基于模糊PID算法的公路瀝青混凝土攤鋪機行駛速度控制
2023-12-07 07:37:52田硯軍
工程機械與維修 2023年6期
田硯軍


摘要:當前混凝土攤鋪機行駛速度控制模型多采用單向控制模式,如果操作控制偏差較大,容易導致靜差率增加,既對機器造成了損壞,也大幅降低了對路面混凝土的攤鋪質量。為此,根據公路實際測定需求及采取標準,建立智能恒速程序設定行駛控制邏輯,通過綜合模糊PID算法構建行駛速度自適應控制模型,最后采用區域轉換調整方式實現對攤鋪機行駛速度的控制。通過5個路段的測定,獲取的行駛速度控制率下降至30%以下,具有較好的實用價值。
關鍵詞:瀝青混凝土;模糊PID算法;攤鋪機;行駛速度;控制方法
0? ?引言
在瀝青路面施工中,需要根據路面承壓值,利用混凝土攤鋪機對路面進行攤鋪施工,確保路面平整度及密實度符合標準。在對瀝青混凝土路面進行攤鋪作業中,攤鋪機行駛速度的控制是影響攤鋪壓實效果的關鍵因素。在攤鋪作業過程中,攤鋪機會依靠機器自身的浮動性,通過自找平原理,保障路面攤鋪壓實的穩定性和平整性。
高海波等[1]開展了基于3D機械控制瀝青路面智能攤鋪施工技術應用研究,楊劉虎[2]開展了3D數字化攤鋪機控制系統的應用研究。這類控制模型雖然可以完成公路預期的攤鋪壓實目標,但針對性不強,在實際作業中對于速度的控制仍然不夠精準,常常因受到外部環境的影響而導致攤鋪機失控,對施工區域瀝青路面造成較大破壞及損傷。為此,文章提出一種基于模糊PID算法的公路瀝青混凝土攤鋪機行駛速度控制技術。
1? ?構建攤鋪機行駛速度模糊PID核算控制方法
公路瀝青混凝土攤鋪機的行駛性能,會直接影響路面施工的平整度、初始密實度以及攤鋪的離析程度。作為混凝土攤鋪機的核心控制部件,行駛系統控制器不僅用于實現對攤鋪機行走的有效控制,還可以起到提高攤鋪機行駛性能、自動化控制程度,以及提高工作效率和改善瀝青混凝土路面施工質量等作用。
模糊PID算法是一種動態化的推算方法,它主要是以誤差值和誤差變化作為輸入值,采用模糊測算規則對某一時段的數據進行結果推算,并將該算法融入到公路瀝青混凝土攤鋪機行駛速度的控制程序中,從而實現對機械行駛速度誤差控制的目的[3]。
1.1? 構建智能恒速控制程序
恒速程序是早期對攤鋪機進行處理的一種動態化控制結構,它多被應用于瀝青混凝土攤鋪施工作業中[4]。近年來,隨著我國公路修建數量的逐年增加,傳統的定向恒速控制程序已經無法滿足工程建設的需求,需要結合智能化的計算機技術,對恒速控制程序進行優化提升及完善。
首先需要根據處理道路的寬度和厚度,對攤鋪機的技術指標和參數進行修正調整。攤鋪機不安裝自動找平裝置,雖然能夠完成預期的攤鋪作業,但無法更好地確保路面施工的平整度,缺乏針對性[5],為解決這一問題,需要在發動機控制程序中增設一個自適應調整裝置。根據實際狀態,在油門總控開關位置設定刻度參數,以保證其輸出轉速的穩定性。再將恒速程序與主控程序進行搭接關聯,形成更為穩定的控制系統,便于后期對攤鋪機功能的調整。
1.2? ?設計攤鋪機行駛控制邏輯
攤鋪機的行駛控制邏輯,主要是指對攤鋪機的施工作業控制流程的全要素設計與控制。其自動行駛控制方法主要包括:確定攤鋪機行駛的目標路徑,獲取攤鋪機的姿態信息和位置信息:將姿態信息和位置信息與施工作業目標路徑進行比較,從而得到攤鋪機自動航向偏差值和橫向偏差值:根據航向偏差值和橫向偏差值,設定并控制攤鋪機進行相應的施工動作,使攤鋪機能按照所設定的目標路徑自動行駛并作業。
