潛油直線電機柔性閉環(huán)控制技術研究
2023-12-25 07:54:06錢坤蔡萌孫延安宋興良鄭東志盧成國
化工自動化及儀表 2023年6期
錢坤 蔡萌 孫延安 宋興良 鄭東志 盧成國

作者簡介:錢坤(1988-),高級工程師,博士研究生,從事高效節(jié)能舉升新技術新裝備研發(fā)與應用的研究,qk13836956215@163.com。
引用本文:錢坤,蔡萌,孫延安. 潛油直線電機柔性閉環(huán)控制技術研究[J].化工自動化及儀表,2023,50(6):000-000.
DOI:10.20030/j.cnki.1000-3932.202306000
摘? 要? 針對潛油直線電機,設計了一種柔性閉環(huán)控制方法。依據(jù)潛油直線電機自適應法與轉速觀測器法相結合的控制策略,適時引用井下壓力傳感器的反饋,改善電機失步監(jiān)測效果,提高閉環(huán)控制精度和自適應調參能力。通過利用該控制技術,電機在相同工作頻率、電壓、運行速度的試驗條件下,推力提升20%以上,電機振動幅度降低50.26%,在現(xiàn)場相同工況條件下,電機系統(tǒng)效率提高29.67%以上。
關鍵詞? 柔性控制? 潛油直線電機? 系統(tǒng)振動
中圖分類號? TP273? ? ? ?文獻標志碼? A? ? ? ? 文章編號? 1000-3932(2023)06-0000-00
直線電機經過數(shù)十年的發(fā)展,無論在電磁計算還是制造工藝上都有了比較成熟的理論基礎和實踐經驗。現(xiàn)在,直線電機在無桿采油中的應用越來越廣泛,但由于該應用領域對電機的機械結構和可靠性要求很高,所需驅動負載的特性變化復雜,導致電機設計方案和控制技術不是十分完善,使得現(xiàn)有的潛油柱塞泵用圓筒型直線電機的效率、推力等指標均未達到一個較為理想的水平,即電機的有效功率密度和推力密度指標過低,同體積下的性能指標無法滿足采油現(xiàn)場的需要[1~3]。因此,針對油田采油領域的應用要求,設計開發(fā)高性能的電機及驅動控制技術可在一定程度上彌補直線電機及其控制技術在該應用領域的缺陷。同時,通過技術改進和系統(tǒng)優(yōu)化設計,提高潛油柱塞泵的運行可靠性,延長其運行和檢修周期,提高系統(tǒng)運行效率,可在很大程度上達到節(jié)能降耗減排的目的,具有可觀的經濟效益。
目前永磁電機(無啟動繞組)在控制方式上分為兩種:一種是有感控制方式,即通過在電機上安裝轉子位置傳感器,使得電機控制器能夠實時掌握電機轉子的位置狀態(tài),并根據(jù)轉子的位置狀態(tài)調整定子三相繞組的通電順序、通電時間及換相頻率等指標,驅動永磁電機平穩(wěn)運行。這種控制方式由于建立了電機與控制系統(tǒng)的閉環(huán)回路,安全可靠,控制精度高,但對傳感器的依賴性太高,可靠性較差。另一種是無感控制方式,即無需在電機上安裝任何傳感器,控制系統(tǒng)對電機轉子運行狀態(tài)和磁極位置的感知通過控制軟件自身的特殊算法來實現(xiàn)。這種控制方式取消了傳感器,減少了故障點,大幅提高了電機運行的可靠性,拓展了永磁電機的應用領域。然而,無感控制技術對轉子狀態(tài)的感知是通過軟件計算實現(xiàn)的,精度較差且反應速度較慢(需要運算時間),如果軟件存在漏洞則易出現(xiàn)電機失控、飛車等故障[4,5]。
