自動移液系統的設計與實現
2023-12-18 08:58:04杜勝宇趙子愷饒賓期王棟益
現代電子技術 2023年24期
關鍵詞:系統
杜勝宇, 趙子愷, 饒賓期, 黃 哲, 王棟益
(中國計量大學 機電工程學院, 浙江 杭州 310018)
0 引 言
在現代生物學實驗、化學實驗中,液體的處理起著核心作用[1]。實驗室的液體樣品制備步驟非常耗時、繁瑣且重復,對通量、精準度和效率有比較高的要求[2]。精確的液體處理是必不可少的操作。傳統的手動移液方式需要操作員用手動移液槍把樣本液體從源試管移到目標試管中,操作效率較低而且容易引入實驗誤差,造成樣本液體的污染,在需要處理大量樣本液體的場景下無法滿足快速準確的要求[1-3]。因此,自動移液系統的開發和應用成為化學分析和生物醫學實驗的研究熱點。自動移液系統可以實現自動化移液操作,不僅可以提高操作效率和準確性,還可以大大降低實驗操作的難度和復雜度。李增設計了以機械臂為主要結構的全自動移液工作站,集成化程度高,提高了移液效率,但系統較為復雜,移液精度不夠高[4];魏翱翔設計了基于STM32F1系列芯片、步進電機、傳感器和移液泵等的全自動移液工作站,移液效率高,同時還實現了對系統壓力的監測,但是缺乏對移液狀態的監測[5]。李錦赫設計了微流量移液工作站,移液精度高,人機交互性強,但目前只針對銀基催化的高通量移液工作,兼容性不夠好[6]。
本文提出了一種以ESP32 為主控方案,使用步進電機組帶動移液槍和掃碼器進行移液和掃碼操作,使用安卓上位機進行系統的邏輯控制和人機交互。對步進電機控制算法進行研究,實現了步進電機多軸聯動和速度規劃,提高了系統穩定性和移液精度。
1 系統整體框架設計
1.1 移液系統設計
移液系統架構圖如圖1 所示,整個系統分為嵌入式硬件平臺、機械設備和嵌入式軟件系統三部分。
