壓鑄機鎖模力測量新技術及其驗證
2023-12-09 08:01:40蔡加軍蔡恒志徐文靜張建軍
中國鑄造裝備與技術 2023年6期
關鍵詞:測量
蔡加軍,蔡恒志,徐文靜,盧 軍,張建軍,4,張 陽
(1.深圳中研塑力科技有限公司,廣東 深圳 518000;2.深圳領威科技有限公司,廣東 深圳 518000;3.濟南鑄鍛所檢驗檢測科技有限公司,山東 濟南 250399;4.國家鑄造鍛壓機械質量檢驗檢測中心,山東 濟南 250399;5.合肥工業(yè)大學儀器科學與光電工程學院,安徽 合肥 230000)
近期新能源汽車市場的發(fā)展導致了超大一體零件設計技術的普及應用。與常規(guī)使用的小型零件相比,超大型結構零件功能和設計更復雜,產(chǎn)生了厚度相差太大和流動融液走動不對稱的問題,這些對于鎖模力提出了更高的要求。
鎖模力是否達到預定值以及四根哥林柱是否受力均勻是評價壓鑄機的重要指標之一,哥林柱的結構如圖1 所示,其中圖1a 表示的是未受力時的哥林柱,圖1b 表示的是哥林柱受力后的位移云圖。如果鎖模力設置過小,那么制品就會產(chǎn)生飛邊的問題,反之如果鎖模力設置過大,會影響模具排氣,增加能耗,縮短模具和設備的使用壽命,不符合經(jīng)濟性的要求[1]。而只有受力均勻分布的壓鑄機才能確保制品品質并能對模具和壓鑄機本身起到保護作用,延長模具和壓鑄機的壽命。此外,四根哥林柱是否平行也影響著機器本身的壽命和壓鑄件的質量。