在潛油永磁直線電機領域,以上兩種控制方式現(xiàn)在都在應用。由于電機安裝在千米左右的油井井下,電機的動力電纜和信號電纜都需要到達千米左右的長度,造成動力電纜壓降損失,信號電纜傳輸?shù)男盘査p甚至消失,控制器所必須的運行條件無法建立[6,7]。有感控制方式為解決轉子位置信號傳輸問題,將電機控制系統(tǒng)的信號處理部分安裝在電機本體上,與電機一同下入井底,解決了信號遠距離傳輸?shù)膯栴},這種方式無疑是最佳控制方案。但由于井下的應用環(huán)境惡劣,相對于電機而言,轉子位置信號處理系統(tǒng)屬于微電子產品,無法長期耐受高溫、高壓的環(huán)境,其使用壽命必然大打折扣,這就從根本上影響了電機的使用壽命,縮短了檢修周期,增加了維護成本,不利于現(xiàn)場大規(guī)模應用。另外一種無感控制方式也被應用于潛油永磁直線電機,但由于無感控制技術不成熟,導致電機空載電流過大,電機效率和功率因數(shù)極低。這種無感控制技術在使用效果上等同于普通變頻器硬性驅動永磁電機,所反映的效果為:電機空載、負載運行電流大,振動、噪音、發(fā)熱嚴重,過載能力小。旋轉型永磁電機的無感控制方式是近幾年才開始研究和發(fā)展的,由于其技術不成熟,存在控制精度低、對電機運行狀態(tài)監(jiān)控不準確、長距離傳輸易產生信號丟失等缺點,國內外能做到比較穩(wěn)定可靠的無感控制的廠家屈指可數(shù)。
柔性閉環(huán)控制技術是以矢量驅動技術為基礎的無感驅動控制技術,矢量驅動是控制類電機,尤其是伺服電機比較常用的一種精度較高的控制策略。通過建立直線電機狀態(tài)方程,用數(shù)學方法分別將驅動電機運行的電流、電壓解耦,區(qū)分出有功和無功分量,然后單獨進行分量控制,使電機按照負載要求在最優(yōu)條件下運行。矢量驅動方式從發(fā)明到發(fā)展再到成熟已經歷了數(shù)十年,對于感應電機和帶傳感器的永磁電機而言是一項穩(wěn)定可靠的技術。柔性閉環(huán)控制技術的核心就是長距離無感矢量控制技術,其在矢量控制的基礎上引入無感控制技術,電機與控制器之間完全通過軟件的方法實現(xiàn)閉環(huán)[8]。這種控制方式在普通應用場合下的旋轉電機上得到了較好的控制效果。由于應用井深要求的限制,所謂長距離就是指電機與控制器之間的連接電纜長度超過100 m。眾所周知,在通常狀態(tài)下,與電機電阻和電感相比,電纜內阻和電感很小,可以忽略不計。由于電纜電阻和電感所引起的電機電壓、電流的變化微乎其微,對控制精度也不會產生任何影響。當電纜長度超過100 m時,由于長線電纜的分布特性,即存在漏電感和耦合電容,PWM逆變器的輸出脈沖經過長線電纜這種傳輸線傳至電動機,會產生電壓反射現(xiàn)象,從而導致在電動機端產生過電壓、高頻阻尼振蕩[9,10]。
筆者的目的是針對現(xiàn)有的潛油直線電機存在的推力密度低、運行沖擊振動嚴重等問題,進行柔性驅動控制技術研究開發(fā),主要依據(jù)潛油直線電機自適應法與轉速觀測器法相結合的控制策略,適時引用井下壓力傳感器的反饋,改善電機失步監(jiān)測效果,提高閉環(huán)控制精度和自適應調參能力。
1? 長距離無感矢量驅動控制技術優(yōu)化和柔性控制技術研究
