定子無鐵心永磁無刷直流電機驅動拓撲設計方案及對比
2023-12-26 03:29:14李昊巖許海平
電工技術學報 2023年24期
李昊巖 許海平,3 陳 曦,3
定子無鐵心永磁無刷直流電機驅動拓撲設計方案及對比
李昊巖1,2許海平1,2,3陳 曦1,2,3
(1. 中國科學院電工研究所中國科學院電力電子與電氣驅動重點實驗室 北京 100190 2. 中國科學院大學 北京 100049 3. 齊魯中科電工先進電磁驅動技術研究院 濟南 250100)
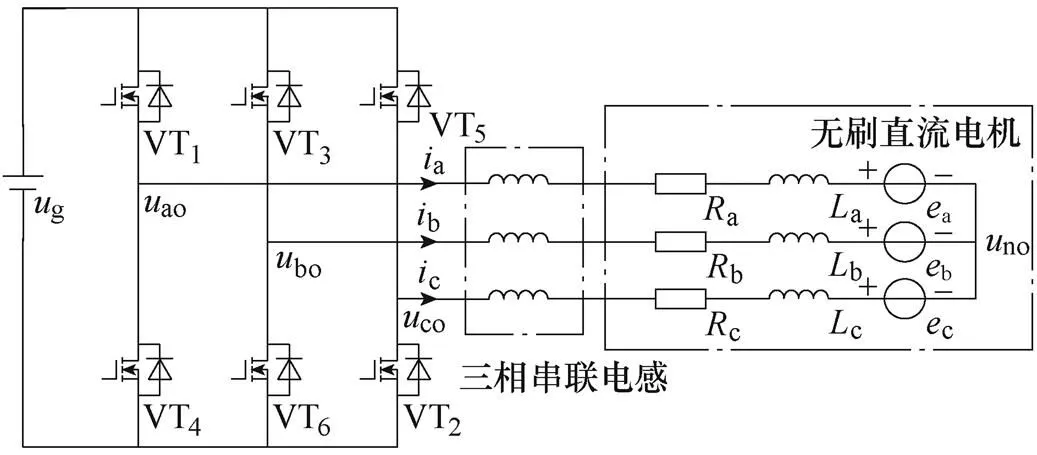
單級三相全橋驅動拓撲無法保證力矩控制模式的定子無鐵心永磁無刷直流電機在全電流指令范圍內電樞電流連續。采用增加電樞回路等效電氣時間常數的思路,選取Buck+半橋、全橋串聯電感、Buck+全橋三種驅動拓撲,對三種驅動拓撲保證電機正常運行的條件以及不同驅動拓撲的固有屬性進行理論分析、說明和對比。在基于數字控制器的三種驅動平臺上,使用同一臺電機進行實驗驗證。實驗結果表明,三種驅動拓撲均能保證電機的正常運行,實測電流波形證明了關于拓撲特點的理論分析的合理性。對三種驅動拓撲實測穩態運行性能進行了詳細的數學分析,為小功率無鐵心永磁無刷直流電機的工程應用提供了參考依據。
定子無鐵心 永磁無刷直流電機 Buck+半橋 全橋串聯電感 Buck+全橋
0 引言
反作用飛輪或動量輪是一種衛星姿態控制的執行機構。通過控制電機的電能流動方向,使衛星受到沿電機軸向的反作用力矩。多個動量輪組合可實現衛星的三軸姿態穩定[1]。由于電機工作在空間環境,氣動阻力可忽略不計;軸承加工及潤滑技術的發展保證了動量輪軸承在長壽命中維持極低的摩擦阻力。根據需求,期望動量輪的輸出力矩大范圍連續可調,但并不需要較大功率的輸出,因此電機工作在力矩控制模式下的空載狀態。
無刷直流電機(Brushless Direct Current Motor, BLDCM)因其具有結構簡單、效率高、功率密度高、壽命長、機械性能好等優點,被廣泛地應用于新能源汽車、醫療器械、航空航天、船舶推進、風力發電等多種功率等級的領域[2-6]。近年來出現的定子無鐵心設計具有以下優點:①消除了定子鐵心損耗和渦流損耗[7],意味著在一定程度上提升了電機的功率密度;②由于定子受力繞組的支撐部件使用非導磁復合材料制成,采用無齒槽設計進一步消除了定子槽引起的磁鏈諧波[8]及由永磁體和定子鐵心作用引起的齒槽轉矩[9];③定子繞組不再受到定子齒槽的約束,繞組的設計和安裝更加靈活,無鐵心電機氣隙較大,定子繞組反電動勢分布引起的諧波可忽略不計[10],同時大氣隙意味著在大的電樞電流激勵下難以產生磁飽和情況,在定子繞組散熱允許的條件下,電機具有強過載能力;④定子無鐵心設計在尺寸和質量上具有優勢。因此無鐵心電機適用于小功率空載模式的空間應用。
但是,無鐵心電機電感值極小,僅有幾個到幾十個mH。小功率的無鐵心電機會產生很大的電流脈動,給電機繞組的相電流帶來高次諧波,電機驅動在開關頻率較低、輸出電流較小的時候會存在電流斷續的問題,嚴重時會導致電機無法正常運行,甚至在起動過程中,電樞繞組發生直通短路,損毀控制器或燒毀電機定子繞組[7]。
根據文獻[7],為解決無法正常運行的問題,小電感電機的控制通常有以下四種改進思路:①高開關頻率寬禁帶功率器件逆變器控制;②電壓源型逆變器串聯諧波濾波器控制;③電流源型逆變器控制;④多電平逆變器控制。
