基于dq坐標系下6次諧波抑制的車用感應電機低頻共振削弱方法
2023-12-25 09:19:44張文娟苗軼如黃守道楊生博
電工技術學報 2023年24期
馮 婉 張文娟 苗軼如, 黃守道 楊生博
基于dq坐標系下6次諧波抑制的車用感應電機低頻共振削弱方法
馮 婉1,2張文娟2苗軼如2,3黃守道2楊生博3
(1. 長沙學院電子信息與電氣工程學院 長沙 410022 2. 湖南大學電氣與信息工程學院 長沙 410082 3. 輸配電裝備及系統安全與新技術國家重點實驗室(重慶大學) 重慶 400044)
死區、管壓降等非線性因素會在逆變器的輸出電壓中注入低次諧波,從而引起定子電流發生5次與7次諧波畸變并增加轉矩脈動。同時,由于電動汽車用感應電機的固有頻率較低,當電機中高速運行時,定子電流的低次諧波頻率與電機固有頻率重合,從而產生低頻共振。針對上述問題,該文首先對感應電機固有頻率的仿真與測試方法展開研究,確定電機的固有頻率范圍。然后在對死區與管壓降所引起諧波畸變特性進行分析的基礎上,提出在轉子磁鏈定向后的兩相旋轉坐標系(dq坐標系)下矢量控制系統中電流內環加入可衰減6次諧波的諧振控制器,并針對諧振控制器參數的設計方法展開研究。最后建立仿真模型與實驗平臺,結合電流快速傅里葉變換(FFT)分析結果與功率譜密度以及振動實驗數據,并與其他前饋補償方法進行對比,證明通過對dq坐標系下6次諧波的抑制,可有效降低定子電流的5次與7次諧波以及固有頻率處電機的振動功率,同時說明該文的理論分析與所提的dq坐標系下6次諧波抑制方法是正確且可行的。
感應電機 低頻共振 低次諧波 控制策略 死區
0 引言
發展電動汽車是解決能源與環境問題,實現“碳達峰、碳中和”目標的有效手段[1]。然而,電動汽車的電機驅動系統存在嚴重的振動與噪聲問題[2-3]。首先,在調制過程中,逆變器輸出電壓在開關頻率及其整數倍頻處的較窄頻段中存在豐富的高次諧波,不僅產生強烈的電磁干擾,還會給電機帶來嚴重的電磁振動與噪聲,降低電機壽命,容易讓用戶感覺不適[4-5]。針對以上問題,國內外學者提出用變載波頻率調制代替傳統固定載波頻率調制。包括隨機載波頻率[6-7]與周期載波頻率等調制策略[8],在總諧波能量不變的前提下,以上方法能夠將開關頻率及其倍頻附近分布的特征諧波頻譜分散至更寬的頻段內,對因調制引起的電機高頻噪聲具有良好抑制效果。
當定子電流存在與電機固有頻率重合的諧波時,就會引發電機共振[4-5]。在理想情況下,逆變器線電壓與定子電流僅存在基波與開關頻率及其倍數頻率附近分布的邊帶諧波,并不包含其他低次諧波[9]。但是,逆變器中開關管的導通壓降、緩沖電容以及在調制過程為防止橋臂直通而加入的死區時間等非線性因素會導致電機定子電流發生低次諧波畸變[10],加之電動汽車用感應電機的固有頻率低,且電機運行速域寬,調制過程所產生的低次諧波難免會與電機的固有頻率重合,從而發生低頻共振[5]。文獻[11]通過選擇合理的槽配合,以削弱與電磁振動相關的電磁力波,降低感應電機(Induction Motor, IM)在固有頻率處的振動峰值。除了電機本體優化設計,減小因死區與管壓降引起的電流低次諧波畸變是削弱電機低頻共振的必要手段。基于脈沖時間補償是最為傳統且常用的低次諧波抑制方法,即根據定子電流極性將死區與管壓降引起的電壓誤差轉換為一個開關周期內的脈沖寬度調制(Pulse Width Modulation, PWM)并進行補償,但是該方法的補償效果有限[12],尤其是零電流鉗位現象依然明顯。文獻[13]提出一種無死區調制方法,上下橋臂的開關信號不再保持互補,而是根據電流極性,僅有一路發生動作,另一路保持關斷狀態,依靠體二極管完成續流,從而避免了因死區加入而產生電流諧波,但是該方案存在電流過零時極性判斷不準確的問題,零電流鉗位效應較為明顯。為此文獻[9]提出一種反向補償法,促使電流提前過零,但是電流低次諧波畸變情況依然較為嚴重。文獻[14]提出在電壓給定信號進行平均電壓誤差前饋補償,能夠降低次諧波畸變,但是抑制效果有限,且依賴于電流極性的采樣精度。由于死區、管壓降等非線性因素所產生的電流諧波主要為5次與7次,文獻[15]提出一種基于PI控制器的5、7次諧波抑制策略,該方案需要通過坐標變換分別將定子電流的5、7次諧波映射為直流量,再利用4個PI控制器得到5、7次諧波dq坐標系下電流補償量,但是該方法實現過程較為復雜。文獻[16]在進行控制系統建模時將非線性誤差,通過合理配置PI控制器參數實現對低次諧波引起擾動作用的抑制,但是該方案會降低控制系統的動態響應速度。文獻[17]提出一種考慮死區的特定低次諧波消除策略,并給出了死區時間設計的經驗公式,但是該方案未考慮管壓降引起的諧波畸變。文獻[5]提出一種基于帶通濾波器的固有頻率范圍內的電流頻譜整形控制策略,但是未考慮濾波器參數的優化設計。文獻[18]將逆變器的非線性電壓誤差視為擾動量,并分解為考慮緩沖電容下由死區時間引起的電壓誤差以及由導通壓降引起的電壓誤差。針對兩種電壓誤差分別提出了相應的前饋補償量計算方法。
本文針對減小電機低頻共振的定子電流低次諧波抑制方法展開研究,首先對電機低頻固有頻率進行仿真與實驗測試;然后對低次諧波特性進行分析,在此基礎上對矢量控制進行改進,提出在dq坐標系下的電流內環中引入6次諧振控制器,并給出控制器參數設計的理論依據;最后分別通過仿真與實驗對所提方法及其理論分析的可行性與正確性進行驗證。
1 電機固有頻率的仿真與測試
首先對本文所研究電動汽車用感應電機進行模態分析,其參數見表1。然后在SoildWorks等比例繪制電機三維模型,導入至有限元軟件Ansys/ Workbench進行模態分析,并在不施加任何約束的前提下,對各階振型和固有頻率進行求解。在4 kHz以內得到容易產生共振的兩個二階模態和兩個三階模態,如圖1所示。
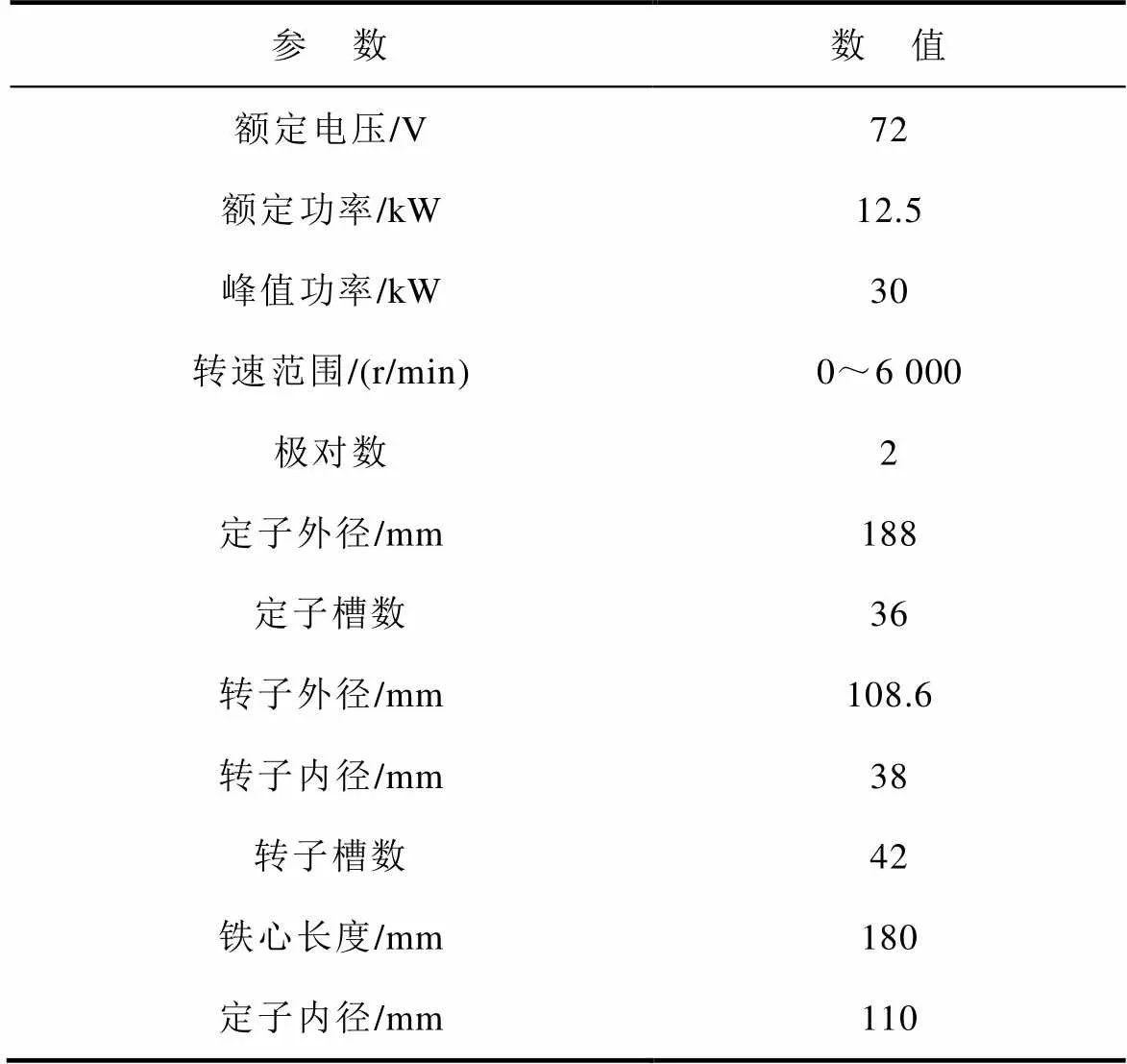
表1 電動汽車用感應電機參數