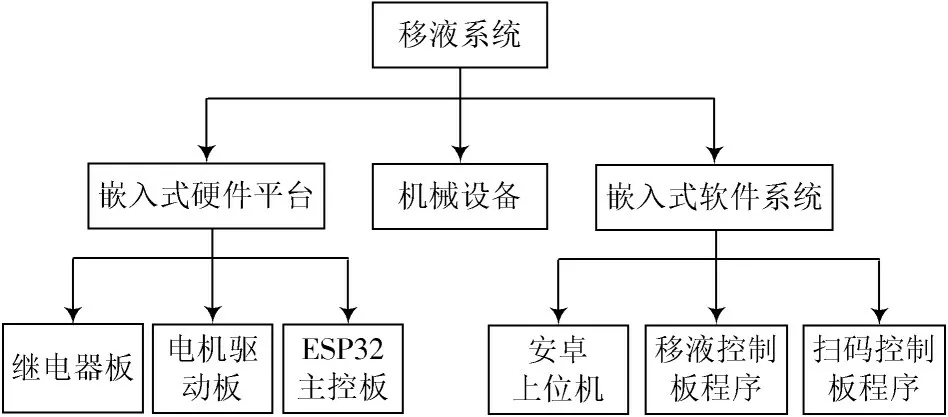
圖1 移液系統架構
1.2 機械結構設計
自動移液系統的機械結構如圖2 所示,整個系統的機械結構分為移液部分和掃碼部分,移液部分主要有源試管架、槍頭架、目標試管架、廢料盒、xyz三軸步進電機和移液槍等部件;掃碼部分主要有xy兩軸步進電機和掃碼器等部件。
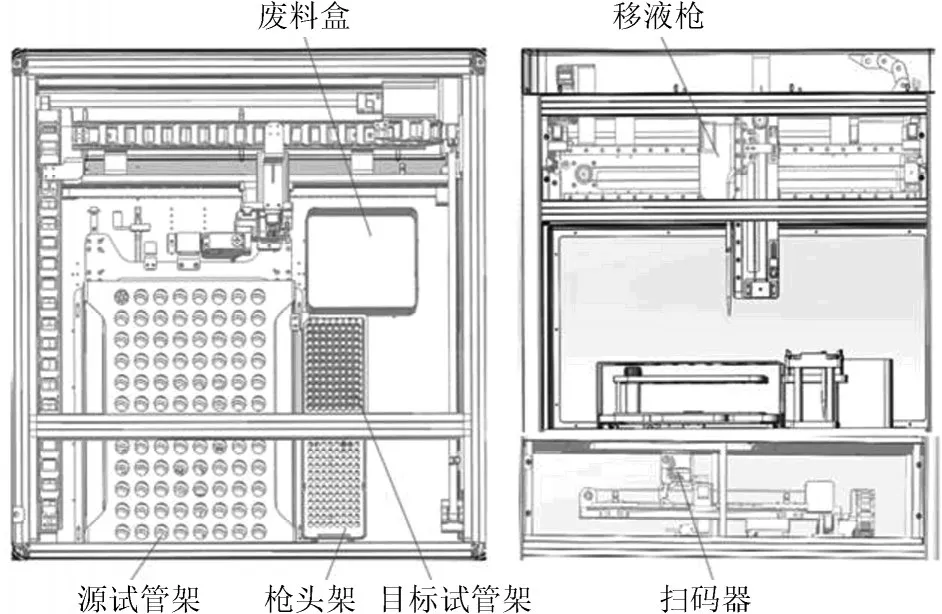
圖2 自動移液系統機械結構
1.3 嵌入式硬件平臺設計
圖3 所示為嵌入式硬件平臺的結構框圖,移液系統的嵌入式硬件部分主要包括ESP32 主控板、電機驅動板、繼電器板。ESP32 主控板是嵌入式硬件平臺的核心,負責處理系統中的各種信息;電機驅動板驅動步進電機轉動,從而帶動移液槍和掃碼器移動到指定位置進行移液和掃碼操作;繼電器板則是用來控制一些外接設備的通斷,比如照明燈帶、紫外線燈等設備。

圖3 嵌入式硬件平臺結構框圖
2 自動移液系統工作流程
自動移液系統工作流程如圖4 所示,安卓上位機創建掃碼工單,通過超文本傳輸協議(Hyper Text Transfer Protocol, HTTP)把工單傳輸給負責掃碼部分的ESP32主控板,其解析工單數據得到需要掃碼的源試管的位置,驅動步進電機把掃碼器帶到指定位置進行二維碼掃描操作,待所有二維碼掃描完畢,把二維碼信息和坐標信息關聯后打包,通過HTTP 協議上報給安卓上位機。安卓上位機通過人機界面把掃描的二維碼信息展示給用戶,根據用戶的選擇來創建移液工單,并通過HTTP協議下發移液工單給移液部分的ESP32 主控板,其解析工單數據得到移液步驟,驅動xyz三軸步進電機和移液槍執行相應的步驟,每完成一個步驟給安卓上位機上報一組移液的數據包。

圖4 自動移液系統工作流程
3 自動移液系統嵌入式硬件平臺
3.1 ESP32 主控板
