基于流體力學原理的掃地機器人自動倒垃圾系統
2023-12-22 06:48:30謝文皓成思杰謝蕤宇
裝備制造技術 2023年10期
關鍵詞:風速
謝文皓,成思杰,謝蕤宇
(上海高仙機器人深圳研發部,廣東 深圳 518000)
0 引言
掃地機器人自動倒垃圾系統在現代生活中具有重要意義。隨著人們生活水平的提高和生活節奏的加快,自動化設備的需求逐漸增加。掃地機器人[1]作為智能家居的一部分,已經在家庭和工作環境中得到廣泛應用。然而,傳統的掃地機器人需要人工定期清空塵盒。塞滿垃圾的塵盒容易把手弄臟,也難以一次性倒干凈,塵盒中的海帕積攢的毛發、灰塵也不易清理,容易堵塞掃地機風道,使掃地機無法持續性正常使用。如圖1 所示,常規掃地機器人會搭配一個集塵基站[2]來實現掃地機自動清理垃圾,掃地機啟動以后,就回到集塵基站并自動對接,將塵盒中的垃圾自動吸入集塵基站,實現自動清理垃圾的問題。然而,圖1 產品的系統仍然存在一些局限性。首先,掃地機塵盒中的垃圾無法徹底清理干凈,仍需要手動清理,甚至需要定期水洗才能清理頑固垃圾。其次,若垃圾中存在毛發等,排出時,極易纏繞和堵塞風道。基于此,以滿足用戶的需求,本研究是對自動倒垃圾系統進行改進,并提高其性能和可持續性。主要研究目標是應用流休力學原理開發一種高效且智能的掃地機器人自動倒垃圾系統,提高自動倒垃圾系統的性能,提高掃地機器人自動處理效率的問題,以提高用戶的使用便捷性。

圖1 常規掃地機器人自動倒垃圾系統原理圖
1 流體力學原理在自動倒垃圾系統中的應用
1.1 伯努利原理與應用
伯努利原理[3]是由瑞士科學家丹尼爾·伯努利于18 世紀提出。伯努利原理是流體力學中的基本原理,它描述了在不可壓縮流體中沿流線的速度和壓力之間的關系。它基于一個基本概念,即在不可壓縮流體[4]中,當速度增加時,壓力降低,反之亦然。這個原理可以表達為:
其中,P代表壓力,ρ代表密度,v代表流體的速度,g代表重力加速度,h代表流體的高度。由于在一個流體風道中c值是恒定的,對于高度變化不大的掃地機風道的流體來說,ρ、g、h都是近似不變的,流體速度v增加會導致流體壓力p降低,從而產生壓力差推動垃圾運動。
依據伯努利原理,倒垃圾是否干凈,關鍵在于出塵口附近風速v出是否足夠大,出塵口的氣壓P出是否足夠小。當(P-P出)*S截>fmax時,就能推動灰塵進入出塵口,進入到基站內,如圖2 所示。其中,P代表灰塵顆粒其他方向的氣壓;P出為出塵口的氣壓;S截為灰塵顆粒截面積;fmax為灰塵顆粒的最大靜摩擦力。所以,出塵口附近的風速越大,倒垃圾就會越干凈。
