基于奇異攝動分解的固定翼無人機抗擾動滑模控制
2023-12-16 04:48:22梅平張豪朱涵智蘇東彥趙迅
南京信息工程大學學報 2023年6期
梅平 張豪 朱涵智 蘇東彥 趙迅
奇異攝動法;固定翼無人機;滑模控制;干擾觀測器;動力學建模
0 引言
固定翼無人機具有續航時間長、巡航范圍大、使用成本低、信息感知強等優點,作為高機動性載具能夠搭載多種儀器完成相應任務,被廣泛應用于巡邏偵察、電子干擾、戰場支援、森林滅火、地形測繪等軍民用領域.然而,固定翼無人機是典型的具有非完整線性約束的運動體,其動力學模型具有耦合程度高、非線性強等特點[1].同時,風速等外界的擾動對于無人機的飛行影響也較大,對于不同形態的固定翼無人機,飛行姿態與速度的控制效果也不盡相同.因此,固定翼無人機的控制相較于旋翼等其他無人機控制更為復雜,控制難度也更大.
對于固定翼飛行策略優化控制問題,眾多國內外優秀學者都有不同的見解、設計與實踐.王力等[2]在設計固定翼控制方法時,引入了非線性干擾觀測器對復合干擾進行精確估計,同時設計自適應二階PID滑模控制器消除了切換控制引起的抖震現象.宗群等[3]針對固定翼無人機的姿態和速度控制中存在不確定和外部擾動的問題,設計自適應超螺旋滑模干擾觀測器和控制器,從而實現固定翼無人機對速度和姿態命令的有限時間精確跟蹤.蒲明等[4]將新型快速Treminal滑模與動態滑模相結合,避免了控制器抖振,設計了近空間飛行器快、慢回路控制器,并采用改進的非線性干擾觀測器逼近近空間飛行器復合干擾,進一步提高控制精度.Raza等[5]利用輸出反饋控制拓撲為非線性固定翼模型設計魯棒控制器并且引入不確定性對控制器和觀測器的魯棒性進行了評估.然而,上述文獻未對固定翼模型進行解耦合運算,而是直接對角速度回路和速度、姿態回路采用非線性控制設計方法設計控制器,對于高度耦合系統來說這樣處理顯然難以保證控制的精度和準確性.
在系統理論與控制工程中,建模是一個基本問題.多數物理系統都含有快、慢動態耦合的現象.早期對這類系統的處理方法是簡單地忽略快變模態從而降低系統的階數,然而,大量事實證明,基于這樣的簡化模型設計的控制效果往往與設計要求相距甚遠.比如,電力系統的快動態以毫秒計,但其能量十分巨大,快動態失調是導致電力系統崩潰的主要原因.因此,如果忽略快動態來分析電力系統的穩定性,效果與實際要求相差甚遠[6].奇異攝動方法是有效處理這類問題的工具,其思想是首先忽略快變量以降低系統階數,然后通過引入邊界層校正來提高近似程度[7].這兩個降階的系統就可以用來近似原系統的動力學行為[8].在飛機的控制中,速度的變化遠快于角度和位置的變化,可以考慮將此類系統建為奇異攝動模型[9].因此,本文考慮到固定翼無人機的快、慢動態耦合特性,首先將其建立成奇異攝動模型,再利用奇異攝動分解能夠有效降低系統階次[10]、消除系統剛性問題的特性,將固定翼無人機的奇異攝動模型分解為以角速度為快變量的角速度回路和以速度、姿態為慢變量的速度、姿態回路,大大降低控制器的設計復雜性[11].
不同于PID控制,滑模控制[12-13]本質上是特殊的非線性控制,它通過控制作用使得系統的狀態軌跡運動到合適的切換流形,然后沿此流形逐漸運動到平衡點,系統一旦進入滑模運動,在一定條件下便會對外部的干擾及參數擾動具有不變特性,因此,滑模控制方法具有算法簡單、抗干擾性能好以及容易實現等優點,適用于不確定非線性多變量的控制系統[14].但滑模控制因存在不利的抖動,對系統控制會造成影響,為此本文采用改進的滑模控制方法,從而減少傳統滑模所產生的抖動現象,降低系統跟蹤誤差,提高穩定性.
本文的主要工作體現在以下幾個方面:
1)建立固定翼無人機的奇異攝動模型;
2)利用奇異攝動時標分解法對上述奇異攝動模型在不同時間尺度內分解,建立解耦的角速度回路和速度、姿態回路;
3)提出改進的滑模控制器,減少系統抖動;
4)提出基于干擾觀測器的滑模控制,減少外部干擾.
1 固定翼奇異攝動系統建模
1.1 坐標系的建立與變換
運動中的固定翼無人機的動力學方程通常可以用非線性狀態空間形式或獨立的一階常微分方程組表示,由于方程中包含飛行相關的空氣動力、轉動慣量等因素,且橫、縱向運動之間會發生耦合,為有效表示飛機的運動狀態,建立合適的坐標系是極其必要的.為了描述固定翼無人機的速度、位置和姿態變化,本文采用機體坐標系和地面坐標系來描述飛機的飛行狀態,并且給出相應的變換矩陣.
選取地面上任意一點ob為地面坐標系原點,xb指向正北,yb與xb垂直且指向正東,zb指向地心且與面xbobyb垂直.機體坐標系原點oe位于固定翼無人機質心處,oexe軸指向固定翼機頭方向,oeye軸垂直于oexe軸指向飛機右側,oeze軸垂直于xeoeye指向固定翼機腹.坐標關系如圖1所示.
為建立固定翼無人機動力學模型,現將各方向運動由參數表示,各參數及其含義[15]如表1所示.