如果模板或者模具不平行,那么會導致每根哥林柱受力相差較大,進而發(fā)生斷裂,導致生產(chǎn)無法繼續(xù)進行下去。因此生產(chǎn)中需要時刻控制四根哥林柱的受力大小在可接受范圍內(nèi)。通常的做法是在壓鑄機上安裝測量裝置,傳統(tǒng)的測量方式是用粘貼式應變片[2]來測量哥林柱的應變,然后計算每根的受力大小,最后將它們加起來得到鎖模力大小。但是粘貼工作很麻煩,比較耗時[3],膠水對于哥林柱來說本身就是一種破壞,會影響測量的精確度,此外應變片只能使用一次,并且在機器快速運動時容易脫落,因此該方法在精度和成本上都存在很大問題,不適合長期使用。現(xiàn)在一種新的鎖模力測量技術的出現(xiàn)解決了這些問題。
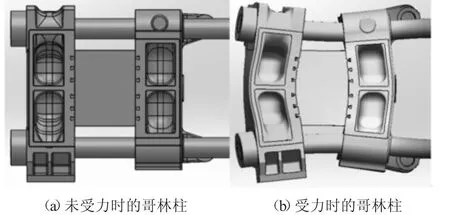
圖1 哥林柱結構
1 新型鎖模力測量裝置
深圳中研塑力科技有限公司(以下簡稱中研塑力)研發(fā)了一款新的應變傳感器,不但可以用于注塑機上,也可以用于壓鑄機上。這款傳感器適用于測量固定或移動機器部件上的動態(tài)和準靜態(tài)力,和傳統(tǒng)應變片測量原理一樣,也是先測出機器或結構表面的力比例應變,從而間接得到鎖模力。高靈敏度和加速度補償設計使得它可以對快速運行的機械(例如壓力機、自動裝配機)進行過程監(jiān)控,并且安裝十分方便,僅用一顆M6 螺釘固定,不會產(chǎn)生脫落的風險,其結構如圖2 所示。
