一種神經網絡的艦船目標噪聲提取和分類技術
2023-12-04 06:38:10吳建軍
艦船科學技術 2023年20期
孫 航,吳建軍,李 林
(開封大學,河南 開封 475000)
0 引言
隨著現代各類電子信息技術的快速發展,船舶的部分噪聲輻射有所降低,因此對船舶目標的噪聲提取以及識別分類顯示更加重要[1]。艦船在航行過程中,由于其裝載的機械設備在不停的運轉,因此必定會向四面八方傳播各類噪聲,并且這些噪聲通過水和空氣傳播到很遠的地方。若被遠處的水聽器接收到,則這些噪聲變成海洋中目標識別的干擾源之一[2]。當前世界各國對艦船的低噪聲發展越來越重視,因此導致船舶目標噪聲的判斷與識別變得越來越難,僅僅依靠人工判斷很難滿足現階段的需求[3]。本文基于神經網絡技術,研究船舶目標噪聲的提取和分類技術,這有助于船舶噪聲識別技術的發展。
1 神經網絡技術
1.1 卷積神經網絡技術
現代科學技術的進步促進了深度學習技術的發展。深度學習的相關理論技術已經得到了廣泛的應用,例如多目標分類[4]。為了降低整個神經網絡的計算量,提升卷積運算的效率,卷積神經網絡在卷積過程中為每個卷積運算核都提供權值共享,這樣可以降低整個卷積神經網絡中的參數量。卷積神經網絡在進行多維圖像處理的過程中,可以對圖像直接進行卷積運算,這樣可以省略圖像特征提取以及數據重構的過程[5]。卷積神經網絡憑借著自身強大的特征提取以及學習能力,使得其對圖像的識別具備平移不變性,其結構如圖1 所示。
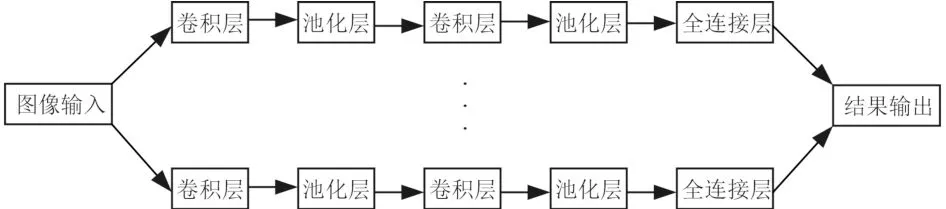
圖1 卷積神經網絡整體結構Fig.1 The overall structure of convolutional neural networks
利用卷積層,卷積神經網絡能夠對輸入圖像進行特征提取,最終得到圖像的特征圖。卷積神經網絡中卷積核權重的優化學習過程叫做卷積神經網絡的訓練,一般利用反向傳播算法對卷積核權重進行優化。卷積層的算法如下式:
在整個卷積神經網絡運算過程中池化層具有十分重要的作用。池化層能夠確保圖像的局部特征不會發生形變。平均池化和最大池化是卷積神經網絡中最常用的2 種池化操作。卷積神經網絡的池化算法如下式:
在卷積神經網絡中需要將所有二維圖像的特征值整合成一維的圖像特征值,然后通過全連接層以及激活函數的響應可以得到整個卷積神經網絡中全連接層的輸出,如下式:
式中,bl為偏置項。
1.2 神經網絡學習過程
在正向傳播過程中,神經網絡需要將誤差信息按照原有的鏈路傳送回去,并且利用調整神經元權重值的方法,不斷向神經網絡的輸入層進行傳遞并計算,接著執行正向傳播過程,通過反復使用正反2 個傳播過程,不斷降低誤差的數值,最終獲得期望的數值[6]。隱層輸出的算法和輸出層的輸出函數算法分別如下式:
在反向傳播過程中,需要對前一層的權重值進行優化,神經網絡中權值的調整量計算方法和權重值的調整方法分別如下式:
由于傳統的神經網絡學習方法的收斂時間比較長,針對傳統神經網絡學習方法的缺陷,可以采用附加動量以及可變學習速度的方法進行調整,其權值調整公式為:
采用可變學習的方法也可以達到提升收斂速度的目的,如果迭代之后的誤差降低,則下次迭代的步長增大。可變學習方法的權值修正方法如下式:
式中:η為學習步長,是一個固定數。針對固定學習步長的缺點,可以采用變步長的學習方法,將學習步長看成一個可以變化的量,學習步長的修正方法和誤差變化率的計算方法分別如下式:
2 艦船目標噪聲建模仿真分析
艦船在海上航行過程中,由于船上機械設備的運動以及艦船自身的航行運動,因此會以艦船為中心向四周傳播噪聲,水中產生的噪聲可以成為目標信號。接收到的目標噪聲是多種噪聲合成的結果,包括機械振動、螺旋槳旋轉、海水流動等。其中螺旋槳在正常旋轉過程中,葉片的尖端的線速度能夠達到數十米每秒,螺旋槳葉片的振動噪聲滿足下式:
經過大量的經驗測量發現,可以采用一個正弦函數來模擬低頻線譜,如下式:
式中:fi為頻率;ai為幅值;?i為相位。艦船噪聲低頻線譜波形如圖2 所示,可以看出,歸一化之后的幅值范圍為-0.4~0.4。
