基于模型預測的MMC容錯控制策略研究
2023-12-10 19:29:18汪健余瑜楊文康
湖北工業大學學報 2023年2期
汪健 余瑜 楊文康
[收稿日期]20211029
[第一作者]汪健(1995-),男,湖北黃岡人,湖北工業大學碩士研究生,研究方向為電力電子技術
[文章編號]1003-4684(2023)02-0017-05
[摘要]子模塊故障是模塊化多電平換流器主要的故障類型,提出了一種模型預測容錯控制策略,無需設置冗余子模塊,故障后只需切除故障子模塊,通過基于模型預測控制的軟件容錯控制方法,在實現MMC輸出相電流跟蹤和子模塊均壓的同時,通過調整故障橋臂補償電壓來實現三相環流的抑制,仿真實驗證明了所提模型預測容錯控制策略的有效性。
[關鍵詞]模型預測控制; 子模塊故障; 容錯控制; 環流抑制
[中圖分類號]TM461? [文獻標識碼]A
模塊化多電平換流器因其模塊化設計,在高壓柔性直流輸電領域有廣泛的應用[1],但由于其特殊的拓撲結構,實際工程中上百個子模塊串聯連接,一旦有子模塊發生故障將會對MMC(modular multilevel converter )的正常運行造成影響[2-4],實際工程中往往會配備熱備用子模塊,熱備用子模塊即正常運行時參與系統的投切,其根據故障時切除子模塊數量的不同可分為橋臂對稱運行和橋臂不對稱運行。橋臂對稱運行即當橋臂中有子模塊發生故障時,不僅切除故障橋臂的故障子模塊,并且切除所有橋臂對應數量的正常運行的子模塊,這種方式可以保證橋臂對稱運行,但是切除了其他橋臂正常運行的子模塊,造成了硬件資源的浪費并且降低了MMC的輸出功率和電壓等級[5]。橋臂非對稱運行方式只切除故障相的故障子模塊,這種方式能夠保證子模塊的利用率,但是由于故障相與非故障相子模塊投切數量不一樣,會使橋臂處于不對稱運行狀態,造成負序二倍頻環流增大,輸出相電流畸變等問題[6]。文獻[7]提出了一種基于PI控制的載波重構的容錯控制策略,故障前后需要對載波進行重新分配,控制過程比較復雜;文獻[8]提出切除故障相上下相同的子模塊故障個數并且采用PR控制器來達到環流成分不改變的目的,但需要整定PR參數;文獻[9]基于平均開關狀態模型分析了環流成分,并且提出了一種通用環流抑制器。文獻[10]建立了環流電壓數學模型,并且提出了橋臂不對稱運行的重復控制策略,需要設計控制參數。
