基于綜合監(jiān)測(cè)系統(tǒng)的無人船自主航行能力評(píng)價(jià)
2023-12-04 06:37:32陳天宇許凱瑋
艦船科學(xué)技術(shù) 2023年20期
關(guān)鍵詞:評(píng)價(jià)
徐 力,陳天宇,許凱瑋,胡 瓊
(中國船舶科學(xué)研究中心,江蘇 無錫 214082)
0 引言
無人船在海上自主航行時(shí),相比水池與湖泊,更加復(fù)雜的海洋環(huán)境對(duì)無人船的自主航行控制技術(shù)提出了更高的要求,帶來了諸如態(tài)勢(shì)感知系統(tǒng)易受干擾、通信距離遠(yuǎn)、船體運(yùn)動(dòng)受風(fēng)、浪、流影響易偏離預(yù)定航道等挑戰(zhàn)。因此,開展無人船自主航行評(píng)價(jià)技術(shù)研究,對(duì)無人船自主航行控制系統(tǒng)的測(cè)試驗(yàn)證、綜合評(píng)估及后續(xù)提升與改進(jìn)具有現(xiàn)實(shí)意義。
本文在前人研究基礎(chǔ)上[1–3],提出一種無人船自主航行綜合監(jiān)測(cè)系統(tǒng),針對(duì)無人船自主航行時(shí)各關(guān)鍵參數(shù)的監(jiān)測(cè),搜集到無人船自主航行狀態(tài)動(dòng)態(tài)關(guān)鍵數(shù)據(jù),包括航行速度、航向角、首向角、經(jīng)緯度坐標(biāo)等。通過與測(cè)試方發(fā)布的任務(wù)流程以及數(shù)字化實(shí)際海洋環(huán)境的結(jié)合,構(gòu)建數(shù)字化的無人船自主航行場(chǎng)景,通過數(shù)學(xué)方法對(duì)該場(chǎng)景下的無人船自主航行任務(wù)完成情況進(jìn)行綜合評(píng)價(jià),并得到量化結(jié)果[4–5]。
1 無人船自主航行綜合監(jiān)測(cè)系統(tǒng)方案設(shè)計(jì)
綜合監(jiān)測(cè)系統(tǒng)的主要用途是監(jiān)測(cè)無人船在航行過程中產(chǎn)生的關(guān)鍵性能參數(shù),包括航行環(huán)境參數(shù)(風(fēng)速、風(fēng)向)和航行性能參數(shù)(航速、航向、軸轉(zhuǎn)速、軸扭矩、軸功率、縱橫搖、船首和船尾加速度、舵角等),為無人船關(guān)鍵智能系統(tǒng)的陸上聯(lián)調(diào)試驗(yàn)及海上試驗(yàn)提供支撐,為無人船自主航行效能的評(píng)估打下基礎(chǔ)。
無人船自主航行綜合監(jiān)測(cè)系統(tǒng)主要分為船載子系統(tǒng)、船岸通信子系統(tǒng)以及岸基子系統(tǒng)3 部分,如圖1所示。
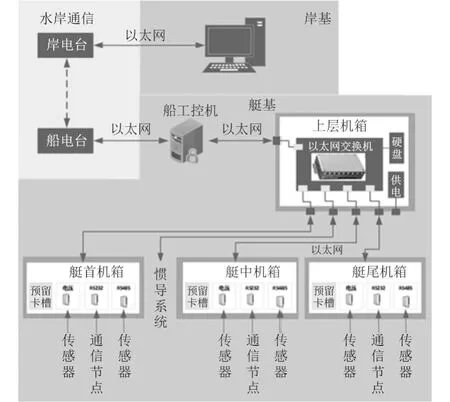
圖1 無人船綜合監(jiān)測(cè)系統(tǒng)組成Fig.1 Composition of a comprehensive monitoring system for the unmanned surface vehicle