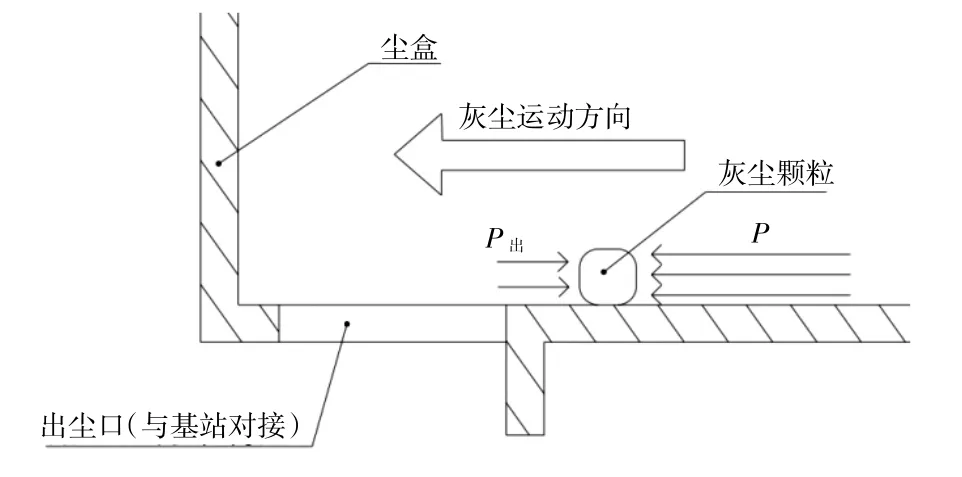
圖2 出塵口附近氣壓減小后可以推動灰塵移動
1.2 旋風吹塵技術的原理與應用
自動倒垃圾系統中的旋風吹塵技術是一項關鍵的創新,它利用流體力學原理實現了高效的垃圾清理和倒垃圾過程。這項技術的基本原理是在塵盒側面增加一個小側門,在倒垃圾時形成一個旋風,將塵盒內的垃圾卷起并排放到集塵基站中。如圖3 所示,各部位具體使用原理如下:
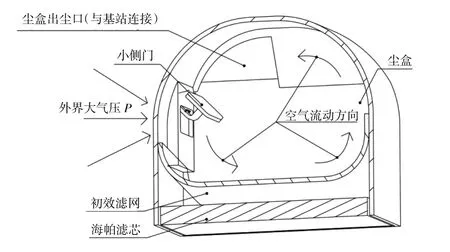
圖3 旋風吹塵塵盒原理圖
集塵基站啟動后,基站的風機會向外界排風,將基站的塵桶、掃地機的塵盒空氣排出,形成負壓。小側門打開形成旋風,塵盒內氣壓小于外界大氣壓P,所以塵盒的小側門就會由于壓力差打開,外界空氣通過小側門高速進入塵盒,導致塵盒底部的空氣流速急劇增加,高速氣流沖擊圓形塵盒壁后形成旋風。
根據伯努利原理,當流體速度增加時,壓力降低。因此,塵盒底部的旋風是塵盒內壓力最低的區域,而其它區域氣壓較高,這就產生了一個壓力差,將塵盒內的垃圾吸入了旋風之中。特別是塵盒死角中的頑固垃圾和可能存在的堵塞物質,如毛發,都能卷起。之后,垃圾將排放到集塵基站,卷起的垃圾隨著旋風的運動被送到塵盒的出塵口附近。由于出塵口截面積小,風速高,氣壓低,垃圾被低氣壓吸出后進入對接好的集塵基站,最后完成了垃圾的倒出和清理過程。
這個過程高效而迅速,自動清理垃圾的頻率僅需每天一次,垃圾排出更干凈徹底。該系統也更好的解決毛發等特殊垃圾難以排出的問題,有效避免了垃圾堆積和堵塞。
2 自動倒垃圾系統的設計及實驗測試
2.1 基站密封結構設計
在自動倒垃圾系統中,掃地機需要將塵盒內的垃圾倒入集塵基站,因此應提高出風口附近風速,確保風道密封良好,以防止垃圾被空氣逆流或泄漏出來。密封設計的關鍵在于掃地機與基站的對接部分。為了實現密封,我們在掃地機的出塵口和集塵基站的對接口6 上安裝密封套3。密封套3 設計成薄壁梯形,由硅膠材料制成,以提供足夠的彈力,能夠在掃地機對接稍有偏移時也能形成有效的密封,防止空氣和垃圾外泄。此外,我們還在基站上設計了掃地機前輪導向槽4 和后輪導向槽1,以確保掃地機在駛上基站平臺5 后,通過對輪子的導向限位,對接時能夠準確對準基站對接口6。為防止掃地機駛上基站平臺5 時,前輪壓壞密封套3,在密封套中部設計了防壓塊2,具體設計如圖4 所示。
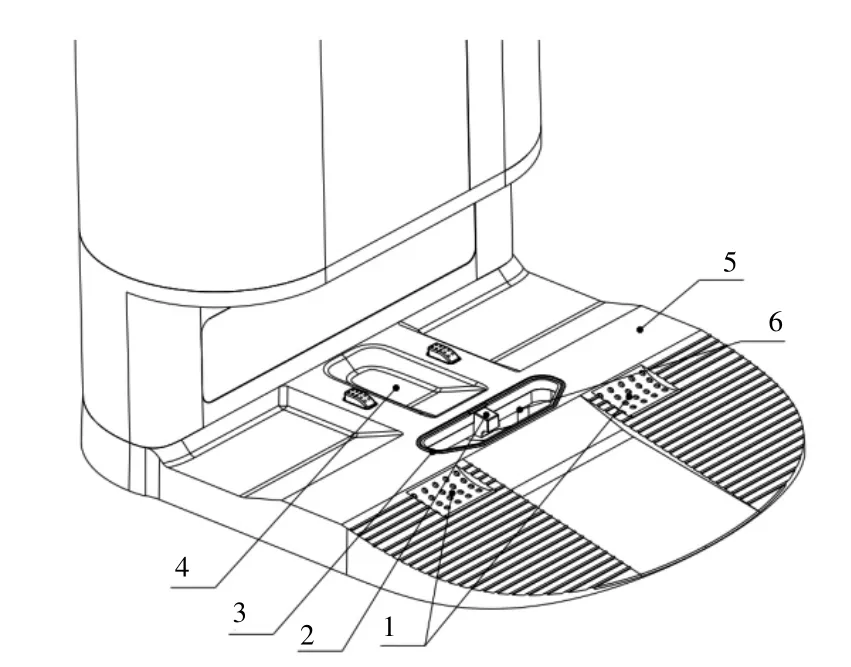
