基于復(fù)合控制的永磁同步電機滑模抗擾性研究
2023-12-08 02:39:54葛凌楓柏受軍高寶林
安徽工程大學(xué)學(xué)報 2023年4期
葛凌楓,柏受軍*,江 明,高寶林
(1.高端裝備先進感知與智能控制教育部重點實驗室,安徽 蕪湖 241000;2.電氣傳動與控制安徽省重點實驗室,安徽 蕪湖 241000)
永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)因為具有結(jié)構(gòu)簡單、效率高、安全性好等諸多優(yōu)勢,被廣泛應(yīng)用于新能源汽車、機器臂、數(shù)控機床等工業(yè)領(lǐng)域[1-2]。目前,在很多工業(yè)應(yīng)用場景中,對于永磁同步電機控制系統(tǒng),矢量控制是控制電機速度的常用技術(shù)。基于矢量控制的比例積分(PI)控制因其控制簡單,被廣泛應(yīng)用于永磁同步電機控制[3]。但是,PMSM 伺服控制系統(tǒng)本質(zhì)上是一個非線性系統(tǒng),電機在不同的工作條件下容易受到干擾以及外部其他因素的影響,如內(nèi)部參數(shù)受到溫度、摩擦力和外部負載擾動等的影響[4]。雖然傳統(tǒng)的PI線性控制方法具有控制方法簡單、調(diào)節(jié)方便等優(yōu)點,但是不能快速限制參數(shù)變化和外部干擾等產(chǎn)生的影響[5]。因此,需要采用新的方法來克服傳統(tǒng)PI控制器的問題并保持電機驅(qū)動時的高動態(tài)性能。
近年來,許多學(xué)者提出了很多新的控制策略來提高永磁同步電機系統(tǒng)的控制性能,如神經(jīng)網(wǎng)絡(luò)[6]、自抗擾控制[7]、模糊控制[8]、滑模控制[9-11]等算法。其中,對于外界擾動以及電機參數(shù)帶來的影響,滑模控制有著較強的魯棒性,使其逐漸成為學(xué)者們的一大研究熱點。文獻[12-13]都提出了一種變速趨近律的方法,將狀態(tài)變量結(jié)合到趨近速度上,使系統(tǒng)能穩(wěn)定于原點,且在趨于穩(wěn)定狀態(tài)后能有較好的穩(wěn)定表現(xiàn)。文獻[14]通過引入雙曲正切函數(shù)設(shè)計提出了另一個新型可變的邊界層飽和函數(shù),其所設(shè)計出的一種新的變量函數(shù)可以取代傳統(tǒng)的符號函數(shù),但是,同時也增加了邊界層參數(shù)的選取,參數(shù)的過大或過小都會影響實驗的準確性。文獻[15]提出了一種新型趨近律,并對擴張狀態(tài)觀測器的負載力矩估計進行了改進,使滑模振動得到有效改善,力矩估計精度得到提高。文獻[16]提出了一種控制策略,該控制策略使用了非奇異快速終端滑模面,并將所設(shè)計的控制器和擾動觀測器結(jié)合在一起,在減弱電機轉(zhuǎn)速抖振的同時,使系統(tǒng)迅速收斂,其抗干擾能力得到較大的提升,但是,過多的參數(shù)調(diào)節(jié)增加了實驗過程中的復(fù)雜度。文獻[17]給出的減少系統(tǒng)抖振的方法通過改進指數(shù)趨近律的滑模觀測器來實現(xiàn),此外,還構(gòu)建了自適應(yīng)速度觀測器,雖然實現(xiàn)了系統(tǒng)狀態(tài)的自適應(yīng)控制,但是,考慮到實際情況,存在實現(xiàn)困難的問題。
