呈現出的電子海圖清晰度也能達到0.8 左右。此外,航行環境呈現前的預處理操作,可使采集到的船舶航行圖形中的噪聲元素基本被去除。表明應用本文方法對船舶軌跡界面實施合理設計,可有效降低放大倍數、噪聲元素對軌跡界面呈現電子海圖、航行環境圖像效果產生的不良影響,使駕駛員獲得更理想的視覺體驗感。
3 結語
基于信息交互與傳達技術對船舶航跡界面實施合理設計,并對該方法在船舶航跡界面設計的優越性實施合理驗證。實驗與分析結果顯示,應用該設計方法后,可設計出較理想的船舶航跡界面,保障船舶航行順利進行。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
當代陜西(2020年13期)2020-08-24 08:22:02
中國生殖健康(2020年6期)2020-02-01 06:28:50
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
中國生殖健康(2019年11期)2019-01-07 01:28:02
制造技術與機床(2017年5期)2018-01-19 02:49:17
濰坊學院學報(2016年2期)2016-12-01 13:00:11