高開關頻率寬禁帶功率器件逆變器是指不改變三相全橋驅動拓撲,僅通過大幅提升開關頻率來維持電流的連續。文獻[11]為將電機電流峰峰值限制在額定電流的10%,將開關頻率選取為100 kHz。文獻[12]為抑制小電感電機在換相區的轉矩脈動,重疊換向控制的開關頻率為200 kHz。為保證電樞繞組電流連續,使用的開關頻率會大幅增加[13],這導致開關損耗急劇上升,進而減少半導體器件壽命,降低了可靠性[14]。
電壓源型逆變器串聯諧波濾波器控制是指在三相全橋逆變器的基礎上,額外增加一組濾波器,增大系統的電氣時間常數。這種方式通常像文獻[15-16]一樣,使用由電感、電容構成的濾波器對脈沖寬度調制(Pulse Width Modulation, PWM)斬波輸出進行濾波。但是,增加一組濾波器后,需要經過計算,以防止造成系統的不穩定。等效相電感增大又會導致換相區續流時間延長,當電機轉速提高時,換相區對一拍工作區間占比增大,若不加以控制,電機內部長時間存在不控環流。大電感降低了電流控制響應,傳統大電感電機在高速時電流滯后導致的轉矩性能下降等問題又將浮現。另外,額外三個功率電感增加了體積和成本。
電流源型逆變器是在三相逆變直流母線側增加前級DC-DC變換器。前級電流型變換器做電流閉環控制,輸出穩定電流,根據電機轉速調壓,實現后級逆變器的脈沖幅度調制(Pulse Amplitude Modulation, PAM)控制,同時極大地削弱了單級式全橋拓撲PWM斬波引起的轉矩脈動。后級電流型逆變器僅起換相的作用。因此,可使用三相全橋或三相半橋等多種拓撲。現如今很多文獻都采用雙級式驅動拓撲方案來驅動無鐵心無刷直流電機。文獻[17-19]皆使用Buck變換器作為前級電路,Buck變換器功率電感兼具濾波作用,因此是小電感電機雙級式驅動拓撲中最常用的前級電路。文獻[20]中使用Boost作為前級電路,用作對直流母線電壓進行升壓,主要實現高速應用。文獻[21]提出使用Sepic變換器作為前級電路,用來調節直流母線電壓以解決換相區的脈動問題。文獻[22]使用Cuk變換器作為前級電路,并進一步使用三電平中點鉗位逆變器來代替兩電平逆變器。文獻[23-24]針對大功率盤式無鐵心電機設計了前級斬波電路,可有效削弱轉矩脈動。
多電平逆變器通常適用于大功率電機,多級階梯電壓輸出方式可以針對電機轉速,給定合適的電壓幅值,文獻[11]使用二極管鉗位三電平逆變器電路拓撲驅動小電感電機。但針對小功率電機,尤其是電壓等級低的電機應用較少。
除上述針對基本驅動拓撲的研究外,自文獻[25]開始,現有文獻對無刷直流電機的研究[22, 25-30]大多針對大電感直流無刷電機換相區的轉矩脈動,且出于標準梯形波反電動勢的假設。但無鐵心電機換相區很短,與普通無刷直流電機性能的優化方法存在一定差別。本文針對使用Halbach[31]方案設計的非理想反電動勢無鐵心電機電流脈動大的特點,驅動拓撲的改進思路就是增加整個系統的電機時間常數。其中雙級式驅動拓撲選擇Buck變換器作為前級電路,利用其輸出濾波電感為后級逆變器提供穩定電流并根據轉速調壓,后級電流型逆變器分別選擇三相半橋和三相全橋拓撲用以對比。同時研究單級三相全橋級聯電感器的拓撲的可行性。
分析三種驅動拓撲的特點。首先,從理論上分析單級全橋拓撲電流斷續的問題;然后,根據增加電樞回路等效時間常數的思路,提出不同拓撲的改進方法,并進一步分析三種拓撲的數學模型;最后,使用平均電流控制,分析三種拓撲驅動同一臺無鐵心直流無刷電機,在穩定工作時的性能并加以對比。
根據開關管數量的不同,在后文中用“B3”表示三相半橋拓撲,用“B6”表示三相全橋拓撲。
1 無鐵心電機驅動正常運行分析
1.1 三種驅動拓撲的基本區別