基于以上研究,為了提高PMSM 的調(diào)速系統(tǒng)的性能,本文采用改進指數(shù)趨近律結(jié)合負載擾動觀測器的復(fù)合控制方法。在傳統(tǒng)指數(shù)趨近律的基礎(chǔ)上對其做出相應(yīng)的改進,使其能夠在系統(tǒng)遠離滑模面時,確保改進趨近律能夠以更快的趨近速率到達滑模面。考慮負載擾動對電機轉(zhuǎn)速產(chǎn)生的影響,利用滑模控制思想設(shè)計擾動觀測器,所設(shè)計的擾動觀測器是以增量編碼器和霍爾傳感器計算出來的轉(zhuǎn)速和電流作為輸入,同時將輸出的結(jié)果以負載電流的形式補償?shù)剿俣瓤刂破鞯妮敵鲭娏髦抵小.斬撦d產(chǎn)生變化時,通過調(diào)節(jié)控制器的電流大小來減小突加負載時對電機轉(zhuǎn)速的影響。
1 永磁同步電機數(shù)學(xué)模型
為了研究簡便,本文使用表貼式永磁同步電機(SPMSM)為研究對象。永磁同步電機在d-q坐標系下的數(shù)學(xué)模型為:
式中,ud,uq分別為d,q軸的電壓;id,iq分別為d,q軸的電流;R為定子電阻;Ld,Lq分別為d,q軸的電感;ωm為轉(zhuǎn)子電角速度;Te為電磁轉(zhuǎn)矩;P為極對數(shù);ψf為永磁體磁鏈。
因為表貼式PMSM 有Ld=Lq=L,所以電磁轉(zhuǎn)矩方程和機械運動方程為:
式中,J為轉(zhuǎn)動慣量;B為粘滯摩擦系數(shù);TL為負載轉(zhuǎn)矩。
2 滑模控制器的設(shè)計
滑模控制實際上是一種變結(jié)構(gòu)控制[18],它是由兩部分組成的,分別是滑動軌跡和控制律。控制律的作用是確保系統(tǒng)的狀態(tài)軌跡能夠到達設(shè)計好的滑動軌跡并沿著其收斂。當系統(tǒng)遠離所設(shè)計的滑動軌跡時,通過選擇合適的控制律,來保證滑模控制系統(tǒng)的狀態(tài)軌跡以更快的速率到達滑動軌跡上。當系統(tǒng)到達滑動軌跡時,期望到達速度降為零,以確保滑動狀態(tài)能夠保持在滑動軌跡上。由于滑動的慣性使得滑動狀態(tài)不容易在滑動軌跡上保持零速度,使得滑動狀態(tài)在滑動軌跡的兩側(cè)移動。系統(tǒng)的一個滑動軌跡如圖1所示。

圖1 滑模運動軌跡
2.1 傳統(tǒng)滑模控制器設(shè)計
組合改進趨近律和滑模擾動觀測器的復(fù)合控制方法如圖2所示。PMSM 的實時觀測擾動信號通過增益K轉(zhuǎn)變成擾動電流的形式前饋至速度控制器中,d軸初始電流設(shè)置為0,q軸電流由速度控制的輸出電流和負載擾動觀測器輸出的電流來確定。下面將依次介紹控制器和擾動觀測器的設(shè)計。首先,傳統(tǒng)滑模速度控制器的設(shè)計如下。