本文提出一種無冗余子模塊模型預測容錯控制策略,使子模塊之間互為冗余,控制方式采用模型預測控制,無需整定復雜的控制參數,采用分步的最優電平控制,無需設計權重因子,在子模塊出現故障時,只需將故障橋臂的故障子模塊切除,改變剩余子模塊的電容參考值,就可以實現MMC子模塊故障的無冗余容錯控制,在保證控制效果的同時能夠最大程度提高子模塊的利用率,最后利用MATLAB/Simulink搭建了仿真系統,證明了該控制策略在MMC發生子模塊故障時能夠控制系統正常運行。
1??? MMC數學拓撲結構及其數學模型
MMC的原理如圖1所示,其由三相橋臂并聯而成,Larm為橋臂電感,能夠限制環流,R和L分別為網側等效電阻與等效電感,Udc是直流側電壓源。
子模塊內部結構見圖1,是由兩個串聯的開關管與一個電容并聯組成,并且每個開關管反并聯一個二極管,正常工作模式有兩種,當上管開通下管關斷時,子模塊輸出為電容電壓,當下管開通上管關斷時,子模塊輸出電壓為0。
由于MMC三相橋臂是對稱結構,本文選取其中的一相為例來進行分析,MMC的單相等效電路見圖2,各電流量可以表示為:
idiffj=ilj+iuj2
ij=iuj-ilj
izj=idiffj-idc3
其中iuj是上橋臂電流,ilj是下橋臂電流,ij為換器輸出相電流,idc是直流電流,idiffj為內部電流,由1/3idc和三相環流izj組成,j為各相的相序a,b,c。由基爾霍夫電壓定律和基爾霍夫電流定律可得到如下方程:
Udc2-uuj-usj-Rij=Larmdiujdt+Ldijdt(1)
Udc2-ulj+usj+Rij=Larmdiljdt-Ldijdt(2)
將式(1)和式(2)作差值與求和可以分別得到式(3)和式(4):
ej=ulj-uuj2=usj+Rij+L+Larm2dijdt(3)
Udc2-uuj+ulj2=Larmdidiffjdt(4)
其中ej為換流器輸出相電壓,uuj,ulj分別為上下橋臂輸出電壓,usj為網側電壓,ij為輸出相電流,式(3)是MMC的外部特性方程,分析式(3)可知,換流器輸出相電流與上下橋臂電壓之差有關;式(4)是MMC的內部特性方程,分析式(4)可知,橋臂內部電流與直流電壓跟上下橋臂電壓之和的差有關。
2??? 交流電流容錯控制