與傳統單級B6拓撲相比,Buck變換器級聯B3拓撲節省了逆變器的三個上橋臂功率開關管及其驅動,但多增加了Buck變換器的一對上下開關管及其驅動。Buck變換器級聯B6拓撲則在傳統的單級B6拓撲基礎上增加前級變換器的兩個開關管,體積和成本最高。



(a)Buck+三相半橋拓撲
(b)B6串聯電感拓撲

(c)Buck+三相全橋拓撲
圖1 三種驅動拓撲電路
Fig.1 Circuits of three drive topologies
1.2 無鐵心無刷直流電機電流連續開關頻率條件
1.2.1 H_PWM-L_PWM控制B6拓撲
無鐵心電機的電樞時間常數小,具備優異的瞬態響應性能,更適用于高速應用場合,但是,電樞電感值很小導致電樞電流變化率很大。因此,與有鐵心電機相比,無鐵心電機電樞電流脈動大,甚至在條件惡劣如開關頻率較低、輸出電流較小的同時,母線電壓較大的情況下,電機電樞電流斷續,電機無法正常運行。
為繼續使用傳統B6拓撲來驅動無鐵心電機,且保證電樞電流處于電流連續模式,這里分析在使用上下管同一斬波驅動信號,即H_PWM-L_PWM控制方式時,一個開關周期內的電流變化情況。以a、b相導通為例,其等效電路如圖2所示。電流通路a、b分別代表開關管導通和關斷時期的等效電路。在一個開關周期內,電壓方程為


圖2 H_PWM-L_PWM控制B6拓撲等效電路
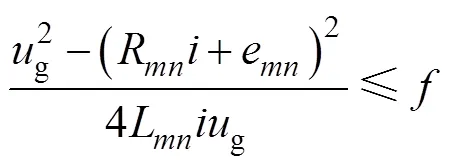
根據式(2)可知,不等式左側對反電動勢的導數小于零,則其最大值在反電動勢為零,即轉速為零時取到。式(2)在反電動勢極值點可化簡為


圖3 不同母線電壓和輸出電流下,保證電流連續的最小開關頻率
電流連續條件曲面僅僅保證了電機正常運行,當電機運行點取在曲面上而不留有較大裕量時,斬波引起的電流紋波極大,在電流臨界連續時電流紋波等于2倍的輸出電流,進一步導致電機性能的惡化。
1.2.2 H_PWM-L_ON控制B6拓撲及雙級式驅動拓撲
在方波控制中,還有H_PWM-L_ON、H_ON-L_ PWM、PWM-ON、ON-PWM、PWM-ON-PWM等諸多控制方式,后幾種控制方式與H_PWM-L_PWM的不同之處在于開關管關斷時,沒有母線電壓反壓加在電樞兩端。H_PWM-L_ON控制方式也稱為全橋的Buck斬波方式,這里分析使用H_PWM-L_ON控制方式時,在一個開關周期內的電流變化情況。與1.2.1節分析方式一致,電感電流連續條件為

1.3 不同拓撲提升時間常數的辦法
1.3.1 H_PWM-L_PWM控制B6拓撲串聯電感
根據式(2)可反推B6拓撲在H_PWM-L_PWM控制方式下,維持電樞回路處于CCM,所需的總的回路電感滿足
1.3.2 H_PWM-L_ON控制B6拓撲串聯電感與前級Buck變換器電感
同理,根據式(4)可反推得H_PWM-L_ON控制方式下,維持電樞回路處于CCM,所需的總的回路電感滿足
B6的H_PWM-L_ON控制也稱作Buck斬波方式,其在一個開關周期內等效電路與Buck變換器一致,因此H_PWM-L_ON控制方式計算得到的串聯電感值與雙級B6拓撲前級Buck變換器的輸出電感值是一致的。

(a)H_PWM-L_PWM控制B6拓撲

(b)H_PWM-L_ON控制B6拓撲
圖4 不同反電動勢和輸出電流下,保證CCM的最小回路電感值
Fig.4 Minimum inductance value to maintain CCM under different circumstances of line electromotive force and output current