圖2 PMSM 調(diào)速系統(tǒng)結(jié)構(gòu)框圖
永磁同步電機的狀態(tài)變量定義為:
式中,ω*為永磁同步電機給定轉(zhuǎn)速,ω為電機實際轉(zhuǎn)速。
在傳統(tǒng)控制器的設(shè)計過程中,滑模面如式(5)所示:
指數(shù)趨近律是由高為炳[18]首次提出和設(shè)計的,如式(6)所示:
式中,s為滑模面;sgn(s)為切換函數(shù);ε、q分別為趨近速率和趨近系數(shù)。
2.2 改進指數(shù)趨近律控制器的設(shè)計
傳統(tǒng)滑模控制器的設(shè)計過程中,趨近速率的減小會削弱系統(tǒng)的抖振問題,但同時也會使系統(tǒng)的收斂速度減慢,因此收斂速度與抖振之間很難達到平衡。為了解決上述問題,提出了一種改進指數(shù)趨近律:
其中,
式中,α>0,0<β<1。分析該式,當s很大時,相應(yīng)系統(tǒng)運行狀態(tài)的軌跡遠離滑模面,exp(-α|s|)趨近于0,f(s)趨近于此時εf(s)>ε,系統(tǒng)會以更快的速率到達滑模面。
為了驗證改進趨近律是以一個更快的速率到達滑模面,分析了改進趨近律的指數(shù)項的趨近速度。結(jié)合式(8)、(9),改進指數(shù)趨近律的指數(shù)項可表示為:
對式(10)兩邊同時求積分,化簡得:
傳統(tǒng)指數(shù)趨近律的趨近時間為:
將式(11)、(12)作差法得:
從式(13)可以看出,由于exp(-α|s(0)|)-1<0,所以△t<0,可知改進后的指數(shù)趨近律將在更短的時間內(nèi)到達滑模面。
證明首先選取Lyapunov函數(shù):
從式(15)中可以看出,-ssgn(s)<0,且β+(1-β)exp(-α|s|)>0,因此<0。證明了改進的趨近律滿足Lyapunov穩(wěn)定性判據(jù),系統(tǒng)是漸進的、穩(wěn)定的。
結(jié)合式(7),改進趨近律方法設(shè)計的控制器在q軸的輸出為:
在電機的實際運行中會存在參數(shù)懾動,特別是負載擾動會對系統(tǒng)產(chǎn)生很大的影響。此外考慮粘滯摩擦系數(shù)對電機的影響,重新定義PMSM 控制系統(tǒng)的狀態(tài)變量為:
式中,ωref為永磁同步電機給定轉(zhuǎn)速;ωm為永磁同步電機實際轉(zhuǎn)速。
對式(17)求導(dǎo),帶入式(2)、(3)中得:
重新定義滑模面,采用積分滑模面,滑模面s定義為:
式中,c1為滑模面系數(shù),且c1>0。
對式(19)求導(dǎo)得:
結(jié)合式(8)和式(20)得到速度環(huán)輸出電流為:
式中,i*q為控制器輸出電流。
3 擾動觀測器的設(shè)計及穩(wěn)定性分析