1.1 船載子系統(tǒng)
船載子系統(tǒng)主要實(shí)現(xiàn)對(duì)船上數(shù)據(jù)的實(shí)時(shí)采集、儲(chǔ)存、處理和管理,實(shí)現(xiàn)無人船實(shí)時(shí)狀態(tài)監(jiān)測(cè),并將監(jiān)測(cè)結(jié)果通過通信子系統(tǒng)發(fā)送至岸基子系統(tǒng)。主要包括信號(hào)采集節(jié)點(diǎn)(船首/船中/船尾)、綜合監(jiān)測(cè)節(jié)點(diǎn)、船端工控機(jī)和各類測(cè)試傳感器。
信號(hào)采集節(jié)點(diǎn)主要由FPGA 機(jī)箱與信號(hào)模塊組成,負(fù)責(zé)將傳感器采集的RS232 信號(hào)、RS485 信號(hào)、電壓信號(hào)和以太網(wǎng)信號(hào)轉(zhuǎn)化或保持為以太網(wǎng)信號(hào)。輸入端為上述各種信號(hào)插口,輸出端均為以太網(wǎng)插口。
綜合監(jiān)測(cè)節(jié)點(diǎn)主要包括存儲(chǔ)硬盤、以太網(wǎng)交換機(jī)、適配電源、電源管理器,負(fù)責(zé)對(duì)采集節(jié)點(diǎn)發(fā)送來的信號(hào)進(jìn)行預(yù)處理、顯示、存儲(chǔ)、數(shù)據(jù)處理,將采集數(shù)據(jù)實(shí)時(shí)發(fā)送到船載工控機(jī),以及接收船載工控機(jī)及測(cè)試軟件的配置、啟動(dòng)停止等控制命令。
船載工控機(jī)主要用于測(cè)試與評(píng)估軟件的搭載,以及對(duì)包括通信模塊在內(nèi)的整個(gè)系統(tǒng)進(jìn)行控制。
1.2 船岸通信子系統(tǒng)
船岸通信子系統(tǒng)主要提供無人船與岸基之間的無線通信鏈路能力,采用無線電臺(tái),負(fù)責(zé)水上平臺(tái)與岸上平臺(tái)間的實(shí)時(shí)數(shù)據(jù)傳輸,包括船端和岸基兩部分,如圖2 所示。主要功能包括:船上無線電臺(tái)通過通信接口接收船載綜合監(jiān)測(cè)子系統(tǒng)獲取的無人船自主航行狀態(tài)數(shù)據(jù),并通過無線方式發(fā)送至岸基,岸基接收到平臺(tái)端發(fā)送來的數(shù)據(jù)后,通過通信接口將數(shù)據(jù)傳輸至岸基工控機(jī)。船端和岸基無線電臺(tái)設(shè)備完全相同,均具備接收和發(fā)送功能。
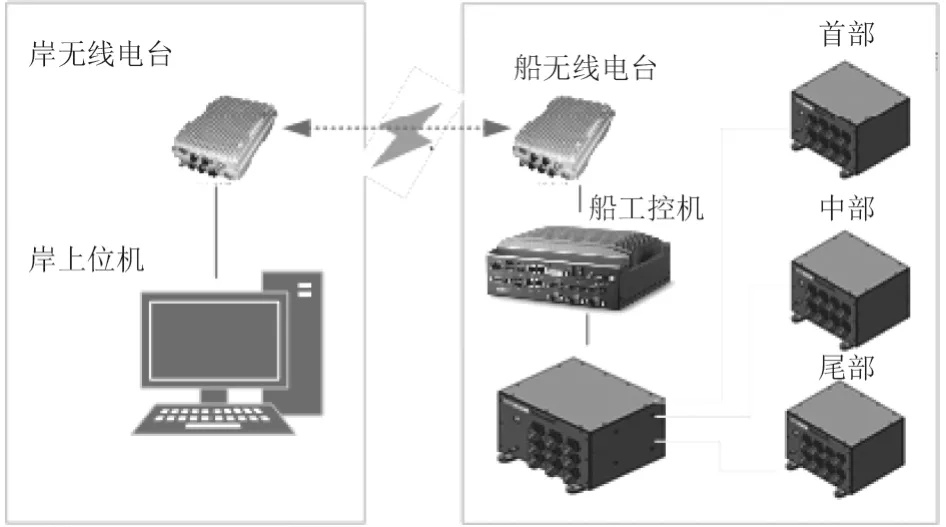
圖2 艇岸通信模塊架構(gòu)圖Fig.2 Architecture diagram of boat-to-shore communication module
1.3 岸基子系統(tǒng)