2 數學模型
2.1 傳遞函數




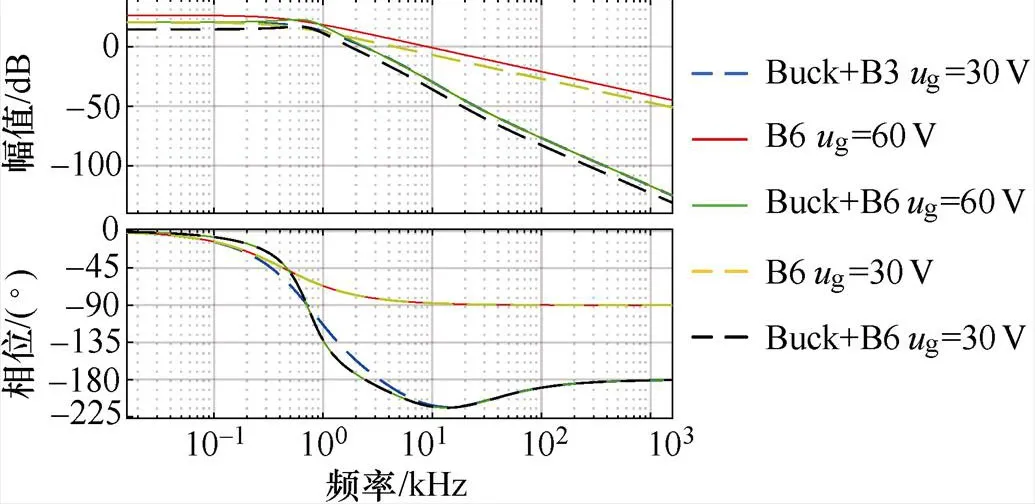
圖5 不同驅動拓撲開環傳遞函數伯德圖
驅動拓撲都具有類似低通濾波器的性質,但從伯德圖上看,單級B6拓撲的截止頻率要高于雙級式拓撲,且相位裕度要比后者更大。若采用PI控制等同屬于低通性質的控制方式,閉環傳遞函數的截止頻率將進一步降低。在實驗中發現,若只為追求雙級拓撲的動態性能,根據系統模型配置最優的控制參數,隨著轉速等狀態發生改變,系統很容易不穩定。因此,在實際應用中,對雙級式驅動拓撲設計PI控制參數時,為保證系統的穩定性,系統截止頻率應設計的比較低。此時系統也無法對瞬時電流進行跟蹤,只能實現對平均電流的控制。
2.2 電流及脈動分析
不考慮前級電路,假設每一拍內逆變器的輸入電壓保持o穩定不變,電機相反電動勢為標準的正弦波基波。根據每一拍內電樞等效電路的電壓方程及電流初始條件,可得導通區電流的時域方程為


根據式(11)可知,無論是雙級式驅動拓撲輸出電流波形,還是單級B6驅動輸出的電流波形包絡線,在每一拍內為馬鞍形波形,具體形狀與電機電樞的時間常數有關。單級B6拓撲的電流波形在此基礎上疊加斬波的脈動,且斬波脈動會隨著轉速的上升而減小。
B6拓撲由于續流通路的存在,工作區間分為導通區和換相區。無論是單級還是雙級拓撲,B6換相區持續時間與電流脈動和斬波、控制性能、換相角誤差等多因素有關,因此這里不做詳細理論分析。
3 實驗
本文使用由TI生產的MCU TMS320F28335和ALTERA生產的CPLD EPM1270F256組成的數字控制板來對電機進行控制,采樣控制頻率設定為20 kHz。對三種驅動拓撲設計環路響應性能相近的PI參數,以平均電流控制方式對無鐵心電機進行控制。本文不考慮換相角誤差導致非理想二極管續流引起的脈動,且在拓撲對比時使用同一臺電機和同一套采樣檢測軟、硬件。圖6為5NMS飛輪驅動系統實驗平臺。驅動硬件采用模塊化設計,不同種驅動拓撲可保留相同模塊,僅對不同硬件電路替換即可。5NMS飛輪驅動系統的具體參數見表1。
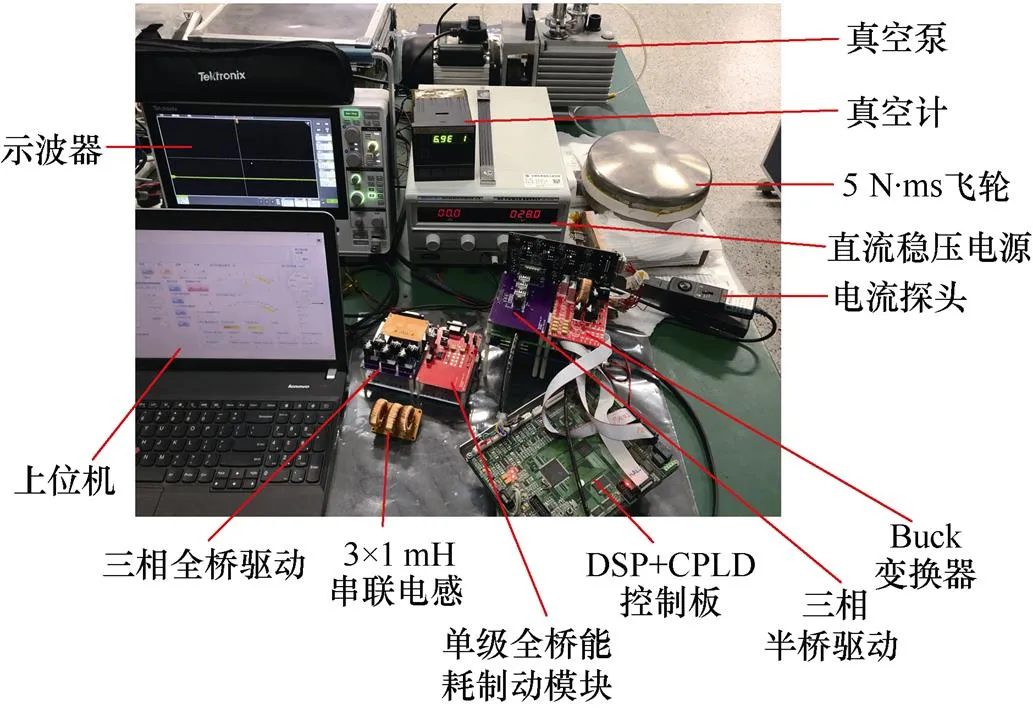
圖6 5NMS飛輪驅動系統實驗平臺

表1 5NMS飛輪驅動系統參數
3.1 導通區電流
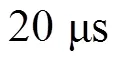
圖7為三種驅動拓撲在4 000 r/min時,以400 ns的采樣周期獲取10 000個采樣點的三相電流波形。為保證B3拓撲與全橋拓撲輸出力矩大小一致,Buck+B3拓撲輸出平均電流控制為1.7 A,后兩種拓撲輸出平均電流控制為1 A。
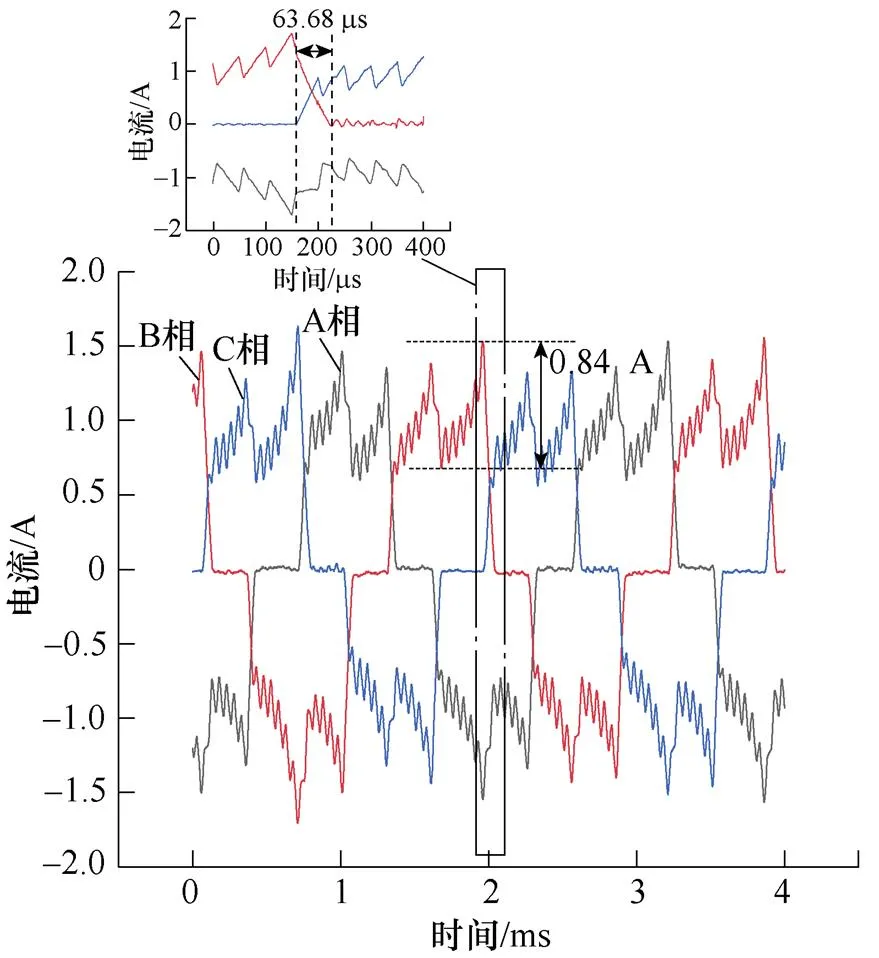
三種拓撲導通區電流脈動和電流紋波率在不同轉速下的變化如圖8所示,前者用柱狀圖表示,后者用折線圖表示。導通區電流脈動及電流紋波率隨轉速上升而不斷增加,但Buck+B3拓撲的電流脈動上升幅度最大,而Buck+B6拓撲的電流脈動最小。

(a)Buck+B3拓撲
(b)B6級聯電感拓撲
(c)Buck+B6拓撲
圖7 不同驅動拓撲在4 000 r/min的電流波形
Fig.7 Current waveforms of different drive topologies when operating at 4 000 r/min
圖8 不同驅動拓撲在不同轉速下的導通區電流脈動
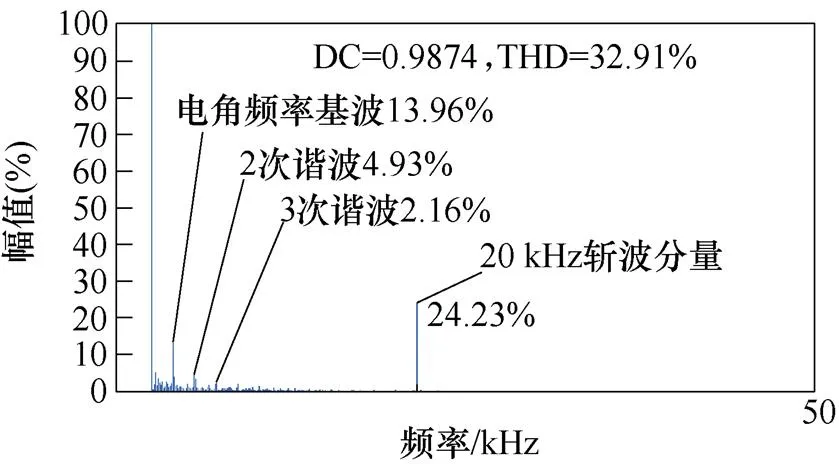