3.1 滑模擾動觀測器的設(shè)計
為了提高永磁同步電機驅(qū)動器的抗干擾性能,重新改寫了電流輸出方程,然后將估計的負載擾動轉(zhuǎn)化成電流前饋信號補償?shù)剿俣瓤刂破鞯妮敵鯷19]。
在PMSM 系統(tǒng)中,由于負載轉(zhuǎn)矩與其他信號相比只是一個變化很慢的過程,因此一階導(dǎo)數(shù)為0。所以,擾動的一階導(dǎo)數(shù)也是0,即
將式(21)改寫為:
將ωm和d作為觀測對象,由式(24)可得觀測器方程為:
式中,θobs=gsgn(ew);g為滑模增益;λ為擾動觀測器增益。
將式(25)與式(24)相減,可得擾動觀測器的誤差方程為:
式中,eω=-ωm為速度觀測誤差;eT=-d為擾動觀測誤差。
在上式中,符號函數(shù)也被稱為開關(guān)函數(shù),由于符號函數(shù)存在著不連續(xù)性特性,系統(tǒng)在運行過程中容易產(chǎn)生抖振。本文使用連續(xù)函數(shù)sigmoid(x)函數(shù)來替代符號函數(shù)。sigmoid(x)函數(shù)的基本表達式為:
3.2 穩(wěn)定性分析
在本文中,將eω作為滑模面,根據(jù)滑模控制理論,選擇Lyapunov函數(shù)由Lyapunov穩(wěn)定性定理可知時,系統(tǒng)才能達到穩(wěn)定。即
式中,J>0,B>0,化簡之后,滑模增益g的取值范圍為:
當滑模負載擾動觀測器進入滑模面時,此時滿足速度觀測誤差eω==0,式(26)可簡化為:
式(30)化簡為:
式中,k1是一個常數(shù)。負載擾動的估計誤差隨著時間的增加而減小,最后到達0。綜上所述,當選擇增益參數(shù)合適時,永磁同步電機系統(tǒng)就是穩(wěn)定的。本文所設(shè)計的負載轉(zhuǎn)矩觀測器結(jié)構(gòu)框圖如圖3所示。

圖3 負載轉(zhuǎn)矩觀測器結(jié)構(gòu)框圖
4 實驗結(jié)果與分析
4.1 仿真結(jié)果及分析
在M ATLAB/Simulin k中搭建永磁同步電機模型,d軸電流的初始值設(shè)置為0。其中電流環(huán)采用PI控制算法,參數(shù)為[kp,ki]=[3.5,0.04],速度環(huán)使用本文中所提出的改進算法,q軸反饋電流以及實際轉(zhuǎn)速作為擾動觀測器的輸入,輸出為擾動觀測值,并將觀測值轉(zhuǎn)換成轉(zhuǎn)矩電流補償?shù)剿俣瓤刂破髦小F渲?擾動觀測器的參數(shù)設(shè)置為g=-1.2,λ=-0.75,K=0.6,a=2。傳統(tǒng)滑模控制器滑模面系數(shù)c=60,其中q=200,ε=15;改進趨近率參數(shù)設(shè)置為c=5,ε=15,k=200,α=4,β=0.45。
仿真中,電機的初始轉(zhuǎn)速設(shè)置為800 r/min,電機在無負載狀態(tài)下運行,仿真結(jié)果如圖4所示。從圖4中的電機仿真速度曲線中得出,采用新型趨近律控制方法能夠有效降低系統(tǒng)產(chǎn)生的超調(diào)量,大幅度減小動態(tài)響應(yīng)時間。

