變電金具表面腐蝕膨脹點三維檢測算法
2023-12-27 13:04:02馬斌蔣鵬奇劉星星
計算技術與自動化 2023年4期
馬斌,蔣鵬奇,劉星星
(國網河南省電力公司新鄉縣供電公司,河南 新鄉 453000)
變電金屬表面腐蝕是指該金屬受其周圍復雜介質影響,其表面出現銹蝕膨脹等問題。尤其是變電金屬在環境內受溫濕度、日曬、雨淋等影響下,容易出現腐蝕情況。變電金屬腐蝕后,其表面產生化學作用,使變電金屬呈現氧化狀態[1,2]。受到腐蝕膨脹的變電金屬強度、塑性等力學特征變化明顯,且變電金屬之間的磨損程度和自身形狀均會出現不同程度變化。變電金屬出現腐蝕膨脹后生命周期縮短,容易造成電網故障,嚴重威脅電力企業生產安全,因此需要及時檢測變電金具表面腐蝕膨脹點。
針對上述情況,很多專家學者致力于檢測變電金具表面腐蝕膨脹點,以提升電網安全,例如許晨凱等人[3]和崔靜等人[4]均對金屬表面腐蝕特征檢測進行了研究。前者通過建立三維網格模型和算子矩陣,在計算金具表面腐蝕特征數值和向量后,使用加權公式獲取金具表面腐蝕特征顯著度,從而實現金具表面腐蝕特征識別。但該方法并未考慮金具表面腐蝕三維數據噪聲影響,導致其最終結果不夠理想。后者則通過建立金具表面腐蝕模型,利用該模型模擬金屬腐蝕層生長變化情況,并使用反應速率和擴散系數獲取金具表面腐蝕特征,實現金屬表面腐蝕檢測,但該方法受金具表面腐蝕模型收斂性影響,易陷入極值情況,應用效果不理想。針對金具表面腐蝕檢測中的缺陷,本文設計變電金具表面腐蝕膨脹點三維圖像檢測算法,為電網維護提供更為精準的數據信息。
1 變電金具表面腐蝕膨脹點檢測方法設計
1.1 點云圖像數據預處理
使用三維激光圖像掃描儀獲取變電金具表面腐蝕膨脹點云圖像數據,但是該數據內存在噪聲、殘缺等情況,為使變電金具表面腐蝕膨脹點特征凸顯效果更佳[5],需預處理變電金具表面腐蝕膨脹激光點云圖像數據。本文使用八叉樹算法,對金具表面腐蝕膨脹激光點云數據實施精簡處理。
八叉樹算法的中心思想是在三維空間內以向不同方向分割的形式構建立方體,并將該立方體作為根模型而后繼續分割直至其符合用戶設定數值[6],實現點云數據壓縮。依據八叉樹算法的中心思想,其在劃分點云數據過程中,編碼處理三維空間內的子立方體,其流程如下。
外接立方體被劃分為八等份時,令n表示其剖分層數,以n層八叉樹表示其空間模型,在該空間模型內,所有子立方體均與八叉樹內節點相對應[7,8]。令Q表示八叉樹編碼,其表達式如下:
Q=en-1…em…e1e0
(1)
上述公式中,em表示八進制數,em表示節點和其相鄰節點間的序號,em+1表示節點em與其父節點間的序號,e0~en-1表示八叉樹內子節點和父節點間的序號序列,m∈{0,1,…,n-1}。
獲取到八叉樹編碼后,需編碼處理變電金具表面腐蝕膨脹激光點云數據,步驟如下。
第一步:獲取八叉樹剖分層數n,其符合條件如下:
d0*2n≥dmax
(2)
上述公式中,d0表示設置的精簡點距,dmax表示點云數據外接立方體最大邊長。
第二步:獲取子立方體涵蓋的點云數據編碼。
令P(x,y,z)表示點云圖像數據點,該點云圖像數據點在該子立方體的空間索引數值為(j1,j2,j3),則點云圖像數據點空間索引、數據點和八叉樹編碼Q之間關系表達式如下:
(3)