岸基子系統(tǒng)包括岸基服務(wù)器和運(yùn)行于服務(wù)器的上位機(jī)軟件,主要用于實(shí)時(shí)顯示無人船航行狀態(tài)數(shù)據(jù)、航后船載終端積累的大量采集數(shù)據(jù)等,在此基礎(chǔ)上,實(shí)現(xiàn)狀態(tài)監(jiān)控及無人船自主航行能力評(píng)估等應(yīng)用。同時(shí),也可通過岸船一體化設(shè)計(jì),實(shí)現(xiàn)對(duì)船端更加靈活的擴(kuò)展能力和功能升級(jí)。岸基子系統(tǒng)主要功能包括:
1)配置和傳感器相關(guān)的采集模塊的參數(shù),如設(shè)定傳感器零位、采樣頻率等;
2)對(duì)整個(gè)無人船綜合監(jiān)測(cè)系統(tǒng)的控制;
3)對(duì)上傳的數(shù)據(jù)進(jìn)行實(shí)時(shí)顯示,包括頻譜、特征量等信息;
4)對(duì)數(shù)據(jù)有二次處理功能,包括積分、數(shù)值統(tǒng)計(jì)等;
5)對(duì)由通信系統(tǒng)發(fā)來的船端采集數(shù)據(jù)進(jìn)行存儲(chǔ)與回放。
2 無人船自主航行能力評(píng)價(jià)
基于無人船綜合監(jiān)測(cè)系統(tǒng),將采集到的數(shù)據(jù)通過通信模塊以u(píng)dp 報(bào)文的形式傳輸至岸端工控機(jī),再將報(bào)文數(shù)據(jù)以.xls 文件的形式進(jìn)行儲(chǔ)存。
結(jié)合自主避碰、自主循跡等自主航行任務(wù)下的具體場(chǎng)景,建立指標(biāo)體系,針對(duì)指標(biāo)進(jìn)行解耦,建立試驗(yàn)數(shù)據(jù)與指標(biāo)之間的數(shù)學(xué)模型。通過讀取存儲(chǔ)的試驗(yàn)數(shù)據(jù),對(duì)指標(biāo)進(jìn)行量化計(jì)算,從而得出量化評(píng)估結(jié)果。
2.1 自主航行評(píng)價(jià)內(nèi)容
針對(duì)無人船自主航行的任務(wù)科目進(jìn)行劃分,重點(diǎn)對(duì)自主循跡與自主避碰這2 項(xiàng)具有代表性的任務(wù)科目進(jìn)行測(cè)試與評(píng)價(jià)的技術(shù)研究。
2.1.1 自主循跡測(cè)試評(píng)價(jià)方法
自主循跡的測(cè)試指標(biāo)分為效能指標(biāo)、功能指標(biāo)與性能指標(biāo)。效能指標(biāo)主要指循跡總時(shí)間T;功能指標(biāo)主要是指包括起始點(diǎn)在內(nèi)的必過點(diǎn)穿行情況;性能指標(biāo)包括:航跡偏距,航向角偏差。
將航行數(shù)據(jù)進(jìn)行采樣,采樣頻率為1 Hz。該組數(shù)據(jù)包括時(shí)間、無人船經(jīng)緯度坐標(biāo)、無人船航向、舵角信號(hào)。