圖1 電機模態分析振形
采用單點激振力錘錘擊法進行電機的模態實驗,測量電機的固有頻率。采用帶有傳感器的鋼質力錘產生寬頻帶激勵,用加速傳感器吸附在電機上測量激勵響應信號,用信號分析儀采樣與存儲激勵信號和響應信號,并將數據傳送至上位機數據處理軟件,得到電機的模態數據,電機模態實驗示意圖如圖2所示。
進行多次測試,得到垂直方向的電機頻率響應曲線,如圖3所示。頻率響應曲線中的峰值點所對應的頻率為電機的固有頻率,與有限元仿真結果相同,共包含兩個二階固有頻率和兩個三階固有頻率。

圖2 電機模態實驗示意圖
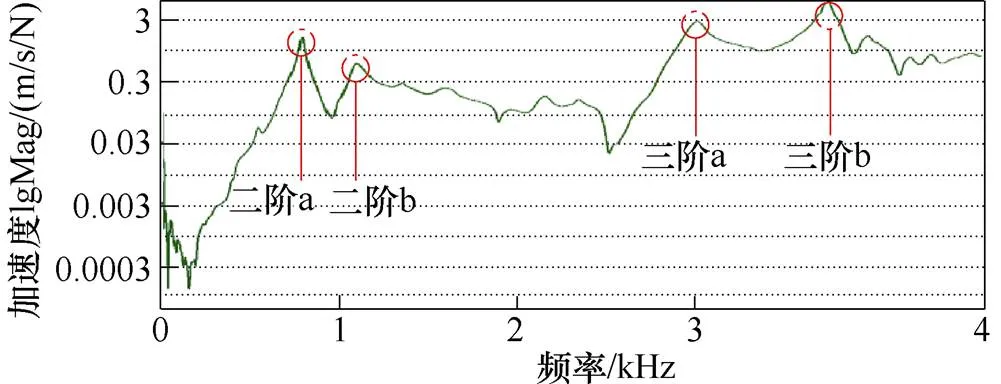
圖3 電機模態實驗下的頻率響應曲線
固有頻率的仿真與實驗結果見表2,兩者誤差較小,證明固有頻率的仿真與實驗測試方法的正確性。

表2 固有頻率的仿真與實驗結果
2 定子電流低次諧波特性分析
三相電壓源型感應電機驅動系統拓撲結構如圖4所示。
在理想情況下,采用空間矢量脈寬調制(Space Vector PWM, SVPWM)策略的線電壓僅含有基波與開關頻率與倍數頻率附近的高次諧波,其諧波分布如圖5a所示,此時定子電流的低次諧波分布如圖5b所示,低次諧波含量很低。而當加入死區后,定子電流的低次諧波分布如圖5c所示,與圖5a相比,5次與7次諧波顯著增加,考慮開關管與體二極管導通壓降情況下的電流諧波分布如圖5d所示,5次與7次諧波又進一步增加。低次諧波不僅會增加轉矩脈動,惡化電機的動力性能,尤其在轉速大于4 000 r/min的情況下,低次諧波將會與電機的二階固有頻率發生重合,從而引發低頻共振。

圖4 電壓源型電機驅動系統拓撲結構
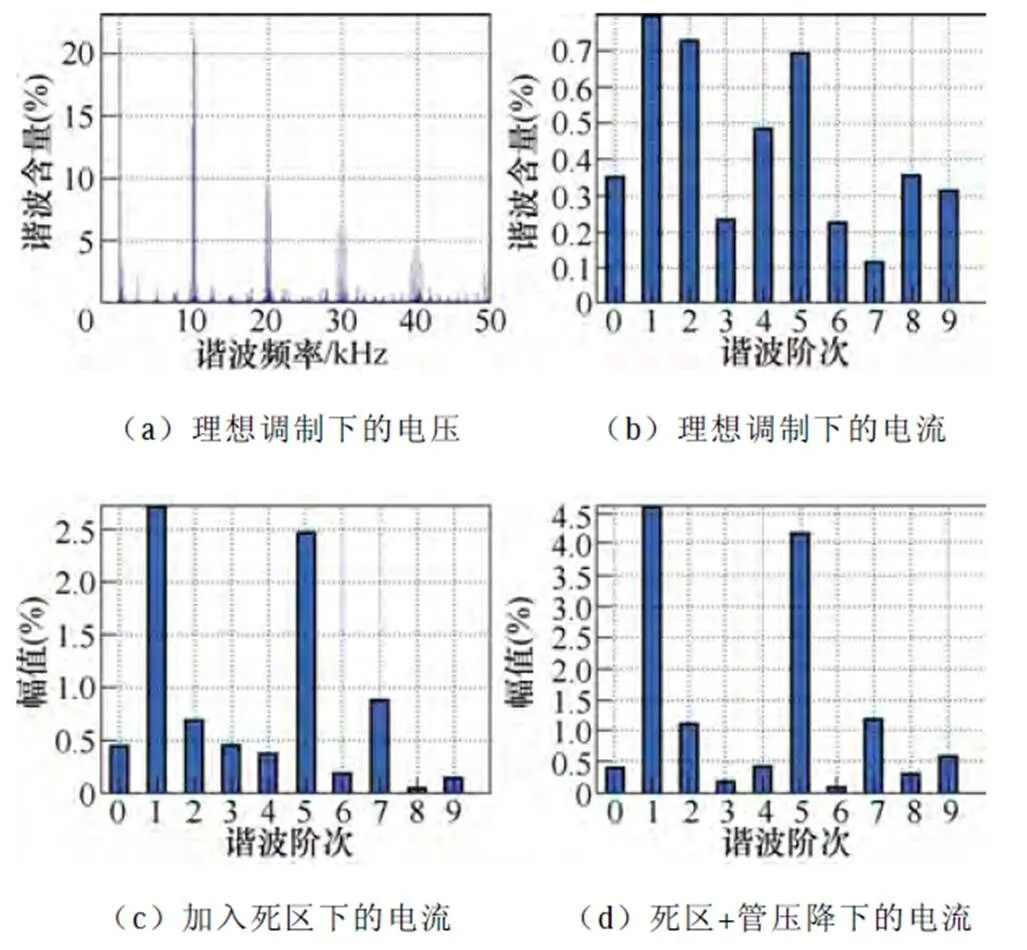
圖5 不同情況下的諧波分布
定義三相定子電流5次諧波分量表達式為