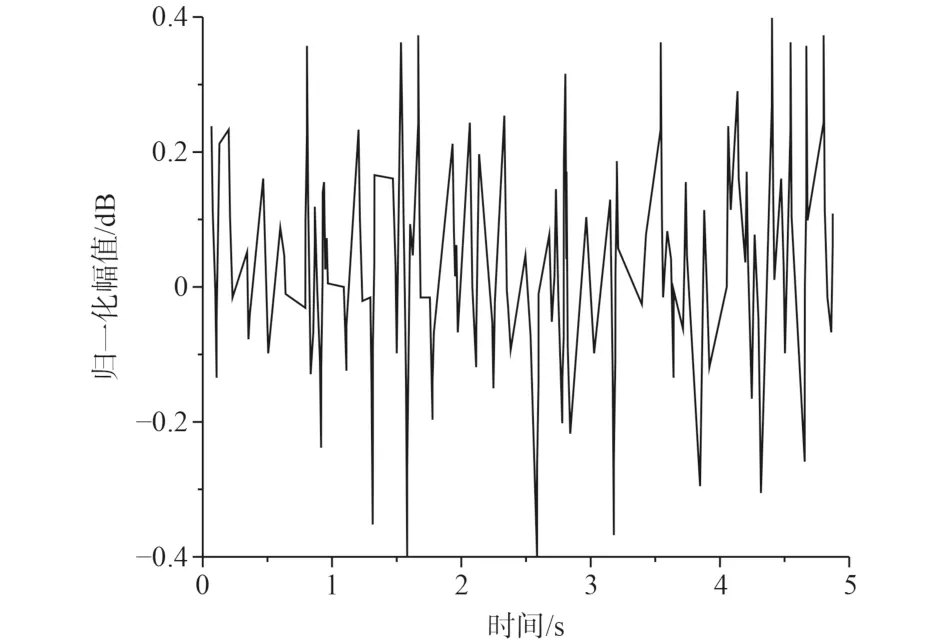
圖2 艦船噪聲低頻線譜波形Fig.2 Low frequency line spectrum waveform of ship noise
為了能夠進行連續譜的仿真,則需要將螺旋槳噪聲經過一個FIR 濾波器,濾波后可以得到連續分量的噪聲。使用巴特沃斯濾波進行FIR 濾波,該濾波器的頻率響應曲線如圖3 所示。經過調制的船舶目標噪聲的時域曲線的表達式如下式:
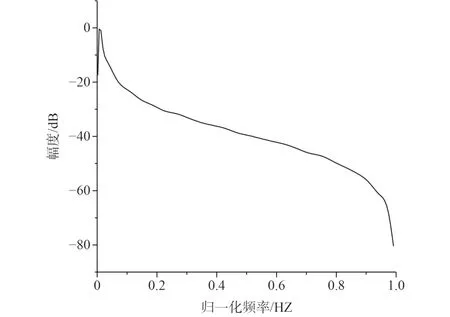
圖3 濾波器頻率響應曲線Fig.3 Filter frequency response curve
式中:l(t)為線譜分量;a(t)為調制信號;c(t)為連續譜信號。船舶目標噪聲中包含了連續譜和窄帶寬線譜2 種頻譜,在進行仿真時,將帶內信噪比和海洋噪聲進行疊加。帶內信噪比的求解方法,如下式:
海洋噪聲功率如圖4 所示。
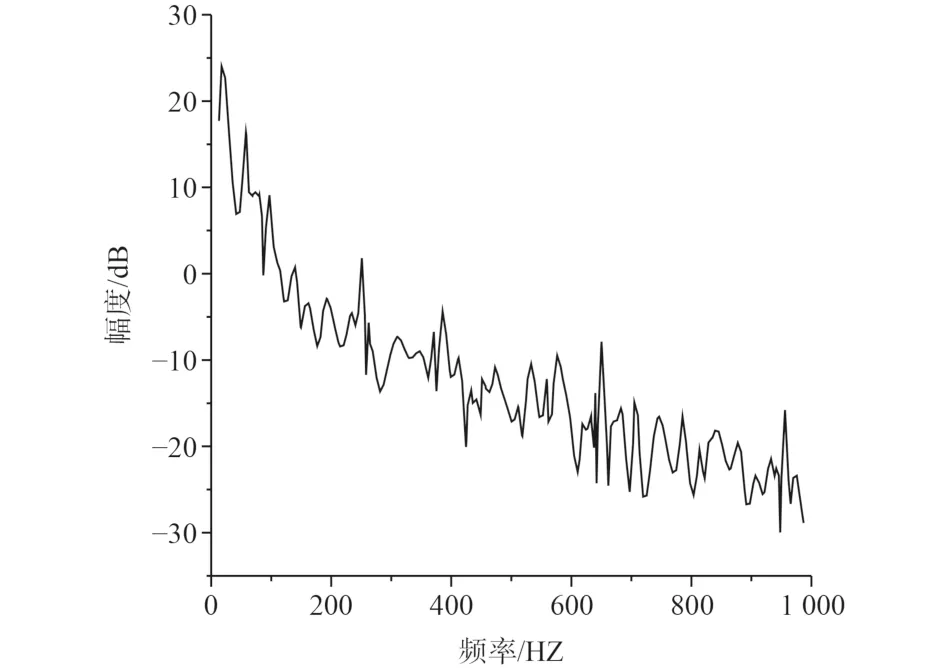
圖4 海洋噪聲功率譜Fig.4 Ocean noise power spectrum
通過艦船目標噪聲的產生原理可以得知,線譜主要有2 種,一種是和船舶螺旋槳轉速相關的,另一種是和船舶螺旋槳轉速無關的,因此該線譜只能靠實際測量的經驗值進行估算,所以本文在仿真過程中采用理想模型來表示該線譜。本文仿真采用的線譜基頻為31 Hz,諧波分量分別為62 Hz、93 Hz、124 Hz,采樣頻率為4 800 Hz,仿真得到曲線如圖5 所示。
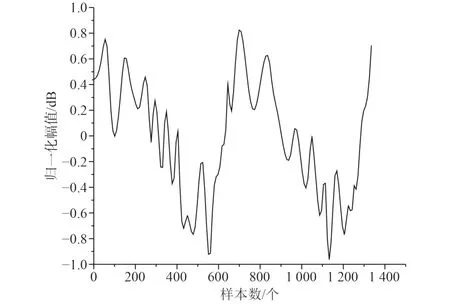
圖5 線譜信號波形曲線Fig.5 Line spectrum signal waveform curve
3 艦船目標噪聲提取及分類
3.1 艦船目標噪聲提取
