直升機顯模型跟蹤解耦控制設計
2023-12-13 13:20:02王曉鋒賴水清
直升機技術 2023年4期
王曉鋒,賴水清
(1.中航技進出口有限責任公司,北京 100176;2.中國直升機設計研究所,江西 景德鎮 333001)
0 引言
直升機作為控制對象,與固定翼飛機相比,具有更復雜的氣動特性,四個控制通道(俯仰、橫滾、航向、總距)間存在著強軸間耦合,尤其是在貼地飛行及懸停狀態。俯仰與橫滾交叉耦合,總距與俯仰,總距與航向之間的交叉耦合成為影響直升機飛行品質的主要因素。因此解耦設計已成為直升機控制界普遍關注的研究課題。目前直升機控制系統是否具有解耦功能已成為評價其先進性的主要指標之一,并列入了直升機主動控制技術研究范圍。
國外從70年代開始不斷研究直升機解耦控制技術。70年代中期,“黑鷹”直升機上率先采用具有解耦效果的漢密爾頓公司飛控系統。80年代中期,美國陸軍與DFVLR共同制定了直升機顯模型跟蹤自適應解耦控制研究計劃:將顯模型設計成四通道線性理想解耦動力學模型,然后設計一個合適的控制律,使直升機強迫跟蹤顯模型,以達到解耦效果。地面仿真試驗和飛行試驗,驗證了上述解耦方案可明顯改善飛行性能與飛行品質,極大地減輕駕駛負擔。該項技術已獲得工程應用,如美國的RAH-66和歐直的NH-90直升機,都是采用顯模型跟蹤解耦控制技術設計飛行控制律[1]。
1 顯模型跟蹤解耦控制系統設計
1.1 系統設計的基本機理
顯模型跟蹤控制系統要求開發顯模型跟蹤的控制律,使控制對象在一個采樣周期內強迫跟蹤顯模型,并具有優良的跟蹤動特性與穩態性能。顯模型為一電子模型,它體現了飛行員對飛行器的操縱特性要求。因此,改變模型特性即可以靈活地改變操縱特性的要求。對于直升機的俯仰、橫滾、航向、總距四個通道,可根據飛行品質要求分別設計顯模型。由于各通道直接跟蹤各自的顯模型,而其它通道處在鎮定狀態,因此顯模型跟蹤系統具有良好的解耦性能[2]。顯模型跟蹤控制系統的結構圖如圖1所示。

圖1 顯模型跟蹤控制系統結構圖
跟蹤的動靜態性能將取決于前向增益陣R和積分常數陣G4。其中,調節對角陣R的元素可以改善系統在一拍內跟蹤的動態特性,調節對角陣G4的相應元素可以減少系統一拍跟蹤的穩態誤差。需要指出的是,四個作動器中任一個的速率或位置限制超出飽和值時,控制量與直升機實際輸出量之間的誤差會迅速建立起來,且由于飽和積分而導致系統不穩定。克服的辦法是停止控制器輸出信號的積分,哪個軸的作動器處于限制狀態,就把G4陣的相應元素置零。
顯模型跟蹤控制系統具有良好的解耦性能,因為直升機的實際狀態量分別跟蹤相應的模型輸出,而其他通道模型輸出量為0,處在鎮定狀態。由操縱通道工作而耦合至鎮定通道的耦合運動可視作“干擾”,而良好的鎮定系統本身具有抑制耦合干擾的能力。這樣,就從本質上減小了直升機的軸間耦合,極大地改善了直升機系統的解耦性能。
1.2 顯模型的設計
顯模型的設計可以充分體現模型跟蹤控制系統設計的靈活性,可以根據不同的性能指標,采用不同的解耦顯模型。常用的兩種解耦顯模型是一階線性解耦模型和二階線性解耦模型,用傳遞函數表示為:
其中:C為靈敏系數,T為時間常數,ξ為阻尼系數,ωn為帶寬。
1.2.1 顯模型帶寬的選擇
帶寬的選擇直接關系到顯模型跟蹤解耦性能的好壞。在一定范圍內,系統的跟蹤性能會隨著帶寬的增加而下降。這是因為直升機的響應速度較慢,本身帶寬比較窄。如果顯模型帶寬過大,直升機響應速度將難于跟上顯模型輸出狀態的變化。根據直升機模型的帶寬,并結合ADS-33規范對各通道小幅度操縱輸入的短周期響應的要求,設定各通道對應的帶寬ωn。
1.2.2 靈敏系數C的確定
靈敏系數C的選擇有兩條準則:一種是在駕駛員操縱下獲得良好的性能,這在很大程度上取決于經驗和主觀感覺;另一種定量的方法是利用ADS-33規范對直升機性能的要求來確定靈敏系數。
1.2.3 阻尼系數ξ的選取
根據ADS-33對系統阻尼的要求,結合工程經驗,一般選取二階線性解耦模型的阻尼系數ξ=0.7。
1.3 控制陣G3的設計
設計模型跟蹤系統控制律的第一步是將自然直升機非線性動力學方程線性化,產生線性化運動方程:

(1)
然后用后向差分法將上述方程離散化得:

(2)
式中T是模型跟蹤系統的采樣時間,
式(2)可寫為 :
ΔX[i+1]=[I-AT]-1ΔX[i]+
[I-AT]-1BTΔδ[i+1]
令
AD=[I-AT]-1,BD=[I-AT]-1BT
則
ΔX[i+1]=ADΔX[i]+BDΔδ[i+1]
(3)
因為上述線性運動方程是相對于配平狀態的小擾動而進行線性化的,因此,式(3)的小擾動增量運動可寫成:
X[i+1]-XT[i]=AD(X[i]-XT[i]+
BD(δ[i+1]-δT[i])
(4)
式中XT[i]為配平狀態。
令Δδ=δ[i+1]-δT[i],表示四個作動器的當前拍位置相對于配平位置的變化。
假定系統能實現:經歷一個采樣周期后可使系統進入配平狀態。這是本顯模型跟蹤控制系統設計中的一個極其重要的假設。
則X[i]=XT[i]
式(4)可寫為:
X[i+1]=X[i]+BDΔδ
(5)
模型跟蹤控制系統的目的應是使實際狀態跟蹤指令狀態。最好的跟蹤效果是實際輸出X[i+1]和模型輸出Xm[i]只相差一個采樣周期,即一拍的時間延遲,也即,經一拍的采樣周期T后,將直升機控制到所需的配平狀態,因此:
X[i+1]=Xm[i]
(6)
將(6)式代入方程(5)得:
Xm[i]-X[i]=BDΔδ
(7)
可最終獲得該系統的控制律:

(8)
式中控制陣G3定義為自然直升機離散控制陣的逆:
2 系統參數優化
由于控制陣G3的設計只能夠保證直升機一拍跟蹤模型的輸出,在這一拍時間內,系統跟蹤的動態品質的好壞和穩態誤差的大小取決于各參數矩陣;此外,顯模型的帶寬,采樣周期的大小都對系統的跟蹤性能有很大的影響,因此需進行參數優化[3]。
2.1 參數R的選取
由圖1可知,控制陣G3前乘以一個R因子,用來改變系統內回路的前向增益,改善系統的動態跟蹤性能,即保證每一拍內有良好的模型跟蹤動態性能。R是一個對角陣,對角線上的元素對應各通道的增益大小。增益太小,解耦效果不好;增益過大,會引發振蕩。設計過程中設定幾個R值,在比較的基礎上確定性能最優的R值。
2.2 G4陣的選取
矩陣G4對角線上各元素代表四個通道的積分常數,調節積分常數的大小可以改善一拍時間內跟蹤的穩態誤差。選取的原則和上面相似,即四個通道分別選取幾組積分常數,對仿真結果加以比較,選取最合適的參數。
2.3 G1,G2,G5陣的選取
G1陣和G2陣是系統內回路與外回路的選擇陣,通過G1選取姿態角作為系統外回路,通過G2選取姿態角速率作為內回路。
G5陣確定外回路俯仰通道和滾轉通道的增益,增益太小,調節時間過長,增益太大,其它通道容易出現振蕩。應根據ADS-33所規定的姿態響應要求,選取縱向通道和橫向通道的外回路增益。
2.4 模型帶寬選取
顯模型跟蹤的性能與模型的帶寬選擇有很大的關系,由于控制對象的帶寬限制,選擇模型帶寬時,應考慮與控制對象帶寬的匹配。顯模型的頻帶過寬,將會導致直升機實際輸出難以跟蹤顯模型輸出。如果顯模型的頻帶過窄,則調節時間過長,達不到要求。
2.5 采樣周期的選取
控制信號變化快時,要求相應地減小采樣周期。但控制律的設計是基于一拍跟蹤的原理,要保證對象在一拍之內達到配平狀態,如果采樣周期過小,系統受直升機帶寬的限制,則不能保證在一拍之內達到跟蹤目的,必將引起系統發散。
3 設計應用
以一直升機為例,采用上述顯模型跟蹤法設計解耦控制律,并在Matlab6.0的Simulink工具箱環境下進行數字仿真。圖2為仿真結構圖。通過參數優化,得到的控制律最佳參數如下。
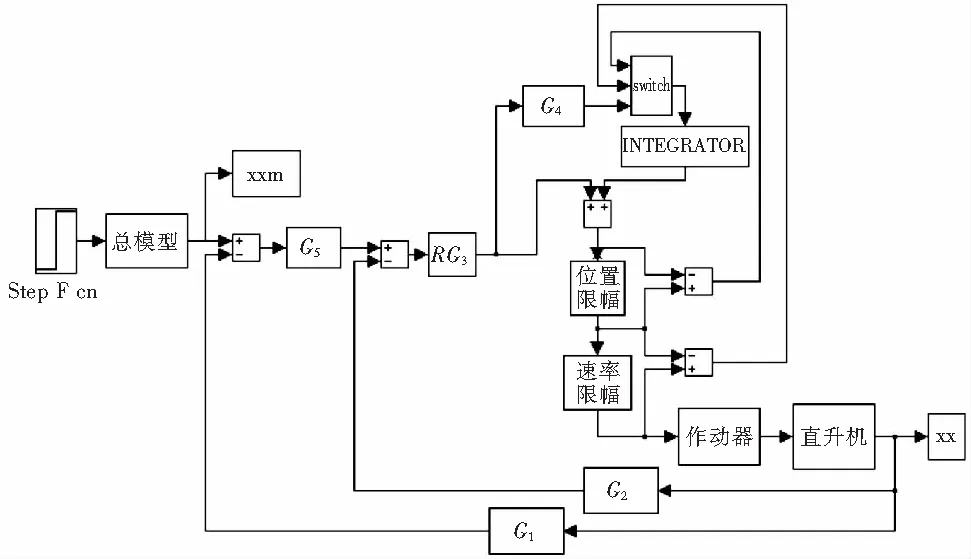
圖2 顯模型跟蹤解耦控制律仿真結構圖
最終仿真結果部分如圖3-圖6所示。按照GJB902B-2017《軍用直升機飛行品質規范》進行飛行品質評定,結果滿足ADS-33D等級1要求。