三相7次諧波分量的時序為正序,定義其表達式為


圖6為考慮死區與管壓降情況下dq坐標系下定子電流d、q的低次諧波分布示意圖。可以看出dq坐標系下5次與7次電流諧波的頻率均為6次,與式(2)和式(4)的結果是一致的。因此,降低dq坐標系下電流的6次諧波與減小三相定子電流的5、7次諧波是等效的。
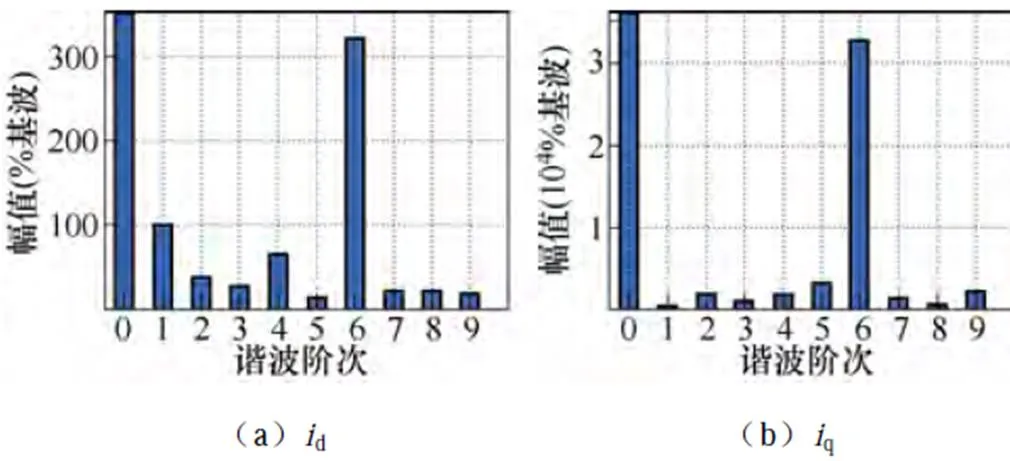
圖6 dq坐標系下定子電流的低次諧波分布
3 6次諧波諧振控制器的參數優化設計
為減小d、q中的6次諧波含量,本文提出在電流環的控制器中加入6次諧波諧振控制器,其表達式為

圖7 引入6次諧波諧振控制器的電流內環結構


在不加入6次諧波控制器的情況下,電流內環的開環傳遞函數i_ol()為
電流的閉環傳遞函數i_cl()表達式為

其幅頻特性曲線如圖8a所示。將死區與管壓降在dq坐標系產生的6次諧波畸變視為擾動量d6,d6到d的傳遞函數u_i()的表達式為

u_i()的幅頻特性曲線如圖8b所示,可以明顯看出,在70 Hz~1.8 kHz范圍內的u_i()增益在0 dB以上,說明常規PI控制器不具備抑制該頻段內電壓非線性引起定子電流低次諧波畸變的能力。

圖8 電流內環與電壓擾動傳遞函數的幅頻特性曲線
當基頻為170 Hz時,5次與7次諧波頻率分別為850 Hz和1 190 Hz,與電機的二階固有頻率重合,諧波過大時將會發生共振。令6次諧波控制器中自然頻率=2 240prad/s,=0.5,繪制不同r取值下開環傳遞函數i_ol()的幅頻特性曲線,如圖9所示。可以看出,6次諧波控制器的加入,對i_ol()的低頻特性不產生影響,但是隨著r的增加,在1 000 Hz處的增益明顯增加,截止頻率也同樣增加,但是相位裕度隨之減小,可能導致系統不穩定。為了進一步分析r對系統穩定性的影響,繪制r從1增加至4情況下閉環傳遞函數i_cl()的極點分布,如圖10所示。隨著r增加,系統的一對共軛極點向右移動,當r>3.5時,i_cl()出現右半平面極點,導致系統處于不穩定狀態。為了從理論上證明6次諧波控制器對6次諧波的抑制效果,繪制r從1增加至3情況下電壓擾動傳遞函數u_i()的幅頻特性曲線,如圖11所示。由于控制器的加入,6次諧波處及其周邊頻段的幅值增益下降至0 dB以下,隨著r的增加,抑制效果越明顯。盡管出現了另一個尖峰,但是dq坐標系下逆變器輸出電壓在該尖峰所處頻率范圍并不存在諧波,因此不會引起額外的諧波畸變。但是應盡量滿足u_i()的截止頻率小于12次諧波頻率,以防止增加定子電流的11次與13次諧波。

圖9 不同kr取值下電流開環傳遞函數的幅頻特性曲線
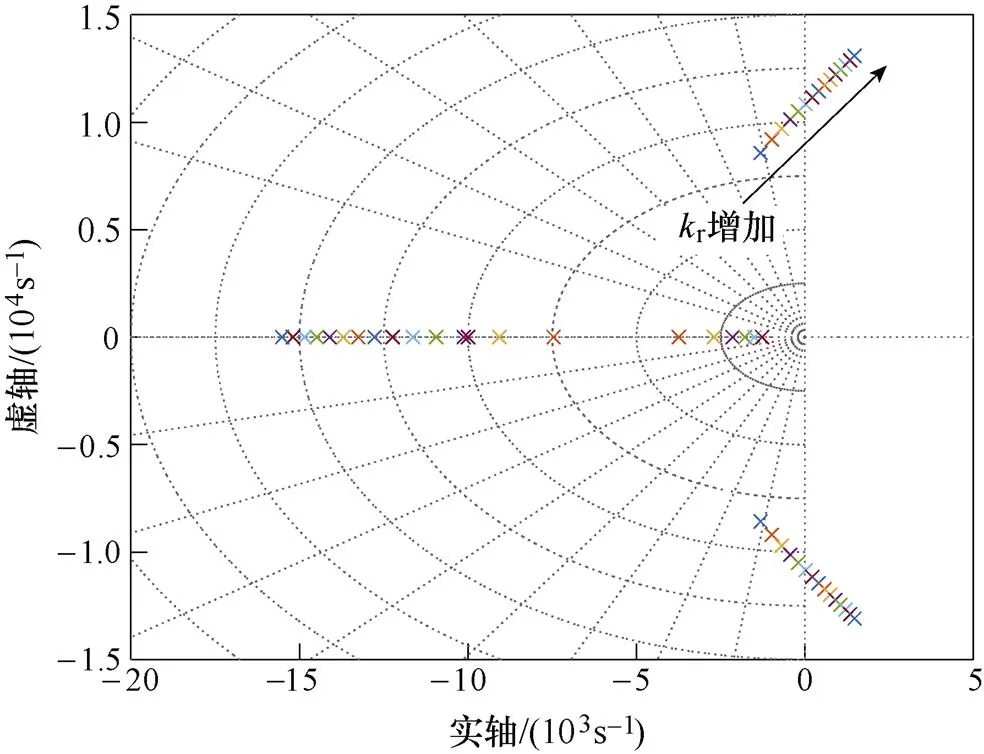
圖10 不同kr取值下電流閉環傳遞函數的極點分布

圖11 不同kr取值下Gu_i(s)的幅頻特性曲線
4 仿真結果與分析
首先結合仿真與理論分析對本文所提方法的優越性進行驗證與說明。在Matlab的Simulink平臺分別構建了傳統基于脈沖時間補償模型、文獻[18]提出的逆變器非線性前饋補償模型以及本文所提6次諧波控制器模型,對電機固有頻率處的低次諧波抑制效果進行仿真與比較。仿真模型中感應電機與逆變器參數見表3,開關頻率與采樣頻率均為10 kHz,r設置為2.5。在電機轉速給定為5 000 r/min,負載4 N·m的工況下進行仿真,設置死區時間為2ms,傳統基于脈沖時間補償模型、逆變器非線性前饋補償模型以及本文所提6次諧波控制器模型的仿真結果分別如圖12~圖14所示。

表3 電機與逆變器參數
(a)定子電流波形

(b)諧波分析結果

(c)轉矩波形
圖12 基于脈沖時間補償下的仿真波形
Fig.12 Simulation waveforms under compensation of the duration of pulse