圖4 無負載轉(zhuǎn)速仿真波形圖
為了驗證抗干擾能力,電機在0.2 s之前以空載轉(zhuǎn)矩啟動,在0.2 s時給電機增加一個4 N·m 的負載轉(zhuǎn)矩,在0.4 s時,將負載轉(zhuǎn)矩減少為2 N·m。仿真如圖5所示。從圖5中可以看出改進的滑模控制器加擾動觀測器在增加負載的過程中,具有最小速度損失,且很快就能達到穩(wěn)定狀態(tài)。同樣的,在減小負載的過程中,很快也達到穩(wěn)定狀態(tài)。

圖5 負載變化轉(zhuǎn)速仿真波形圖
4.2 實驗結(jié)果及分析
為了驗證所設(shè)計的控制器的性能,將給出的算法在永磁同步電機驅(qū)動控制實驗平臺上進行測試,實驗平臺如圖6所示。實驗平臺包含以TMS320F28335作為主要控制芯片的驅(qū)動控制試驗箱,cSPACE 上位機,永磁同步電機和直流有刷電機。此外,還包括一些電機連接線和信號線等。永磁同步電機作為研究對象,直流無刷電機提供可變負載,將試驗箱的仿真線接口與電腦相連,cSPACE上位機提供參數(shù)設(shè)置,以及電機實時運行數(shù)據(jù)的可視化。
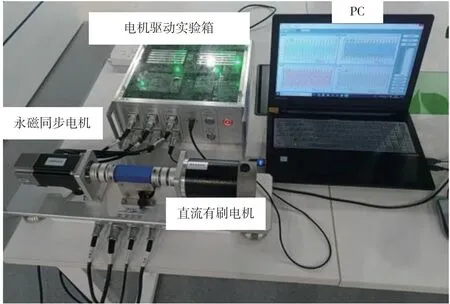
圖6 永磁同步電機驅(qū)動控制實驗平臺
實驗中,PI控制器的參數(shù)設(shè)置為kp=0.2,ki=0.02,傳統(tǒng)滑模控制中的指數(shù)趨近律參數(shù)設(shè)置為q=200,ε=15,滑模面系數(shù)c=15;改進趨近率參數(shù)設(shè)置為c=15,ε=15,k=200,α=4,β=0.45。擾動觀測器的參數(shù)設(shè)置為g=-1.2,λ=-0.75,K=0.6,a=2。
實驗中電機參數(shù)如表1所示。初始狀態(tài)下,上位機負載項參數(shù)設(shè)置為0,即給直流有刷電機提供0 A的電流,永磁同步電機處于空載轉(zhuǎn)動狀態(tài),電機的初始轉(zhuǎn)速設(shè)置成1 000 r/min,電機的采樣時間為0.001 s。讓永磁同步電機帶動直流有刷電機轉(zhuǎn)動,在上位機上設(shè)置好參數(shù),啟動電機,保存數(shù)據(jù),將保存好的數(shù)據(jù)利用MATLAB進行處理,生成圖片,得出結(jié)果。

表1 PMSM 參數(shù)
PMSM 啟動時刻速度響應(yīng)曲線如圖7所示。從圖7中以看出,傳統(tǒng)滑模控制下電機啟動瞬間的超調(diào)量有199 r/min,而使用改進趨近率的控制方法,電機啟動瞬間的超調(diào)量只有152 r/min。從電機的響應(yīng)時間來看,電機速度從0 r/min到穩(wěn)定在1 000 r/min,采用傳統(tǒng)滑模方法的時間為363 ms,而使用改進趨近律的滑模控制器方法的響應(yīng)時間為262 ms。由此可知,改進后的控制方法達到初始轉(zhuǎn)速比傳統(tǒng)滑模方法要快。

