基于自適應擾動觀測器的PMSM模型預測電流控制
2023-12-20 03:32:50金愛娟張勁松李少龍
包裝工程 2023年23期
關鍵詞:系統
金愛娟,張勁松,李少龍
基于自適應擾動觀測器的PMSM模型預測電流控制
金愛娟,張勁松,李少龍
(上海理工大學,上海 200093)
為了實現包裝自動化生產線的高性能控制,針對永磁同步包裝驅動電機在模型預測電流控制中對擾動敏感性較大的問題,設計一種基于自適應擾動觀測器的模型預測電流控制策略。利用預測誤差設計一種自適應擾動觀測器,對系統遭受的內部和外部的不確定擾動,擾動觀測器估計總擾動并以電流的形式進行補償。將系統的瞬態過程和穩態過程分別進行考慮,設計一種含有動態權重因子的新型損失函數。通過MATLAB/SIMULINK仿真表明,與傳統的控制方法相比,文中方法可以保持瞬態下的高速動態響應和穩態下的低電流紋波,并在應對參數失配和負載突變等問題上,展現了更好的穩態性能和抗干擾能力。文中方法可以有效提升系統動態性能和魯棒性,使改進后系統更加適用于包裝機的應用場景。
永磁同步電機;自適應方法;擾動觀測器;動態權重因子
未來五年是全面建設社會主義現代化國家開局起步的關鍵時期,包裝印刷業也正在走向高質量發展的重要轉型階段。包裝驅動電機作為包裝生產傳動裝置中的核心驅動設備,如何有效地優化其性能指標,成為包裝行業邁向高質量發展階段的重要突破口。永磁同步電機(PMSM)憑借其功率密度大、效率高、控制性能好等優點[1],使其作為驅動設備被廣泛應用于自動化包裝生產線,例如輸送帶、旋轉器和封口機等,其性能指標很大程度上影響著生產效率以及產品質量。近年來,隨著微處理器的快速發展,有限集模型預測控制成為PMSM驅動系統最有前途的控制技術之一,因為其無須調制技術的輔助,具有更快的動態響應能力,可以有效地處理多目標協調和非線性目標[2]。一般來說,模型預測轉矩控制(MPTC)[3]和模型預測電流控制(MPCC)[4-5]是2種常見的MPC形式。由于轉矩的測量在實際包裝生產過程中存在一定難度,所以本文采用適用范圍更廣的MPCC方案。然而驅動電機的MPCC控制策略高度依賴于模型參數,并且在應對外部擾動時的控制效果往往比較欠佳,但在實際包裝生產過程中,環境溫度或濕度的變化以及電機內部結構磨損老化,都會造成電機內部固定參數的改變。同時,包裝驅動電機的外部擾動主要來自于電網電壓的波動以及包裝生產線中負載變化,例如在液體產品的自動化包裝生產線中,在灌裝的過程中其負載會發生改變,并且其變化是極其快速的。因此需要通過采取相應的改進方案來應對包裝過程中的負載突變,以確保生產線的穩定運行和產品質量的穩定性。為了使MPCC控制策略更加有效地應用于包裝驅動電機,如何在充分保持MPCC高速動態特性優勢的同時,提高其應對擾動時的魯棒性成為優化驅動電機性能指標的重要研究方向。
為了解決上述不利因素帶來的影響,國內外涌現了大量的方法,其中,比較經典的一種策略是通過建立擾動觀測器[6-9]來提高MPCC應對擾動時的魯棒性。隨著控制理論的發展,擾動觀測器的形式也變得多樣,例如有Luenberger擾動觀測器[7]、滑模擾動觀測器[8]和擴展狀態觀測器[9]等。Mohamed等[10-11]提出了一種具有自適應內部模型的控制方案,利用Lyapunov函數推導出自適應律,通過內部模型的輸出與實際輸出之間誤差的積分來進行干擾估計。王立俊等[12]將自適應內模觀測器引入MPCC系統,用于估計系統擾動并實時補償,但其自適應增益都為固定值。本文根據預測誤差值設計了自適應可變增益,以盡可能減少參數失配對擾動估計的準確度帶來的不良影響。