上述公式中,(xmin,ymin,zmin)為和父節點相對應的點云數據外接立方體頂點最小坐標值。
將點云圖像數據點在子立方體的空間索引數值(j1,j2,j3)變換為二進制形式后[9],子立方體對應的八叉樹編碼空間索引值表達式如下:
(4)
上述公式中,(em%2)、[em/2]分別表示em除2后的余數和結果整數。尋找變電金具表面腐蝕膨脹激光點云圖像數據的若干近鄰時,在該數據點k鄰近的子立方體內搜索即可,因此使用八叉樹算法對變電金具表面腐蝕膨脹激光點云數據進行劃分后,可實現激光點云圖像數據的壓縮,降低激光點云圖像特征提取的復雜度。
1.2 曲面特征提取
在對變電金具表面腐蝕膨脹激光點云數據實施預處理后,通過計算變電金具表面曲率獲取其特征。詳細步驟如下。
1.2.1 法向量計算
法向量是識別曲面特征的重要指標之一,在由變電金具表面腐蝕膨脹激光點云數據構成的變電金屬曲面內,法向量與切平面的法向量數值相同[10,11],因此使用最小二乘法計算變電金屬的微切面后,再利用方程式形式獲取變電金屬的法向量。
令T(O)表示變電金屬的微切面,O表示點云數據點,變電金屬微切面表達公式如下:
ax+by+cz+d=0
(5)
上述公式中,點云數據點的鄰近點的坐標值分別為x、y、z,英文字母a~d均表示未知參數。
利用最小二乘法計算未知參數數值,設置目標函數如下:
AP=0
(6)
上述公式中,A=[a,b,c,d]。
對公式(6)結果實施單位化處理后,得到點云數據點P的法向量為N'=[a',b',c'],其中a'、b'、c'均表示單位化后的參數。
1.2.2 局部基面參數化處理
在計算法向量后,參數化處理局部基面,在處理過程中,令點云數據點O的鄰近點k由Nb(O)={O1,O2,…,Ok}表示,則點云數據點O的微切平面的局部基面為T(O),計算點云數據點在該局部基面上的投影點,則該投影點和鄰近點k的投影點分別由O'、Nb(O')={O1',O2',…,Ok'}表示。在點云數據點O的微切平面內,利用投影點集合Nb(O'),獲取點云數據點O的投影點位置O'和距該投影點位置最遠的投影點,并將其標記為Oi',將投影點O'與Oi'之間以直線相連,將該直線看作u軸,則垂直于的直線看作v軸,連接所有投影點后,以u軸和v軸作為點積,點積值由gj表示。利用點積值對點云數據點O微切面進行u軸參數化,其表達公式如下:
(7)
上述公式中,gmax、gmin分別表示點積最大數值和最小數值。
通過公式(7)可獲取點積的坐標值參數化結果,使用相同方法獲取v軸參數化結果后,即完成變電金具表面腐蝕膨脹激光點云數據局部參數化。
1.2.3 局部曲面擬合
基于上個小節獲取的變電金具表面腐蝕膨脹激光點云數據局部參數化結果,在投影點O'與Oi'之間直線相連的u軸和v軸基礎上增加垂直方向軸,標記為n軸。使三個坐標軸構成空間坐標系,使用最小二乘法對該點云數據曲面進行擬合,其表達式如下:
Z(u,v)=(u,v,au2+buv+cv2)
(8)
上述公式中的未知參數使用公式(6)計算,基于位置參數計算結果,計算點云數據曲面擬合曲率[12],令k1、k2表示點云數據曲面擬合曲率,其表達公式如下:
(9)
上述公式中,δ表示平均曲率,利用公式(9)結果,可計算變電金具表面腐蝕膨脹激光點云數據的高斯曲率和平均曲率數值。