ESP32 主控板主要包括ESP32 核心電路、RS 485 電路、輸入/輸出(Input/Output, I/O)擴展電路和限位開關等。圖5 所示為ESP32 主控板原理框圖,ESP32 是一款由樂鑫科技(Espressif Systems)開發的低功耗、高性能的無線保真(Wireless Fidelity, WiFi)和藍牙雙模系統芯片[7]。移液系統選擇ESP32 作為主控核心的主要原因是其內置高性能WiFi,便于和安卓上位機進行通信。ESP32 主控板采用了低功耗技術,可以長時間穩定運行,支持多種睡眠模式[8],不足之處是I/O 口較少,用來作為移液系統的核心控制器I/O 口資源比較緊張,所以該移液系統采用I/O 擴展電路實現ESP32 I/O 口的擴展。
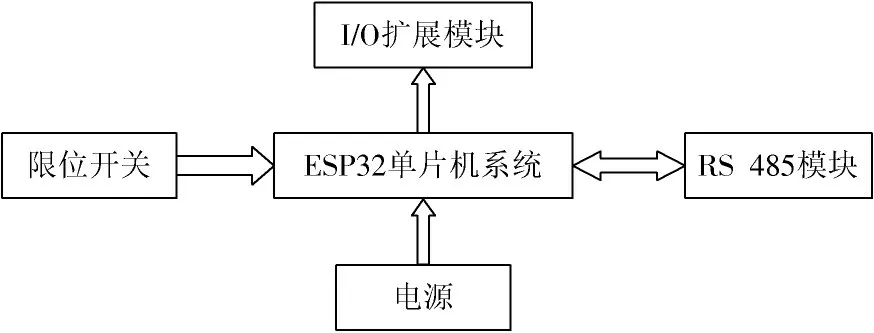
圖5 ESP32 主控板原理框圖
圖6 所示為ESP32 控制板的I/O 擴展電路圖,采用了74HC595D 芯片實現I/O 口擴展功能。74HC595D 是8 位串行輸入、8 位并行輸出的移位寄存器,它可以將串行輸入的數據轉換為并行輸出,通過這種方式實現擴展I/O 口的目的。
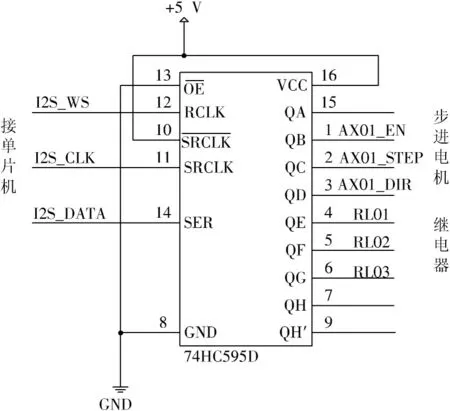
圖6 I/O 擴展電路圖
RS 485 模塊電路圖如圖7 所示,RS 485 通信硬件設計簡單、應用廣泛[9],它是一種串行通信協議,可以實現多個設備之間的通信,采用半雙工的通信方式,同一時刻數據只能向一個方向流動,所以數據的發送和接收不能同時進行。它還可以實現多點通信,在一條RS 485總線上可以連接多個地址不同的設備。由于RS 485 使用兩條相互獨立的傳輸線,通過兩條線的電平差來傳遞數據,所以具有良好的抗干擾能力。
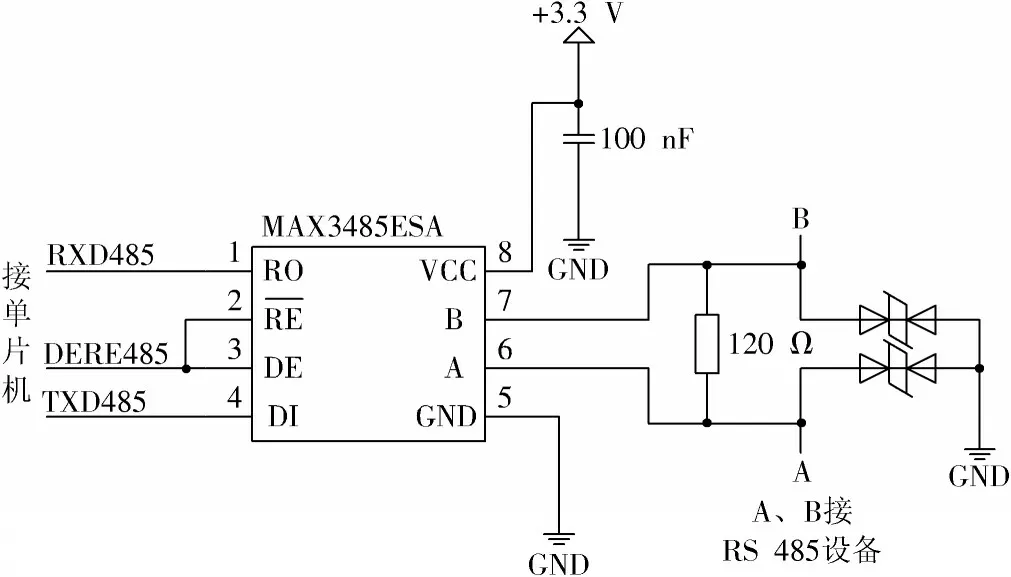