采用長線電纜時,逆變器和電動機之間傳輸?shù)腜WM脈沖與傳輸線上行波的情況類似。PWM脈沖作為正向行波(或入射波),由逆變器傳向電動機,在電動機端反射后產生反向行波(或反射波)傳向逆變器。其反射機理可看作是一面鏡子對正向行波V+反射產生一個反射波V-,V-作為V+的鏡像,等于V+乘以電壓反射系數(shù)。終端(負載端)反射系數(shù)N2為:
(1)
其中,為負載(電動機)阻抗;為電纜特性阻抗,、分別是電纜單位長度電感、電容。
起端電壓反射系數(shù)N1為:
(2)
其中,是起端電阻,一般,則。
在逆變器端,反射后得到的正向行波與傳輸來的反向行波波形相同,但幅值變?yōu)榉聪蛐胁ǖ谋丁6肷洳ū环瓷浜蟮玫降姆瓷洳▊飨蚰孀兤鳎瓷洳ǖ闹档扔谄渲党艘载撦d反射系數(shù),由于電動機的繞組電感很大,即,由式(2)可知,入射波與反射波疊加使電動機端電壓近似加倍。這種電壓反射現(xiàn)象與逆變器輸出脈沖的上升時間以及電纜的長度有關。逆變器輸出脈沖上升時間越小,電纜越長,電壓反射現(xiàn)象越明顯。
對于電機自身而言,這種放大了數(shù)倍的脈沖電壓和高頻諧波將對其絕緣結構造成不可修復的損傷,甚至損壞定子繞組。對于控制器而言,雖然這種反射電壓只作用于電機端,但由于電機轉子位置信息是依靠電纜上傳輸過來的電機定子反電勢信號解析出來的,反射電壓的存在對電機真實反電勢信息必然產生影響,從而導致控制器對電機轉子信息判斷失誤,電機失控。因此,長距離無感矢量控制需要綜合考慮各方面的因素,尤其是抑制電壓反射,消除電壓反射對控制上的影響更是解決問題的關鍵。
柔性驅動控制技術是專有技術,已廣泛應用于游梁式抽油機的控制中。該技術與長距離矢量驅動技術的區(qū)別在于:長距離矢量驅動技術是基本的電機驅動技術,是在常規(guī)的矢量控制(與矢量變頻技術相類似)基礎之上針對超長電源線開發(fā)的專用控制技術;而柔性驅動控制技術則是一種高級控制技術,是專門針對變頻驅動單元(含電機及變頻器)研究開發(fā)的上位機控制技術,其特點在于可根據(jù)負載的不同狀態(tài)實時調整電機做功電流,使電機按需做功、按需運行,最大限度地降低了電機的無功損耗,使電機自身較硬的機械特性適應原油開采的實際要求。其實施的前提條件是變頻驅動單元具備基本的變頻調速控制技術[11]。
2? 潛油柱塞泵永磁直線電機無感控制策略
對于電動機無速度傳感器矢量控制的實現(xiàn)方式主要有如下幾個通用方法:直接計算法、模型參考自適應法、轉速觀測器法、磁鏈觀測器法、信號注入法及人工智能方法等。這些方法在不同的系統(tǒng)中各有長處與短處,根據(jù)油田直線電機系統(tǒng)的使用環(huán)境,確定的方案是模型參考自適應法與轉速觀測器法相結合的控制策略。所謂自適應控制是對于系統(tǒng)無法預知的變化,能自動地不斷使系統(tǒng)保持所希望的狀態(tài)。因此,一個自適應控制系統(tǒng)應能在其運行過程中通過不斷地測取系統(tǒng)的輸入、狀態(tài)、輸出或性能參數(shù),逐漸地了解和掌握對象,然后根據(jù)所獲得的過程信息,按一定的設計方法,作出控制決策去修正控制器的結構、參數(shù)或控制作用,以便在某種意義下,使控制效果達到最優(yōu)或近似更優(yōu)。自適應控制系統(tǒng)的基本結構框圖如圖1所示。