通常情況下,攤鋪機接收到操作指令后會依據既定的流程開展施工作業。但指令是由技術人員設計并下達,在施工過程中難免會存在一定的誤差。而行駛控制邏輯的設計則能夠加強對誤差的控制,形成修正比照程序,從而提高對攤鋪機行駛速度的控制[6]。
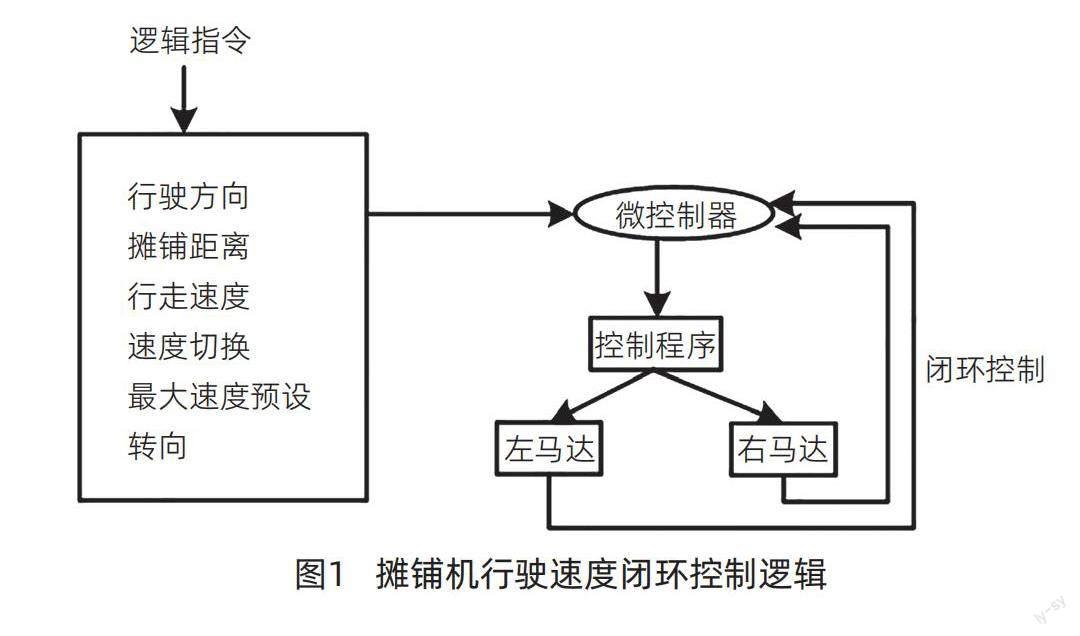
在常規的道路攤鋪施工中,需要提前接通攤鋪機不同位置的電磁閥線圈,輸入操作指令后即形成閉環行駛速度控制邏輯。攤鋪機行駛速度閉環控制邏輯如圖1所示。
根據圖1所示,完成對攤鋪機行駛速度閉環控制邏輯結構的設計,配置設定高擋位和低擋位,使其形成自適應的控制邏輯。其中,攤鋪機行駛控制邏輯的設定,需要與主控程序進行實時關聯,以便當攤鋪機處于閉環狀態時可以開展等距控制,降低行駛過程中發生事故的概率。最后,在主控程序的設定中還要增設PID模塊和PWM模塊,對攤鋪機行駛速度預設不同速度等級,便于實際工程施工作業需求。
1.3? ?構建模糊PID核算行駛速度自適應控制模型
模糊PID算法可以實現對攤鋪機行駛速度誤差率進行精準控制的目的,它通過提前對輸入參數值和具體施工環境開展測算分析,強化了攤鋪機自適應模型的能力。
先設置固定的行駛速度標準,并測算出實際速度控制的隸屬函數,對攤鋪機控制邏輯進行模糊調整并計算出行駛的勻速值,如公式(1)所示:
式中:P(h-1)表示攤鋪機行駛勻速值,α1和α2分別表示預設攤鋪面積和實際攤鋪面積,E表示控制偏差,u表示控制頻率,k表示移位距離。
根據上述測定,完成對攤鋪機行駛勻速值的測算。綜合實際測定值調整攤鋪機行駛速度,在攤鋪機內控程序中增設電液隨動閥,達到在控制速度的同時,也能夠加強對發動機油電控制的目的。
在初始控制模型中增加識別裝置,通過模糊PID算法的測算值設定出允許出現的最大行駛速度差值,如下公式2所示:
式中:△T表示允許出現的最大行駛速度差值,k1和k2分別表示最大行駛速度和最小行駛速度,λ表示輸出量,μ表示控制范圍, 表示單元控制區域,i表示控制次數。
根據上述測算,完成對攤鋪機允許最大行駛速度差值的計算。根據實際施工路況和速度控制需求,綜合行駛速度自適應控制模型的標準,逐步擴大速度控制范圍,實現對模型的進一步優化。模糊PID控制系統結構流程如圖2所示。
1.4? ?區域轉換調整實現速度控制
區域轉換調整,是對攤鋪機進行的一種多方向控制的修正程序。攤鋪機行駛區域轉換調整,主要是對行駛速度控制指令和標準進行參照對比,并自動修正偏差參數,從而確保攤鋪機對路面施工的攤鋪平整度。針對攤鋪機作業行駛區域,完成對控制轉換參數的調整校對,需要劃分成3個階段,具體如表1所示。
根據表1完成對區域階段轉換參數調整的設定。為加強對攤鋪機行駛速度更好控制,通過模糊PID算法,精準測算出攤鋪機行駛速度的具體參數值。區域轉換調整的設定主要是針對施工作業的固定區域,如果存在動態化攤鋪施工需求,則要提前制定具體的攤鋪范圍,以最大程度保證公路路面攤鋪作業的平整度和穩定性。
2? ?實驗分析
為了檢測最終測試結果的真實性,選擇山東省濰坊市某公路的5個路段進行實驗測試。先根據實際測試需求及標準,對最終獲取的測試結果進行比照分析,再對攤鋪路面的基礎測試環境進行搭建。