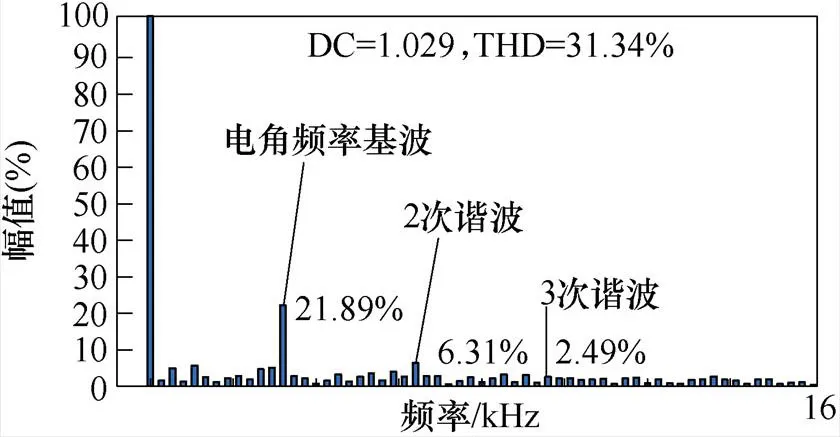
針對三種驅動拓撲,在不同轉速下的電流進行傅里葉分析。圖9給出了不同拓撲在2 000 r/min和4 000 r/min工作點,以0 Hz為基頻率對電流進行分析,并將直流量認為100%,得出的諧波含量。從圖9中可以看出,諧波主要集中在轉子電角頻率的基波頻率和高次倍頻。Buck+B3拓撲驅動拓撲輸出電流諧波隨轉速上升幅度較大,總諧波畸變率(Total Harmonic Distortion, THD)在2 000 r/min為16.30%,到了4 000 r/min增加至51.17%,而單級B6拓撲或Buck+B6拓撲電流諧波隨轉速增加較少,由于其斬波分量隨轉速降低,從2 000 r/min到4 000 r/min,其THD甚至略有下降,從32.91%降低至31.71%,其高次諧波甚至可以忽略不計,但應當注意的是,單級B6拓撲除了轉子電角頻率諧波外,還存在大量開關頻率基頻及其倍頻的諧波,其在4 000 r/min時開關頻率處的諧波分量占14.79%。
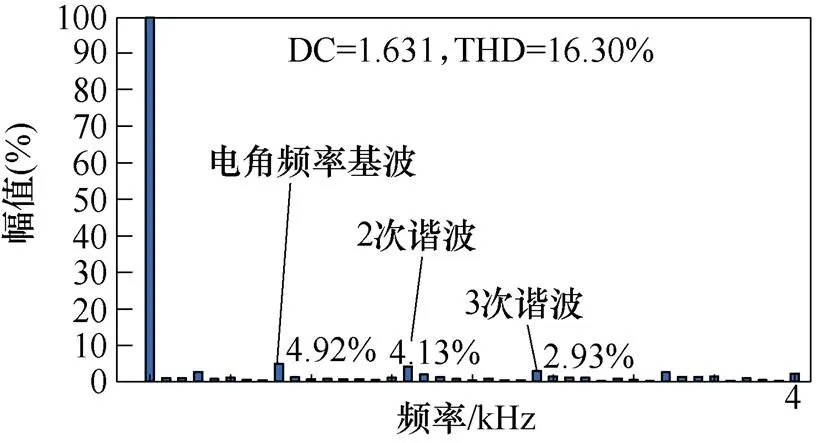
(a)Buck+B3拓撲工作在2 000 r/min
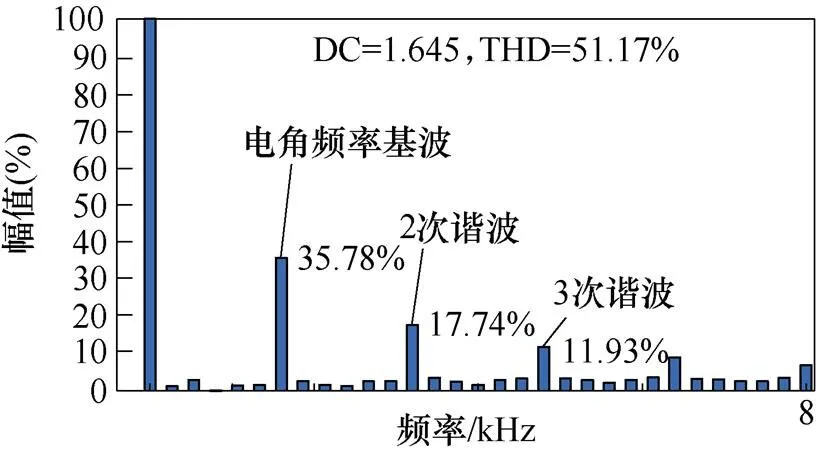
(b)Buck+B3拓撲工作在4 000 r/min
(c)B6級聯電感拓撲工作在2 000 r/min

(d)B6級聯電感拓撲工作在4 000 r/min
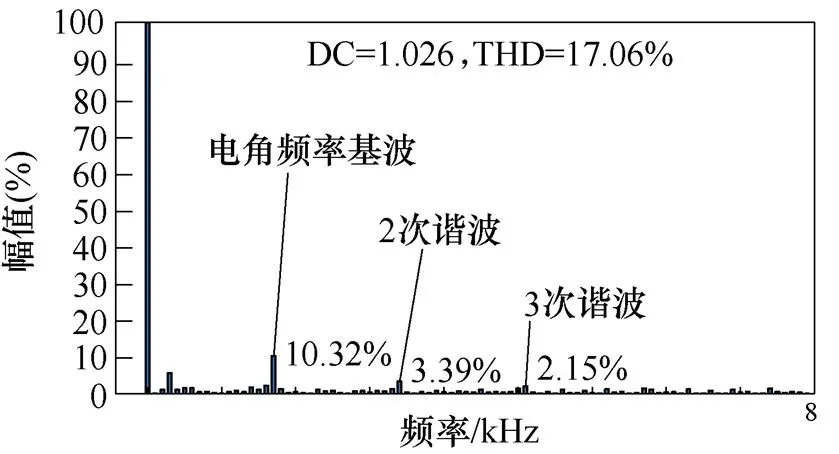
(e)Buck+B6拓撲工作在2 000 r/min
(f)Buck+B6拓撲工作在4 000 r/min
圖9 三種拓撲在2 000 r/min和4 000 r/min時電流傅里葉分析結果
Fig.9 Current Fourier analysis results at 2 000 r/min and 4 000 r/min for three drive topologies
3.2 換相恢復時間
B6拓撲存在續流通路,與B3拓撲相比多了換相區。這里比較兩種B6拓撲的換相區與B3拓撲換相后電流恢復時間。
由于雙級式驅動拓撲提升電路時間常數的思路是在前級預穩壓電路中增加電感,而單級B6拓撲將電感串聯在每一相電樞回路中,將小電感電機等效為大電感電機。因此,單級B6串聯電感的拓撲換相時間要遠遠高于Buck+B6驅動拓撲。一臺8對極的電機使用B6驅動拓撲工作在六拍式方式,在6 000 r/min時,其一拍的電頻率為4.8 kHz,以圖10中實驗數據為例,其換相區對一拍工作區間總時間的占比為54.72%。換相區關斷相通過反并聯二極管續流的狀態是不可控的。這說明單級B6串聯電感的方式雖能保證電機的運行,但換相區的延長卻會極大惡化電機高速運行的性能。時間常數過大的電機不適合高速運行。
雙級式驅動拓撲換相后的穩定時間隨轉速增加而降低。Buck+B6拓撲驅動下的電機換相時間在全速度范圍內只有幾個ms,若想在此拓撲基礎上,進一步使用重疊換相控制等算法對換相區脈動進行控制,開關頻率則至少要達到幾百kHz以上。

圖10 不同驅動拓撲在不同轉速下的換相時間
3.3 效率
由于單級B6拓撲無法從電機電能輸入端測量功率,本文比較兩種雙級式驅動拓撲的效率。從1 000 r/min到6 000 r/min,Buck+B3拓撲與Buck+ B6拓撲在母線分別為30 V和60 V,并分別輸出1.7 A和1 A平均電流的條件下,輸出效率如圖11所示。隨著轉速上升,Buck輸出電壓的增加,其效率也越來越高。但B6拓撲在導通區上下橋臂共兩個開關管的損耗必然大于B3拓撲在導通區僅有一個開關管的損耗。三種驅動拓撲對比總結見表2。