將無人船經(jīng)緯度坐標(biāo)轉(zhuǎn)化為直角坐標(biāo),得到位置數(shù)據(jù)(xn,yn),輸入任務(wù)場(chǎng)景中的必過點(diǎn)數(shù)據(jù)(X,Y)。通過每組2 個(gè)必過點(diǎn)坐標(biāo),得到預(yù)計(jì)航線在此直角坐標(biāo)系上的表達(dá)式:AX+BY+C=0,式中A,B,C為固定實(shí)數(shù)。
得到如下公式:
將所有航跡點(diǎn)數(shù)據(jù)代入對(duì)應(yīng)的航跡中計(jì)算,得到航行偏差即航跡截距數(shù)組[Dn],求該組數(shù)據(jù)的平均值與均方差值MSE (Dn)。
計(jì)算每相鄰航跡點(diǎn)形成的直線,得到Axn+Byn+C=0,式中An,Bn,Cn為固定實(shí)數(shù)。計(jì)算該直線的航向,即瞬時(shí)航向與預(yù)定航向之間的夾角,如下式:
如存在,且時(shí)間序列上不存在紊亂與重復(fù),則認(rèn)為必過點(diǎn)穿越成功。
2.1.2 自主避碰測(cè)試評(píng)價(jià)方法
自主避碰的測(cè)試指標(biāo)分為效能指標(biāo)、性能指標(biāo),效能指標(biāo)主要包括總耗時(shí)T;性能指標(biāo)包括時(shí)效性,避碰有效性。
在避碰規(guī)則中,當(dāng)兩船航向相交時(shí),海事規(guī)則中涉及“碰撞危險(xiǎn)”、“緊迫局面”與“緊迫危險(xiǎn)”這3 種安全距離的概念。“碰撞危險(xiǎn)”即為兩船接近至存在碰撞危險(xiǎn)的距離[6]。“緊迫局面”則是指兩船接近至僅憑讓路船的避讓行動(dòng)無法保證不發(fā)生碰撞的距離。“緊迫危險(xiǎn)”是指碰撞危險(xiǎn)即將發(fā)生的距離。3 種距離的碰撞危險(xiǎn)程度依次增加,但海事規(guī)則中并未明確規(guī)定這些距離的具體取值[7]。因此在進(jìn)行指標(biāo)評(píng)價(jià)之前需要將這些距離作約定。且針對(duì)這些距離對(duì)于操作的指導(dǎo)做出約定。對(duì)于避碰系統(tǒng)評(píng)價(jià)方法,可以將上述距離簡化為2 個(gè),一個(gè)是避碰機(jī)動(dòng)期間不應(yīng)當(dāng)?shù)竭_(dá)的距離可以叫做“避碰危險(xiǎn)距離”;另一個(gè)避碰機(jī)動(dòng)應(yīng)當(dāng)開始時(shí)的距離可以叫做“避碰距離”[8]。
針對(duì)最常見的互見情形下的兩船對(duì)遇問題,危險(xiǎn)避碰距離可記作D1,表達(dá)如下[9]:
避碰距離可以記作D2,表達(dá)式如下:
式中:L為船舶長度,K為兩船速度之比,?δ 為兩船航向交角,Da為安全距離一般取12 n mile。
1)避碰有效性評(píng)價(jià)
將無人船經(jīng)緯度坐標(biāo)轉(zhuǎn)化為大地直角坐標(biāo),得到位置數(shù)據(jù)(xn,yn),輸入任務(wù)場(chǎng)景中的障礙物坐標(biāo)(x,y)。計(jì)算危險(xiǎn)避碰距離D1,實(shí)時(shí)計(jì)算(每秒刷新)每組位置數(shù)據(jù)(xn,yn)與各障礙物之間的距離:
2)避碰時(shí)效性評(píng)價(jià)
了解被測(cè)對(duì)象的內(nèi)在邏輯,了解其避碰的判斷閾值。當(dāng)觀測(cè)到該值作為信號(hào)輸入到避碰系統(tǒng)時(shí)開始計(jì)時(shí)t1,同時(shí)開始監(jiān)測(cè)智能船關(guān)鍵部件(機(jī)槳等)信號(hào),當(dāng)監(jiān)測(cè)到信號(hào)開始按照避碰操作變換時(shí)記錄時(shí)間t2。計(jì)算時(shí)效性指標(biāo) ?t=t2-t1。
3)避碰經(jīng)濟(jì)性評(píng)價(jià)
當(dāng)障礙物出現(xiàn),且智能船關(guān)鍵部件(機(jī)槳等)信號(hào)發(fā)生顯著變化,即舵角信號(hào)出現(xiàn)大幅持續(xù)的脈沖信號(hào),以及主機(jī)轉(zhuǎn)速或功率有持續(xù)的明顯下降時(shí)。記錄避碰操作開始時(shí)刻,記作T1,并計(jì)算此時(shí)笛卡爾坐標(biāo)系上的航跡表達(dá)式:Ax+By+C=0,式中A,B,C為固定實(shí)數(shù)。
當(dāng)目標(biāo)船駛離避碰距離D2,且智能船行駛回初始航跡Ax+By+C=0,即測(cè)試船完成復(fù)航時(shí)。記錄避碰結(jié)束時(shí)刻T2。
于是,避碰過程總耗時(shí) ?T=T2-T1。
4)操舵頻次評(píng)價(jià)
對(duì)于任務(wù)期間的指令舵角狀態(tài)進(jìn)行監(jiān)測(cè)與數(shù)據(jù)記錄,得到航行期間舵角的變化次數(shù)以及變化曲線,如圖3 所示。
2.2 自主循跡任務(wù)評(píng)價(jià)實(shí)例
如圖4 所示,在一片開闊水域內(nèi),對(duì)自主航行系統(tǒng)輸入包括起始點(diǎn)在內(nèi)的6 個(gè)必過點(diǎn)。根據(jù)試驗(yàn)船船長25 m,給定必過點(diǎn)穿越半徑為50 m。轉(zhuǎn)化經(jīng)緯度坐標(biāo),將包括時(shí)間、經(jīng)緯度坐標(biāo)、航跡角、航向角在內(nèi)的監(jiān)測(cè)數(shù)據(jù)以及任務(wù)場(chǎng)景參數(shù)代入評(píng)價(jià)算法程序,結(jié)合自主循跡任務(wù)測(cè)評(píng)方法得到自主航行評(píng)價(jià)結(jié)果。
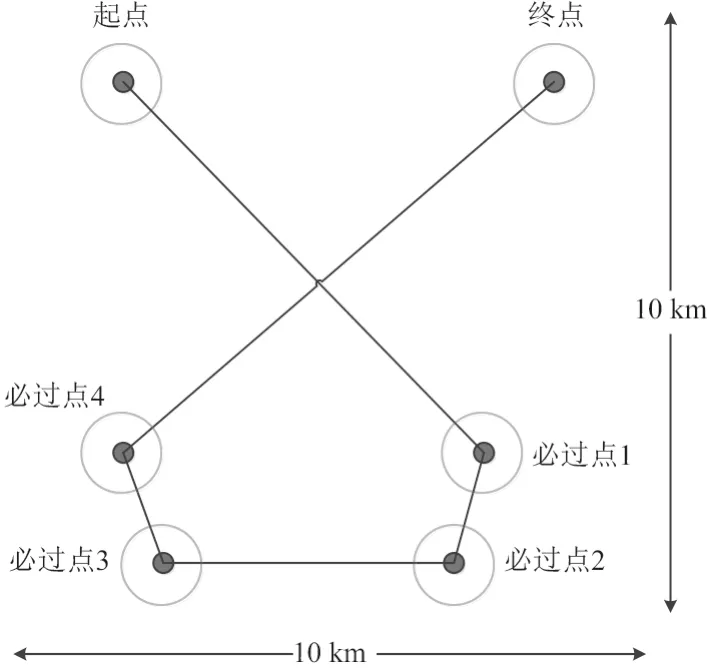
圖4 無人船自主循跡試驗(yàn)場(chǎng)景示意圖Fig.4 Schematic diagram of the autonomous tracking test scene of unmanned surface vehicle
將每2 個(gè)必過點(diǎn)之間的航跡視作一段航跡線,共得到5 段航跡線,通過與理想航跡(兩必過點(diǎn)之間的直線)對(duì)比,得到航跡截距與航向偏差指標(biāo),如表1所示。