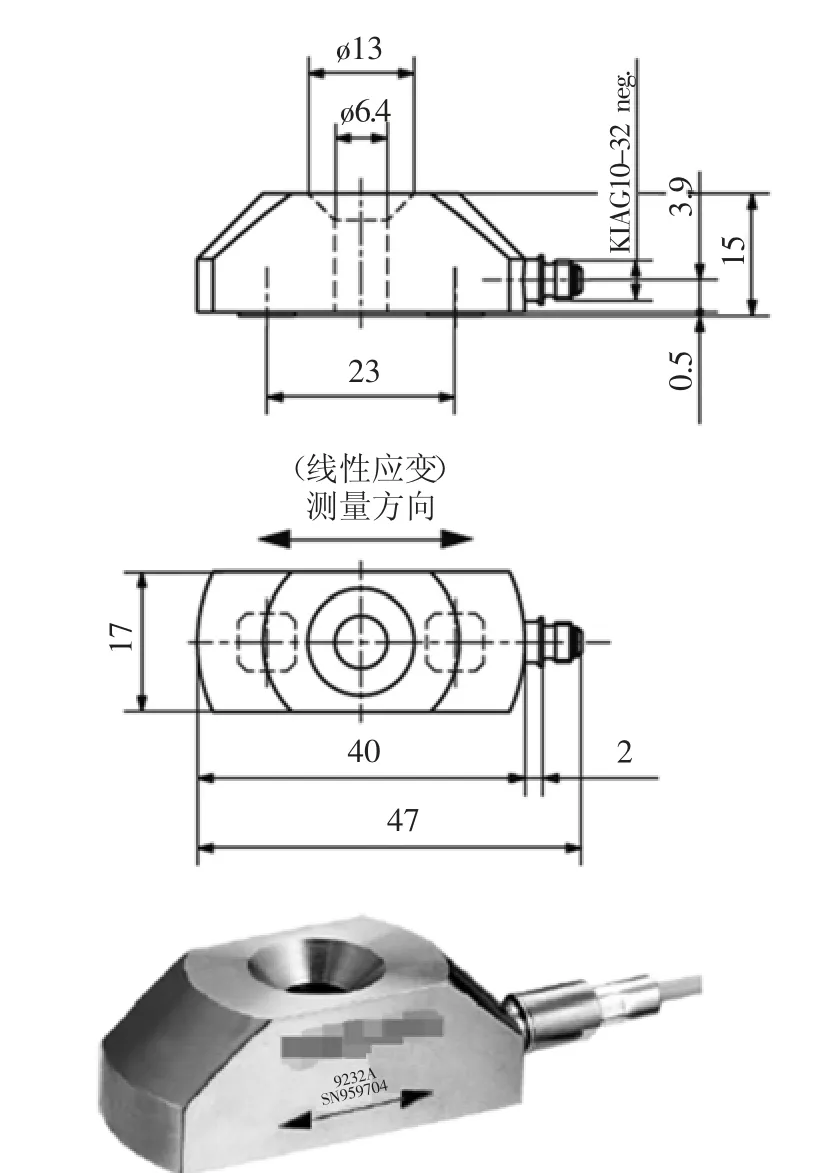
圖2 應變傳感器結構
安裝時,需要先將傳感器與機器結構對齊,然后在測量點加工M6 螺紋,如圖3 所示。靠近傳感器的電纜應盡可能不受推力或拉力的影響。 電纜應夾緊到位,以避免應變或振動傳輸。在安裝好以后,需要根據(jù)實際情況進行校準。與其他的線應變計技術相比,其特殊優(yōu)勢在于靈敏度高、抗過載能力強以及即使在負載波動的情況下也幾乎可以無限使用。另外,由于依靠螺釘進行固定,即使在有連續(xù)沖擊載荷的在線生產(chǎn)監(jiān)測環(huán)境下,該傳感器也能夠很好地進行工作。
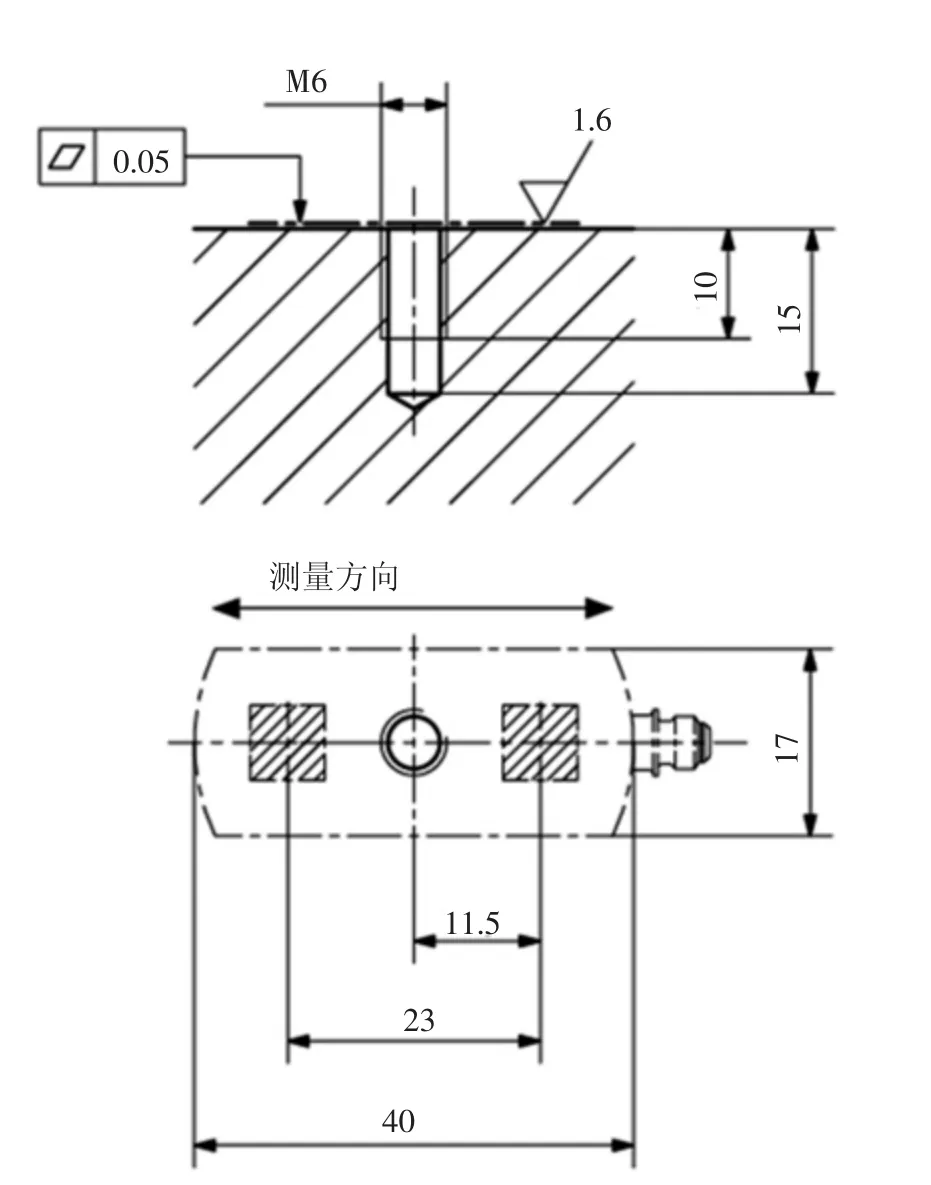
圖3 傳感器的安裝
2 哥林柱及鎖模力的測量原理
測量應變的方法很多,但原理基本都是通過鎖模時哥林柱所受到的載荷發(fā)生形變量來進行間接測量的[4]。鎖模力的計算公式如式1 所示。
式中:F鎖為鎖模力, 單位kN;Fi為第i 根拉桿上的軸向力, 單位kN;A 為拉桿測試處截面積, 單位cm2;E 為拉桿材料的彈性模量, 單位kN/cm2;μ為拉桿材料的泊松比,一般取值為0.28;εi為第i根拉桿的應變儀讀數(shù)的應變量;n 為拉桿的數(shù)量。
3 實驗驗證有效性
選擇9232A 型應變傳感器進行實驗,來驗證傳感器的準確性。深圳力勁公司提供了實驗環(huán)境和實際生產(chǎn)所用的標準鎖模力傳感器,目的是為了將中研塑力研發(fā)的傳感器與其進行對比,看其測量的鎖模力值是否滿足線性關系。