本文設計了一種逆向預測的控制方法。對公式(3)進行一階向前差分可以得到:
ej=usjk+Risj(k)+(L+Larm2)(ij(k+1)-ij(k))Ts(5)
將式(3)中的相電流預測值ij(k+1)用相電流參考i*j(k+1)值代替,得到的e*k為最優輸出相壓。其中usj(k)為k時刻交流側電壓采樣值,ij(k)為k時刻輸出相電流采樣值,Ts為模型預測的采樣周期。根據上下橋臂電壓與輸出相電壓的關系,再利用最近電平逼近,可以得到上下橋臂需要投入子模塊的個數,記為Nuj,Nlj。
Nuj=round(Udc-2e*j2u*c)(6)
Nlj=round(Udc+2e*j2u*c)(7)
其中u*c是正常運行時子模塊電容電壓參考值,若此時某相上橋臂有Nerr個子模塊因為故障被切除,為保持三相瞬時投入的電壓與直流電壓相等,則此相上橋臂直流側電壓由N-Nerr個子模塊分擔,此相下橋臂子模塊投切個數仍為N個不變,即此時故障相上橋臂子模塊電容電壓的參考值為uerrc,其中:
uerrc=UdcN-Nerr(8)
故障相下橋臂的子模塊電壓則保持不變。其中設ucmax為子模塊電壓的額定值,則每相橋臂能夠最大的故障子模塊數量
Nmaxerr=N-floor(Udcucmax)
為了保證輸出相電流的控制,上下橋臂需要投入子模塊的個數為:
Nlj=round(Udc+2e*j2uerrc)(9)
Nuj=round(Udc-2e*j2uerrc)(10)
圖3為模型預測交流電流容錯控制流程圖。
3??? 環流抑制控制
公式(3)是MMC的外部輸出特性,輸出相電流由上下橋臂電壓之差決定,公式(4)是MMC的內部特性,內部電流由直流側電壓與上下橋臂電壓之和的差值決定,所以可以在保證上下橋臂電壓之差不變的情況下,減少上下橋臂電壓之和與直流側電壓差的差值的方法來降低各相之間的環流。具體的做法是在上下橋臂補償相同的電壓,使得直流側與換流器電容電壓之和的差最小。采用五電壓電平補償,當橋臂沒有子模塊故障時,每個子模塊的電壓參考值為UdcN,則補償電壓集
udiff-2UdcN,-UdcN,0,UdcN,2UdcN(11)
當橋臂內有Nerr個子模塊發生故障時,此時故障橋臂相的子模塊電容電壓的參考值則為uerrc,則故障橋臂的補償電壓參考值
udiff{-2UdcN-Nerr,-UdcN-Nerr,0,UdcN-Nerr,2UdcN-Nerr}(12)