從人耳的感覺來看,船舶目標噪聲的頻率和音調之間的關系是成正比例關系的,但是本質上音調和頻率之間并不是正比例關系,因此采用Mel 頻率來描述人耳接收到的船舶目標噪聲的非線性特性,Mel 頻率和實際頻率之間的關系如下式:
曲線關系如圖6 所示。
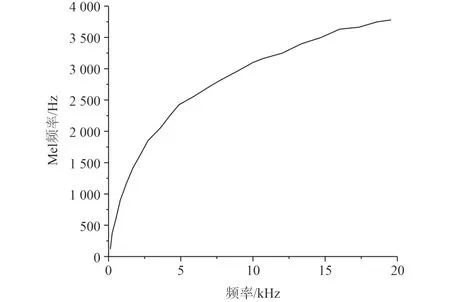
圖6 Mel 頻率和實際頻率之間的曲線關系Fig.6 Curve relationship between Mel frequency and actual frequency
因為艦船目標噪聲的頻譜主要存在于2 500 Hz 以下的低頻段,因此對1.5~23.5EBR 之間的頻段進行噪聲特征響應的提取,通過該方法可以獲得221 維的船舶目標噪聲特性響度的特征值,接著利用PCA 方法可以找到主要的特征,最終可以達到提取主要特征的目的。本文對海上航行艦船產生的噪聲進行響應特征提取,分析的目標樣本數為6 000 點,最終獲得了83 個樣本的特征值。艦船目標噪聲特征響應度曲線如圖7所示,可以看出,噪聲特征響度峰值出現了100 Hz 頻帶附近。艦船目標噪聲特征值大小曲線如圖8 所示,可以看出,船舶目標噪聲的響度特征大部分集中于20 維之前,并且90%以上集中在前10 維。
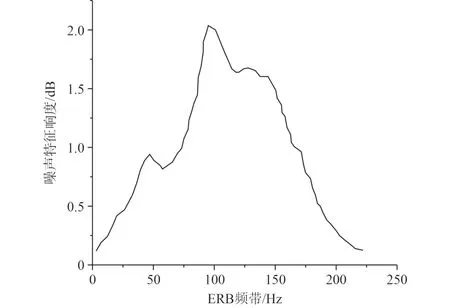
圖7 艦船目標噪聲特征響應度曲線Fig.7 Characteristic response curve of ship target noise
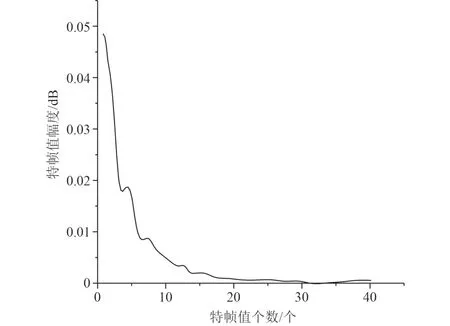
圖8 艦船目標噪聲特征值大小曲線Fig.8 Ship target noise characteristic value size curve
3.2 艦船目標噪聲分類
由于艦船目標噪聲比較復雜,并且每個船舶目標噪聲之間相互交錯,因此本文采用的神經網絡分類器具備非線性隱層。將提取到的艦船目標噪聲的特征矢量輸入船舶目標噪聲分類器中,將一部分的目標噪聲特征樣本用作網絡的訓練,以便能夠得到合適的權值,接著將另外的樣本用作分類檢測。在對艦船目標噪聲進行分類之前,需要從眾多的特征中識別出最有效的特征,這樣能夠更好地進行分類。使用歐式距離測量的方法對船舶目標噪聲特征進行提取,最優特征的判斷方法如下式:
式中:Sb為類間距;Sw為類內距。找到一個合適特征維數使得J達到最大值,從所有特征數D中選擇d個特征數,如下式:
將1 620 個艦船目標噪聲特征樣本分成ABC 三類,每一類又分成訓練樣本和測試樣本,艦船目標噪聲能量特征分類結果如表1 所示。目標噪聲能量特征識別準確率和訓練次數之間的關系如圖9 所示,可以看出,隨著訓練次數的增加,準確率也會逐漸增加。
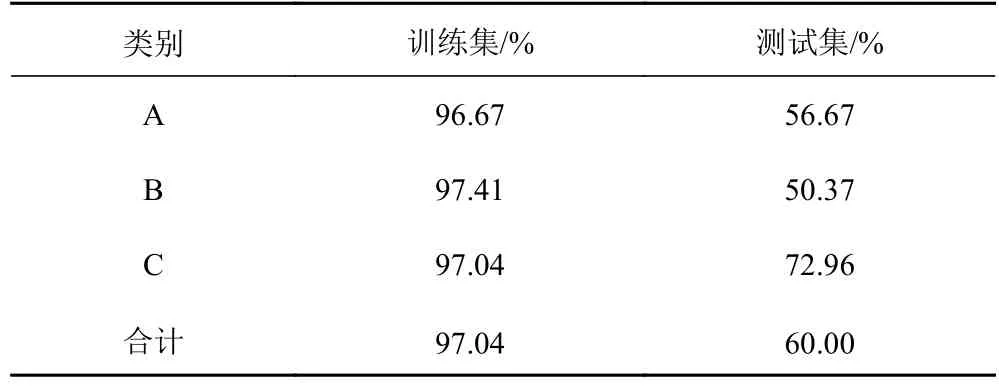
表1 艦船目標噪聲能量特征分類結果Tab.1 Classification results of ship target noise energy features
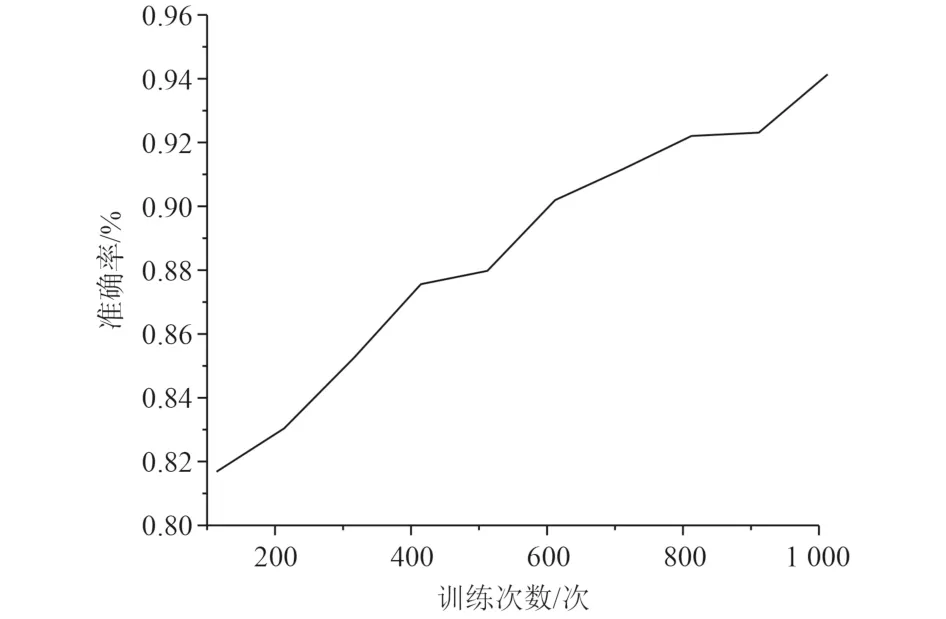
圖9 識別準確率和訓練次數之間的關系Fig.9 Identify the relationship between accuracy and the number of training sessions
4 結語
艦船目標噪聲的識別難度在于其噪聲的產生機制非常復雜,噪聲中的成分比較多,其中包含連續譜和較強的窄帶2 種分量,這使得艦船目標噪聲的特征提取一直是艦船信號處理領域的一個重要問題。在艦船目標噪聲識別過程中最關鍵的步驟在于分類器的選擇。神經網絡的優點主要有分布處理、自主學習、并行計算等。隨著BP 算法的提出,深度神經網絡獲得了跨越式的發展。將神經網絡技術應用到艦船目標噪聲的提取和分類中,可以實現艦船目標噪聲識別技術的智能化發展。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
河南科技(2014年23期)2014-02-27 14:19:15
