
一種基于工具坐標(biāo)系的機(jī)械臂關(guān)節(jié)結(jié)構(gòu)參數(shù)幾何標(biāo)定方法
2023-12-22 06:47:56梁晗宇杜凱健
裝備制造技術(shù) 2023年10期
梁晗宇,杜凱健
(江蘇平山交通設(shè)施有限公司,江蘇 南京 211500)
0 引言
機(jī)械臂結(jié)構(gòu)較為復(fù)雜,在機(jī)械臂作業(yè)的過程中,關(guān)節(jié)運(yùn)動(dòng)受到了較大的限制,很容易出現(xiàn)故障或失效,影響整個(gè)工序的正常運(yùn)行。針對此類問題,研究人員設(shè)計(jì)了多種結(jié)構(gòu)參數(shù)幾何標(biāo)定方法。其中,基于指數(shù)積的機(jī)械臂關(guān)節(jié)結(jié)構(gòu)參數(shù)幾何標(biāo)定方法與基于混合優(yōu)化算法的機(jī)械臂關(guān)節(jié)結(jié)構(gòu)參數(shù)幾何標(biāo)定方法的應(yīng)用較為廣泛。基于指數(shù)積的機(jī)械臂關(guān)節(jié)結(jié)構(gòu)參數(shù)幾何標(biāo)定方法,主要是結(jié)合旋量理論與指數(shù)積方法,將機(jī)械臂關(guān)節(jié)結(jié)構(gòu)參數(shù)的理論值與實(shí)際值進(jìn)行對應(yīng),建立一種關(guān)節(jié)結(jié)構(gòu)參數(shù)約束條件方程[1]。通過變換坐標(biāo)系,縮小幾何標(biāo)定誤差,實(shí)現(xiàn)機(jī)械臂關(guān)節(jié)結(jié)構(gòu)參數(shù)標(biāo)定。基于混合優(yōu)化算法的機(jī)械臂關(guān)節(jié)結(jié)構(gòu)參數(shù)幾何標(biāo)定方法主要是利用D-H 矩陣,建立關(guān)節(jié)坐標(biāo)轉(zhuǎn)換模型,并針對結(jié)構(gòu)參數(shù)的非線性變換[2]。將最小二乘法與模擬退火算法進(jìn)行混合,實(shí)現(xiàn)結(jié)構(gòu)參數(shù)高效標(biāo)定。以上兩種方法受到空間變換誤差的影響,最終的標(biāo)定結(jié)果與理想值存在一定的差異[3]。因此,本文設(shè)計(jì)一種新的機(jī)械臂關(guān)節(jié)結(jié)構(gòu)參數(shù)幾何標(biāo)定方法。
1 關(guān)節(jié)結(jié)構(gòu)參數(shù)幾何標(biāo)定方法設(shè)計(jì)
1.1 機(jī)械臂關(guān)節(jié)結(jié)構(gòu)姿態(tài)標(biāo)定測量
從姿態(tài)庫中隨機(jī)選取出若干個(gè)標(biāo)定位姿作為初始位姿,通過變換位姿的方式得到結(jié)構(gòu)參數(shù)幾何標(biāo)定位姿組[4]。從姿態(tài)庫中選取需要標(biāo)定的候選位姿組,從中找出標(biāo)準(zhǔn)的標(biāo)定測量姿態(tài),計(jì)算可觀性指標(biāo):