矢量控制實現(xiàn)的基本原理(圖2)是通過測量和控制電動機定子電流矢量,根據(jù)磁場定向原理分別對電動機的勵磁電流和轉矩電流進行控制,從而達到控制電動機轉矩的目的。實現(xiàn)上是通過將電流首先做3/2變換,變成靜止的d-q坐標,然后通過前面介紹的無感自適應理論計算出電機磁場的相位,將電流分離出轉矩電流分量和磁場電流分量,這樣就實現(xiàn)了解耦控制、矢量控制,電機可以在最高效的狀態(tài)下運行,實時根據(jù)負載變化調節(jié)電流,提高整個系統(tǒng)的功率因素,尤其是在長線驅動場合下,可以降低電纜的線損,提高電機的啟動轉矩。
2.1? 長距離無感矢量控制核心軟件構成
為實現(xiàn)直線電機無感控制下的穩(wěn)定運行,專用控制器中的核心算法部分區(qū)別于普通無感控制器,對電機電壓、電流環(huán)及速度環(huán)重新構建計算程序,針對直線電機超大阻抗、感抗特性對控制算法進行細化處理。
在軟件系統(tǒng)中實現(xiàn)了對直線電機的矢量控制,在控制算法中包含了對應的永磁電機的各個物理參數(shù),如電機的磁場、相電阻、電感及功率等,控制方式上采取高精度的電流矢量控制。但是在實際的試驗中發(fā)現(xiàn)電機在運行過程中,電機數(shù)學模型的各個參數(shù)變化范圍很大,這些參數(shù)和模型的變化將引起控制系統(tǒng)性能的降低,筆者通過一個高階的觀測器算法實現(xiàn)了電機參數(shù)的自適應,系統(tǒng)在運行過程中可根據(jù)系統(tǒng)本身的時間常數(shù)對電機參數(shù)進行觀測,從而實現(xiàn)了對電機電流的準確解耦,另外通過對電機電阻的準確評估,甚至可以估算出電機當前的定子溫度。
2.2? 長電纜反射電壓抑制技術
正常條件下當動力電纜長度超過100 m時將會在電機端產生電壓反射現(xiàn)象,嚴重的電壓反射將損壞電機絕緣結構或系統(tǒng)的絕緣薄弱環(huán)節(jié)。
普通電機一般采用散嵌線工藝,同一槽內往往存在兩組不同相序的線圈,定子繞組的端部也是三相繞組的線圈相互疊加在一起,形成了絕緣上的薄弱點。由于潛油直線電機采用的是容錯式結構,即初級繞組線圈相與相之間完全隔離,處于不同的沖片槽中,每個槽中的繞組線圈也都同屬于一組線圈,因此潛油直線電機的繞組絕緣結構相比于普通電機來說可靠性有了絕對性的提高。
潛油直線電機的動力電纜長度往往在千米左右,其產生的反射電壓值也會很高。在電機與電纜組成的系統(tǒng)中,絕緣薄弱點將是反射電壓作用的主要部位。與容錯性較高的直線電機初級絕緣結構相比,電機繞組線與電纜連接處的絕緣結構相對薄弱一些,且由于三相電纜線同處于一個鎧裝的空間內,反射電壓極易在此部位造成相間擊穿現(xiàn)象。瞬間的尖峰值電壓會將兩相之間的二次處理的絕緣層擊穿并產生局部高溫現(xiàn)象,燒毀連接線。
為解決上述問題,平抑反射電壓,筆者在進行控制器軟硬件設計時內置了輸出高階有源濾波系統(tǒng)。有源濾波系統(tǒng)的增加對平抑反射電壓有很強的作用,但同時由于控制器的工作方式為無感矢量控制,有源濾波系統(tǒng)的存在必將干擾控制器對電機各項參數(shù)指標的檢測和通過實時反電動勢推算次級磁極位置的精度。為此筆者在軟件內部做了精細化處理,將有源濾波器的參數(shù)指標作為常量固化到程序之中,由此所引起的其他感應變量也通過建立合理的運算模型將其轉化為常量因子。