此外,針對MPCC方法中的損失函數,許多學者的研究都集中于采用智能算法對損失函數中的權重因子進行在線尋優,例如模糊方法[13]、粒子群優化算法[14]和神經網絡算法[15]等,以提高系統自適應調節能力。其忽略了對損失函數本身的探究,Liu等[16]提出了一種具有比例積分形式的損失函數策略,可以有效消除系統產生的穩態誤差。但是積分環節的引入,必然會對系統的響應時間造成影響,尤其是瞬態過程的響應時間。為了有效克服這一問題,本文針對系統不同的運動狀態,設計不同的損失函數,并通過速度誤差函數使其在不同狀態之間實現平滑過渡。
通過對上述文獻研究分析,為了有效提高包裝驅動電機MPCC系統的魯棒性,提出一種含有可變自適應增益的擾動觀測器,利用預測誤差估計系統總擾動并進行前饋補償以校正輸出。針對系統不同的運行狀態,本文設計一種含有動態權重因子的損失函數,將系統瞬態過程和穩態過程分別進行考慮,既要保持瞬態中的快速動態響應,還要保證穩態下的低電流紋波。通過仿真實驗表明,本文提出的復合型MPCC方案較傳統的MPCC系統具有更強的魯棒性和穩態響應性能。
1 傳統MPCC算法
1.1 含有擾動項的PMSM數學模型
為了便于控制器的設計,忽略鐵芯的鐵損和磁體渦流損耗等因素,在同步旋轉坐標系(軸)建立含有集成擾動項的表貼式PMSM數學模型為:
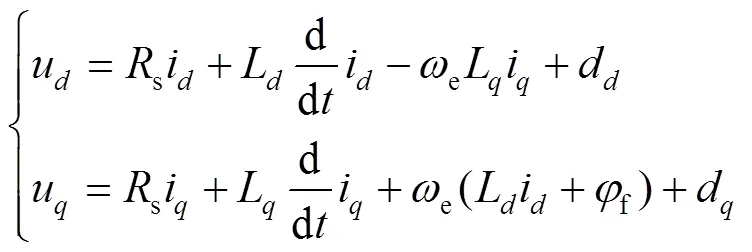
式中:u、u分別為軸定子電壓;i、i分別為軸定子電流;L、L分別為軸的定子電感,對于表貼式PMSM定子電感滿足L=L=Ls;s為定子電阻;e為轉子的電角速度;f為永磁體磁鏈;d、d為由參數不匹配和未建模動力學模型引起的總擾動,可以由式(2)表示。
式中:ε、ε為模型中的不確定參數項;st?s,?L=Lst?s,fft?f,ststft為實際參數值,ssf為標稱參數值。
對于離散時間模型,下一個時刻的電流i(1)(,)預測模型表示如下:
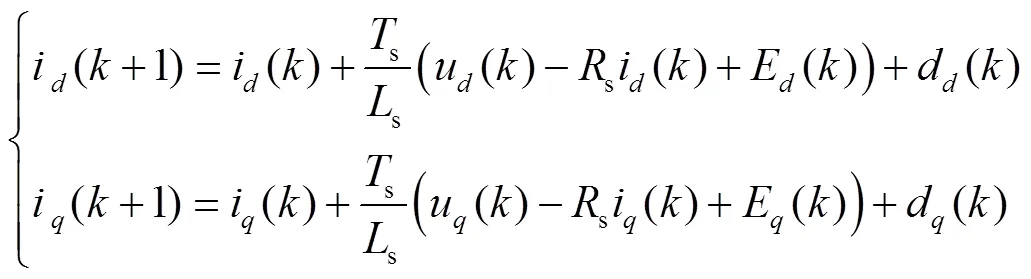
式中:E()e()si()、E()e()si()?e()f分別為軸反電動勢在時刻的值;u()和u()分別為-軸電壓在時刻的值;i()和i()分別為-軸電流在時刻的值;s為采樣周期;i(1)和i(1)分別為-軸電流在下一個采樣時刻的預測值。
1.2 PMSM兩電平電壓源逆變器電流控制方案
MPCC選擇電流作為控制變量,通過損失函數篩選出最優電壓矢量使預測電流值盡可能地跟蹤參考電流值。以兩電平電壓源逆變器(2L-VSI)為例,其8種開關狀態組合產生8個電壓空間向量組合,包括6個非零向量和2個零向量,將其映射到復平面得到電壓空間矢量,見圖1。
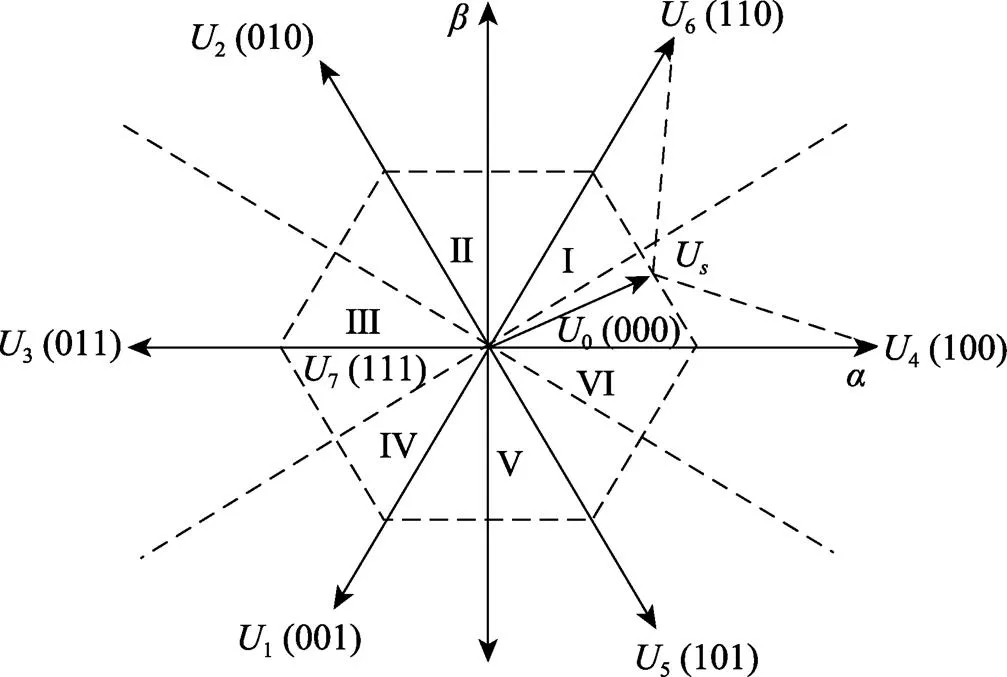
圖1 2L-VSI電壓空間矢量圖
在獲得預測值后,通過式(4)中的損失函數來確定最佳電壓矢量,最終得到傳統MPCC的結構如圖2所示。