式中,Oi為可觀性指數(shù);δ1、δ2、δl為機(jī)械臂關(guān)節(jié)結(jié)構(gòu)參數(shù)測量姿態(tài)辨識的雅可比值;l為結(jié)構(gòu)參數(shù)的個(gè)數(shù)。選擇最大Oi附加行塊,也就是初始位姿。將初始位姿插入到位姿組中,并從位姿組中剔除一個(gè)姿態(tài),使姿態(tài)組的標(biāo)準(zhǔn)姿態(tài)最大化。當(dāng)增加姿態(tài)與剔除姿態(tài)保持一致時(shí),標(biāo)定測量姿態(tài)不再變化,完成姿態(tài)標(biāo)定測量。
1.2 基于工具坐標(biāo)系標(biāo)定關(guān)節(jié)結(jié)構(gòu)參數(shù)幾何位姿
在姿態(tài)標(biāo)定測量完成之后,根據(jù)結(jié)構(gòu)參數(shù)幾何標(biāo)定位姿建立工具坐標(biāo)系,并將機(jī)械臂關(guān)節(jié)的基坐標(biāo)系作為工具坐標(biāo)系的參考坐標(biāo)系,避免關(guān)節(jié)結(jié)構(gòu)參數(shù)幾何標(biāo)定誤差。工具坐標(biāo)系如圖1 所示。
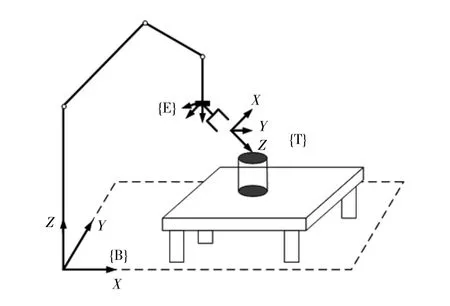
圖1 工具坐標(biāo)系示意
如圖1 所示,{E}為末端坐標(biāo)系;{B}為基坐標(biāo)系;{T}為工具坐標(biāo)系。機(jī)械臂基坐標(biāo)系{B}與機(jī)器臂末端坐標(biāo)系{E}是機(jī)械臂標(biāo)定的重要坐標(biāo)系。{B}能夠作為其他坐標(biāo)系的參考坐標(biāo)系,描述機(jī)械臂關(guān)節(jié)在基坐標(biāo)系的位姿;{E}作為{T}的參考坐標(biāo)系,固定在機(jī)械臂末端,隨著關(guān)節(jié)角度的改變而改變。工具坐標(biāo)系{T}相對于{B}的坐標(biāo)變換表示為:
利用工具坐標(biāo)系,對工具中心點(diǎn)與工具坐標(biāo)系姿態(tài)進(jìn)行標(biāo)定,并根據(jù)標(biāo)定原理進(jìn)行坐標(biāo)系變換,得到:
2 實(shí)驗(yàn)驗(yàn)證
為了驗(yàn)證本文設(shè)計(jì)的方法是否滿足機(jī)械臂關(guān)節(jié)結(jié)構(gòu)參數(shù)幾何標(biāo)定需求,本文對上述方法進(jìn)行了實(shí)驗(yàn)分析。將文獻(xiàn)[1]方法、文獻(xiàn)[2]方法以及本文設(shè)計(jì)方法進(jìn)行對比。
2.1 實(shí)驗(yàn)準(zhǔn)備
圖2 為實(shí)驗(yàn)所用機(jī)械臂。