圖7 PMSM 啟動時刻速度響應(yīng)
當給直流有刷電機提供不同的電流時,會產(chǎn)生不同的扭矩大小。分別給直流有刷電機提供1 A 和2 A的電流,從上位機上觀察永磁同步電機的轉(zhuǎn)速曲線變化。給直流有刷電機提供1 A 的情況如圖8、9所示。此時從上位機上觀察的負載轉(zhuǎn)矩約為100 m N·m。由圖8可以看出,電機在突加負載的情況下,傳統(tǒng)滑模控制方法中的速度波動最大幅值達到了52 r/min,而加了擾動補償后速度的最大幅值為34 r/min。從轉(zhuǎn)速的響應(yīng)時間來看,采用擾動補償?shù)姆椒憫?yīng)時間減少了,約為120 ms。將負載突然卸載情況下的速度曲線變化圖如圖9所示。從圖9中的轉(zhuǎn)速幅值以及響應(yīng)時間來看,采用復(fù)合控制的方法比傳統(tǒng)滑模控制方法分別減少了13 r/min和100 ms。
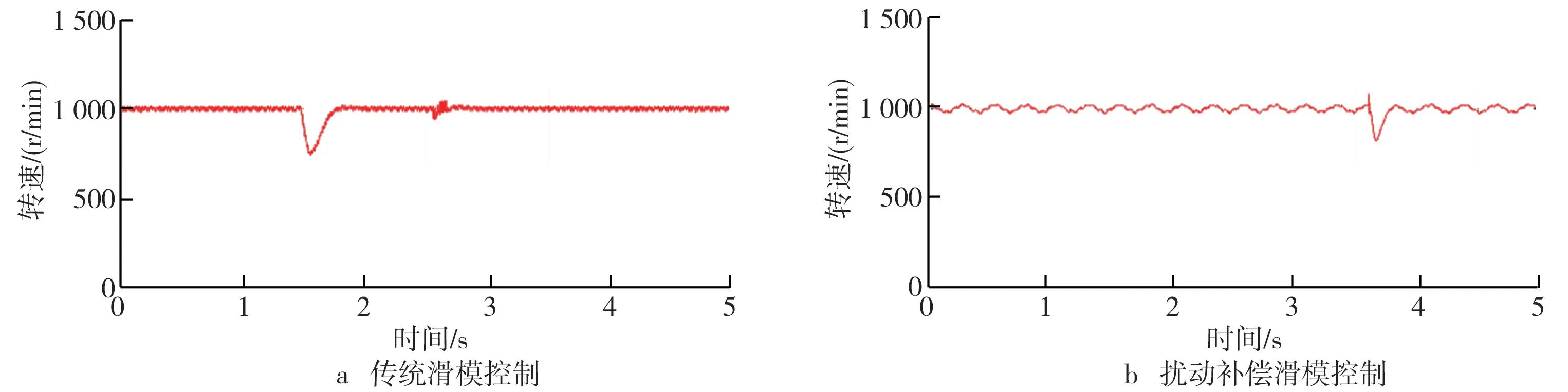
圖8 PMSM 加載時刻速度響應(yīng)(1 A 電流)
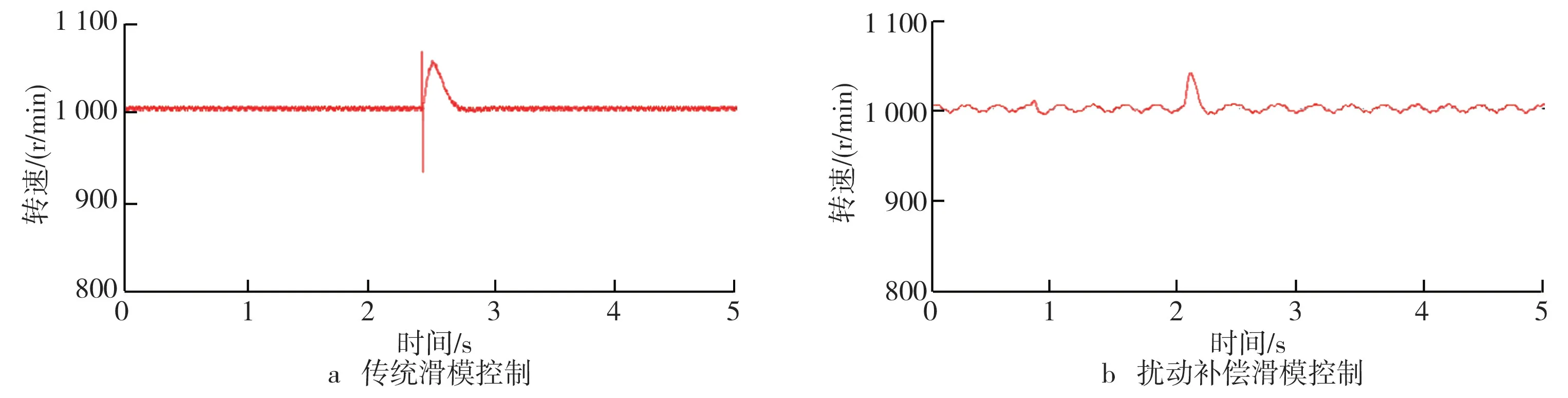
圖9 PMSM 卸載時刻速度響應(yīng)(1 A 電流)
給直流有刷電機提供2 A 電流時的轉(zhuǎn)速曲線變化圖如圖10、11所示。上位機上觀察的負載轉(zhuǎn)矩大小約為200 m N·m。分析實驗數(shù)據(jù),采用復(fù)合控制方法的轉(zhuǎn)速幅值和響應(yīng)時間分別減少了30 r/min和80 ms。同理,在突然卸載的情況下,永磁同步電機的轉(zhuǎn)速幅值和響應(yīng)時間分別減少了29 r/min 和160 ms。通過觀察不同負載擾動條件下的對比實驗,證明了本文中所提出的控制策略在負載突變情況下,電機的調(diào)速系統(tǒng)存在一定的改善,提高了永磁同步電機的運行性能。

圖10 PMSM 加載時刻速度響應(yīng)(2 A 電流)

圖11 PMSM 卸載時刻速度響應(yīng)(2 A 電流)
5 結(jié)論
本文針對使用基于指數(shù)趨近律滑模控制出現(xiàn)超調(diào)大及響應(yīng)時間慢的問題,提出了一種改進指數(shù)趨近律和擾動觀測器組成的復(fù)合控制策略。從仿真的結(jié)果來看,所設(shè)計的速度控制器降低了啟動瞬間的速度超調(diào)量,同時改善了速度響應(yīng)時間。當給該系統(tǒng)增加外部負載時,所提出的復(fù)合控制策略能夠有效減少負載產(chǎn)生的影響,確保了系統(tǒng)在受到干擾時能夠很快按照期望的轉(zhuǎn)速運行。最后的實驗也驗證了所提出的復(fù)合控制在不同負載情況下的可行性,證明了該系統(tǒng)的抗擾性能力。