圖4 基站密封套和輪子導向槽的設計
2.2 掃地機旋風吹塵塵盒設計
2.2.1 塵盒小側門的設計
塵盒小側門的形狀、小大、位置都影響著塵盒內旋風的風速,決定了垃圾是否能倒干凈。根據流體力學原理,小側門的截面積大小直接影響著風速。因此,測試過程中需要仔細考慮小側門的形狀和截面積,并通過三維CAD 設計[5]進行結構設計和手板驗證。實驗表明,小側門開啟后的形狀應該是一種能夠加速氣流的近似喇叭形,外側大,內側小。這種形狀有助于減小流體的阻力,從而提高風速,倒垃圾最干凈。小側門的位置應該設計在塵盒的側面偏底部,以確保氣流能夠順利進入后,沿著塵盒底部內壁旋轉。一方面能減小能量損失,另一方面也能讓氣流沖擊到塵盒底部的所有死角,將死角頑固垃圾都卷起。改良后的掃地機如圖5 所示。

圖5 集塵基站改良密封后的掃地機
2.2.2 塵盒內壁的設計
塵盒內壁的設計對于小旋風的形成有著一定的重要性,要提高小旋風的風速,加強小旋風卷起垃圾的效率。首先,塵盒內壁應該設計成光滑的近似圓柱形,使得側門進入的高速氣流能在內壁的導向下形成旋風。同時避免旋風路徑上出現尖角、死角,以減小氣流嘯叫聲,防止垃圾纏繞堆積。
3 實驗
3.1 出塵口風速與倒垃圾效果實驗
為了研究出塵口風速與倒垃圾效果的關系,使用一款配有旋風吹塵塵盒的掃地機,分別匹配兩種不同的集塵基站依次測試。設定1#基站是原型,2#基站在1#基站的基礎上,提高了掃地機出塵口的風速。
首先,將掃地機塵盒內放入20 g 垃圾,讓掃地機與1#基站對接,測試了1#基站的吸收垃圾的效果,并記錄,使用下述關系可反映集塵基站回收率來衡量倒垃圾的效果。
然后,使用風速儀對掃地機出塵口附近的風速進行了測試,記錄風速值。
最后,換成2#基站來對接掃地機,重復以上測試,最終結果見表1。
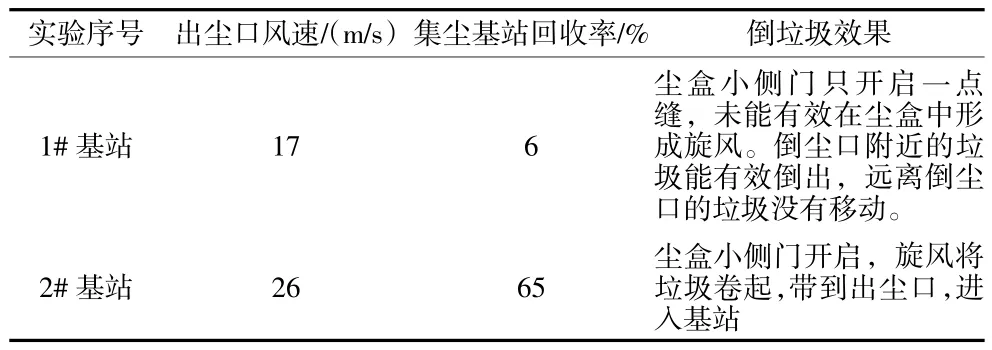
表1 不同出塵口風速的倒垃圾效果對比
通過測試發現,2#基站風速更大,集塵基站回收率高,倒垃圾效果更好。當風速增加時,較高的風速能夠更有效地推動垃圾。風速繼續增加至側門開啟后,能形成旋風,將塵盒死角的垃圾全部卷起,送到倒塵口,進入基站。
3.2 基站密封結構倒垃圾效果實驗
為了進一步增加出塵口風速,減少在倒垃圾過程中空氣泄漏,我們要對基站對接口進行了密封,增加了密封套,設計了相關實驗研究。本次測試重點加強了掃地機出塵口與集塵基站的對接口的密封設計。1#基站對接口為原型機,不使用密封套,2#基站對接口使用硅膠密封套。2 種基站均使用同款風機排風,其它的結構均一致。測試時,使用同一個掃地機,依次對接2 款基站進行測試,測試結果見表2。