(a)定子電流波形
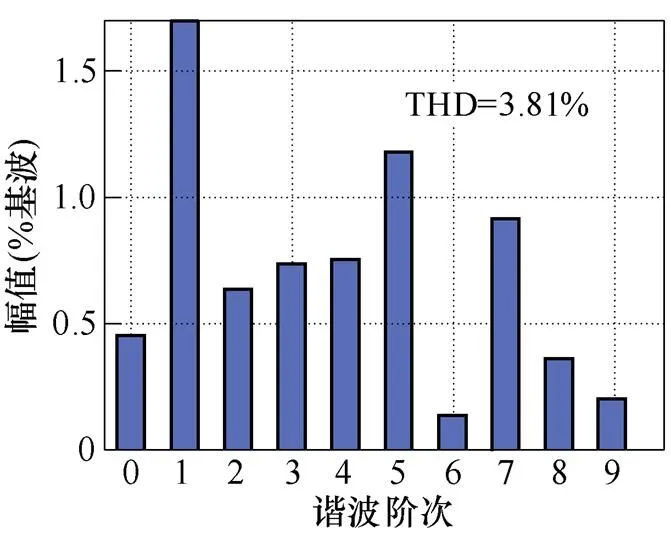
(b)諧波分析結果

(c)轉矩波形
圖13 逆變器非線性前饋補償下的仿真波形
Fig.13 Simulation waveforms under inverter nonlinearity feedforward compensation

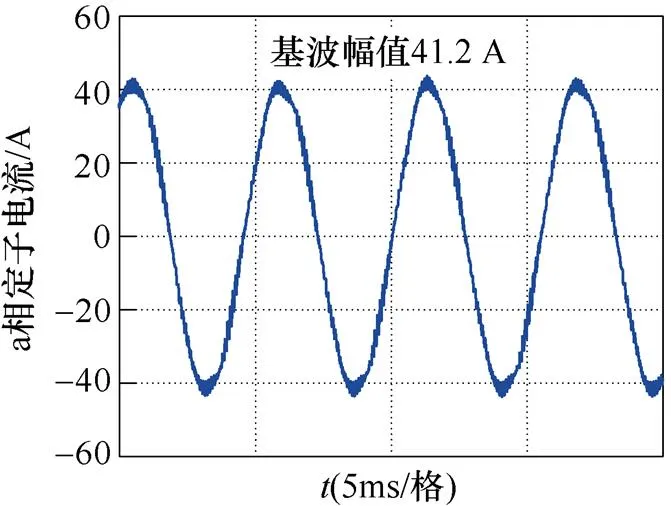
(a)定子電流波形
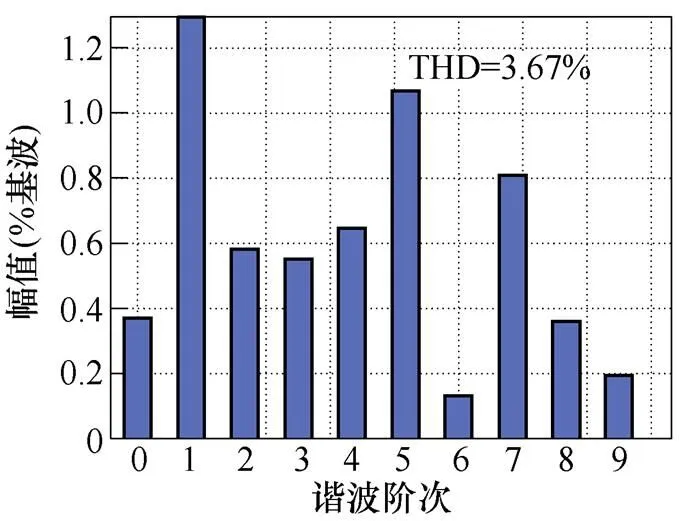
(b)諧波分析結果

(c)轉矩波形
圖14 采用6次諧波控制器的仿真波形
Fig.14 Simulation waveforms under control of 6th harmonic
文獻[18]提出的逆變器非線性前饋補償策略則考慮了死區階段緩沖電容的影響,并將死區與管壓降引起的電壓誤差在給定值上進行補償,與脈沖時間補償相比,低次諧波抑制效果有所提高。其中,定子電流5次諧波占比為1.2%,7次諧波占比為0.9%。轉矩脈動范圍±0.3 N·m。而在dq坐標系的電流內環加入本文所提出的6次諧波控制器之后,THD下降至3.67%,其中5次諧波與7次諧波均顯著減小,分別為1.07%和0.8%,轉矩脈動范圍也減小至3.8~4.2 N·m之間,仿真結果證明了本文所提出的6次諧波控制器及其參數設計方法是有效可行的。
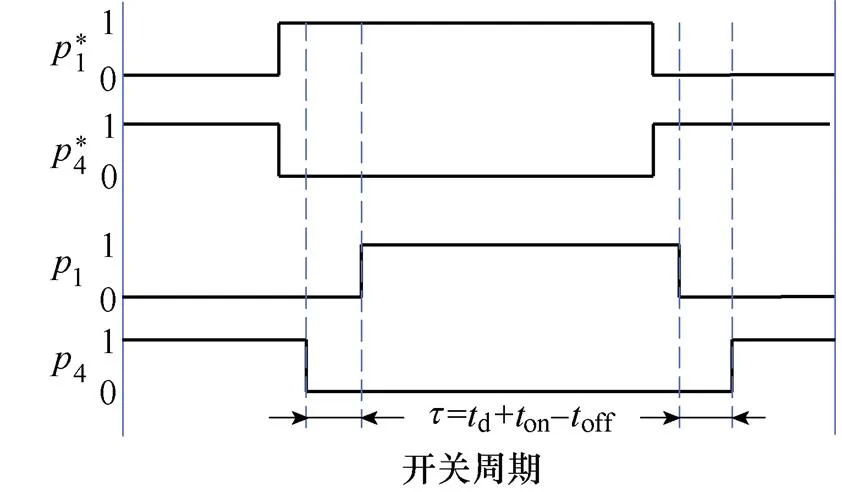
(a)開關信號
(b)a>0情況下的輸出電壓

(c)a<0情況下的輸出電壓
圖15 傳統脈沖時間補償方法的示意圖
Fig.15 The diagram for the compensation method of the duration of pulse
5 實驗結果與分析
為了對本文所提方法的有效性進行進一步驗證,搭建了如圖16所示的電機對拖實驗平臺。采用TMS320F28069進行數據處理,采用非接觸式傳感器MLX91205采樣電機定子電流,開關頻率與采樣頻率均為10 kHz,電機參數與仿真一致。在四種不同工況下,對本文所提方法進行實驗驗證,并與傳統基于脈沖時間補償以及文獻[18]提出的逆變器非線性前饋補償進行比較。

圖16 電機對拖實驗平臺
(1)工況1(低速500 r/min,額定負載4 N·m):傳統脈沖時間補償方法、逆變器非線性前饋補償方法與本文所提6次諧波控制的實驗結果分別如圖17~圖19所示。此時定子電流基波頻率為26.3 Hz,6次諧波控制器中諧振頻率n設置為991.5 rad/s,由于電流過零點附近所持續的開關周期較多,零電流鉗位效應較為嚴重。脈沖時間補償下定子電流THD為4.82%,轉矩脈動為±0.4 N·m,5次諧波占比為1.74%,7次諧波占比為1.79%。