圖7 RS 485 模塊電路圖
除上述模塊,ESP32 主控板還提供了限位開關接口,作為移液系統的邊界標識點。限位開關可以檢測步進電機是否到達預定位置或者已經超過最大位置,從而保障移液系統的穩定運行。
3.2 電機驅動板
電機驅動板提供兩路步進電機的控制,可以通過撥碼開關調節電流、步進電機細分等。該電路采用了TMC2160-TA 這款高性能的步進電機驅動芯片,圖8 為該芯片的引腳圖,它支持1 256 步進分辨率,可以實現高精度的步進控制。在實現高精度的基礎上,它可以輸出4 A 的大電流來驅動更高功率的步進電機,具有過流、過壓等保護,提高了移液系統的安全性。

圖8 TMC2160-TA 引腳圖
3.3 繼電器板
繼電器板主要實現了多路的繼電器輸出,可以控制一些外圍開關設備的通斷,其中一路繼電器電路圖如圖9 所示。
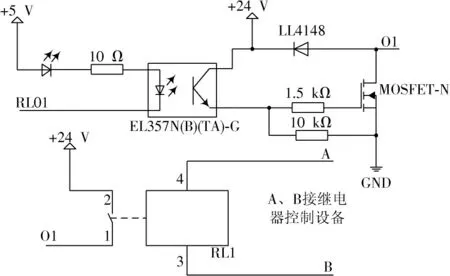
圖9 一路繼電器電路圖
4 自動移液系統嵌入式軟件系統
4.1 ESP32 主控板程序
ESP32 主控板移液程序流程如圖10 所示,程序進行一系列的初始化后,在主循環中等待安卓上位機的下發指令,根據指令選擇功能驅動步進電機轉動。步進電機的控制是ESP32 主控板程序的關鍵,其中最重要的是步進電機的速度規劃和多軸聯動。
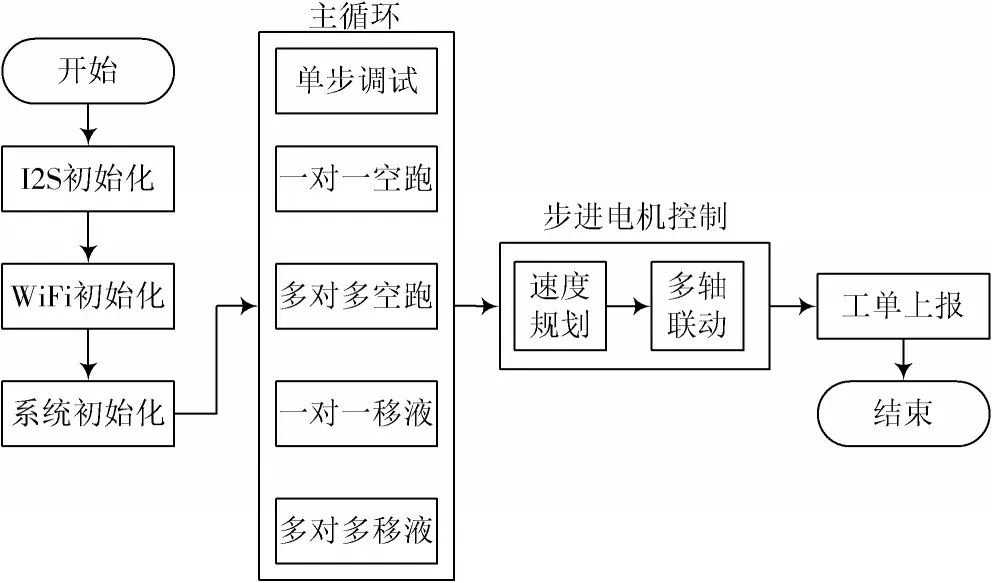
圖10 移液程序流程
4.1.1 速度規劃
自動移液系統對步進電機的控制精度和穩定性有比較高的要求,它需要步進電機能夠穩定、準確地把移液槍和掃碼器移動到指定的位置,從而進行掃碼和移液操作。如果步進電機出現失步情況,就會造成掃碼器讀不到對應的二維碼信息或者移液槍吸液、吐液不準確的問題,甚至會對移液槍和掃碼器產生不可逆的損傷。