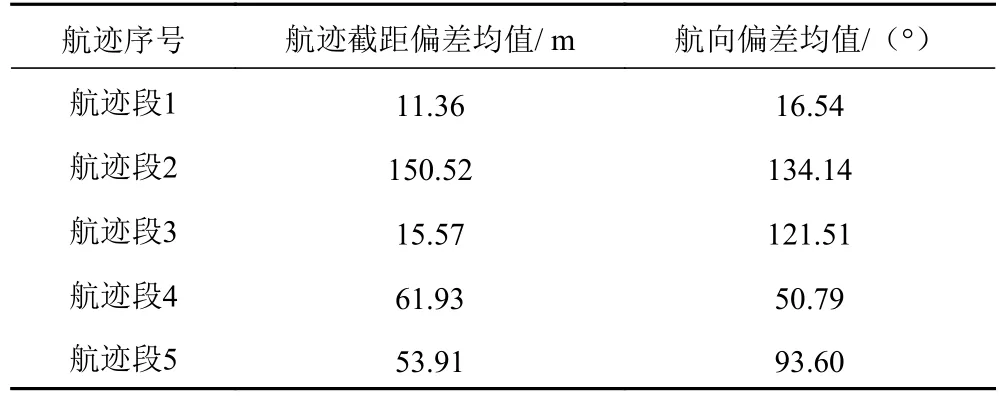
表1 自主循跡任務(wù)評(píng)價(jià)計(jì)算結(jié)果Tab.1 Autonomous tracking task evaluation calculation results
由循跡全過程中數(shù)據(jù)時(shí)間序列的總長度可知,此次自主循跡完成的總時(shí)長T為64 min。
針對(duì)每一個(gè)必過點(diǎn),均有相距小于等于穿越半徑50 m,因此認(rèn)為循跡成功,但是距離誤差(偏距)與航向角的誤差較大,各航次平均偏距差值為58.7 m,各航次航向平均誤差為83.3°。考慮到進(jìn)行循跡測(cè)試時(shí)測(cè)試場(chǎng)內(nèi)存在非合作障礙物,被試艇既要進(jìn)行循跡試驗(yàn)又要對(duì)這些非合作障礙物進(jìn)行避障操作,因此此次測(cè)試結(jié)果無法代表該操控系統(tǒng)在循跡功能上的真實(shí)水平,但是由必過點(diǎn)均穿越成功這一結(jié)果可以得知該操作系統(tǒng)能有效進(jìn)行循跡操作。
3 結(jié)語
本文結(jié)合無人船自主航行實(shí)船測(cè)試需求,結(jié)合多維信息統(tǒng)一采集、船-岸-海協(xié)同測(cè)量與模塊化設(shè)計(jì)技術(shù)提出并設(shè)計(jì)一種無人船自主航行綜合監(jiān)測(cè)與評(píng)價(jià)系統(tǒng)。在此基礎(chǔ)之上,從功能、效能出發(fā),構(gòu)建無人船在自主循跡和自主避碰作業(yè)場(chǎng)景下的評(píng)價(jià)指標(biāo)體系,開展自主航行試驗(yàn)數(shù)據(jù)與評(píng)價(jià)指標(biāo)之間的數(shù)學(xué)模型構(gòu)建工作,完成了對(duì)無人船自主航行性能的量化評(píng)價(jià)技術(shù)研究,為無人船自主航行的測(cè)評(píng)與后續(xù)改進(jìn)提供依據(jù)。
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2021年10期)2021-03-02 05:52:06
現(xiàn)代檢驗(yàn)醫(yī)學(xué)雜志(2016年3期)2016-11-15 01:59:56
中學(xué)語文(2015年21期)2015-03-01 03:52:11
中國教育技術(shù)裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
西南軍醫(yī)(2015年1期)2015-01-22 09:08:16
中國音樂教育(2014年9期)2014-05-20 10:26:24
治淮(2013年1期)2013-03-11 20:05:18
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