圖17 500 r/min,4 N·m工況下基于脈沖時間補償策略的實驗波形
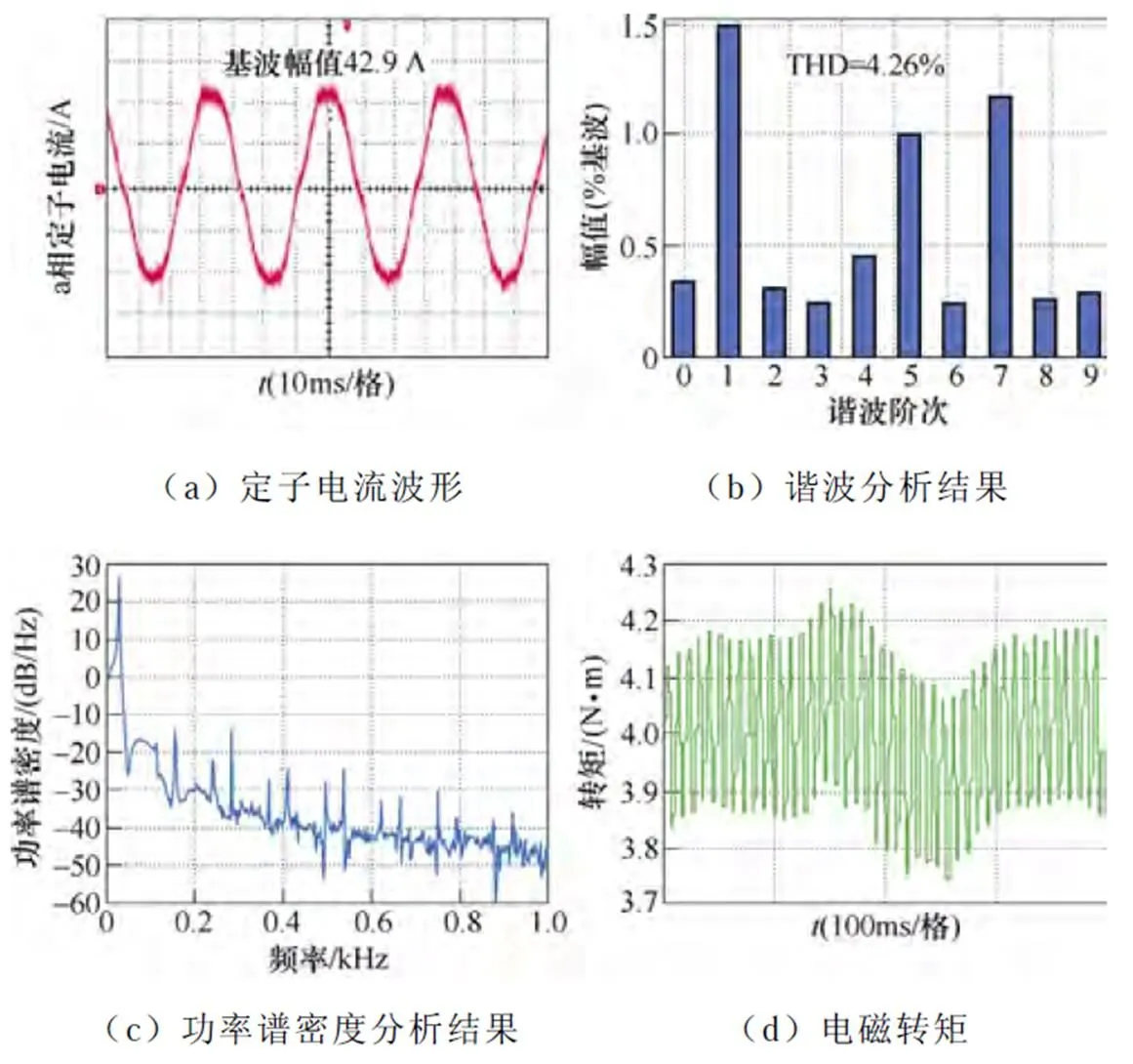
圖18 500 r/min,4 N·m工況下逆變器非線性前饋補償策略的實驗波形

圖19 500 r/min,4 N·m工況下采用6次諧波控制器的實驗波形
文獻[18]提出的逆變器非線性電壓前饋補償策略將電壓誤差分解為由導通壓降引起的電壓誤差Dan_cond與死區階段形成的電壓誤差Dan_dt,其計算模型為

式樣,vt為導通壓降,隨溫度變化不大,vt可根據數據手冊設置為常數;dt為因死區時間引起的電壓誤差;dt與緩沖電容參數有關。dt、dt均需要通過多次實驗測試得到。最后將Dan_cond與Dan_dt疊加至指令電壓。由圖18可以看出,采用逆變器非線性電壓前饋補償方法后,定子電流的THD為4.26%,轉矩脈動為±0.25 N·m,5次諧波占比為1.01%,7次諧波占比為1.19%。而采用本文所提6次諧波控制策略后,定子電流的THD降低至3.75%,轉矩脈動為±0.2 N·m,5次諧波占比為0.92%,7次諧波占比為1.03%。盡管文獻[18]提出的逆變器非線性電壓前饋補償策略與傳統脈沖時間補償方法相比,能夠提高電壓補償量的精度,但是兩者本質均屬于離線前饋補償策略,對低次諧波的抑制效果有限。而本文所提出的6次諧波控制器本質屬于一種反饋控制方法,當dq軸系下定子電壓的6次諧波在定子電流中產生6次諧波分量時,諧波控制器會自適應輸出相應幅值與頻率的給定電壓,能夠抵消dq軸系下定子電壓的6次諧波分量。另外,當開通延時、關斷延時、管壓降等非線性因素發生變化時,與離線前饋補償方法相比,6次諧波控制器可以自適應調整六倍頻給定電壓的幅值與相位,具有良好的抗擾動性。
(2)工況2(額定轉速3 000 r/min,額定負載4 N·m):傳統脈沖時間補償方法、逆變器非線性前饋補償方法與本文所提6次諧波控制的實驗結果分別如圖20~圖22所示。定子電流基波頻率為111.6 Hz,6次諧波控制器中自然頻率n設置為4 222 rad/s,脈沖時間補償下,定子電流THD為4.20%,轉矩脈動為±0.3 N·m,5次諧波占比為1.58%,7次諧波占比為1.03%。逆變器非線性電壓前饋補償方法后,定子電流的THD為3.95%,轉矩脈動為±0.2 N·m,5次諧波占比為1.13%,7次諧波占比為0.91%。而采用本文所提6次諧波控制策略后,定子電流的THD降低至3.66%,轉矩脈動為±0.15 N·m,5次諧波占比為0.89%,7次諧波占比為0.54%。