在實驗中,以2800 t 壓鑄機作為實驗對象,并分別在它的動模板和曲柄位置安裝了應變傳感器,在它的四根哥林柱上安裝了標準鎖模力傳感器,如圖4 所示。

圖4 傳感器的安裝
實驗開始時,先對中研塑力的應變傳感器進行校零處理,然后分別在兩種安裝位置下各做了十一組實驗,并記錄每一次用標準鎖模力傳感器得到的總鎖模力大小和用中研塑力傳感器檢測到的第一根哥林柱的鎖模力,結果如表1 和表2 所示。
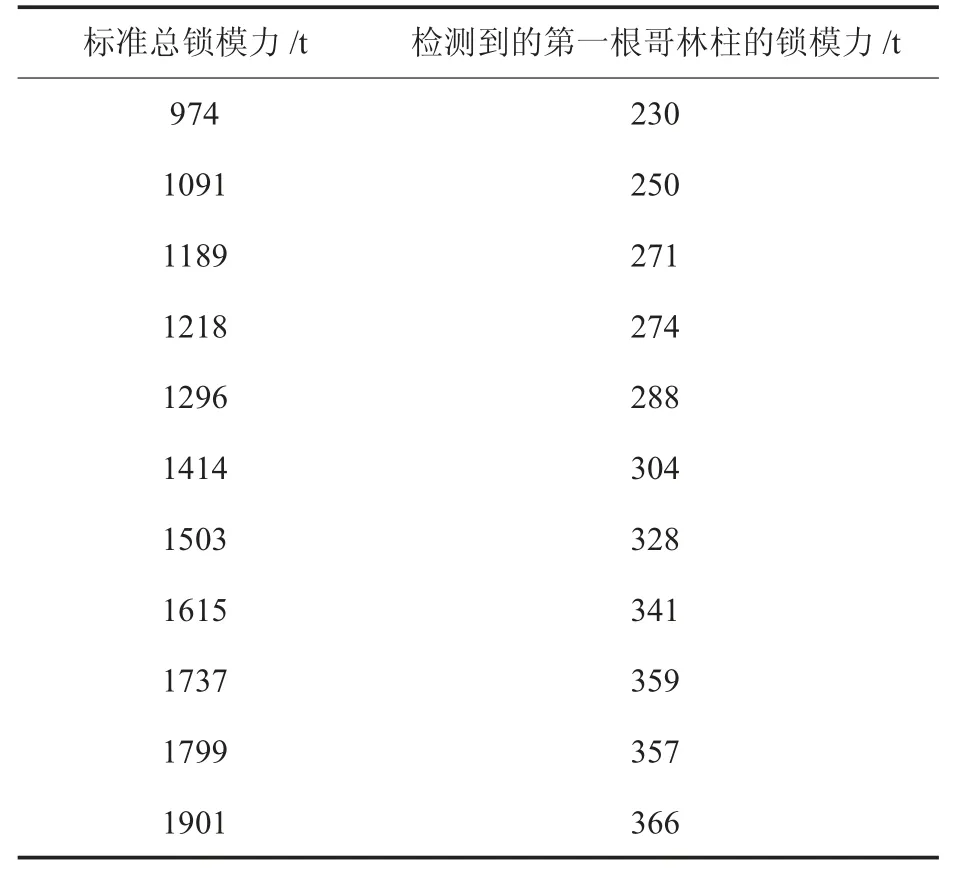
表1 安裝在曲柄上的實驗
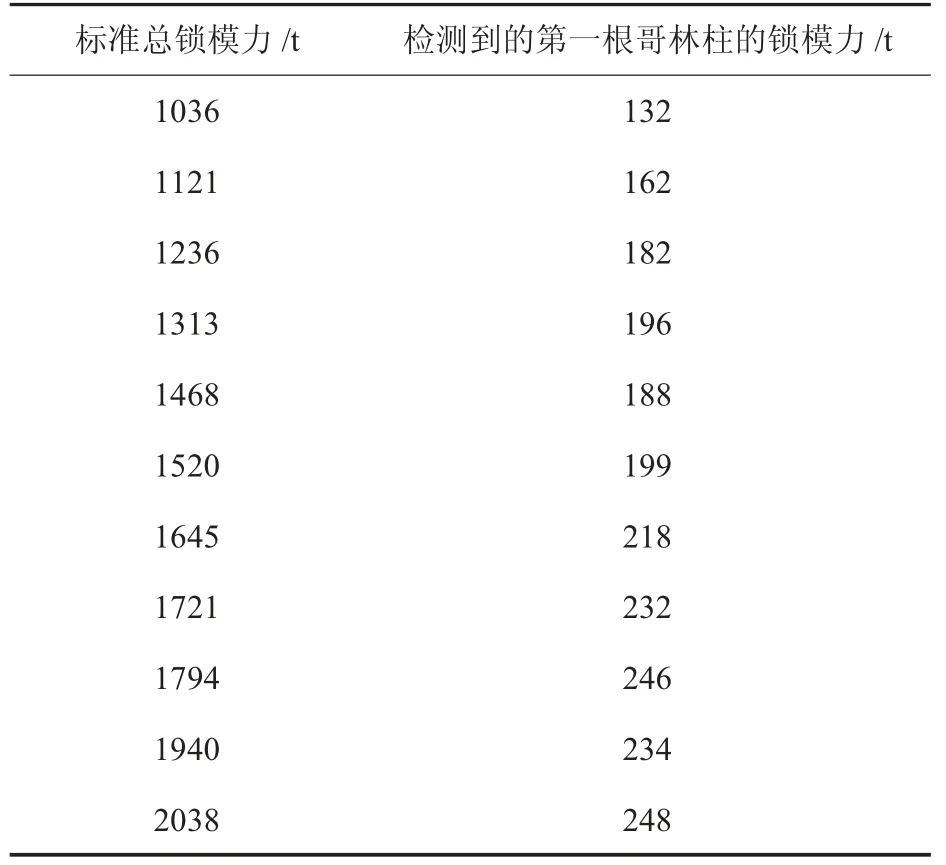
表2 安裝在動模板上的實驗
理想情況下,每根哥林柱的受力大小應該一樣,而且和總的鎖模力大小呈線性關系。實際應用中,由于可以調(diào)節(jié)應變力和電壓之間的比例,所以不能將哥林柱受力大小應該是總鎖模力的四分之一這個約束作為傳感器檢測是否準確的衡量標準,而應該觀察它們之間是否呈現(xiàn)線性關系。因此采用最小二乘回歸來對數(shù)據(jù)進行擬合,以此判斷中研塑力傳感器的準確性。
在python 里面對數(shù)據(jù)進行處理并繪制圖像,得到的結果如圖5 和圖6 所示。
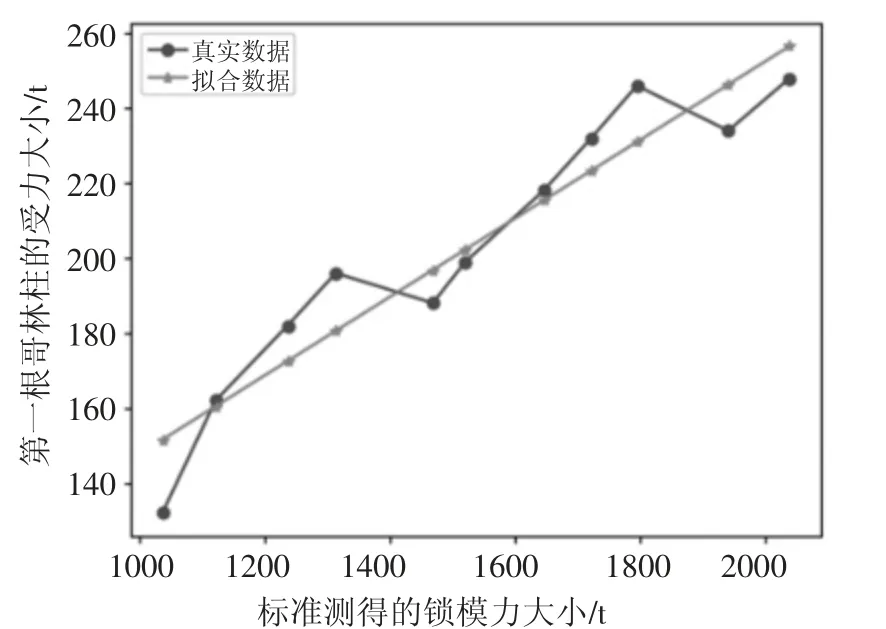