圖3 縱向通道輸入1 cm階躍信號時各通道的響應曲線

圖4 橫向通道輸入1 cm階躍信號時各通道的響應曲線

圖5 航向通道輸入1 cm階躍信號時各通道的響應曲線

圖6 總距通道輸入1 cm階躍信號時各通道的響應曲線
4 跟蹤解耦性能評估
定量地研究模型跟蹤解耦控制系統的設計性能,需要提出系統性能準則。以下對系統的跟蹤與解耦性能分別進行討論。
4.1 跟蹤性能


(9)

最后,模型跟蹤性能定義為:

(10)
4.2 解耦性能
用類似的方法可以對每個軸的模型解耦性能進行統計測量。對同樣的桿橫向階躍輸入信號的俯仰軸的解耦性能可以定義為

(11)
上面定義的性能指標將隨顯模型帶寬的變化,系統的采樣時間,測量時間N以及輸入的階躍信號值的大小而變化。因為仿真模型是線性的,故性能指標不隨階躍輸入信號的大小而改變。
以直升機為例,設計的模型跟蹤系統的各通道的Q值見表1(表中對角線上的數據表示四通道模型跟蹤性能,其他元素表示各通道解耦性能)

表1 各通道跟蹤性能與解耦性能評估表
從上表可以看出,模型跟蹤系統使俯仰、橫滾、偏航、總距四個通道都具有滿意的跟蹤與解耦效果。直升機的縱向運動與橫向運動之間,軸與軸之間的耦合作用大大減少,既改善了系統的穩定性,又保證了良好的操縱性能。減小了駕駛員的工作強度,也降低了操縱的難度,從而起到了改善駕駛性能,提高控制精度的作用。
4.3 魯棒性
為了驗證系統的魯棒性,我們僅考慮系統控制對象的建模誤差,即控制陣不變,直升機的參數攝動。從仿真結果中可以看出,系統參數攝動,系統的跟蹤解耦特性依然很好,表明顯模型跟蹤解耦控制系統具有良好的魯棒性。
5 結論
控制律仿真表明:模型跟蹤系統的解耦效果良好,跟蹤性能好,具有良好的魯棒性,能使飛行品質達到GJB902B-2017《軍用直升機飛行品質規范》等級1要求(無論是迅猛機動還是有限機動)。采用顯模型跟蹤法設計的控制律易于實現,具有很高的工程使用價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