2 自適應擾動觀測器
通常認為在MPCC系統中面對的主要擾動是由參數不匹配、未建動力學模型以及突然變載而產生的,其可以被認為是總擾動,利用擾動觀測器估計并結合前饋補償從而有效地消除電流靜態誤差。
2.1 擾動觀測器的建立
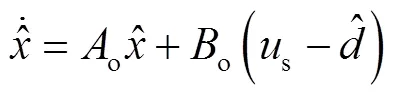
本文擾動觀測器的建立引用Mohamed等[11]提出的內部模型。為了便于推導擾動估計的自適應律,將式(1)的系統方程重新描述為式(5)。

根據式(5)建立系統狀態估計方程為:
用式(5)減去式(6),得到系統實際采樣電流和預測電流之間的誤差方程為:
為確保狀態預測誤差和擾動估計誤差收斂為0,建立Lyapunov函數為:

式中:為需要設計的自適應增益;為Lyapunov方程的唯一對稱正定解,表示見式(9)。

求對時間的導數,并將式(7)帶入化簡得到:
圖2 傳統MPCC結構
Fig.2 Traditional MPCC structure
針對本文所適用離散控制系統,式(11)的離散形式表示為:

2.2 可變自適應增益的設計
通過分析式(12)可知,若要得到估計擾動,需要準確的電感參數值。實際上,由于磁飽和現象,會產生電感失配的現象。為了緩解這一問題,使其估計值在任何狀態下都能夠快速收斂,在離散狀態下對自適應增益()進行設計。

其中,1>0,2>0是所需要設計的常系數,0<<1是所需要設計的冪指數,>0為固定擾動估計增益。
對其分析可知,如果估計誤差的絕對值足夠大時,表示系統內部可能發生參數失配或者受到強烈的外部干擾,此時1||1+γ起主導作用,2||1?γ其值接近于零,利用冪函數型增長的快速性使擾動估計值快速收斂。當估計誤差的絕對值足夠小時,僅使用1||1+γ時函數存在局限性,需要通過2||1-γ來平衡配置,使系統在估計誤差較小時也可以快速收斂。隨著系統進入穩態,估計誤差減少到零時,此時()=0,擾動觀測器不再估計擾動,并補償電流進入前向通道,系統隨之平穩運行。
2.3 系統穩定性分析
本節提出的自適應方法需要選擇適當的自適應增益,以保證系統的穩定性。因為MPCC為離散控制系統,所以在離散狀態下定義Lyapunov函數為:

對求離散狀態的導數,并化簡得到收斂條件必須滿足為:

結合式(5)、式(6)以及式(12),可以得到:

將式(16)代入式(15)得到:

為了滿足穩定性的條件,得到自適應增益()的取值范圍為:
式中:P=diag(p1, p2);ho=Ts/Ls,與采樣周期和定子電感有關。所設計的自適應擾動觀測器可以根據電流預測誤差進行在線補償,并且結構簡易,更容易在離散控制系統中實現,其結構如圖3所示。
3 基于動態權重因子的新型損失函數
傳統模型預測電流控制的損失函數計算簡易,但針對不同的應用場景,需要選擇合理的控制目標。為了保持瞬態中的快速動態響應和穩態下的低電流紋波,對瞬態過程和穩態過程分別進行考慮,以產生2種不同的軸電流基準,一種作為瞬態基準以保持快速動態響應,另一種作為穩態基準以確保低電流紋波。并且,將上一小節的擾動估計值結合到損失函數內,本文提出了一種含有動態權重因子的新型損失函數。
3.1 瞬態q軸電流損失函數
為了保持MPCC瞬態過程具有快速動態響應的優點,繼續沿用傳統MPCC的參考電流策略,利用PI控制器根據速度誤差生成參考電流i*,同時,將上一節求得的擾動估計值前饋補償到參考電流,則瞬態軸電流損失函數定義為以下形式:

由于MPCC通過離散形式實現,因此,將式(19)進行離散化處理如下:

3.2 穩態q軸電流損失函數
由于p是由短期預測產生的,若持續使用其預測值,則無法解決穩態下的電流紋波問題。為了提高穩態時電流控制性能,增強系統應對擾動時的魯棒性,引入電流跟蹤誤差的積分環節,將損失函數設計為PI形式,其表達式為:
同樣,將式(21)進行離散化如下:
因為集成擾動的信息包含在電流跟蹤誤差中,通過引入積分作用可以有效消除穩態電流跟蹤誤差,減少電壓矢量切換次數,從而降低穩態時電流紋波。并且,由于積分作用的存在,還可以降低高頻采樣下量化噪聲的產生的負面影響。
將上述2種狀態有機結合,所設計的新型損失函數表示為式(23)的形式。
3.3 損失函數的說明
首先,本文提出的損失函數對瞬態過程和穩態過程的權重因子分別設計。m為速度誤差函數,用作軸瞬態損失函數m的動態權重因子,隨系統狀態實時更新。給予軸穩態損失函數s一個固定的權重因子s。同時,使軸電流與軸電流達到同等的控制效果,將m和s之和設置為W的權重因子。在瞬態過程中,m遠大于s,因此m和W在電壓矢量選擇中起決定性作用。穩態過程中,速度誤差極小,m遠小于s,此時電壓矢量選擇主要取決于s和W。由于速度誤差不斷收斂到零,軸損失函數可以在m和s之間非常平滑地過渡。與固定權重的損失函數相比,避免了靠經驗設置權重因子的缺陷,同時可以實現MPCC瞬態下高速動態響應和穩態下的低電流紋波。
將自適應擾動觀測器與含有動態權重因子的新型損失函數充分結合,得到改進后系統MPCC整體結構如圖4所示。
4 仿真實驗分析
為了驗證所提出的控制方法的可行性和控制效果,根據系統整體結構圖3,在MATLAB/Simulink搭建相應的仿真模型。文中將通過以下2種實驗充分模擬永磁同步包裝驅動電機在不同的工況時的動態性能和魯棒性,并將改進后的方案與傳統的MPCC的控制效果進行對比分析。
1)變載工況實驗。本實驗驗證包裝機在空載啟動時的動態響應性能,以及模擬在包裝生產線中發生負載突變的情景,通過對比實驗來驗證改進后系統的抗干擾能力和魯棒性能。在不考慮參數失配的條件下,電機以給定轉速2 000 r/min轉動,0.25 s時突加負載8 N·m,在0.4 s時卸載。
2)參數失配實驗。包裝機在實際生產過程中會因環境溫度或濕度的變化以及電機內部結構磨損老化,從而導致內部機械參數變化。本實驗通過配置內部參數失配來模擬包裝機在實際生產中的狀態。需要指出的是,電阻參數不匹配的影響在MPCC[17]中相對較小。因此,在本組實驗中主要考慮包裝機內部定子電感和永磁體磁鏈的不確定性。