4 結論
本文針對定子無鐵心永磁無刷直流電機電樞電感較小導致電流脈動較大,無法使用傳統三相全橋直接驅動的問題,根據不同提升時間常數的思路設計并制造了三種驅動拓撲,并使用平均電流控制方法驅動同一臺電機,實驗結果表明,三種拓撲均能保證無鐵心小電感電機在最惡劣情況時的電流連續。但在實際應用中,三種驅動拓撲各有優缺點,結論如下:

圖11 雙級式拓撲在后級分別為B3和B6時,在不同轉速下的效率
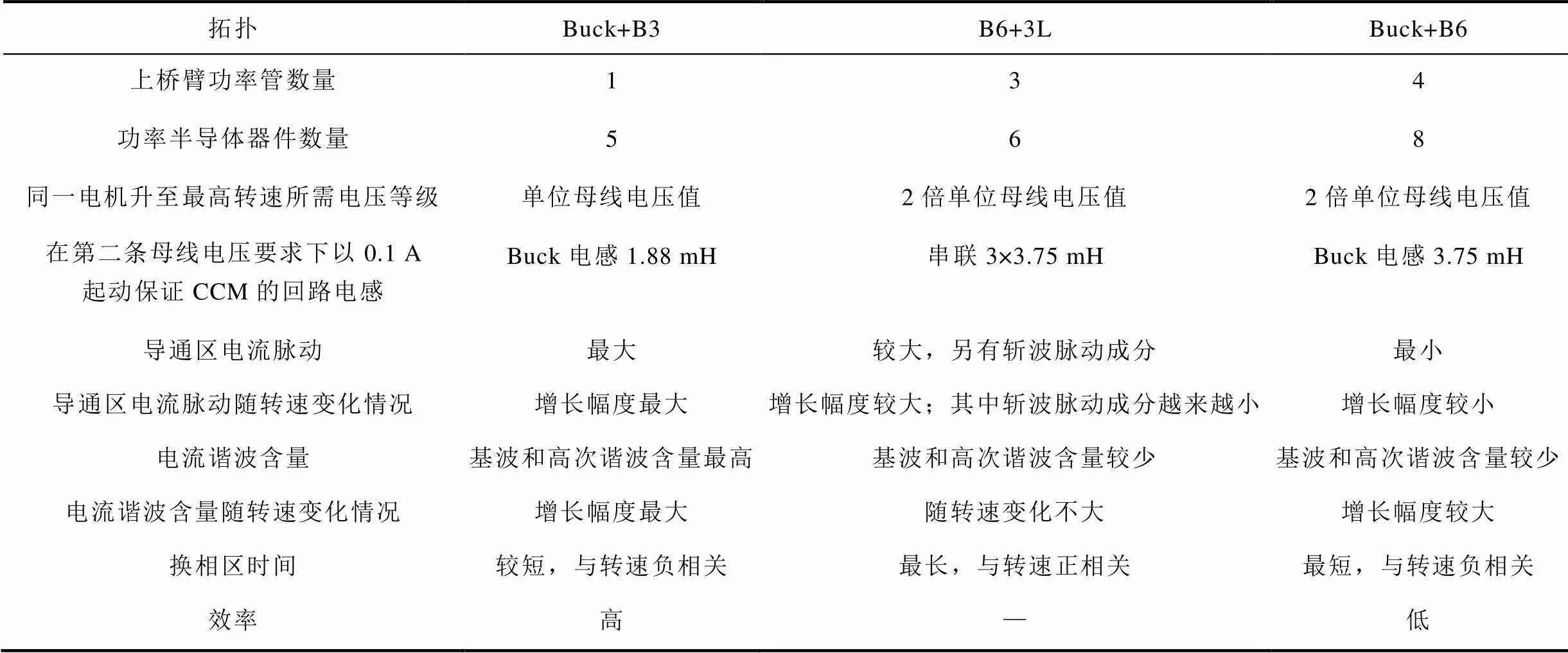
表2 三種驅動拓撲對比總結
1)Buck+半橋拓撲所需的功率開關管數量最少、驅動難度最小。體積、質量和成本最少。對于同一臺電機,升至同一最高轉速所需母線電壓等級是全橋拓撲的一半。以相同最小電流起動所需的Buck變換器的電感值更小。同時,半橋拓撲單相導通開關管損耗相對更低。但是電流性能較差,無續流通路導致開關管硬關斷,母線有較大的電壓尖峰,EMC性能較差。電流脈動和諧波會隨轉速的上升而大幅度地升高。
2)單級半橋串聯三電感拓撲的電流諧波成分隨轉速上升變化不大。等效成大電感電機使其能夠使用矢量控制的控制算法。但是將電感增加在電樞回路內的思路使得電機換相時間增加,導致高速可控性能變差。此外,電流脈動成分最多,低速時斬波引起的脈動和諧波成分很高。
3)Buck+全橋拓撲電流脈動及電流諧波最小,換相時間和脈動較少。且導通區和換相區的性能可以進一步優化。但其硬件成本和體積更大,效率較低。
4)普通的單級全橋驅動不能保證無鐵心小電感電機在母線輸入電壓受限情況下,四象限正常可靠運行。Buck+全橋拓撲可以獲得最好的電流及轉矩性能,在此基礎上可通過拓撲及控制算法方面的研究來進一步提升性能,但是在實際工程應用中,由于母線輸入電壓、體積、質量、成本的限制,可考慮Buck+半橋拓撲來實現無鐵心小電感電機四象限正常運行。全橋串聯電感拓撲方案僅適合使用在電機中低速區間。
[1] Li Haoyan, Xu Haiping, Chen Xi, et al. Comparison of two drive topologies for ironless-stator permanent magnet motor driven by square wave[M]. Singapore: Springer Singapore, 2022.
[2] 李珍國, 王鵬磊, 孫啟航, 等. 基于逐相旋轉坐標變換的無刷直流電機轉子磁場定向瞬時轉矩控制技術[J]. 電工技術學報, 2022, 37(22): 5788-5798.
Li Zhenguo, Wang Penglei, Sun Qihang, et al. Instantaneous torque control technology of rotor magnetic field orientation of brushless DC motor based on phase-by-phase rotation coordinate trans- formation[J]. Transactions of China Electrotechnical Society, 2022, 37(22): 5788-5798.
[3] 張慶湖, 賈喆武, 王東. 環形繞組無刷直流電機的混合換向方法[J]. 電工技術學報, 2022, 37(17): 4346-4354.