表1 機體坐標系下運動參數及其含義
地面坐標系下能夠表示出固定翼無人機當前的位置與姿態變化,在地面坐標系下,可分別用θ,ψ,Φ表示固定翼無人機的俯仰、滾轉、偏航角,xb,yb,zb表示無人機在地面坐標系下的位置.
1.2 固定翼無人機動力學建模
在不影響實驗及算法的基礎上,為方便分析,本文將做出如下假設:
假設1:將整架飛機視為剛體,且在運動時間間隔內忽略油量或電量消耗,認為飛機質量為常量.
假設2:由于無人機是具有較小質量和體積的舵機,故可忽略飛機轉動部件的陀螺效應及操作控制系統的動力學特性影響.
假設3:飛機質量分布關于xeze平面對稱,即D,F為0.忽略地球自轉對飛機的影響且重力加速度g不隨著飛機的運動而改變.

則可將固定翼無人機非線性模型[15]表示為
(1)
式(1)中各參數含義見表1.
氣動力與氣動力矩的表達式(包含系統產生的推力與推力矩)如式(2)、(3)所示:
(2)
(3)

CYδAδA+CYδRδR,
ClδAδA+ClδRδR,
CnδAδA+CnδRδR,
(4)

表2 空氣動力系數計算參數
1.3 奇異攝動模型建立
為滿足奇異攝動法對系統進行快慢分解的要求[17-18],可將各狀態參數表示為矩陣與行列式的形式,其表示方法如式(5)所示.
(5)
由于固定翼無人機線速度和角度相較于角速度變化慢[9],因此能夠將線速度與角度作為慢變量、角速度作為快變量進行處理.由式(1)、(5)可將動力學模型表示為

(6)
其中,各矩陣表達式如下:
式中,D1,D2分別為系統所受到的內外部擾動,將式(6)進行移項整理化簡后可得:

(7)
奇異攝動系統是帶有小參數ε的系統,時標分解法在奇異攝動分解領域具有重要的作用.其原理為假設一個系統整體能夠分解為快變化(非主導因素)和慢變化(主導因素)的系統,快子系統較慢子系統的變化速率更快,達到穩定時所用的時間也更少.引入小參數ε(0<ε<1),令z1=εz,可將式(7)表示為

(8)
1.4 快慢子系統分解
奇異攝動法能夠根據不同的時間尺度將系統分解為近似于原系統的快子系統與慢子系統,從而得到系統的近似解,即快變量與慢變量,通過為兩個近似子系統分別設計控制方法以達到預期的控制目標.令快子系統的控制輸入為uf,慢子系統的控制輸入為us.
假設慢子系統的時間尺度為t,輸入為us(t),則令ε=0,代入式(8),可求得近似解:
zs=-G(xs)-1[G2(xs)+G3(xs)us+D2(x,z,t)].
(9)
將式(9)代入式(8)可得慢子系統表達式:

(10)
其中,A(xs)=f2(xs)-F1(xs)G(xs)-1G2(xs),U(xs,us)=[f3(xs)-F1(xs)G(xs)-1G3(xs)]us,
式(10)即為慢子系統數學模型.
由于z=zs+zf,u=us+uf.因此,在新的時間尺度τ(τ=t/ε)下,能夠求得:
G3(xs)(us+uf)+D2(x,z,t),
(11)
代入式(9)可得快子系統的數學模型為

(12)
綜上,式(10)、(12)共同構成了解耦后的固定翼無人機快慢子系統模型,其中,xs為慢子系統線速度、角度向量,zf為快子系統角速度向量.
2 干擾觀測器的設計
由于系統存在不確定性以及外界的干擾,為了盡量減小外界擾動對固定翼無人機控制系統產生的影響,提升系統的控制精度,本文引入了干擾觀測器對外界擾動進行逼近.
由文獻[19-20]提出的非線性干擾觀測器(Nonlinear Disturbance Observer,NDO)結構簡單且運算量較小,同時能夠獲得較高精度的估計值,本文采用此方法對系統內外部的擾動進行估計.假設系統的內外部干擾及其變化率有界,且其界限滿足:
(13)

針對慢系統設計的干擾觀測器形式如下:

(14)


(15)
求解式(15)可得:

(16)
由式(13)可得補償誤差的上下限:
(17)

3 基于干擾觀測器的滑模控制器設計
分別為奇異攝動法分解后的快慢子系統設計滑模控制器能夠有效地提升系統的控制精度和速度,其系統控制結構如圖2所示.
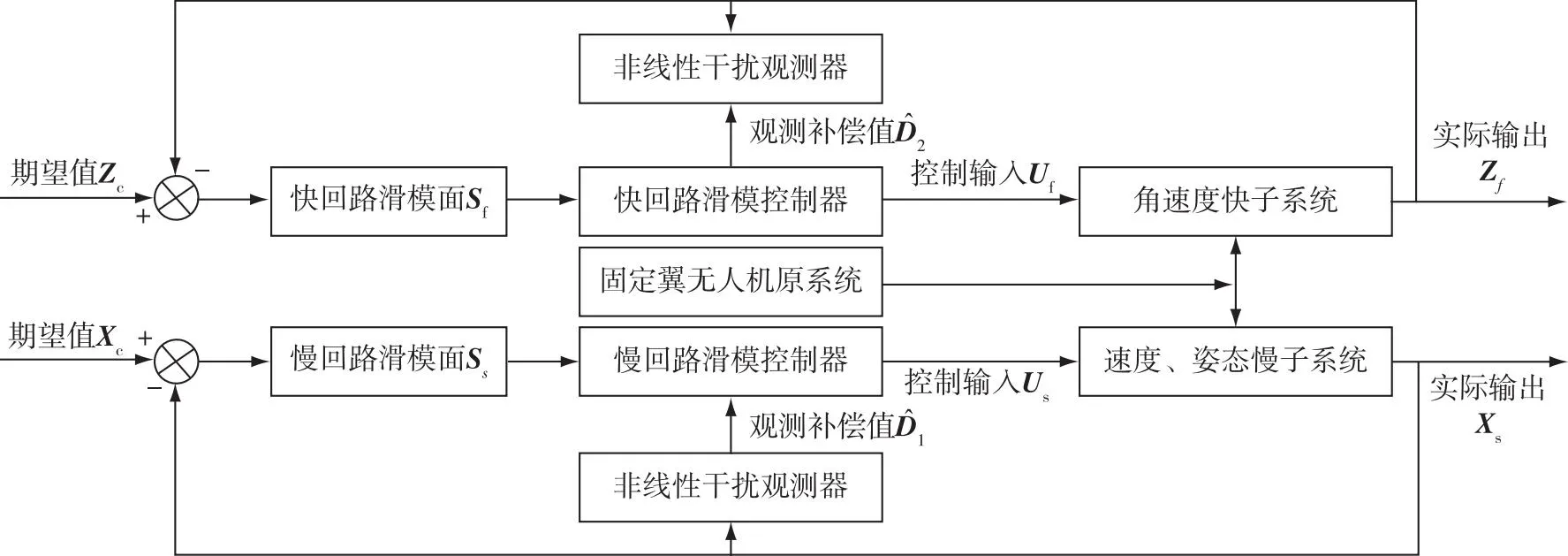
圖2 基于奇異攝動的抗干擾滑模控制Fig.2 Schematic diagram of anti-disturbance sliding mode control based on singular perturbation
本設計采用奇異攝動時標分解法,將固定翼無人機系統飛行控制問題轉化為不同的回路,分別設計飛行控制器,此方法在提高不同回路的控制精確性的同時能夠顯著提高快回路的控制響應速度.
3.1 基于干擾觀測器的角度回路滑模控制器設計
對慢子系統設計滑模控制[10,13,18]:

(18)
其中,Xc為給定的系統期望值,Xs為系統的實際輸出值,Cs為增益矩陣.

(19)


(20)
本文采用tanh函數代替sign函數,該切換項具有飽和函數特性且比飽和函數更加平滑,能夠有效減少滑模控制率的抖動現象,可以保證平滑切換,從而提高系統的穩定性和控制精度.采用李雅普諾夫方程證明穩定性時,該函數具有與sign函數相似的性質,具體可見參考文獻[23-24].
將式(18)代入式(17)并用李雅普諾夫方程:
對V求導可得:
(21)
3.2 角速度回路滑模控制器設計
對于快系統

(22)
設計滑模控制,可令滑模面Sf=Cfze,其中ze=zc-zf.


(23)
其中,
設所期望的到達率為

(24)
則相應的變結構控制率為

(25)
(26)

4 仿真與分析
由文獻[16]可獲得仿真所需的固定翼無人機質量、翼展、面積等數據,再由風洞實驗可獲得對應的固定翼氣動力參數數據.
本文仿真是基于Matlab程序中的Simulink運行的,仿真目標是對奇異攝動方法解耦后的機體坐標系下固定翼無人機速度及角速度進行控制.仿真所采用的固定翼無人機質量m=20.64 kg,翼展b=1.96 m,受力面積S=1.37 m2,三軸上的轉動慣量Ixe=1.607 3 kg/m2,Iye=7.508 5 kg/m2,Ize=7.186 5 kg/m2,慣性積J=-0.561,其余參數見表2.
給定期望值Xc為
(40H(t)-20,10H(t)-5,10H(t)-5,
2H(t)-1,2H(t)-1,2H(t)-1)T,
其中,

(27)
給定zc期望值為(2H(t)-1,2H(t)-1,2H(t)-1)T.NDO中參數取值如下:

(28)
圖3所示為解耦后的慢系統仿真曲線.