圖2 實(shí)驗(yàn)所用機(jī)械臂示意
本次實(shí)驗(yàn)隨機(jī)選取出1 組10 個(gè)機(jī)械臂關(guān)節(jié),建立機(jī)械臂待標(biāo)定的位姿庫,將機(jī)械臂在各個(gè)關(guān)節(jié)運(yùn)動(dòng)范圍內(nèi)等間距取5 個(gè)關(guān)節(jié)角度值,角度值之間交叉組合,形成多個(gè)結(jié)構(gòu)參數(shù)。隨機(jī)選取一個(gè)機(jī)械臂關(guān)節(jié)進(jìn)行位姿變換,并將其結(jié)構(gòu)參數(shù)作為初始參數(shù)。使用工具坐標(biāo)系對初始位姿進(jìn)行擬合,以最小位姿數(shù)目為目標(biāo)函數(shù),得出客觀性指數(shù)與機(jī)械臂末端位姿。整個(gè)機(jī)械臂操作的過程中,基坐標(biāo)系、工具坐標(biāo)系的精度要求較高,末端位姿能夠達(dá)到實(shí)驗(yàn)要求,使結(jié)構(gòu)參數(shù)更加有意義。
2.2 實(shí)驗(yàn)結(jié)果
在上述實(shí)驗(yàn)條件下,本文隨機(jī)選取出1~10 共10個(gè)機(jī)械臂關(guān)節(jié),機(jī)械臂關(guān)節(jié)均能夠正常工作。將θ、α作為標(biāo)定效果好壞的指標(biāo),并將文獻(xiàn)[1]方法、文獻(xiàn)[2]方法以及本文設(shè)計(jì)方法的θ、α標(biāo)定值進(jìn)行對比。標(biāo)定結(jié)果中θ、α標(biāo)定值與理想值相差越小,標(biāo)定效果越佳。具體的實(shí)驗(yàn)結(jié)果如表1 所示。
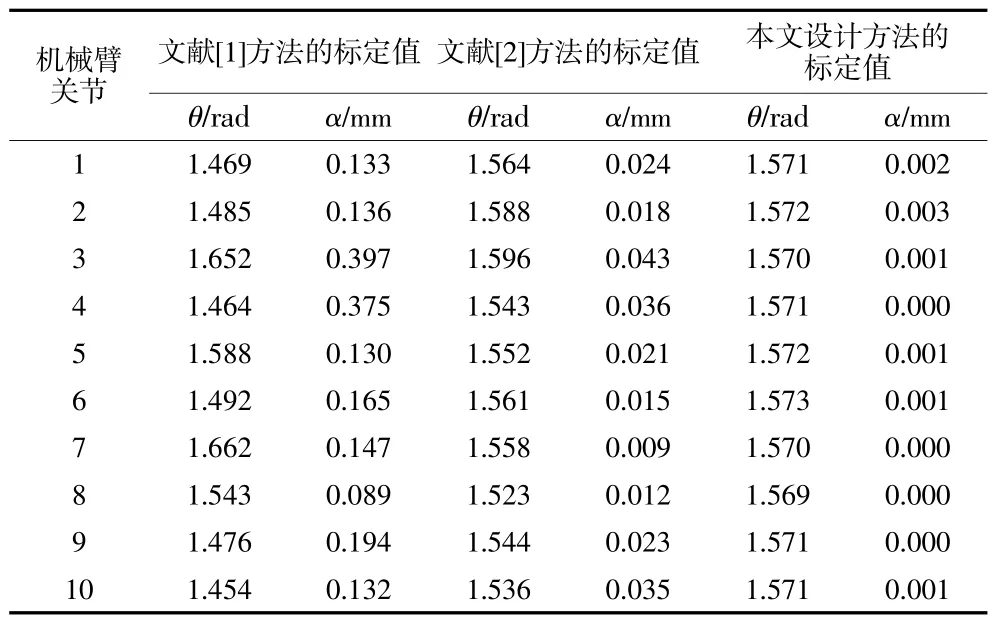
表1 實(shí)驗(yàn)結(jié)果
如表1 所示,θ為機(jī)械臂關(guān)節(jié)角度參數(shù)經(jīng)過標(biāo)定后的測量值;α為機(jī)械臂關(guān)節(jié)長度參數(shù)經(jīng)過標(biāo)定后的測量值。θ的理想值為±π/2(近似為1.571);α的理想值為0 mm。使用本文設(shè)計(jì)方法之后,θ的標(biāo)定值在1.569~1.575 rad 的范圍內(nèi)變化,θ的標(biāo)定值與理想值的誤差在0.000~0.002 rad 的范圍內(nèi)變化,θ的標(biāo)定誤差相對較小;α的標(biāo)定值在0.000~0.004 mm 的范圍內(nèi)變化,α的標(biāo)定值與理想值的誤差在0.000~0.004 mm 的范圍內(nèi)變化,α的標(biāo)定誤差相對較小。而文獻(xiàn)[1]方法和文獻(xiàn)[2]方法的標(biāo)定誤差較大,由此可見,使用本文設(shè)計(jì)的方法標(biāo)定誤差相對較小,幾何標(biāo)定效果更佳,符合本文研究目的。