圖20 3 000 r/min,4 N·m工況下基于脈沖時間補償策略的實驗波形
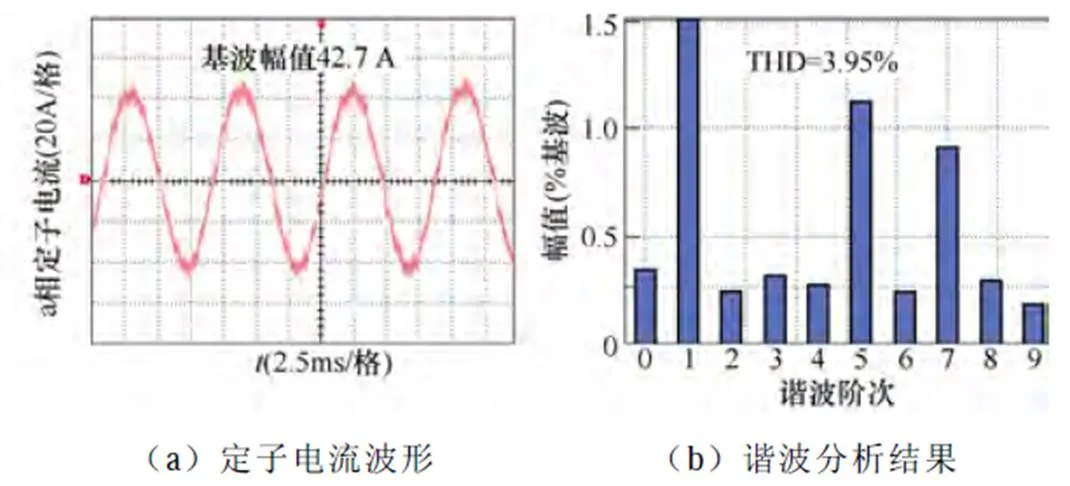

圖21 3 000 r/min,4 N·m工況下逆變器非線性前饋補償策略的實驗波形

圖22 3 000 r/min,4 N·m工況下采用6次諧波控制器的實驗波形
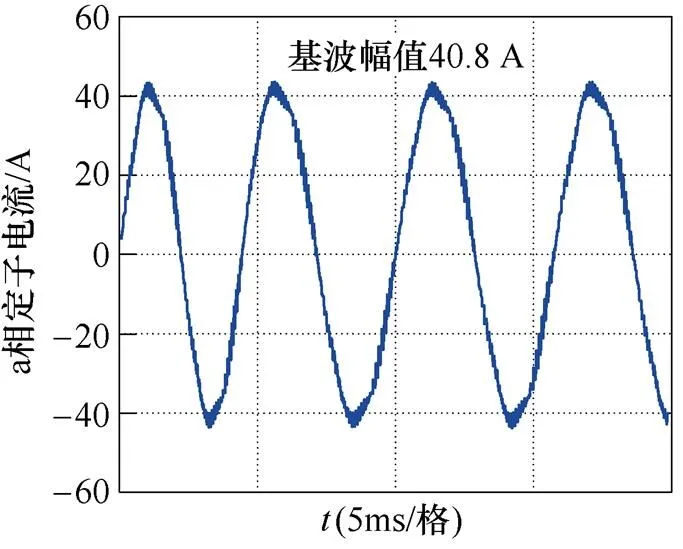
(3)工況3(高速5 000 r/min,額定負載4 N·m):傳統脈沖時間補償方法、逆變器非線性前饋補償方法與本文所提6次諧波控制的實驗結果依次如圖23~圖25所示。定子電流基波頻率為171.3 Hz,6次諧波控制器中自然頻率n設置為2 240prad/s。脈沖時間補償下,定子電流THD為4.77%,轉矩脈動為±0.4 N·m,5次諧波占比為1.65%,7次諧波占比為1.5%。采用逆變器非線性電壓前饋補償方法后,定子電流的THD為4.21%,轉矩脈動為±0.35 N·m,5次諧波占比為1.3%,7次諧波占比為1.01%。而采用本文所提6次諧波控制策略后,定子電流的THD降低至3.84%,轉矩脈動為±0.26 N·m,5次諧波占比為1.04%,7次諧波占比為0.7%,實驗結果與仿真結果基本一致。
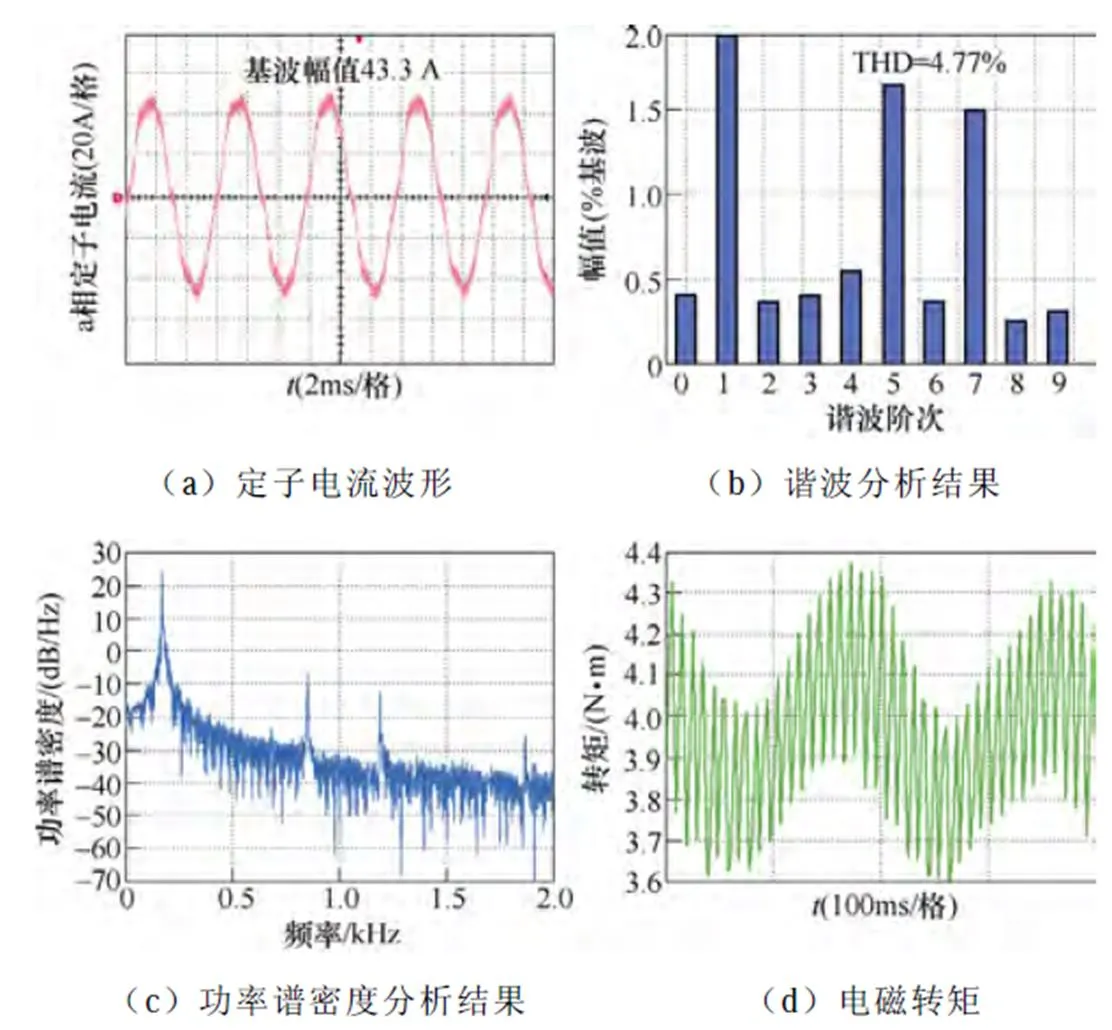
圖23 5 000 r/min,4 N·m工況下基于脈沖時間補償策略的實驗波形

圖24 5 000 r/min,4 N·m工況下逆變器非線性前饋補償策略的實驗波形
(4)工況4(額定轉速3 000 r/min,空載):傳統脈沖時間補償方法、逆變器非線性前饋補償方法與本文所提6次諧波控制的實驗結果分別如圖26~圖28所示。定子電流基波頻率為100 Hz,6次諧波控制器中自然頻率n設置為1 200prad/s。脈沖時間補償下,定子電流THD為6.01%,轉矩脈動為±0.4 N·m,5次諧波占比為2.04%,7次諧波占比為1.8%。逆變器非線性電壓前饋補償方法后,定子電流的THD為5.65%,轉矩脈動為±0.35 N·m,5次諧波占比為1.88%,7次諧波占比為1.48%。而采用本文所提6次諧波控制策略后,定子電流的THD降低至4.38%,轉矩脈動為±0.25 N·m,5次諧波占比為1.55%,7次諧波占比為1.1%。