Zhang Qinghu, Jia Zhewu, Wang Dong. Hybrid commutation method of brushless DC motor with ring winding[J]. Transactions of China Electrotechnical Society, 2022, 37(17): 4346-4354.
[4] 武潔, 王文磊, 張恒毅, 等. 一種帶抽頭線圈的無刷直流電機無線驅動與控制方法[J]. 電工技術學報, 2022, 37(23): 6116-6125.
Wu Jie, Wang Wenlei, Zhang Hengyi, et al. Wireless driving and control method of brushless DC motor with tapped coil[J]. Transactions of China Electro- technical Society, 2022, 37(23): 6116-6125.
[5] 邊春元, 邢海洋, 李曉霞, 等. 基于速度變化率的無位置傳感器無刷直流電機風力發電系統換相誤差補償策略[J]. 電工技術學報, 2021, 36(11): 2374- 2382.
Bian Chunyuan, Xing Haiyang, Li Xiaoxia, et al. Compensation strategy for commutation error of sensorless brushless DC motor wind power generation system based on speed change rate[J]. Transactions of China Electrotechnical Society, 2021, 36(11): 2374- 2382.
[6] 李珍國, 孫啟航, 王鵬磊, 等. 基于轉子永磁體磁場定向的無刷直流電機轉矩脈動抑制[J]. 電工技術學報, 2020, 35(14): 2987-2996.
Li Zhenguo, Sun Qihang, Wang Penglei, et al. Torque ripple suppression of brushless DC motor based on rotor permanent magnet magnetic field orientation[J]. Transactions of China Electrotechnical Society, 2020, 35(14): 2987-2996.
[7] 張卓然, 耿偉偉, 陸嘉偉. 定子無鐵心永磁電機技術研究現狀與發展[J]. 中國電機工程學報, 2018, 38(2): 582-600, 689.
Zhang Zhuoran, Geng Weiwei, Lu Jiawei. Overview of permanent magnet machines with ironless stator[J]. Proceedings of the CSEE, 2018, 38(2): 582-600, 689.
[8] Ooshima M, Kitazawa S, Chiba A, et al. Design and analyses of a coreless-stator type bearingless motor/ generator for clean energy generation and storage systems[C]//2006 IEEE International Magnetics Conference (INTERMAG), San Diego, CA, USA, 2007: 969.
[9] Liu Xiangdong, Hu Hengzai, Zhao Jing, et al. Analytical solution of the magnetic field and EMF calculation in ironless BLDC motor[J]. IEEE Transa- ctions on Magnetics, 2016, 52(2): 1-10.
[10] Fang Jiancheng, Zhou Xinxiu, Liu Gang. Instan- taneous torque control of small inductance brushless DC motor[J]. IEEE Transactions on Power Elec- tronics, 2012, 27(12): 4952-4964.
[11] De S, Rajne M, Poosapati S, et al. Low-inductance axial flux BLDC motor drive for more electric aircraft[J]. IET Power Electronics, 2012, 5(1): 124.
[12] Fang Jiancheng, Zhou Xinxiu, Liu Gang. Precise accelerated torque control for small inductance brushless DC motor[J]. IEEE Transactions on Power Electronics, 2013, 28(3): 1400-1412.
[13] Valle R L, Almeida P M, Ferreira A A, et al. Unipolar PWM predictive current-mode control of a variable- speed low inductance BLDC motor drive[J]. IET Electric Power Applications, 2017, 11(5): 688-696.
[14] Liu Yue, Hu Jianhui, Dong Shili. A torque ripple reduction method of small inductance brushless DC motor based on three-level DC converter[C]//2019 14th IEEE Conference on Industrial Electronics and Applications (ICIEA), Xi'an, China, 2019: 1669-1674.
[15] Sozer Y, Torrey D A, Reva S. New inverter output filter topology for PWM motor drives[C]//Fifteenth Annual IEEE Applied Power Electronics Conference and Exposition, New Orleans, LA, USA, 2002: 911- 917.
[16] Dzhankhotov V, Pyrh?nen J. Passive LC filter design considerations for motor applications[J]. IEEE Transactions on Industrial Electronics, 2013, 60(10): 4253-4259.
[17] Samitha Ransara H K, Madawala U K, Liu Tianhua. Buck converter based model for a brushless DC motor drive without a DC link capacitor[J]. IET Power Electronics, 2015, 8(4): 628-635.
[18] Li Haitao, Zheng Shiqiang, Ren Hongliang. Self- correction of commutation point for high-speed sensorless BLDC motor with low inductance and nonideal back EMF[J]. IEEE Transactions on Power Electronics, 2017, 32(1): 642-651.
[19] 周闖, 秦國輝, 王玉鵬, 等. 基于Buck變換器的無刷直流電機無位置傳感器控制[J]. 電工技術學報, 2017, 32(12): 197-204.
Zhou Chuang, Qin Guohui, Wang Yupeng, et al. Sensorless control of brushless DC motor based on Buck converter[J]. Transactions of China Electro- technical Society, 2017, 32(12): 197-204.
[20] Wang Wei, Wang Jingwen. Dynamic response enhan- cement and fault protection of Boost converter-fed brushless DC motor in aerospace applications[J]. Applied Sciences, 2019, 9(10): 2113.
[21] Shi Tingna, Guo Yuntao, Song Peng, et al. A new approach of minimizing commutation torque ripple for brushless DC motor based on DC-DC converter[J]. IEEE Transactions on Industrial Electronics, 2010, 57(10): 3483-3490.
[22] 朱俊杰, 劉浩然, 蔣峰, 等. 無刷直流電機轉矩脈動抑制系統的新型拓撲研究[J]. 電工技術學報, 2018, 33(17): 4060-4068.
Zhu Junjie, Liu Haoran, Jiang Feng, et al. A new topology research on torque ripple suppression system of brushless motor[J]. Transactions of China Elec- trotechnical Society, 2018, 33(17): 4060-4068.
[23] 王曉光, 王曉遠, 傅濤. 基于電流型斬波控制器的盤式無鐵心永磁同步電機控制方法[J]. 中國電機工程學報, 2015, 35(9): 2310-2317.
Wang Xiaoguang, Wang Xiaoyuan, Fu Tao. The control strategy of disc coreless permanent magnet synchronous motor based on the current chopper control[J]. Proceedings of the CSEE, 2015, 35(9): 2310-2317.
[24] 王曉遠, 王曉光, 傅濤. 基于電流矢量的盤式無鐵心永磁同步電機瞬時轉矩控制[J]. 電工技術學報, 2016, 31(16): 43-49.
Wang Xiaoyuan, Wang Xiaoguang, Fu Tao. Instan- taneous torque control for disc coreless permanent magnetic synchronous motor drives based on the current vector[J]. Transactions of China Electro- technical Society, 2016, 31(16): 43-49.