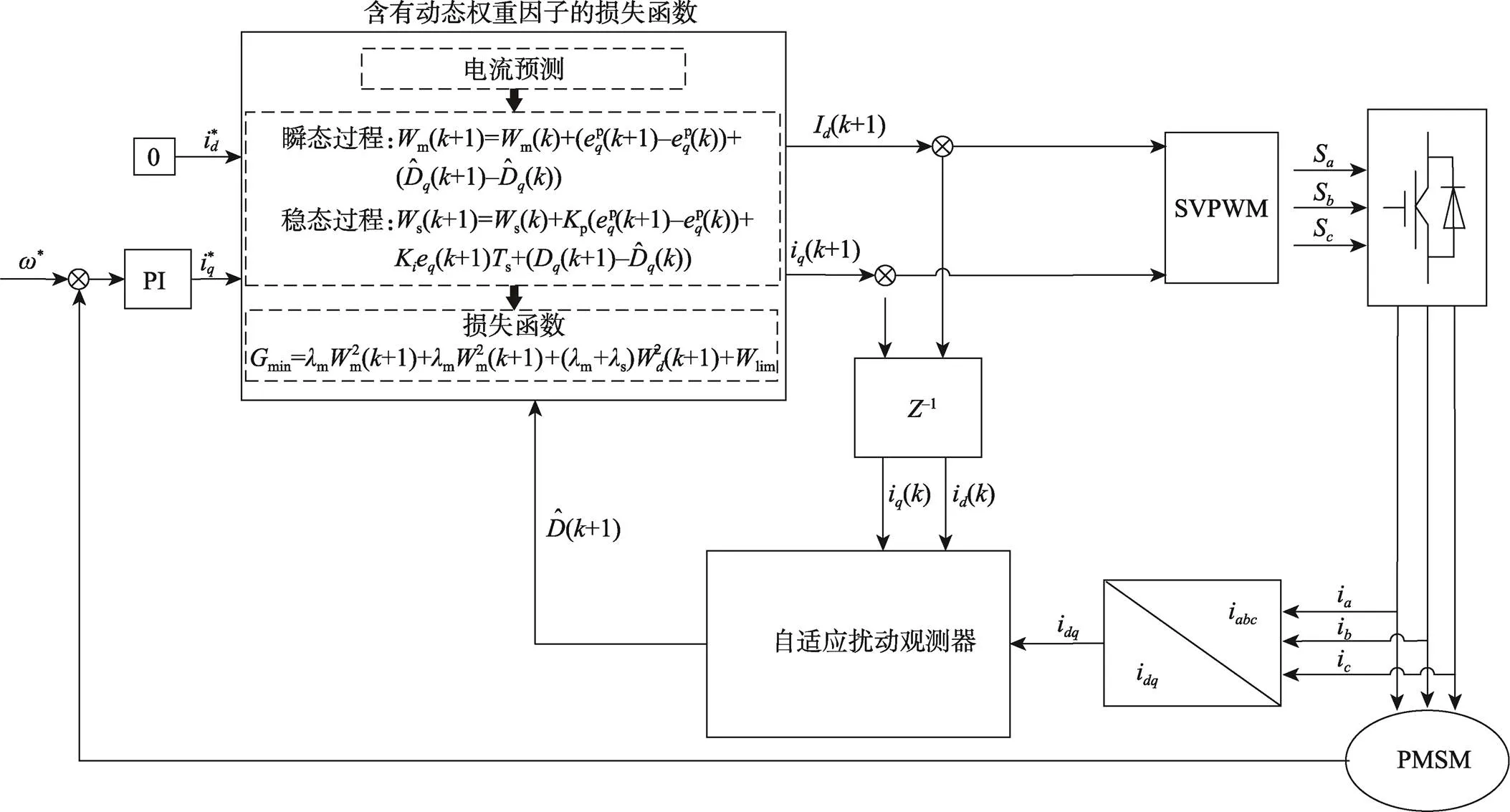
圖4 基于自適應擾動觀測器改進型MPCC系統結構
本文仿真實驗采用的永磁同步包裝機其參數如下:極對數=3,直流母線電壓Uc=300 V,定子電感s=5.25 mH,定子磁鏈f=0.182 7 Wb。同時,對改進模型中的固定參數項進行配置,自適應擾動觀測器中1=6.3、2=8.6、=0.57、=0.07;損失函數中p=2.8、i=9.3、s1。
4.1 變載工況實驗
在不考慮參數失配的條件下驗證本文所提出的方案應對突變負載時的魯棒性,將電機以恒定轉速2 000 r/min空載啟動,0.25 s時負載突加至8 N·m,在0.4 s時負載突降至0 N·m。該實驗仿真結果如圖5所示,性能指標見表1。
對電機的空載啟動過程進行分析,通過觀察圖5a中的局部放大圖可發現,其快速響應的優點得到了很好的保持。這是由于在啟動過程中,m對損失函數起決定性作用,所以響應時間基本接近于傳統的MPCC。
通過圖5b可看出,在瞬態階段尤其是剛起步階段,軸電流的紋波較大,其主要是由短期預測誤差造成的,通過所設計的自適應擾動觀測器,可以根據預測誤差從而有效的補償電流值,使電流紋波大大降低。進入穩態時,s對損失函數起決定性作用,由于預測誤差大大降低,自適應擾動觀測器幾乎不再補償電流進入前向通道,此時穩態的電流紋波主要由損失函數中的積分項解決。通過本文所提出方案的改進,通過圖5a可知,進入穩態后的轉速抖振會明顯降低。通過圖5c可知,軸的電流紋波得到了顯著降低,因此自適應擾動觀測器與動態損失函數的充分結合,對MPCC的控制性能有不錯的提升。
同時,對MPCC系統面對負載突變的過程進行分析。結合表1的數據可知,在突然加載時,改進型MPCC的轉速峰值降低了0.94%,調節時間縮短了70.8%。在突然減載時,改進型MPCC的轉速峰值降低了0.62%,調節時間縮短了71.9%。從圖5a中的局部放大圖可以明顯看出,無論是在突然加載還是減載的情況下,改進后MPCC受負載突變的影響遠遠小于傳統MPCC。這得益于擾動觀測器的存在,面對突然變載時,可以快速估計出電流所需的補償值,通過計算將補償的電流值附加到本文設計的損失函數中,篩選出更加合適的電壓矢量,從而應對突然變載對系統的惡劣影響。不僅如此,在穩態性能方面,突然加載和減載時的穩態誤差分別減小了81.2%和82.1%,這得益于在穩態時的損失函數中引入積分環節,使系統可以更加平穩的運行。