圖25 5 000 r/min,4 N·m工況下采用6次諧波控制器的實驗波形

圖26 3 000 r/min,空載工況下基于脈沖時間補償策略的實驗波形

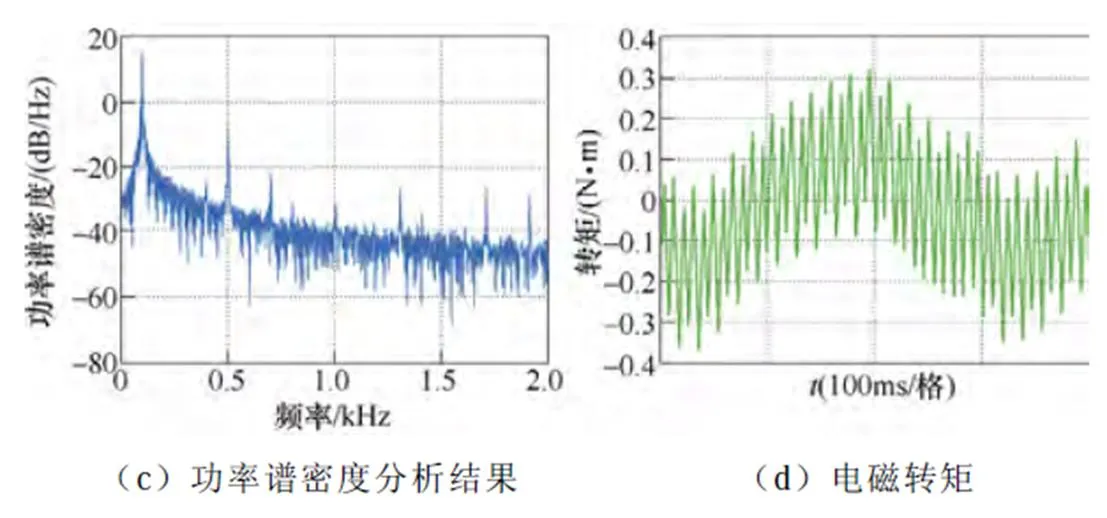
圖27 3 000 r/min,空載工況下逆變器非線性前饋補償策略的實驗波形
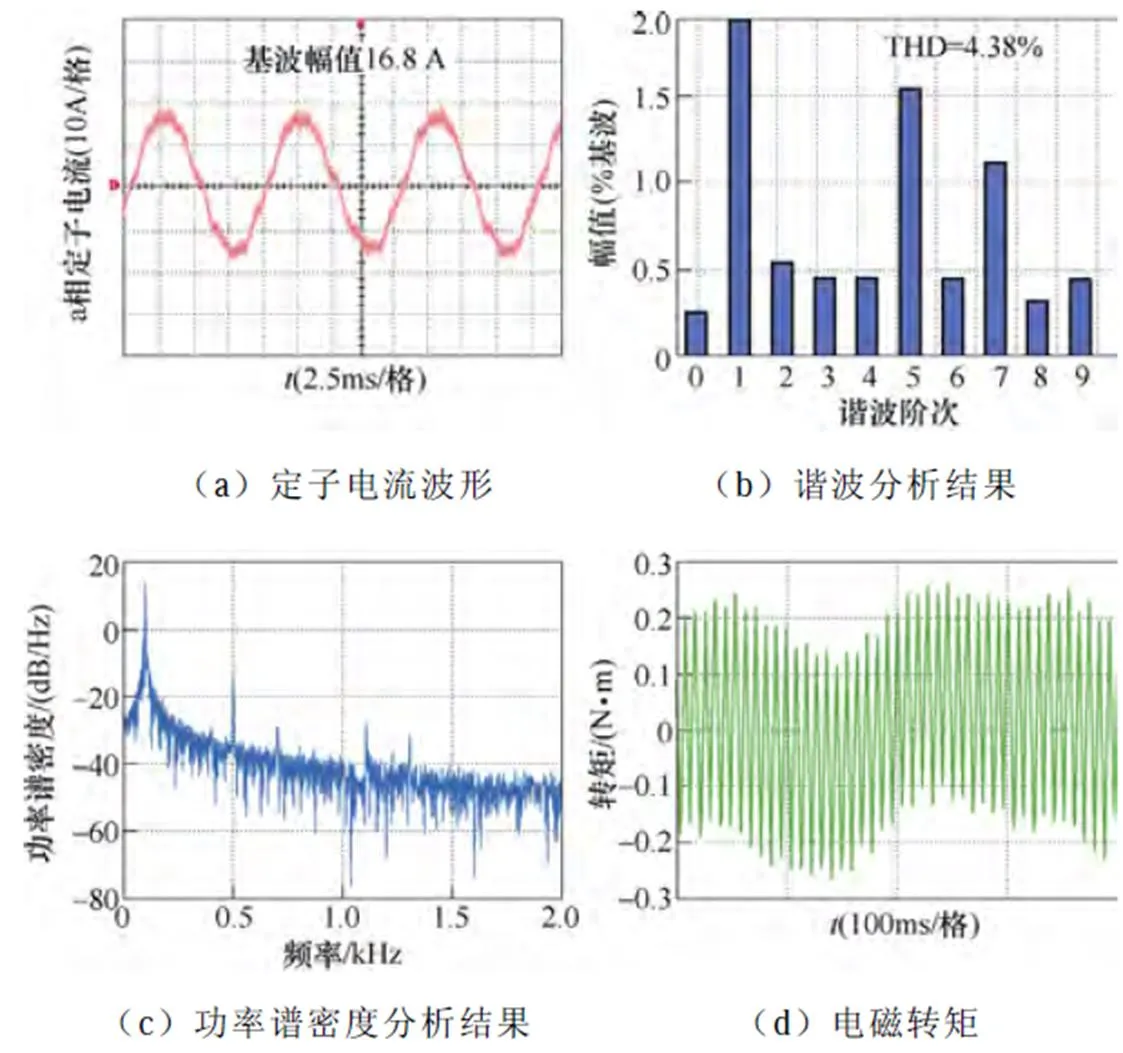
圖28 3 000 r/min,空載工況下采用6次諧波控制器的實驗波形
以上四組實驗結果均表明本文所提6次諧波反饋抑制方法是優于傳統基于脈沖時間補償方法與文獻[18]所提出的逆變器非線性前饋補償方法,也說明配置方法是正確可行的。
為了進一步驗證6次諧波控制器對固有頻率處共振的抑制效果,讓電機在5 000 r/min,4 N·m工況下穩態運行,用振動測量儀對電機的振動頻譜進行測試。圖29分別給出了未補償與6次諧波控制下1.8 kHz以內的電機振動的功率譜密度。從圖29a可以看出,在未補償情況下,電機在二階固有頻率附近存在兩個振動峰值,分布在850 Hz與1 160 Hz附近。而在dq坐標系下的電流內環控制器中加入6次諧波控制算法后,兩個二階固有頻率處的振動得到了明顯抑制,實驗結果進一步證明了dq坐標系下6次諧波控制器及其參數設計方法對定子電流5次、7次諧波畸變具有良好的抑制作用,在降低轉矩脈動的同時,還能夠削弱電機的共振,提高電機驅動系統的動力性能。