[25] Carlson R, Lajoie-Mazenc M, Fagundes J C D S. Analysis of torque ripple due to phase commutation in brushless DC machines[J]. IEEE Transactions on Industry Applications, 1992, 28(3): 632-638.
[26] Jiang Guokai, Xia Changliang, Chen Wei, et al. Commutation torque ripple suppression strategy for brushless DC motors with a novel noninductive Boost front end[J]. IEEE Transactions on Power Electronics, 2018, 33(5): 4274-4284.
[27] Li Xinmin, Jiang Guokai, Chen Wei, et al. Com- mutation torque ripple suppression strategy of brushless DC motor considering back electromotive force variation[J]. Energies, 2019, 12(10): 1932.
[28] 姚緒梁, 趙繼成, 王景芳, 等. 一種基于輔助升壓前端的無刷直流電機換相轉矩脈動抑制方法研究[J]. 中國電機工程學報, 2020, 40(9): 3021-3031.
Yao Xuliang, Zhao Jicheng, Wang Jingfang, et al. Research on suppressing commutation torque ripple of brushless DC motor based on an auxiliary step-up front end[J]. Proceedings of the CSEE, 2020, 40(9): 3021-3031.
[29] 曹彥飛, 陸海天, 李新旻, 等. 基于無電感升壓拓撲的無刷直流電機電流控制策略[J]. 電工技術學報, 2021, 36(6): 1249-1258.
Cao Yanfei, Lu Haitian, Li Xinmin, et al. Current control strategy of brushless DC motor based on non-inductive Boost topology[J]. Transactions of China Electrotechnical Society, 2021, 36(6): 1249- 1258.
[30] 李珍國, 孫啟航, 王鵬磊, 等. 無刷直流電機無直軸電樞反應的非正弦轉子磁場定向矢量控制技術[J]. 電工技術學報, 2022, 37(16): 4094-4103.
Li Zhenguo, Sun Qihang, Wang Penglei, et al. Non- sinusoidal rotor field oriented vector control tech- nology without d-axis armature reaction in brushless DC motor[J]. Transactions of China Electrotechnical Society, 2022, 37(16): 4094-4103.
[31] Zhang Shuangshuang, Zhang Wei, Wang Rui, et al. Optimization design of Halbach permanent magnet motor based on multi-objective sensitivity[J]. CES Transactions on Electrical Machines and Systems, 2020, 4(1): 20-26.
Design and Comparison of Drive Topologies for Stator-Ironless Permanent Magnet Brushless DC Motor
1,21,2,31,2,3
(1. Key Laboratory of Power Electronics and Electric Drive Institute of Electrical Engineering Chinese Academy of Sciences Beijing 100190 China 2. University of Chinese Academy of Sciences Beijing 100049 China 3. Qilu Zhongke Electric Advanced Electromagnetic Drive Technology Research Institute Jinan 250100 China)
The ironless permanent magnet brushless DC motor has a very short electrical time constant, and the inductance value of the armature winding is just a few tens of microhenries. When a single-stage, three-phase full-bridge drive topology is used directly to drive an ironless motor in torque control mode, the armature current may be intermittent if the bus input voltage is limited and the average phase current is minimal. The motor may not start correctly in more severe cases. Moreover, the low inductance causes abrupt fluctuations in armature current and torque. The driving characteristics must be examined to improve the motor's performance. Three drive topologies are investigated: Buck cascaded with half-bridge, single-stage full-bridge with inductors in series, and Buck cascaded with full-bridge to ensure normal operation of the ironless motor. Then, the properties of various drive topologies are discussed and contrasted.
Initially, the fundamental distinctions between the three types of drive topologies are discussed. Secondly, while operating an ironless brushless DC motor in current continuous mode, the switching frequency conditions of H_PWM-L_PWM chopping mode for a single-stage full-bridge topology circuit are computed. The calculations show that when the bus voltage rises and the average armature current falls, the needed switching frequency rises to the order of GHz. The switching frequency is half when the H_PWM-L_ON chopping mode is used with all other settings maintained constant. The inductance conditions necessary for the three drives to operate in the current continuous mode can be deduced. The single-stage full-bridge topology requires an additional inductor of at least 3.75 mH per phase if the H_PWM-L_PWM control method is used, or at least 1.88 mH per phase if the H PWM-L ON control method is used when the motor is operated at 0.1 A. The power inductors needed for the Buck converters in dual-stage drives are 1.88 mH and 3.75 mH when the rear stage is a half-bridge and a full-bridge, respectively. Thirdly, the bode diagram is provided together with the transfer functions. Compared with the two-stage design, single-stage topology has a higher cutoff frequency, a bigger phase angle margin, and excellent dynamic performance. Fourthly, the same motor is driven subsequently to evaluate the design and functionality of the three drive topologies based on digital controllers. The experimental results show that all three topologies guarantee the motor's dependable running. The highest current fluctuation and current harmonics content are found in the Buck cascaded with half-bridge topology, exhibiting the quickest rate of change with rotational speed. The current fluctuation is lowest when the Buck is cascaded with a full-bridge topology. While the rate of change with rotational speed is the smallest, the fluctuation brought on by the chopping of the full-bridge cascaded with an extra-inductor is noticeable. The single-stage full-bridge's commutation time is the longest among these three topologies since it uses inductors in series in the armature circuit. At 6 000 r/min in the experiment, the proportion of the commutation region to each operational section is up to 54.72%, indicating that this topology is unsuitable for high-speed operation. Due to the absence of a channel for the energy of the outgoing phase to discharge, the Buck cascaded with half-bridge topology experiences a voltage spike of 54.4 V.
The conclusions are as follows. After the suitable inductor design, all three drive topologies can ensure the normal functioning of the ironless permanent magnet brushless DC motor. Buck cascaded with the three-phase half-bridge topology offers inexpensive cost, simple construction, and control, making it more appropriate for engineering applications of low drive performance. The dynamic response performance of a single-stage full-bridge with inductors in series is superior but unsuitable for high-speed applications.
Ironless-stator, permanent magnet brushless direct current motor (PMBLDC), Buck+ half-bridge, full-bridge with inductances cascaded, Buck+ full-bridge
TM345; TM359.6; TM921.5
10.19595/j.cnki.1000-6753.tces.221742
山東省重點研發計劃(重大科技創新工程)(2021CXGC010208)和齊魯中科電工先進電磁驅動技術研究院科研基金資助項目。
2022-09-14
2022-11-07
李昊巖 男,1994年生,博士研究生,研究方向為電力電子與電力傳動。E-mail: lihaoyan19@mail.iee.ac.cn
許海平 男,1967年生,教授,博士生導師,研究方向為電力電子與電力傳動。E-mail: hpxu@mail.iee.ac.cn(通信作者)
(編輯 崔文靜)