圖3 解耦后的基于擾動觀測器滑模控制線速度及姿態角仿真對比Fig.3 Simulation comparison of linear velocity and attitude angle of sliding mode control based on disturbance observer after decoupling
從圖3可以看出,采用tanh函數代替傳統滑模控制函數能夠很好地消除抖動現象,從而達到提高系統穩定性效果.圖3a—d分別為有無擾動觀測器情況下的慢系統線速度與姿態角輸出曲線,可以看出,當面對內外部的不確定擾動時,系統很難有效地對擾動做出調整,降低了系統的控制精度,同時也無法保證系統能夠追蹤期望曲線.因此,面對未知擾動時,加入擾動觀測器是很有必要的,對于本身與外部擾動數值相差過大的量,干擾觀測器也能夠很好地對擾動值進行估計抵消.
圖4為帶擾動觀測器的快系統角速度輸出曲線與未解耦的原系統滑模控制系統的角速度輸出對比,可以看出,對于采用奇異攝動方法解耦后的快系統,在新的時間尺度τ下單獨設計的控制器和擾動觀測器能夠使得角速度快速達到期望值,相較于傳統滑模控制,解耦后的快子系統具有更快的響應速度和更好的穩定性,同時能夠抵消大部分外界和內部的干擾.從而說明對于快、慢動態耦合的系統,奇異攝動分解方法和擾動觀測器能夠快速有效地達到期望控制,同時提高系統的穩定性.
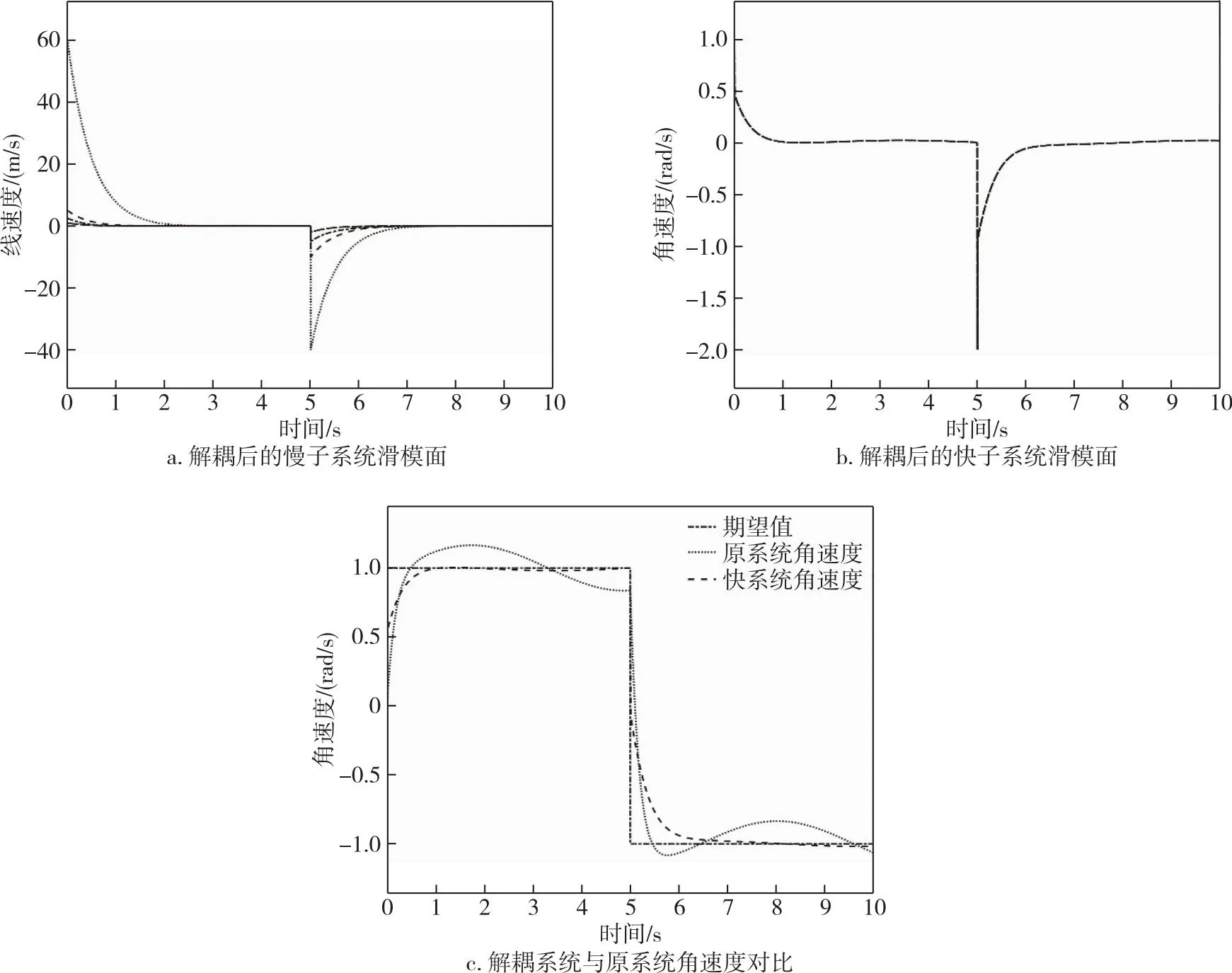
圖4 帶擾動觀測器的快系統與未解耦原系統滑模控制角速度輸出仿真對比Fig.4 Simulation comparison of angular velocity output of sliding mode control between fast system with disturbance observer and uncoupled original system
5 結論
針對固定翼無人機速度、姿態的高精度控制,本文采用奇異攝動時標分解方法將固定翼耦合系統分解為慢變的速度回路和快變的角速度回路,同時對解耦后的快、慢系統分別設計基于非線性干擾觀測器的改進滑模控制方法.仿真結果表明:本文提出的方法有效地減少了滑模控制所產生的抖震現象,提高了固定翼無人機系統的抗干擾能力;對于采用時標分解解耦的無人機系統,時標分解技術能夠降低控制器設計的復雜性和提高系統控制的精度.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