表2 增加硅膠套密封前后的倒垃圾效果對比
實驗結果表明,使用同款風機,采用硅膠密封套的2#基站的密封性能更好,風量明顯更大,2#基站出塵口風速為32 m/s,也高于1#基站16 m/s。依據之前的實驗結果,出塵口風速越高,倒垃圾效果越好。所以,硅膠密封套的2#基站倒垃圾效果好于1#基站。
3.3 旋風吹塵塵盒倒垃圾效果實驗
為了進一步驗證旋風吹塵塵盒對倒垃圾效果的提升,分別使用普通塵盒和旋風吹塵塵盒進行自動倒垃圾實驗。本次測試使用掃地機分別安裝普通塵盒和旋風吹塵塵盒,塵盒內放入20 g 的毛發、貓糧、黃豆,讓掃地機對接集塵基站,使用基站最大檔位,自動倒垃圾30 s 后,查看塵盒內垃圾是否倒干凈,記錄集塵基站回收率,結果見表3。
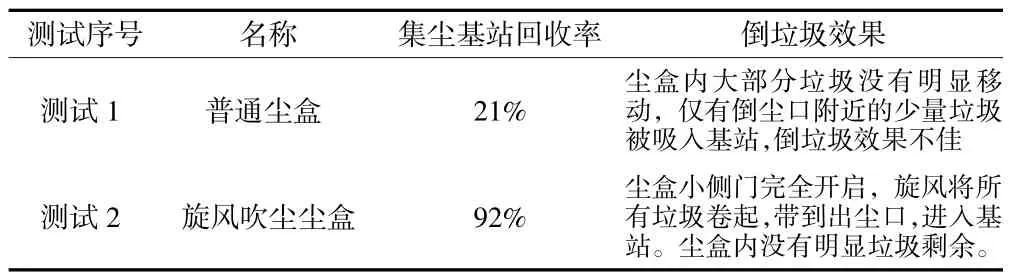
表3 換用旋風吹塵塵盒后的倒垃圾效果對比
如圖6 所示,測試2 使用旋風吹塵塵盒回收率為92%,遠高于普通塵盒。說明旋風吹塵技術能加速塵盒內風速,形成小旋風,能將塵盒內的垃圾倒干凈。
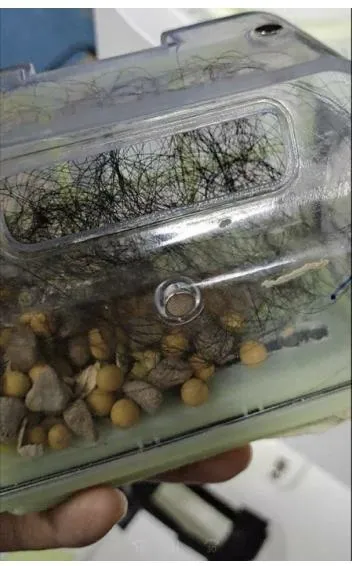
圖6 旋風吹塵塵盒放入毛發、貓糧、黃豆
4 結語
經過各項測試研究了流體力學原理在自動倒垃圾系統中的應用,用實驗證明了風速越大氣壓越小,能加速垃圾移動。通過加強基站密封,增加出塵口風速,能夠更好地推動垃圾進入出塵口和基站。同時,還應用了旋風吹塵技術,通過產生旋風將塵盒四周死角的垃圾卷起,進一步提高了頑固垃圾清理的效率,為自動倒垃圾系統的性能提供了創新的解決方案。
猜你喜歡
氣象與環境科學(2021年4期)2021-08-27 02:26:12
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中國電業與能源(2020年5期)2020-06-16 02:20:00
陜西氣象(2020年2期)2020-06-08 00:54:38
西南交通大學學報(2016年4期)2016-06-15 20:29:37
風能(2016年11期)2016-03-04 05:24:00
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15
電網與清潔能源(2015年3期)2015-02-28 16:03:31