圖5 變載工況實驗
表1 變載實驗仿真性能指標對比

Tab.1 Comparison of variable load experimental performance indicators
4.2 參數失配實驗
在本小節的實驗中,將電機的給定轉速均設置為2 000 r/min,讓電機以空載狀態啟動,在0.25 s時給予系統負載轉矩為8 N·m。通過與傳統MPCC的對比實驗,以驗證改進后MPCC系統的參數魯棒性。
4.2.1 定子電感失配
為了驗證改進后方案的參數魯棒性,將定子電感值設置為標稱值的50%、75%、200%,其運行結果如圖6所示。通過觀察圖6a可知,傳統的MPCC在應對75%電感失配時,其-軸電流紋波會明顯增大,這得益于自適應擾動觀測器的作用。由圖6b得知,改進后MPCC的電流紋波會明顯下降。通過觀察圖6c可知,在應對50%電感失配時,尤其在0.25 s增加負載后,傳統MPCC的電流會產生嚴重的毛刺現象,此時已經喪失對系統的控制能力。由圖6d可知,改進后的MPCC面對50%電感失配時,依然展現了較強的魯棒性。同樣,當電感失配值大于標稱值,為標稱值的200%時,通過觀察圖6e和圖6f可知,改進后的MPCC與傳統方案的MPCC相比,電流紋波也會得到明顯改善。
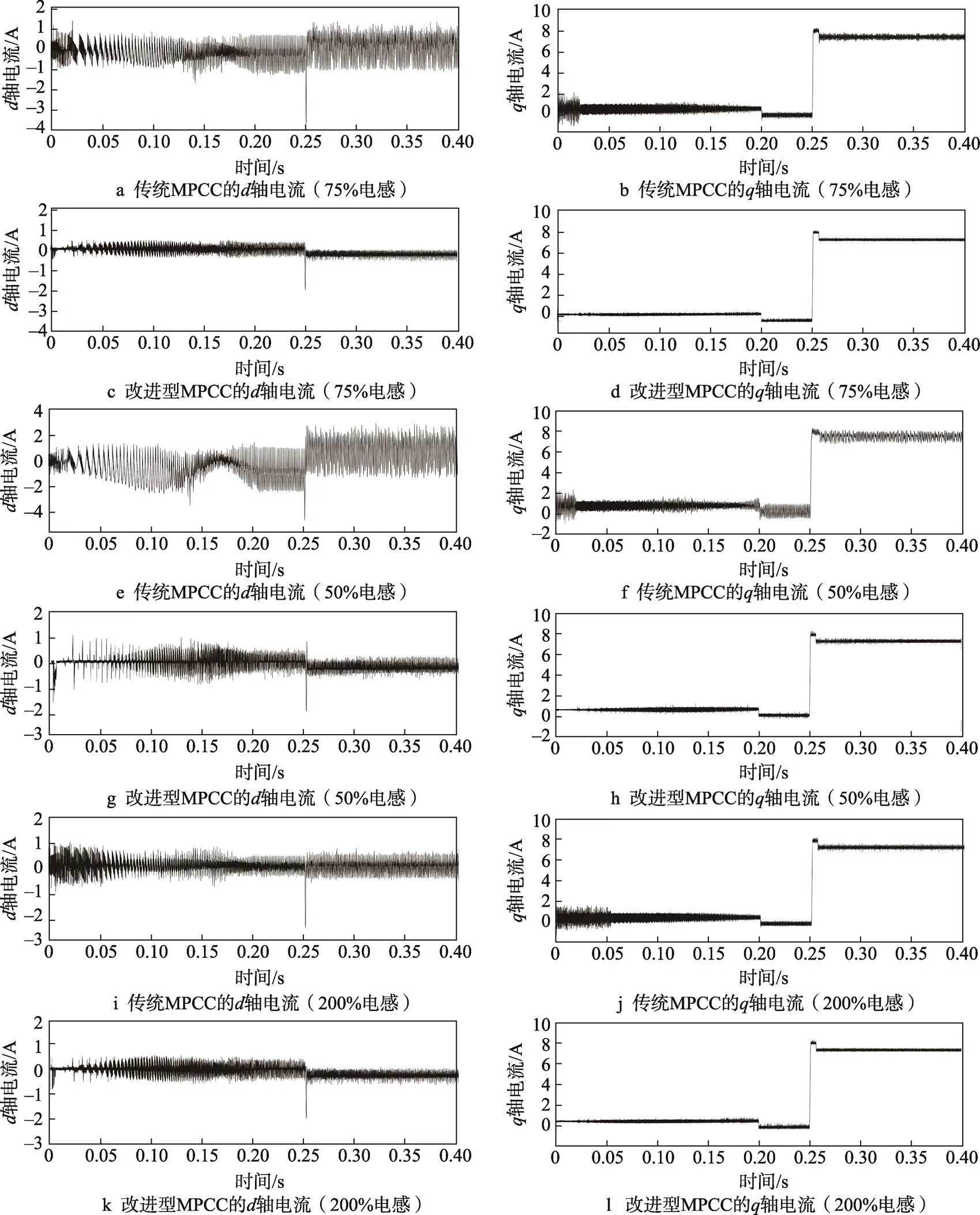
圖6 電感失配實驗
4.2.2 永磁體磁鏈失配
除定子電感之外,永磁體磁鏈也會隨電機運動狀態改變而產生變化,將磁鏈值設置為標稱值的65%、200%時,其運行結果如圖7所示。經過多次實驗,當永磁體磁鏈值為標稱值的65%及以下時,觀察圖7a可知,傳統MPCC的軸電流在增加負載后,無法收斂到參考電流,則系統的輸出扭矩將不能滿足負載需求,達到最大永磁體磁鏈失配的最小值。當磁鏈值為標稱值的200%時,觀察圖7c可知,傳統MPCC的軸電流在增加負載的瞬間,會產生一個劇烈的向上沖擊電流,從而超出系統的峰值扭矩。由圖7d可知,改進后MPCC的控制效果受永磁體磁鏈失配的影響會明顯降低。
4.2.3 3種主要參數失配
為了充分驗證所提出方案的優越性,使其更能適應極端惡劣的實際工況環境,考慮定子電感、定子電阻、永磁體磁鏈同時失配的條件下進行實驗。設置s=5s、s=0.5s和f=1.8f,其仿真結果如圖8所示。觀察圖8a可知,當傳統的MPCC應對多參數同時失配時,-軸電流會在增加負載后產生劇烈的電流振蕩。然而觀察圖8b可知,改進后的MPCC系統在面臨此情況時,-軸電流的性能仍可以保持準確且較低的電流紋波。
通過以上3種參數失配情況的仿真結果表明,與傳統的MPCC相比,改進后的MPCC系統顯示出更加平穩的電流響應。充分驗證了改進后系統具備極強的參數魯棒性,使電機可以在各種工況下更加平穩高效的運行。