2.1? ?實驗準備
首先,完成對具體施工路面測試環境的搭建。在5個路段中各自設定對應數量的測定節點,并與主控制程序形成搭接,構建可調節大范圍攤鋪施工作業控制體系。
其次,利用對5個路段中提前所設置每一個節點進行信息采集,再將所測定的參數轉換成數據包,傳輸至攤鋪機的內控系統。
最后,分別在5個路段中各自標出攤鋪機的行駛范圍,同時完成設定對應的攤鋪機行駛單元。為確保最終測定結果的真實性,需要提前設定攤鋪機行駛速度控制指標,具體如表2所示。
根據表2所示,完成對攤鋪機速度控制指標的設定。結合實際測定標準,調整攤鋪機行駛速度的控制程序,再重新設置所需要的行駛速度參數,開始對公路5個路段的具體測驗分析。
2.2? ?實驗過程及結果分析
根據上述搭建的測試環境,應用模糊PID算法對攤鋪機行駛速度實際控制情況進行驗證。利用布設的測定節點,獲取公路路面攤鋪施工數據信息,并將其轉換為數據包,再傳輸至攤鋪機的主控系統之中,制定出初始行駛速度的控制標準。
在第一階段的路面攤鋪施工中,對攤鋪施工后的路面平整度和穩定度進行測定。在第二階段的路面攤鋪施工中,要根據攤鋪施工后的路面下沉狀態,適時調整攤鋪機恒定驅動轉速,對路面凹凸區域進行多方向的來回攤鋪作業,以增強路面平整度。
攤鋪機在恒定驅動功率環境下,綜合模糊PID算法測算出行駛速度控制的精差率,如公式3所示:
式中:M表示行駛速度控制精差率, 表示控制范圍,
表示控制單元,Y表示控制次數,τ表示預估偏差。
綜合上述測算完成對測試結果分析。測試結果對比如圖3所示。對5個路段的測試結果進行測定分析,分析結果證實,攤鋪機行駛速度控制精差率得到了較好控制,其誤差控制率下降至30%以下,對攤鋪機行駛速度控制效果明顯。
3? ?結束語
當前混凝土攤鋪機行駛速度控制模型多采用單向控制模式,如果操作控制偏差較大,容易導致靜差率增加,既對機器造成了損壞,也大幅降低了對路面混凝土的攤鋪質量。本文基于模糊PID算法,對公路瀝青混凝土攤鋪機行駛速度的控制效果進行了驗證分析。
與傳統的行駛速度控制方法對比,融合了模糊PID算法的攤鋪機行駛速度控制模式更為精準穩定,能夠在復雜的公路路面施工環境中,更好地控制攤鋪機的行駛速度誤差,對公路路面的攤鋪成型起到了關鍵作用。基于模糊PID算法的攤鋪機行駛速度控制技術,有利于提高路面攤鋪平整度,保障路面施工質量。
參考文獻
[1] 高海波,劉欣超,王彤.基于3D機械控制瀝青路面智能攤鋪施工技術應用研究[J].江蘇建筑,2022(S1):52-55.
[2] 楊劉虎.3D數字化攤鋪機控制系統在高速公路建設中的應用[J].交通世界,2022(22):105-107.
[3] 王志剛.解析高速公路施工中攤鋪機的應用[J].四川建材,2021,47(11):116-117.
[4] 姚艷鵬,王四虎,陳貞紅.大型攤鋪機水穩全幅施工技術[J].中國建材科技,2021,30(5):179-180+54.
[5] 黃忠.高速公路路緣石施工中滑模攤鋪機的應用研究[J].工程建設與設計,2021(18):148-150.
[6] 索偉.攤鋪機在路面施工中對平整度的影響及控制措施[J].設備管理與維修,2021(2):149-151.
[7] 李悅.基于模糊矩陣的數據關聯算法應用綜述[J].數字技術與應用,2020,38(10):92-94.