為檢測反射電壓抑制技術的實際效果和對電機運行所產生的影響,筆者通過電機的空載試驗進行了一系列驗證,分別在控制器輸出端和電機輸入端檢測電壓和電流波形,檢測結果如圖3~10所示,從檢測結果來看效果十分明顯。
由以上圖形可以明顯看出:在控制器中內嵌有源濾波電路后無論是控制器輸出端還是電機輸入端,其電壓波形由典型的變頻器輸出PWM波形改善為標準正弦波形。電壓波形中的高頻諧波成分明顯減少,反射電壓的典型代表——尖峰脈沖基本消失。另外,從電流波形來看,加裝濾波電路后電流波形在電機輸入端干擾性毛刺明顯減少但波形基本形狀不變,可見電流輸出正常,電機運行狀態(tài)反饋正常,有源濾波器對于控制電路和控制策略沒有任何影響。
2.3? 柔性閉環(huán)控制技術在直線電機控制上的嵌入和應用
柔性控制技術是比較成熟的電機控制技術,在普通旋轉電機上的應用收到了良好的效果。潛油直線電機的運行同樣存在S曲線的特征,將柔性控制技術引入潛油直線電機的控制中是提高潛油柱塞泵系統(tǒng)效率、減少附加損耗的有效方法。為此在無感矢量控制程序中嵌入柔性控制算法,通過PID的高級智能調節(jié)實現(xiàn):自動生成全沖程內的最佳運行速度分布和輸出功率分布方案,并能根據(jù)工況的變化情況自動完成運行方案的優(yōu)化調整;全程圍繞最佳速度分布和功率輸出分布預案做持續(xù)無級變速運行;自動追蹤負荷功率與運行速度,并隨動做出動態(tài)主動變速運行響應;實現(xiàn)柔性啟動、柔性運行、軟剎車等功能,從而形成閉環(huán)控制。
潛油直線電機柔性閉環(huán)控制裝置具有的基本功能和高級功能見表1。
2.4? 柔性閉環(huán)控制技術室內試驗
為直觀判斷柔性技術的性能指標,首先利用柔性控制裝置驅動單節(jié)直線電機,試驗原理如圖11所示,與普通控制技術相比較的試驗數(shù)據(jù)見表2。
由表2可以看出,在驅動相同電機的前提下,柔性閉環(huán)控制時電機輸入電壓明顯下降,同等輸入電流條件下,輸入電壓明顯降低,有用功顯著提升。
直線電機整機室內試驗平臺如圖12所示,試驗通過負載油缸的阻尼作用模擬加載運行,運行期間的直線電機通過循環(huán)水噴淋水槽進行冷卻,測試直線電機在柔性控制和常規(guī)控制條件下的電參數(shù)。試驗給定相關數(shù)據(jù)如下:
沖程? 1.23 m
沖次? 8 min-1
井口壓力? 8 MPa
排量? 35 m3/s
電機推力? 1.22 t
圖12? 直線電機推力及振動檢測試驗平臺示意圖
1——水閥;2——水泵;3——噴淋水槽;4——噴淋水管;5——直線電機;6——供電電纜;7——控制柜;8——推力位移傳感器;9——推力測試聯(lián)接裝置;10——支架;11——蹩壓閥;12——負載油缸;13——液壓油槽;14——壓力軟管
對比試驗結果如圖13~15所示,檢測數(shù)據(jù)見表3。
通過試驗數(shù)據(jù)和曲線可以看出,采用柔性控制后,同工況、相同電機推力條件下,最大電流和平均電流大幅降低,降幅分別為53.94%和44.73%。同時,系統(tǒng)振動也大幅減弱,常規(guī)控制時振動頻域曲線的最大值為0.577 m/s2,采用柔性控制后電機振動頻域曲線最大值為0.287 m/s2,降幅50.26%。