圖7 永磁體磁鏈失配實驗
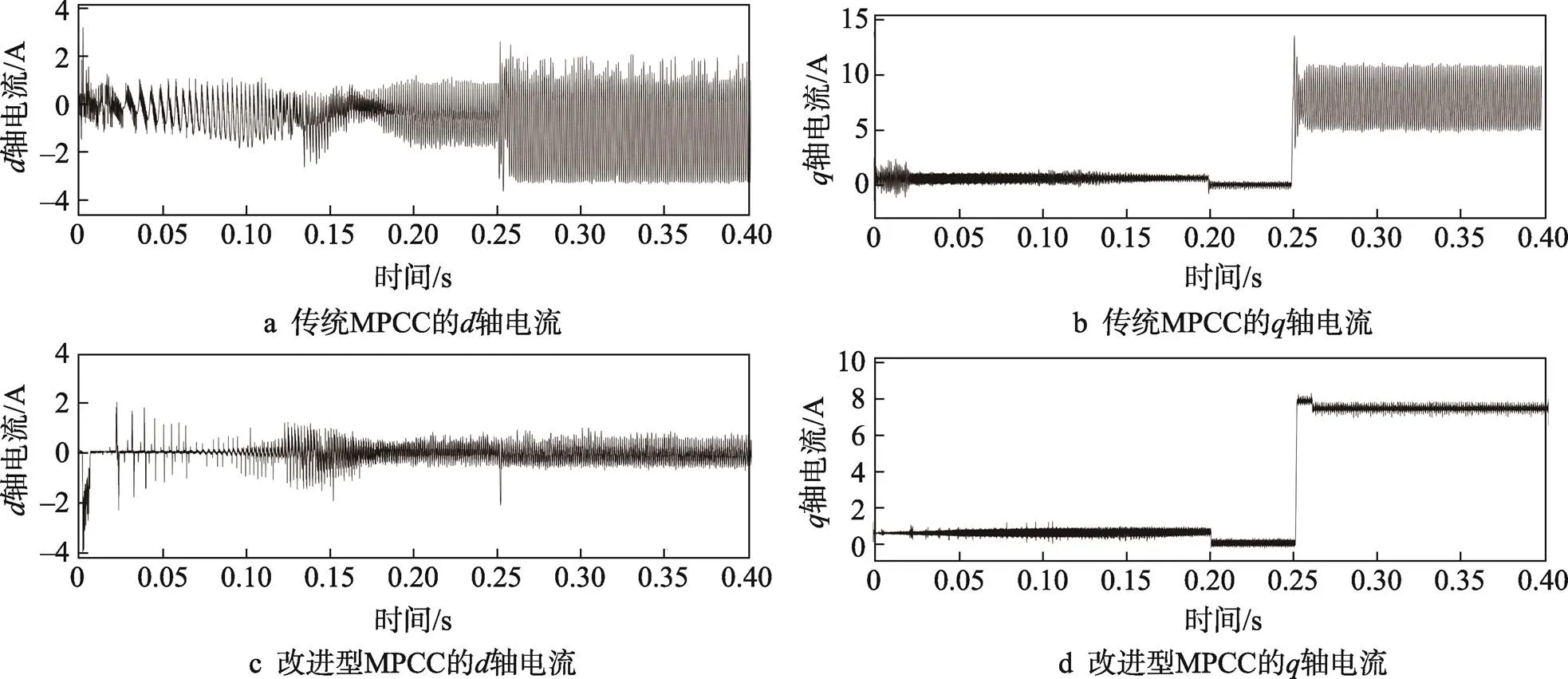
圖8 3種參數失配實驗
5 結語
本文主要針對永磁同步包裝機MPCC控制系統,在應對內部參數失配以及負載突變時魯棒性差的問題,提出了一種基于擾動觀測器的改進型MPCC控制方案。首先,通過設計自適應可變增益擾動觀測器,利用當前預測誤差在線估計出電流所需的補償值,并將系統的瞬態和穩態過程分別進行考慮,通過動態權重因子將2種系統狀態有機的結合,再引入擾動觀測器估計的電流補償值,構成了一種新型損失函數。通過仿真果表明,本文所提出的改進型MPCC系統既能夠在有效應對包裝機因環境或者內部結構老化造成的內部參數失配現象及外部變載問題的同時,還能夠保持MPCC高速動態特性的優點。文中方法對MPCC控制策略在永磁同步包裝機上的應用有著借鑒意義。
[1] 秦艷忠, 閻彥, 陳煒, 等. 永磁同步電機參數誤差補償-三矢量模型預測電流控制[J]. 電工技術學報, 2020, 35(2): 255-265.
QIN Yan-zhong, YAN Yan, CHEN Wei, et al. Three-Vector Model Predictive Current Control Strategy for Permanent Magnet Synchronous Motor Drives with Parameter Error Compensation[J]. Transactions of China Electrotechnical Society, 2020, 35(2): 255-265.
[2] LI Teng, SUN Xiao-dong. Improved Model Predictive Robust Current Control for Permanent Magnet Synchronous Hub Motor[C]// 2021 IEEE International Conference on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), IEEE, 2021: 147-151.
[3] 馮凌, 付建國, 廖麗誠, 等. 一種改進的永磁同步牽引電機低開關頻率模型預測直接轉矩控制策略[J]. 中國電機工程學報, 2021, 41(21): 7507-7516.
FENG Ling, FU Jian-guo, LIAO Li-cheng, et al. An Improved Model Predictive Direct Torque Control Strategy for Permanent Magnet Synchronous Traction Motor with Low Switching Frequency[J]. Proceedings of the CSEE, 2021, 41(21): 7507-7516.
[4] YOUNG H A, PEREZ M A, RODRIGUEZ J. Analysis of Finite-Control-Set Model Predictive Current Control with Model Parameter Mismatch in a Three-Phase Inverter[J]. IEEE Transactions on Industrial Electronics, 2016, 63(5): 3100-3107
[5] YUAN Xin, ZHANG Shuo, ZHANG Cheng-ning.. Improved Model Predictive Current Control for SPMSM Drives with Parameter Mismatch[J]. IEEE Transactions on Industrial Electronics, 2020, 67(2): 852-862.
[6] 王艷, 劉旭東. 基于擾動補償的永磁同步電機預測位置控制[J]. 控制工程, 2022, 29(5): 828-836.
WANG Yan, LIU Xu-dong. Predictive Position Control of Permanent Magnet Synchronous Motor Based on Disturbance Compensation[J]. Control Engineering of China, 2022, 29(5): 828-836.
[7] XIA Chang-liang, WANG Meng, SONG Zhan-feng, et al. Robust Model Predictive Current Control of Three-Phase Voltage Source PWM Rectifier with Online Disturbance Observation[J]. IEEE Transactions on Industrial Informatics, 2012, 8(3): 459-471.
[8] 趙凱輝, 戴旺坷, 周瑞睿, 等. 基于擴展滑模擾動觀測器的永磁同步電機新型無模型滑模控制[J]. 中國電機工程學報, 2022, 42(6): 2375-2385.
ZHAO Kai-hui, DAI Wang-ke, ZHOU Rui-rui, et al. Novel Model-Free Sliding Mode Control of Permanent Magnet Synchronous Motor Based on Extended Sliding Mode Disturbance Observer[J]. Proceedings of the CSEE, 2022, 42(6): 2375-2385.
[9] YANG Ming, LANG Xiao-yu, LONG Jiang, et al. Flux Immunity Robust Predictive Current Control with Incremental Model and Extended State Observer for PMSM Drive[J]. IEEE Transactions on Power Electronics, 2017, 32(12): 9267-9279.
[10] MOHAMED Y A I. Design and Implementation of a Robust Current-Control Scheme for a PMSM Vector Drive with a Simple Adaptive Disturbance Observer[J]. IEEE Transactions on Industrial Electronics, 2007, 54(4): 1981-1988.
[11] MOHAMED Y A R I, EL-SAADANY E F. A Current Control Scheme with an Adaptive Internal Model for Torque Ripple Minimization and Robust Current Regulation in PMSM Drive Systems[J]. IEEE Transactions on Energy Conversion, 2008, 23(1): 92-100.
[12] 王立俊, 趙吉文, 董菲, 等. 基于自適應內模觀測器的永磁同步直線電機高帶寬強魯棒預測電流控制策略研究[J]. 中國電機工程學報, 2019, 39(10): 3098-3106.