圖6 安裝在動模板上
從圖中不難看出,安裝在曲柄上的傳感器得到的第一根哥林柱的鎖模力與標準總鎖模力明顯存在很強的線性關系,而安裝在動模板上的傳感器得到的第一根哥林柱的鎖模力與標準總鎖模力也具有一定的線性相關性。為了更有利說明這一點,我們計算了最小二乘回歸方法的均方差MSE和相關性系數(shù)R,所得結果如表3 所示。

表3 均方差和相關性系數(shù)
從表中可以看出,安裝在曲柄上的實驗方案所得到的均方差遠小于安裝在動模板上的試驗方案所得到的均方差,而且前者的相關性系數(shù)更大,說明安裝在曲柄上的方案更為可取,可能的原因是由于動模板距離哥林柱太遠,容易受到其他力的干擾,所以會造成測量上的更大誤差,在實際生產(chǎn)中應首先考慮安裝在曲柄上的方案。
此外,不難發(fā)現(xiàn),兩種方案中擬合的直線都沒有經(jīng)過原點,可能是測量的組數(shù)太少以及在加工過程中機器的沖擊對于傳感器的測量有一定影響。
4 結論
中研塑力研發(fā)的新鎖模力測量應變傳感器有如下優(yōu)點:
(1)相比于傳統(tǒng)粘貼式應變片,安裝更加穩(wěn)固,而且可以重復使用。
(2)有方便的接口,可以直接從操作面板中讀取鎖模力值,操作性更強。
另外,需要注意安裝位置,應該考慮裝在離哥林柱較近的位置,如曲柄上。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00