對步進電機進行速度規劃可以解決這些問題,由于成本和硬件資源的限制,本系統使用開環的方式控制步進電機的速度,主要對步進電機的加減速過程進行研究。常見的速度規劃算法有梯形加減速算法、拋物線加減速算法、五段式S 曲線加減速算法和七段式S 曲線加減速算法[10-11]。根據表1 中速度規劃算法的對比以及ESP32 硬件資源的限制,本文系統選擇五段式S 曲線加減速算法來進行速度規劃。
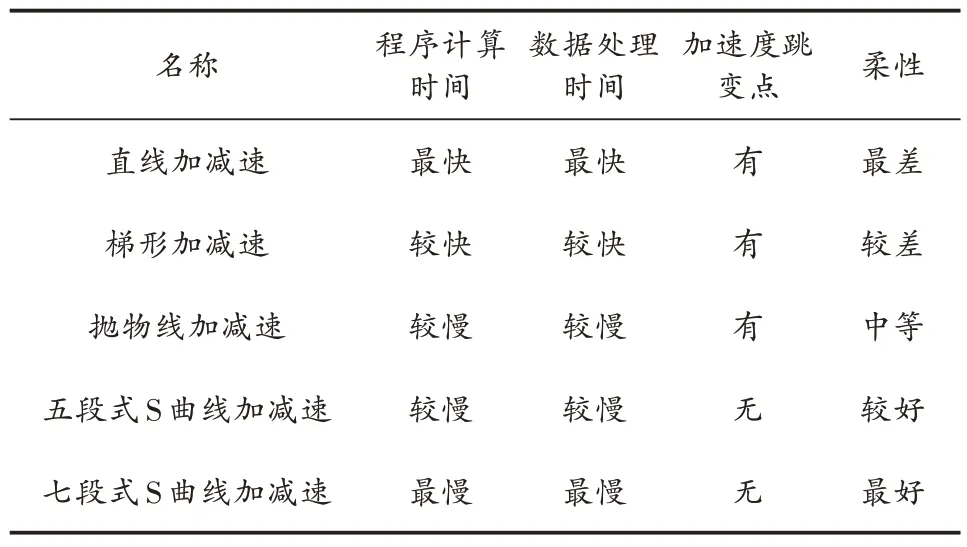
表1 速度規劃方法對比
圖11 所示是五段S 曲線加減速的特性曲線,其中T1為加加速階段,T2為減加速階段,T3為勻速階段,T4為加減速階段,T5為減減速階段。五段S 曲線加減速具有對稱特性,所以可以得到T1=T2,T4=T5。
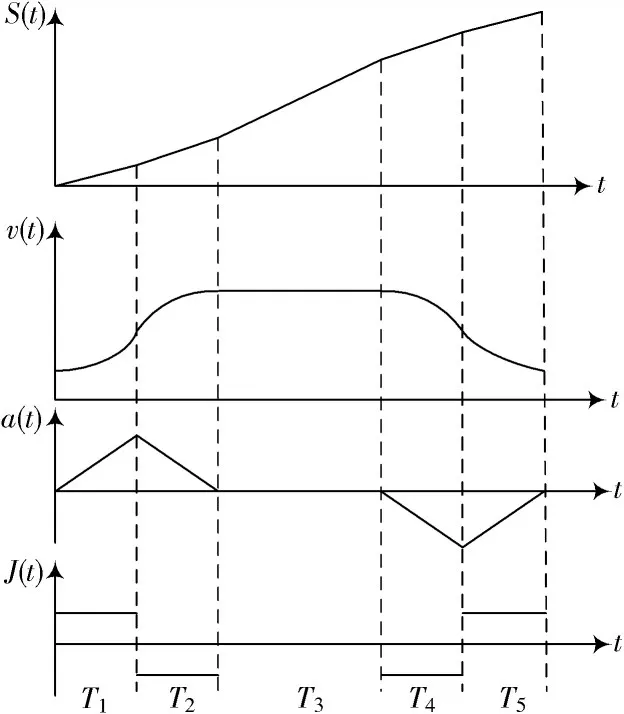
圖11 五段S 曲線加減速算法特性曲線
在進行S 曲線加減速過程中,起點速度記為vs,加加速度記為J,可以得到加加速度-時間、速度-時間、加速度-時間和路程-時間的關系式為:
如式(1)~式(4)所示,只要確定T1、T3、T4的值,上述公式的所有值都可以確定。在自動移液系統的步進電機速度控制過程中,初速度和末速度是相同的,加速過程和減速過程互為倒序,所以加速過程和減速過程的時間可以看成是一致的,能夠得到T1=T4。加加速度、最大加速度、最大速度以及距離都是人為設定的已知量,通過這些參數就可以得到T1、T3、T4的值,從而得到整個五段式S 曲線加減速過程的速度。距離設置為20 m,最大速度設置為10 m/s,最大加速度設置為20 m/s2,最大加加速度設置為30 m/s3,采用Matlab 對五段S 曲線加減速過程進行仿真,得到的距離-時間、速度-時間、加速度-時間和加加速度-時間曲線如圖12 所示。
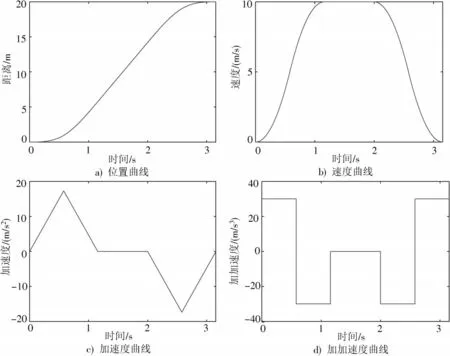