非故障橋臂的補償電壓參考值不變。具體過程如下,對公式(4)采用一階向前差分可以得到:
idiffj(k+1)=Ts2Larm(Udc-uuj(k+1)-ulj(k+1)-2udifj)+idiffj(13)
由于三相相間電流是由三分之一的直流電流與相間環流組成,為了盡可能的抑制環流,則三相相間內部電流的參考值i*diffj=13idc。構建環流抑制價值函數:
J=i*diffj-idiffj(k+1)(14)
通過滾動計算,可以得到J取最小所對應的補償電壓,通過環流抑制最優補償電壓計算出最優補償電平,最優補償電平數記為ndiff。
ndiff=udiffuc(15)
其中uc為子模塊的額定電壓,正常橋臂的額定電壓為u*c,故障橋臂的額定電壓為uerrc。其環流抑制容錯控制的流程見圖4。
4??? 仿真驗證
為驗證本文所提容錯控制策略,在MATLAB/Simulink中搭建41電平仿真平臺來驗證隨提MMC容錯控制策略的有效性。仿真參數見表1。
本文選取的外環控制方法是定有功功率P與無功功率Q,通過功率方程和坐標Tabc/dq變換得到兩相靜止坐標系下的相電流的參考值,再經過坐標Tdq/abc變換,得到直角坐標系下的三相相電流參考值。
在子模塊出現故障時,為了驗證系統的輸出表現,在t=0.1s時,b相上橋臂設置5個子模塊出現故障,在t=0.3s時,a相下橋臂設置3個子模塊出現故障,并且將故障子模塊切除出主電路,但不投入容錯控制策略。同時設置對比實驗,在故障時刻投入本文提出的子模塊故障模型預測容錯控制策略。外環采用定有功功率P和定無功功率Q控制,給定有功功率P=4.5 MW,無功功率Q=0 MVar。
觀察圖5a可以看到,在出現子模塊故障后,如果沒有容錯控制,系統的有功功率和無功功率會有很大的波動,觀察圖5b可以看到,系統的有功功率和無功功率只是在出現故障的時刻有一個抖動,在投入本文的容錯控制策略之后,系統能夠追蹤給定的有功功率和無功功率。
(a)未投入容錯控制下的功率響應曲線
(b)投入容錯控制下的功率響應曲線圖 5??? 功率響應曲線對比
圖6為直流電流對比圖,圖6a為未投入容錯控制時系統的直流電流,可以觀察到直流電流波動非常大,對系統的沖擊很大,換流器不能正常工作,圖6b為容錯控制下的直流電流,直流電流只是在出現故障時刻有一個較大的波動,其余情況波動很小。