(a)無補償
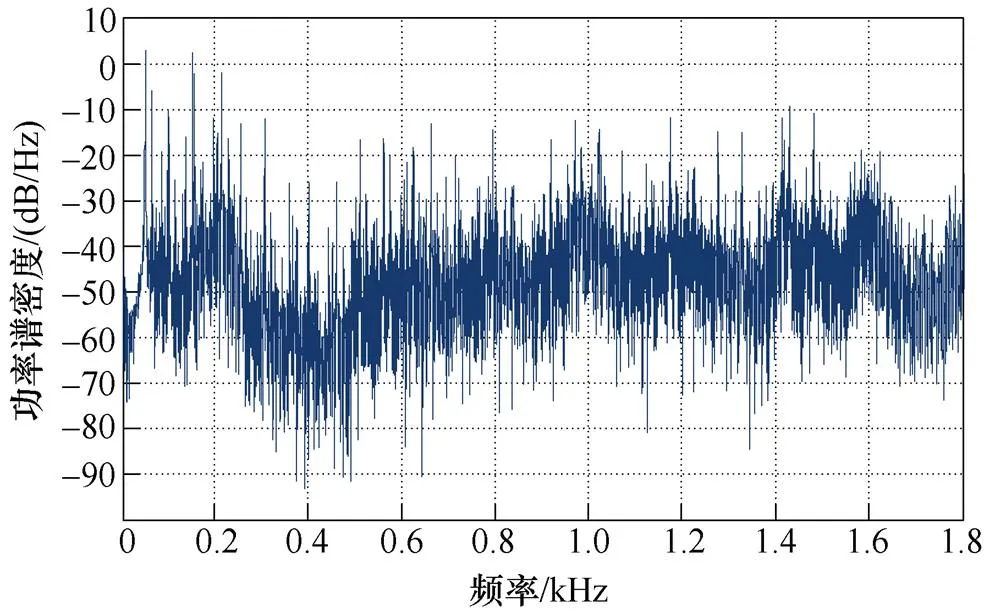
(b)dq坐標系下6次諧波控制
圖29 電機振動的功率譜密度測試結果
Fig.29 Power spectral density of the vibration in IM
6 結論
仿真與實驗結果證明了本文所提dq坐標系下6次諧波控制器及其參數設計方法對降低定子電流的5次與7次諧波畸變,削弱電機的低頻共振,提高電機驅動系統的動力性能,具有良好的效果,并形成以下結論:
1)死區時間和開關管與二極管壓降會在逆變器輸出電壓中產生非線性誤差,基于轉子磁鏈定向的電流內環PI控制器不能抑制由非線性電壓引起的定子電流5次與7次諧波畸變。
2)對定子電流中5次與7次諧波進行坐標變換,均轉換為dq坐標系的6次諧波,本文所提出的6次諧波控制器能夠有效抑制非線性電壓的擾動作用,且不產生其他頻率的諧波畸變,同時不影響電流內環的控制性能。
3)與離線前饋補償方法相比,本文所提6次諧波控制器屬于特定頻率諧波反饋控制方法,諧波控制器能自適應抵消dq軸系下定子電壓中的6次諧波分量,具有良好的抗擾動性。
[1] 王彥哲, 周勝, 王宇, 等. 中國核電和其他電力技術環境影響綜合評價[J]. 清華大學學報 (自然科學版), 2021, 61(4): 377-384.
Wang Yanzhe, Zhou Sheng, Wang Yu, et al. Comprehensive assessment of the environmental impact of China’s nuclear and other power generation technologies[J]. Journal of Tsinghua University (Science and Technology), 2021, 61(4): 377-384.
[2] 鄭江, 代穎, 石堅. 車用永磁同步電機的電磁噪聲特性[J]. 電工技術學報, 2016, 31(增刊1): 53-59.
Zheng Jiang, Dai Ying, Shi Jian. Electromagnetic noise characteristics of permanent magnet syn- chronous motor applied in electric vehicle[J]. Transa- ctions of China Electrotechnical Society, 2016, 31(S1): 53-59.
[3] 崔納新, 張承慧, 李珂, 等. 電動汽車異步電機變頻驅動系統的自抗擾控制[J]. 電工技術學報, 2007, 22(8): 150-154.
Cui Naxin, Zhang Chenghui, Li Ke, et al. Auto- disturbance-rejection control of induction motor drives for electric vehicles[J]. Transactions of China Electrotechnical Society, 2007, 22(8): 150-154.
[4] Yang Ming, Lü Zekai, Xu Donglin, et al. Resonance suppression and EMI reduction of GaN-based motor drive with sine wave filter[J]. IEEE Transactions on Industry Applications, 2020, 56(3): 2741-2751.
[5] 劉和平, 劉慶, 張威, 等. 電動汽車用感應電機削弱振動和噪聲的隨機PWM控制策略[J]. 電工技術學報, 2019, 34(7): 1488-1495.
Liu Heping, Liu Qing, Zhang Wei, et al. Random PWM technique for acoustic noise and vibration reduction in induction motors used by electric vehicles[J]. Transactions of China Electrotechnical Society, 2019, 34(7): 1488-1495.
[6] Lai Y S, Chang Y T, Chen Boyuan. Novel random- switching PWM technique with constant sampling frequency and constant inductor average current for digitally controlled converter[J]. IEEE Transactions on Industrial Electronics, 2013, 60(8): 3126-3135.
[7] 李國華, 劉春武, 汪玉鳳. 單相逆變器隨機PWM選擇性消諧滯環隨機擴頻方法[J]. 電工技術學報, 2021, 36(6): 1279-1289.
Li Guohua, Liu Chunwu, Wang Yufeng. A novel hysteresis random spread-spectrum method in random PWM selective harmonic elimination for single-phase inverter[J]. Transactions of China Electrotechnical Society, 2021, 36(6): 1279-1289.
[8] 黃鵬, 劉和平, 苗軼如, 等. 基于感應電機電流紋波峰值的可變開關頻率脈沖寬度調制[J]. 電工技術學報, 2020, 35(20): 4373-4383.
Huang Peng, Liu Heping, Miao Yiru, et al. Variable switching frequency pulse width modulation for induction motors based on current ripple peak value[J]. Transactions of China Electrotechnical Society, 2020, 35(20): 4373-4383.
[9] 劉和平, 董治平, 邱斌斌, 等. 電壓型逆變器分段死區補償調制策略[J]. 電機與控制學報, 2020, 24(9): 30-38.
Liu Heping, Dong Zhiping, Qiu Binbin, et al. Compensation method for nonlinear factors of inverter for low voltage electric vehicle[J]. Electric Machines and Control, 2020, 24(9): 30-38.
[10] Hwang S H, Kim J M. Dead time compensation method for voltage-fed PWM inverter[J]. IEEE Transactions on Energy Conversion, 2010, 25(1): 1-10.
[11] Kobayashi T, Tajima F, Ito M, et al. Effects of slot combination on acoustic noise from induction motors[J]. IEEE Transactions on Magnetics, 1997, 33(2): 2101-2104.
[12] Zhang Zhendong, Xu Longya. Dead-time com- pensation of inverters considering snubber and parasitic capacitance[J]. IEEE Transactions on Power Electronics, 2014, 29(6): 3179-3187.
[13] 劉和平, 路瑩超, 王華斌, 等. 電壓型逆變器分段死區補償調制策略[J]. 電機與控制學報, 2018, 22(3): 25-32.
Liu Heping, Lu Yingchao, Wang Huabin, et al. Dead- time compensation modulation strategy of subsection integrated in voltage source inverter[J]. Electric Machines and Control, 2018, 22(3): 25-32.
[14] Guo Qiang, Dong Zhiping, Liu Heping, et al. Nonlinear characteristics compensation of inverter for low-voltage delta-connected induction motor[J]. Energies, 2020, 13(3): 590.
[15] 廖勇, 甄帥, 劉刃, 等. 用諧波注入抑制永磁同步電機轉矩脈動[J]. 中國電機工程學報, 2011, 31(21): 119-127.
Liao Yong, Zhen Shuai, Liu Ren, et al. Torque ripple suppression of permanent magnet synchronous motor by the harmonic injection[J]. Proceedings of the CSEE, 2011, 31(21): 119-127.
[16] Wu Zhaoqian, Ding Kang, Yang Zhijian, et al. Analytical prediction and minimization of deadtime- related harmonics in permanent magnet synchronous motor[J]. IEEE Transactions on Industrial Electronics, 2021, 68(9): 7736-7746.
[17] 羅辭勇, 王英豪, 王衛耀, 等. 單相特定諧波消除脈寬調制高頻逆變器的死區補償策略[J]. 電工技術學報, 2017, 32(14): 155-164.
Luo Ciyong, Wang Yinghao, Wang Weiyao, et al. Study of dead-time compensation strategy in selective harmonic elimination PWM inverter[J]. Transactions of China Electrotechnical Society, 2017, 32(14): 155-164.
[18] Lee J H, Sul S K. Inverter nonlinearity compensation through deadtime effect estimation[J]. IEEE Transa- ctions on Power Electronics, 2021, 36(9): 10684- 10694.
Low Frequency Resonance Reduction Method of Induction Motor Used by Electric Vehicle Based on Sixth Harmonic Suppression in dq Coordinate
1,222,323
(1. College of Electronic Information and Electrical Engineering Changsha University Changsha 410022 China 2. College of Electrical and Information Engineering Hunan University Changsha 410082 China 3. State Key Laboratory of Power Transmission Equipment & System Security and New Technology Chongqing University Chongqing 400044 China)
The development of electric vehicles (EVs) is an effective means to solve energy and environmental problems and achieve the goals of “carbon peaking” and “carbon neutrality”. However, the motor drive system in EVs faces severe vibration and noise issues. If the harmonics in the stator current align with the natural frequency of the motor, motor resonance can occur. In an ideal situation, the inverter line voltage and stator current only have sideband harmonics distributed near the fundamental and switching frequencies and their multiples. However, nonlinear factors such as the conduction voltage drop, snubber capacitance, and dead time are added during the modulation process to prevent bridge arm direct connection in the inverter, causing low harmonic distortion of the stator current. In addition, the inherent frequency of induction motors used in EVs is low, and the motor commonly operates over a wide speed range. The low harmonic generated during the modulation process can coincide with the inherent frequency of the motor, resulting in low-frequency resonance.
To suppress the low-order harmonic of the stator current, firstly, the simulation and test method of the natural frequency of the induction motor (IM) is studied, and the natural frequency range of the IM is determined. Then, based on harmonic distortion characteristics caused by dead time and tube voltage drop, a sixth harmonic controller is added to the current inner loop of the vector control system after rotor flux orientation (dq coordinate). Combined with bode plots and pole distribution diagrams, the optimal parameters of the harmonic controller are obtained according to the stability and harmonic suppression characteristics. Finally, the simulation model and experimental platform are established considering current FFT analysis results, power spectral density, and vibration experimental data under four operating conditions (low speed, no load, rated speed, and high speed). Compared with the compensation method of the pulse duration and inverter nonlinearity feedforward, it is proved that suppressing the sixth harmonic in the dq coordinate effectively reduces the fifth and seventh harmonics of the stator current and vibration power of the IM at its natural frequency.
The feasibility and correctness of the proposed method can be certified by the simulation and experimental results, and the conclusions are as follows.
(1) The dead time and voltage drop between the switch and diode can generate nonlinear errors in the output voltage of the inverter. The current inner loop PI controller based on rotor flux orientation cannot suppress the fifth and seventh harmonic distortion of the stator current caused by nonlinear voltage.
(2) The fifth and seventh harmonics in the stator current are transformed into the sixth harmonics in the dq coordinate system. The sixth harmonic controller can effectively suppress the disturbance of nonlinear voltage without generating other harmonic distortion and does not affect the control performance.
(3) Compared with the offline feedforward compensation method, the sixth harmonic controller proposed in this paper belongs to a specific frequency harmonic feedback control method. The harmonic controller can adaptively suppress the sixth harmonic component in the stator voltage under the dq coordinate system and has a good control performance.
Induction motor (IM), low frequency resonance, low harmonic distortion, control strategy, dead-time
TM46
10.19595/j.cnki.1000-6753.tces.220953
國家自然科學基金項目(52077011, 52277034)、湖南省教育廳項目(22A0603)和長沙市重大科技專項項目(kq2105001)資助。
2022-05-30
2023-02-01
馮 婉 女,1984年生,博士,講師,研究方向為電力電子與電機控制技術。E-mail: fengwan@hnu.edu.cn
張文娟 女,1986年生,博士,教授,研究方向為高性能永磁電機的設計與控制。E-mail: Z20141074@ccsu.edu.cn(通信作者)
(編輯 崔文靜)