圖12 五段式S 曲線加減速算法仿真曲線
4.1.2 多軸聯動
自動移液系統涉及到多軸步進電機,其中移液部分有xyz三軸步進電機,掃碼部分有xy兩軸步進電機。傳統方法往往是把各軸的步進電機進行單獨的控制,先控制x軸電機轉動,再控制y軸電機轉動,最后控制z軸電機轉動。該方法控制效率低下,不符合自動移液系統高效率、高精度的步進要求,所以本文提出一種基于布雷森漢姆(Bresenham)直線算法的多軸電機聯動算法。
在計算機圖形學中,Bresenham 直線算法被廣泛用于位圖圖像中繪制直線[12],由Jack E.Bresenham在1962年發明。這個算法相比于其他直線算法,例如數值微分算法和中點畫線法,具有更快的速度和更小的計算成本。該算法的基本思想是從起點開始逐個選擇直線上離目標點最近的像素點進行繪制。在繪制過程中,利用差分算法來計算直線的路徑,規避除法運算,從而得到精確的結果[13]。
根據直線斜率,可以得到以x軸步進或y軸步進為基準的初始直線,如圖13 所示。斜率k的絕對值|k|<1,同時假設步長為1,在畫直線時,當前的點是(xi,y)i,第i+1 個位置可能是(xi+ 1,y)i或(xi+ 1,yi+ 1),這取決于yi和yi+ 1 與實際y坐標的距離,選取近的作為第i+1 個位置[14]。

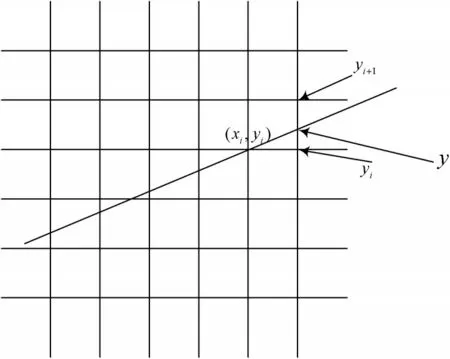
圖13 初始直線示意圖
首先設直線的方程為y=kx+b,yi和實際y的距離為d1:式中k是不確定的變量,它可能引入浮點數從而增加計算難度。直線的起始坐標和終點坐標值已知,所以通過起始坐標和終點坐標值可以得k=dy dx。
為了消除浮點數的影響,將式(7)左右兩邊同乘以dx可以構建一個pi,公式如下:

基于式(10),可以用循環迭代來計算pi的值,代入起始坐標點可以得到p1= 2dy-dx,最終得出:
把式(11)和式(12)結論應用到步進電機組上就可以達到多軸聯動的目的。Bresenham 算法程序流程如圖14 所示。
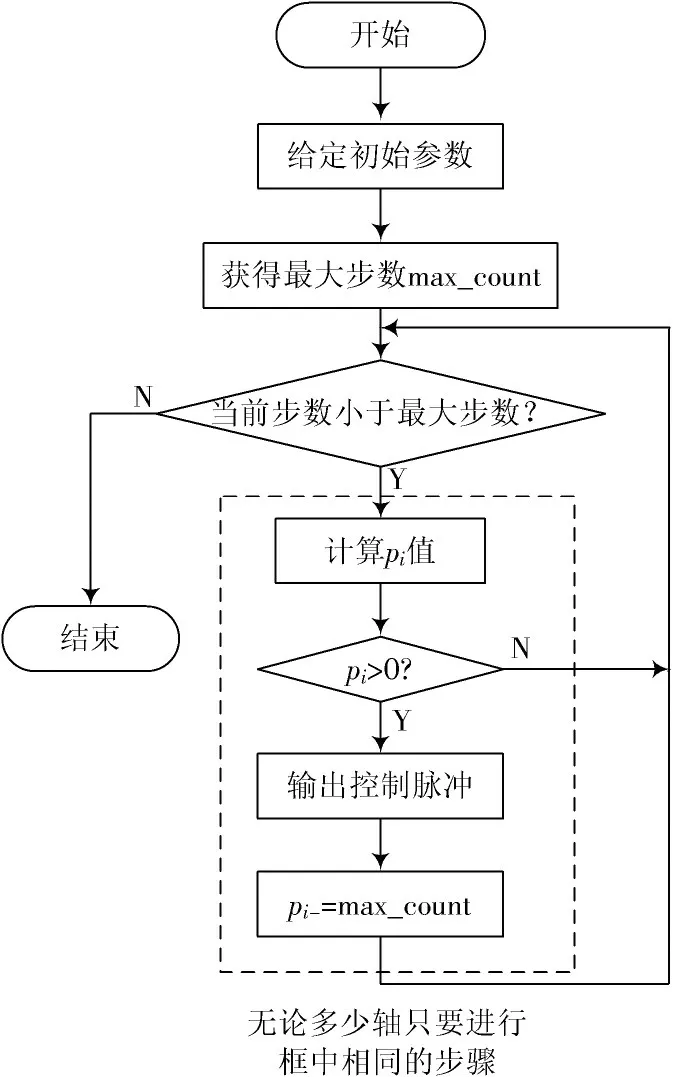
圖14 Bresenham 算法程序流程
用移液部分的xyz三軸來舉例,假設初始位置為(1,2,3),目標位置是(20,8,9),此時步長最大的軸為x軸電機,所以運用上述Bresenham 算法x軸步進1 步,y軸和z軸電機不步進或者步進1 步。圖15 為Matlab 對該過程的仿真軌跡,其中實線為使用Bresenham 算法插補后的軌跡,虛線則為未進行插補的初始直線軌跡。
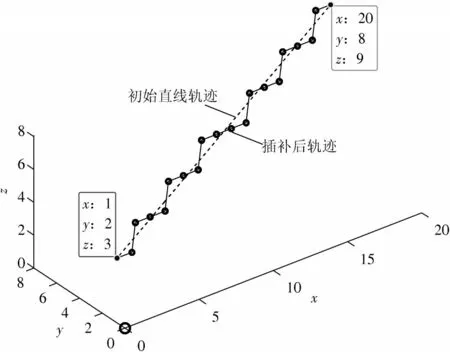
圖15 Bresenham 算法直線插補軌跡
4.2 安卓上位機
安卓上位機使用Java 語言和XML 語言進行開發,開發環境是Idea 搭建的安卓開發環境。
上位機主要有主界面、工單界面、移液槍調試界面和系統調試界面,如圖16 所示,主要實現一對一移液模式、多對多移液模式、空跑、單步調試和工單導出等功能。使用HTTP 協議和ESP32 控制板進行通信,是自動移液系統的控制核心。

圖16 安卓上位機界面
5 自動移液系統實驗研究
自動移液系統使用的移液槍為ADP1000,它是一款高精度的微量移液模塊。為驗證本文設計系統的合理性,使用自動移液系統進行移液實驗,測試條件為:在室溫下使用純凈水作為待測溶液,選擇200 μL 的槍頭,分別進行50 μL 和100 μL 的移液實驗各10 組,其中每種容量分別使用底部吸液模式和液面探測、液面跟隨吸液模式,每次實驗后更換槍頭。采用如下步驟來進行測試:
1) 移液槍初始化;
2) 一次回吸空氣;
3) 吸液;
4) 二次回吸空氣;