(a)未投入容錯控制下的直流電流波形
(b)容錯控制下的直流電流波形圖 6??? 直流電流曲線對比
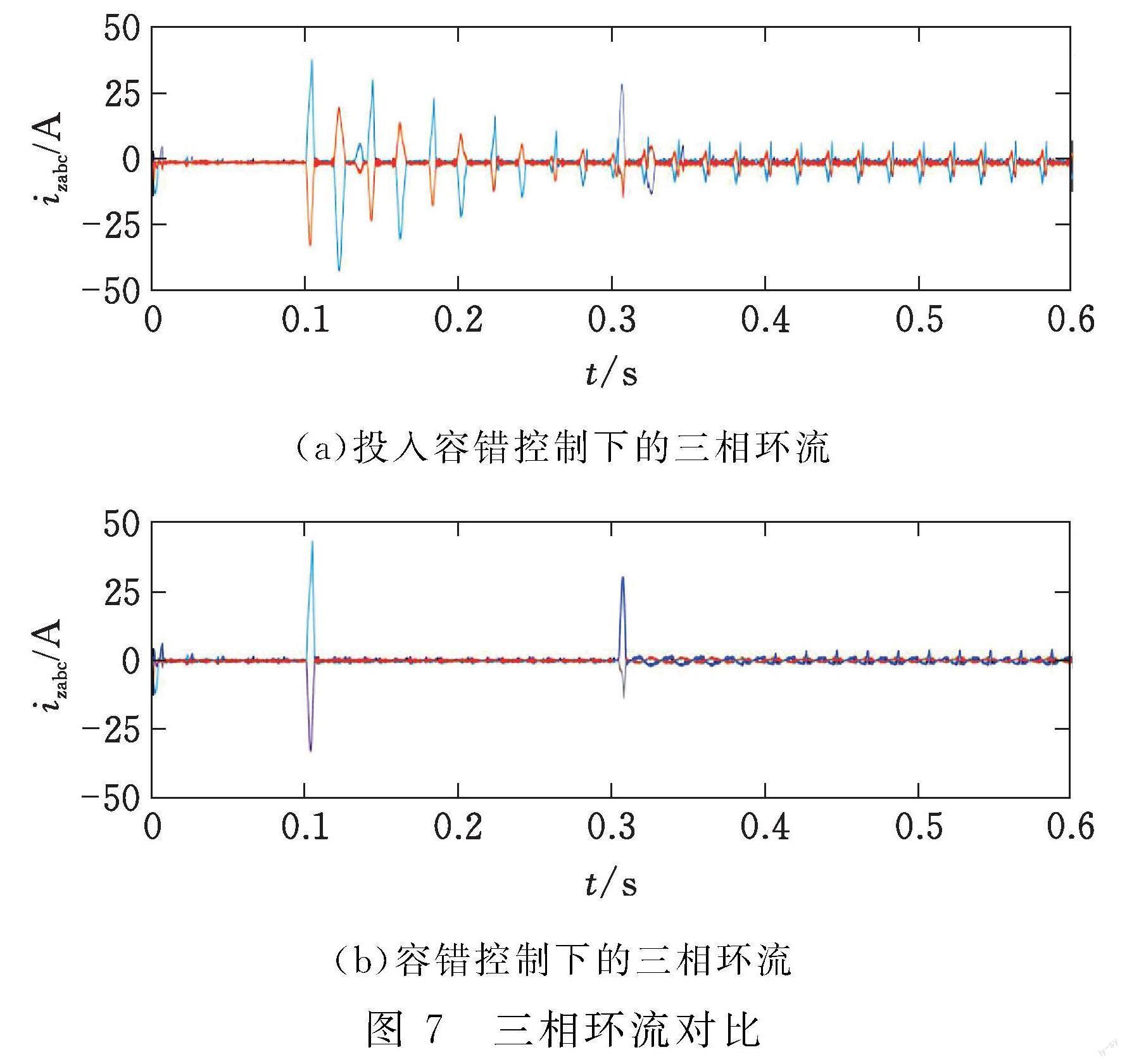
根據圖7a和圖7b的對比,可以看到,在未投入容錯控制時,三相環流的幅值很大,在投入了容錯控制后,環流的幅值明顯變低,并且只是在故障時刻環流有一個較大的波動。
(a)投入容錯控制下的三相環流
(b)容錯控制下的三相環流圖 7??? 三相環流對比
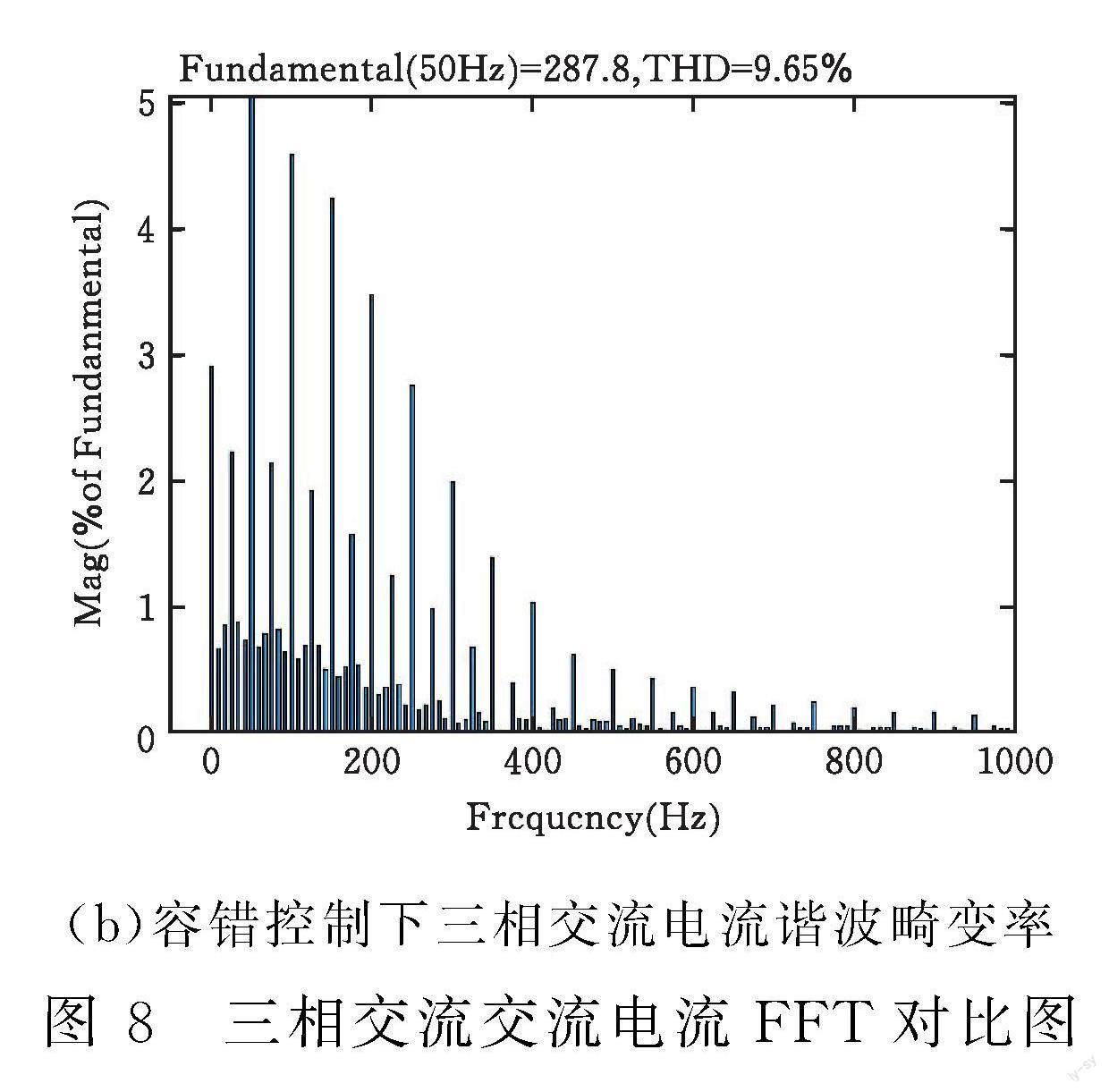
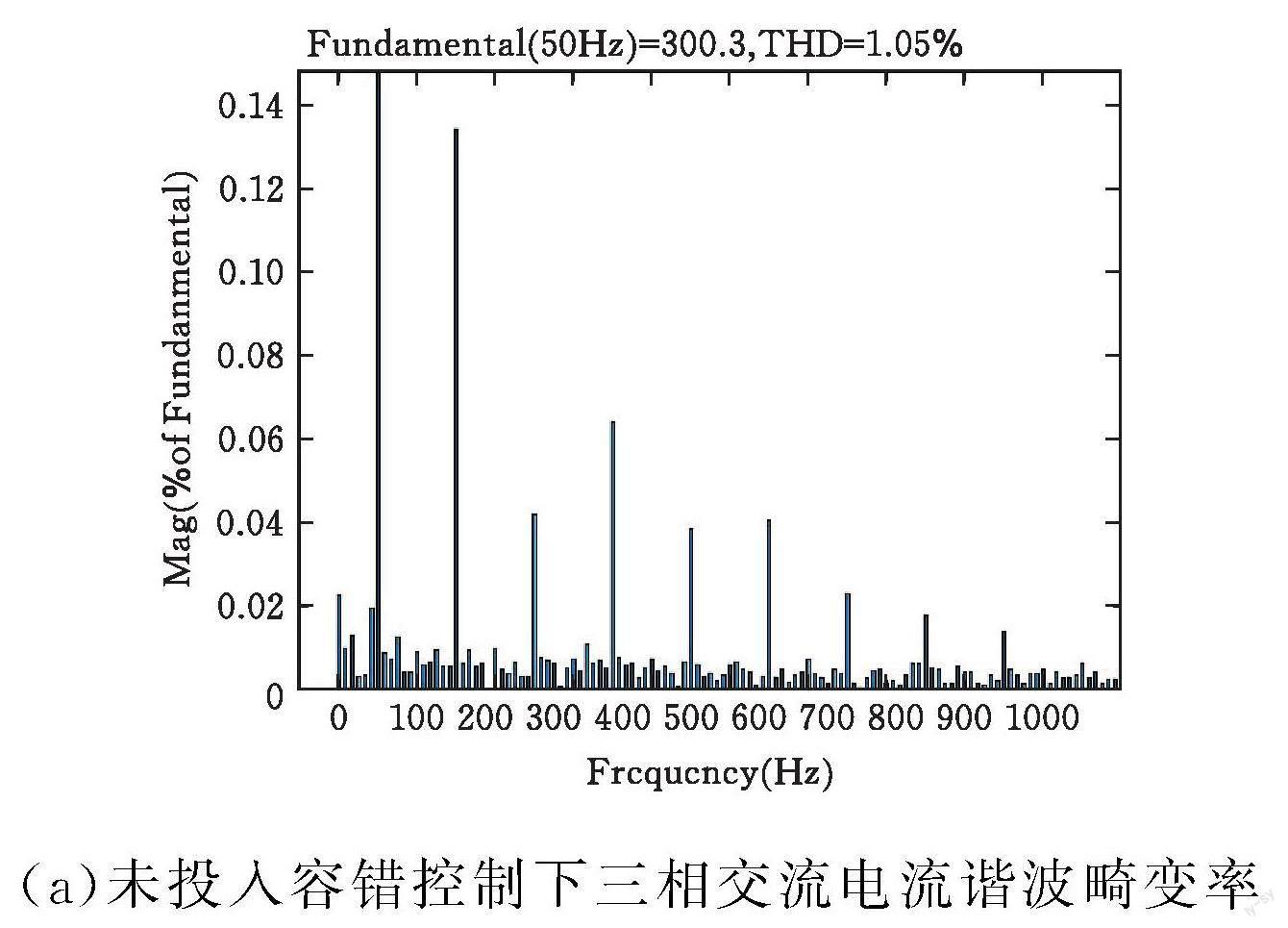
對比圖8中三相交流電流的FFT分析可知,在未投入容錯控制前,系統的三相輸出交流電流的諧波畸變率很大,超出規定標準,在投入容錯控制后,三相輸出交流電流的諧波畸變率恢復正常。
(a)未投入容錯控制下三相交流電流諧波畸變率
(b)容錯控制下三相交流電流諧波畸變率圖 8??? 三相交流交流電流FFT對比圖
圖9中的ucbup為b相上橋臂子模塊電容電壓值,ucblow為b相下橋臂子模塊電容電壓值,在上橋臂出現5個子模塊故障并切除后,通過模型預測容錯控制策略,保證b相總的投入電壓不變,b相上橋臂的子模塊電壓值維持在容錯控制給定值571V附近上下波動,下橋臂電容電壓不受影響,繼續在給定值500 V上下波動,在t=0.3 s時刻,a相下橋臂出現子模塊故障并切除主電路,a相的上橋臂電壓繼續工作在500 V附近,下橋臂電壓通過容錯控制,使其穩定在540 V附近波動。模型預測容錯控制能夠很好地控制故障相的子模塊電壓,使其在容錯控制策略下的給定值上下波動。
觀察圖11c相電容電壓可知,通過模型預測容錯控制策略,c相子模塊電容電壓不受故障相的影響,始終維持在500 V附近波動。
5??? 結論
針對傳統的子模塊故障冗余控制策略需要設置冷備用子模塊或熱備用子模塊,子模塊利用率低等問題,本文提出了一種無冗余子模塊模型預測容錯控制策略,通過改變子模塊電容電壓的參考值,將故障子模塊的能量由剩下的正常子模塊平均分擔,環流抑制控制中,通過改變故障橋臂補償電壓的方式,使得直流側電壓與換流器三相電容電壓差值最小,來達到更好的環流抑制效果。通過實驗仿真和分析,可以得到如下結論:
1)本文提出的無冗余子模塊容錯控制策略不需要設置冗余的冷備用或熱備用子模塊,并且在發生子模塊故障時,只需要切除故障橋臂的故障子模塊,其余橋臂的子模塊數量不改變,最大限度地提高了子模塊的利用率。
2)通過仿真實驗可以證明本文提出的子模塊模型預測容錯控制策略不僅僅能夠實現子模塊故障后正常運行,并且能夠保證故障前后,系統的運行效果沒有明顯差別。
3)本文提出的模型預測容錯控制策略雖然能對子模塊故障進行容錯控制,并且不影響換流器的輸出功率的大小和輸出電流質量,但是在突變時刻,有功功率、無功功率、三相環流、直流電流都有一個很短時間的波動,如何減小波動是接下來要研究的問題。
[參考文獻]
[1]郭春義,吳張曦,趙成勇.特高壓混合級聯直流輸電系統中多MMC換流器間不平衡電流的均衡控制策略[J].中國電機工程學報,2020,40(20):6653-6663.
[2]胡鵬飛,江道灼,周月賓,等.模塊化多電平換流器子模塊故障冗余容錯控制策略[J].電力系統自動化,2013,37(15):66-70.
[3]管敏淵,徐政.模塊化多電平換流器子模塊故障特性和冗余保護[J].電力系統自動化,2011,35(16):94-99.
[4]郝亮亮,張靜,顧亞旗,等.基于橋臂能量預測的模塊化多電平換流器子模塊故障優化容錯控制策略[J].電工技術學報,2018,33(16):3697-3706.
[5]李可軍,張正發,劉智杰,等,王卓迪.MMC橋臂不對稱運行特性分析及子模塊故障下的控制策略[J].高電壓技術,2016,42(10):3059-3067.
[6]劉英培,楊海悅,梁海平,等.MMC-HVDC系統冗余容錯模型預測控制[J].電網技術,2017,41(08):2443-2454.
[7]林周宏,劉崇茹,林雪華,等.基于載波移相調制的模塊化多電平換流器冗余保護策略[J].電力系統自動化,2015,39(20):109-115
[8]武文,吳學智,荊龍,等.模塊化多電平變流器子模塊故障容錯控制策略[J].電網技術,2016,40(01):11-18.
[9]吳學智,武文,荊龍,等.MMC子模塊故障運行特性分析與容錯控制策略研究[J].高電壓技術,2016,42(10):3083-3091.
[10] 李凱,趙爭鳴,袁立強.模塊化多電平變換器上、下橋臂不對稱運行環流重復控制[J].電工技術學報,2016,31(20):122-129
MMC Fault Tolerant Control Based on Model Predictive Control
WANG Jian ,YU Yu ,YANG Wenkang
(School of Electrical and Electronic Engineering, Hubei Univ. of Tech., Wuhan 430068,China)
Abstract:Sub module failure is the main failure type of modular multilevel converter (modular multilevel converter MMC). A model predictive fault tolerant control strategy is proposed. There is no need to set up redundant su-modules. After failure, only the faulty sub-module needs to be removed. A software fault tolerant control method based on model predictive control. While realizing MMC output phase current tracking and sub-module voltage equalization, the three-phase circulating current is suppressed by adjusting the compensation voltage of the faulty bridge arm. Simulation experiments prove the proposed fault tolerant control strategy Effectiveness.
Keywords:Model predictive control; sub-module failure; fault tolerant control; circulation suppression
[責任編校: 張巖芳]