為了進(jìn)一步驗(yàn)證本文方法的有效性,將位置平行度作為實(shí)驗(yàn)指標(biāo),位置平行度用于評估機(jī)械臂在達(dá)到目標(biāo)位置時(shí)的偏差情況,具體可以通過測量機(jī)械臂末端執(zhí)行器實(shí)際位置與目標(biāo)位置之間的差異來評估,假設(shè)目標(biāo)位置的坐標(biāo)為(0,0,0),則實(shí)際位置與目標(biāo)位置之間的差距如表2 所示。
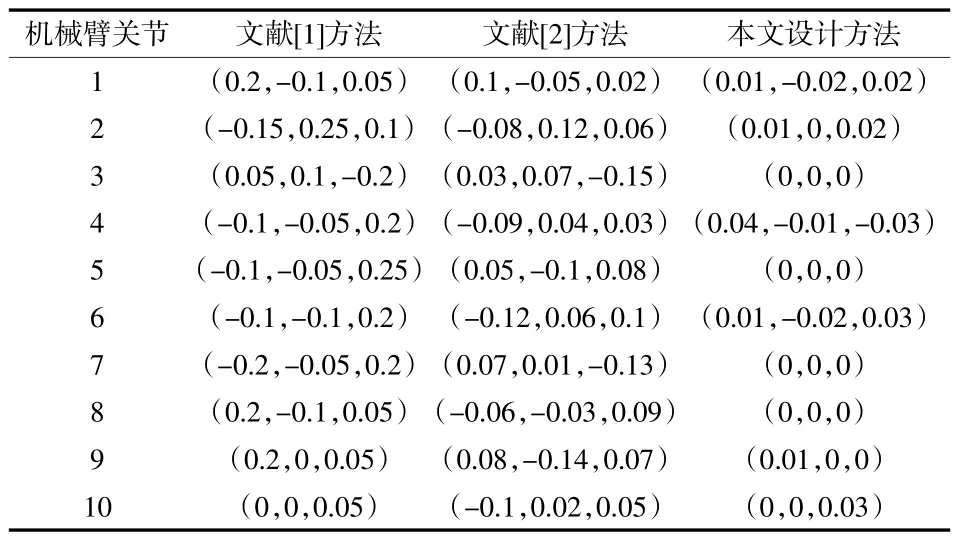
表2 位置平行度實(shí)驗(yàn)結(jié)果
由表2 中的實(shí)驗(yàn)結(jié)果可知,文獻(xiàn)[1,2]方法的標(biāo)定結(jié)果與目標(biāo)位置坐標(biāo)之間的差距較大,而本文方法的標(biāo)定結(jié)果與目標(biāo)位置坐標(biāo)之間的差距較小,說明其標(biāo)定結(jié)果精度較高,有利于優(yōu)化機(jī)械臂關(guān)節(jié)結(jié)構(gòu)參數(shù)的準(zhǔn)確性。
3 結(jié)語
對于機(jī)械臂而言,其結(jié)構(gòu)參數(shù)至關(guān)重要。一個(gè)微小的結(jié)構(gòu)誤差,均會影響機(jī)械臂關(guān)節(jié)的運(yùn)行情況,影響作業(yè)質(zhì)量。因此,本文利用工具坐標(biāo)系,設(shè)計(jì)了機(jī)械臂關(guān)節(jié)結(jié)構(gòu)參數(shù)幾何標(biāo)定方法。從關(guān)節(jié)結(jié)構(gòu)姿態(tài)、標(biāo)定模型、補(bǔ)償標(biāo)定誤差等方面,將機(jī)械臂關(guān)節(jié)結(jié)構(gòu)參數(shù)進(jìn)行測量、辨識、標(biāo)定、補(bǔ)償,降低關(guān)節(jié)運(yùn)動(dòng)誤差,為機(jī)械臂的正常作業(yè)提供保障。
猜你喜歡
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
中華詩詞(2019年7期)2019-11-25 01:43:04
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
意林原創(chuàng)版(2016年10期)2016-11-25 10:28:30
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
科技知識動(dòng)漫(2016年8期)2016-07-29 20:40:09
Coco薇(2016年2期)2016-03-22 02:42:52
兒童故事畫報(bào)·發(fā)現(xiàn)號趣味百科(2015年12期)2016-01-25 00:41:49
Coco薇(2015年1期)2015-08-13 02:47:34