5) 吐液;
6) 退槍頭。
使用圖17 所示的TP-214 高精度電子天平來測試吐液量,每次測試前先對深孔板進行稱重,使用此重量作為標準,完成實驗后再進行稱重得到實際的吐液量。表2 所示為移液實驗所測得的數據。
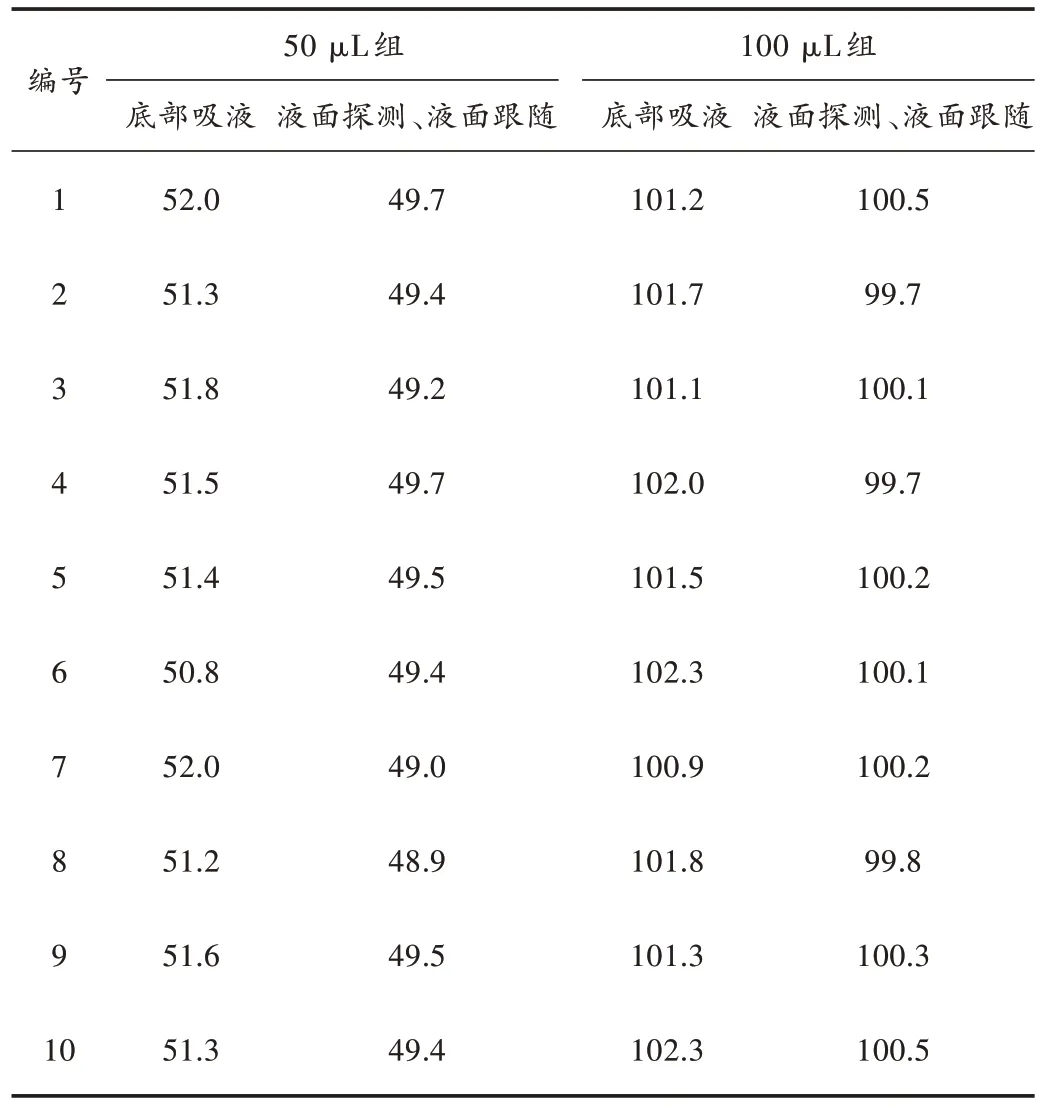
表2 移液實驗數據
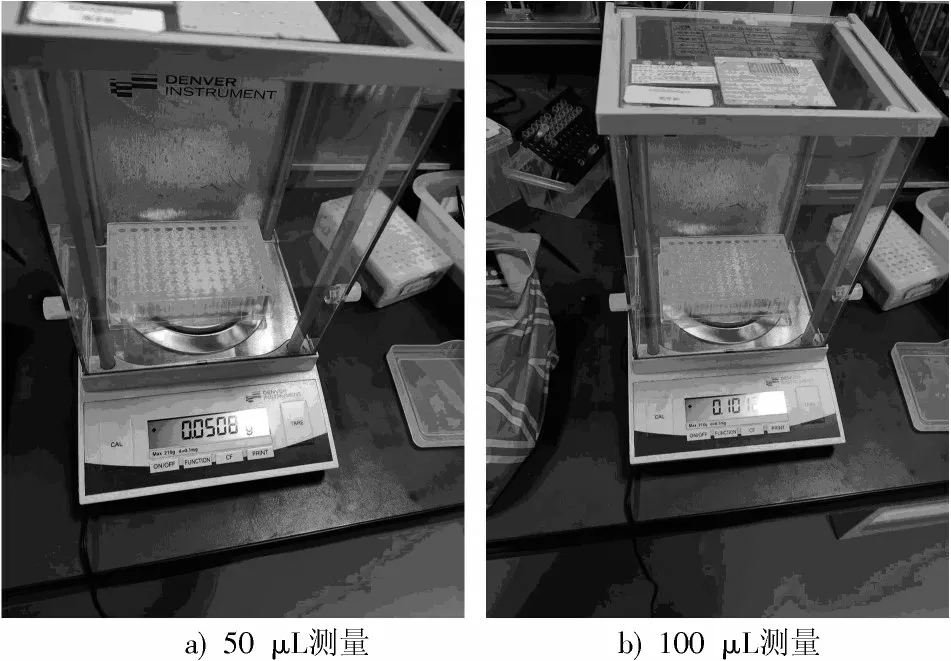
圖17 電子天平測量圖
使用這4 組數據分別計算準確性A和精密度CV,準確度和精密度的公式如下:
式中:Cavg表示每組10 個數據的平均值;Cmax表示每組數據的最大偏差值;SD 表示標準差。
計算數據如表3 所示。實測發現4 組測試結果的準確性都小于2.00%,精密度均滿足0.75%的要求;使用液面探測、液面跟隨測試的數據組的準確性和精密度都好于底部吸液數據組,這是由于底部吸液槍頭側壁容易掛液,所以吐液容量相比正常設置的吐液量會偏大。

表3 計算數據
6 結 語
本文從機械設備、嵌入式硬件平臺和嵌入式軟件系統這三部分介紹了自動移液系統的設計。嵌入式硬件平臺主要是ESP32 主控板、電機驅動板和繼電器板,嵌入式軟件系統主要是安卓上位機和ESP32 主控板程序。本文使用Bresenham 直線算法和五段S 曲線加減速算法來控制步進電機組,實現了步進電機多軸聯動和平滑加減速,提高了系統移液的效率和精度。最后通過移液實驗驗證了本文系統的可行性。
后續主要從兩個方面對本文系統進行研究:一方面進行更多的移液實驗,根據結果對移液系統進行更深入的研究,進一步提高移液精度;另一方面,完善人機交互的細節,添加自動移液過程中出現異常情況的報警機制。
注:本文通訊作者為趙子愷。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32