WANG Li-jun, ZHAO Ji-wen, DONG Fei, et al. Research on High Bandwidth and Strong Robust Predictive Current Control Strategy of Permanent Magnet Synchronous Linear Motor Based on Adaptive Internal Model Observer[J]. Proceedings of the CSEE, 2019, 39(10): 3098-3106.
[13] 李耀華, 秦輝, 蘇錦仕, 等. 基于模糊控制的動態權重系數表貼式永磁同步電機模型預測轉矩控制系統[J]. 電機與控制應用, 2020, 47(3): 1-7.
LI Yao-hua, QIN Hui, SU Jin-shi, et al. Model Predictive Torque Control of SPMSM with Dynamic Weight Coefficient Based on Fuzzy Control[J]. Electric Machines & Control Application, 2020, 47(3): 1-7.
[14] 梅容魁, 于新紅. 基于PSO的模型預測速度控制權重系數自整定[J]. 微特電機, 2022, 50(5): 42-46.
MEI Rong-kui, YU Xin-hong. Self-Tuning of Weight Coefficients for Model Predictive Speed Control Based on PSO[J]. Small & Special Electrical Machines, 2022, 50(5): 42-46.
[15] MACHADO O, SANCHEZ P, RODRíGUEZ F, et al. A Neural Network-Based Dynamic Cost Function for the Implementation of a Predictive Current Controller[J]. IEEE Transactions on Industrial Informatics, 2017(99): 1.
[16] LIU Xi-cai, ZHOU Li-bing, WANG Jin, et al. Robust Predictive Current Control of Permanent-Magnet Synchronous Motors With Newly Designed Cost Function[J]. IEEE Transactions on Power Electronics, 2020(99): 1.
[17] SIAMI M, KHABURI D A, ABBASZADEH A, et al. Robustness Improvement of Predictive Current Control Using Prediction Error Correction for Permanent- Magnet Synchronous Machines[J]. IEEE Transactions on Industrial Electronics, 2016, 63(6): 3458-3466.
Predictive Current Control of PMSM Model Based on Adaptive Disturbance Observer
JIN Ai-juan, ZHANG Jin-song, LI Shao-long
(University of Shanghai for Science and Technology, Shanghai 200093, China)
The work aims to design a predictive current control strategy of model based on adaptive disturbance observer, in order to realize the high-performance control of the packaging automation production line and solve the problem that the permanent magnet synchronous packaging drive motor is more sensitive to disturbance in the predictive current control of model. Firstly, an adaptive disturbance observer was designed by the prediction error. For the internal and external uncertain disturbances suffered by the system, the disturbance observer estimated the total disturbance and made compensation in the form of current. Moreover, the transient process and steady-state process of the system were considered separately, and a new loss function with dynamic weight factors was designed. The MATLAB/SIMULINK simulation showed that, compared with the traditional control method, the method proposed could maintain high-speed dynamic response in transient state and low current ripple in steady state, and show excellent performance in coping with parameter mismatch and load mutation. It has better steady-state performance and anti-interference ability. The method proposed can effectively improve the dynamic performance and robustness of the system, making the improved system more suitable for the application scenarios of packaging machines.
permanent magnet synchronous motor; adaptive method; disturbance observer; dynamic weighting factor
TB486;TM341
A
1001-3563(2023)23-0171-10
10.19554/j.cnki.1001-3563.2023.23.021
2023-02-13
國家自然科學基金(11502145)
責任編輯:曾鈺嬋
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