2.5? 柔性閉環(huán)控制技術現(xiàn)場試驗
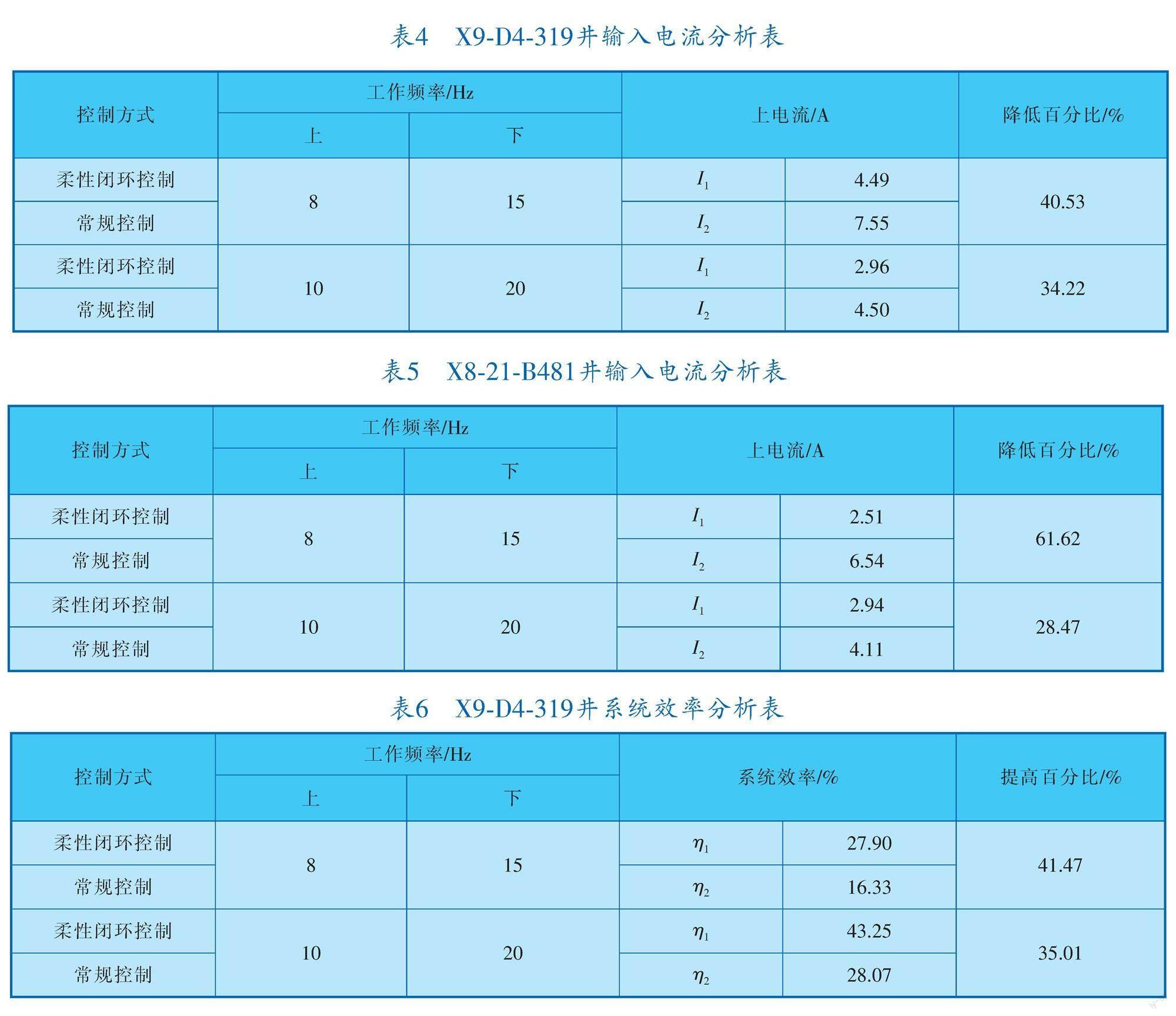
選取采油五廠X9-D4-319和X8-21-B481兩口生產井分別采用常規(guī)控制和柔性閉環(huán)控制技術進行比較測試,測試數(shù)據(jù)見表4~7。
從以上數(shù)據(jù)可以看出,柔性控制比常規(guī)控制在相同工作頻率、電壓、運行速度條件下,兩口試驗井直線電機電流分別降低34.22%、28.47%以上,系統(tǒng)效率分別提升了35.01%、29.67%以上。
3? 結束語
與普通旋轉電機相比,潛油直線電機較高的阻抗、感抗值使電機的磁極位置、運行狀態(tài)等信息的捕捉難度加大,普通直線電機用變頻器的通用型控制算法無法有效地按既定程序控制電機正常運行,有時甚至無法正常空載運行。筆者針對潛油直線電機,設計了一種柔性閉環(huán)控制方法。改善了電機失步監(jiān)測效果,提高了閉環(huán)控制精度和自適應調參能力。經過試驗驗證,筆者提出的控制算法具有良好控制效果。
參? 考? 文? 獻
[1] 宗景富.低產油井用節(jié)能隔膜潛油電泵[J].國外油田工程,1996(12):37-40.
[2] 楊野.大慶油田機械采油節(jié)能技術現(xiàn)狀及展望[J].機電工程技術,2010,39(11):132-135;146.
[3] 李曉慧,王衛(wèi)東.變頻器引接電纜中的高次諧波影響及抑制[J].微計算機信息,2006,22(6):161-163.
[4] 李曉,王璁,屠幼萍.電機驅動用長電纜破壞機理分析及防護[J].電氣傳動,2014,44(4):72-76.
[5] 張椿,戴鵬,宗偉林,等.長電纜傳輸脈沖波對電機端過電壓影響的研究[J].電氣傳動,2013,43(2):36-39.
[6] 張銘鈞,董振剛,張丙良.潛油電泵機組及井下傳感器狀態(tài)監(jiān)測技術研究[J].電機與控制學報,2009,13(1):28-33.
[7] 杜鵬.井下多狀態(tài)參數(shù)監(jiān)測系統(tǒng)的研究[D].沈陽:沈陽工業(yè)大學,2013.
[8] 鄭剛,王尚衛(wèi),姚洋,等.井下直線電機無桿采油及配套技術在長慶超低滲透油藏的應用[J].石油天然氣學報,2013,35(1):158-160;178.
[9] 王順華,趙洪濤,尚慶軍,等.直線潛油電泵舉升工藝技術及應用[J].石油鉆探技術,2010,38(3):95-97.
[10] LIU Y H, YU Z W,ZENG M,et al.LLE for submersible plunger pump fault diagnosis via joint wavelet and SVD approach[J].Neurocomputing,2016,185(C):202-211.
[11] 邵克勇,錢坤,劉遠紅,等.基于間接示功圖測量的電潛柱塞泵故障診斷研究與應用[J].化工自動化及儀表,2014,41(9):1023-1027;1100.
(收稿日期:2023-07-07,修回日期:2023-10-08)