1.2.4 形狀索引值計算
為更多元化呈現變電金具表面腐蝕膨脹點特征[13],利用高斯曲率和平均曲率數值計算變電金具表面腐蝕膨脹點云數據擬合曲面的形狀索引值,其表達公式如下:
(10)
上述公式中,k表示點云數據曲面擬合主曲率。
通過公式(10)可知,當點云數據曲面起伏水平在某一特定區間內時,利用形狀索引值可充分呈現該點云數據曲面特征。
經過上述步驟,獲取變電金具表面腐蝕膨脹點的三維點云數據的法向量、主曲率、高斯曲率和形狀索引值的局部特征,依據上述特征利用三維霍夫投票算法對變電金具表面腐蝕膨脹點進行檢測。
1.3 基于三維霍夫投票的腐蝕膨脹點檢測
在提取曲面特征后,三維霍夫投票算法作為圖像特征匹配識別算法,可識別模糊和缺失的三維圖像目標,通過建立待檢測目標的具備坐標系,利用描述符搜尋模板內對應點的方式實現目標檢測。描述符在模板內尋找對應點時,以變電金具腐蝕膨脹點的特征點之間歐式距離最短的點作為選擇對象[14],丟棄歐式距離最大的點,通過一一比對點云數據特征點實現變電金具表面腐蝕膨脹點檢測,其流程如下。
(11)
(12)

(13)
通過將變電金具表面腐蝕膨脹點的特征點和矢量結合即可獲取其特征的質心位置,通過對特征質心進行投票,獲取質心坐標以特定增量增長到指定數組內,按照質心位置和數量獲取變電金具表面腐蝕膨脹點位置,實現變電金具表面腐蝕膨脹點三維圖像檢測。
2 實驗分析
以某市局域供電網為實驗對象,使用三維激光圖像掃描儀獲取該市局域供電網變電站金屬設備表面三維點云數據,利用MATLAB仿真軟件模擬變電站金屬設備腐蝕情況,使用本文方法對變電金屬設備表面腐蝕膨脹點進行檢測,從多個角度對本文方法的有效性進行驗證。
2.1 點云數據預處理測試
通過三維激光掃描儀獲取的變電站金屬設備表面三維點云數據內存在噪聲、殘缺等情況,需對其進行預處理,以一組變電金具點云數據為實驗對象,測試本文方法點云數據預處理效果,結果如圖1所示。
分析圖1可知,在初始點云數據內,由于存在噪聲干擾,數據點分布較為分散且點云數據輪廓不夠清晰,還存在點云數據局域集中情況。而經過本文算法預處理后的點云數據分布輪廓清晰,且預處理后的點云數據點數量明顯減少。由此可見本文算法可有效壓縮激光點云數據,也從側面印證本文方法對變電金具表面腐蝕膨脹點的檢測能力好。

(a)初始點云數據
2.2 特征提取測試
特征提取是變電金具表面腐蝕膨脹點檢測的基礎,測試在變電金具表面腐蝕膨脹點點云數據存在遮擋缺失的情況下,本文算法提取其特征的完整度,結果如表1所示。
分析表1可知,本文算法提取的變電金具表面腐蝕膨脹點的主曲率、法向量和形狀索引值特征完整度與其遮擋缺失率成反比例關系。三種膨脹點特征的完整度數值均較高,且數值相差較小,隨著變電金具表面腐蝕膨脹點遮擋缺失率的增加,提取形狀索引值特征的完整度數值下降幅度相對稍大,但在遮擋缺失率為20%時,提取形狀索引值特征的完整度數值依然超過90%。上述結果表明本文算法受變電金具表面腐蝕膨脹點遮擋缺失情況影響較小,提取變電金具表面腐蝕膨脹特征完整度較高。
2.3 腐蝕膨脹點檢測
變電站金屬配件受到腐蝕時會出現輕微膨脹情況,以該電網變電站供電主機的螺絲配件為實驗對象,將腐蝕膨脹點匹配程度作為衡量本文算法腐蝕膨脹點檢測指標,使用本文方法對其腐面的膨脹點進行匹配,結果如圖2所示。
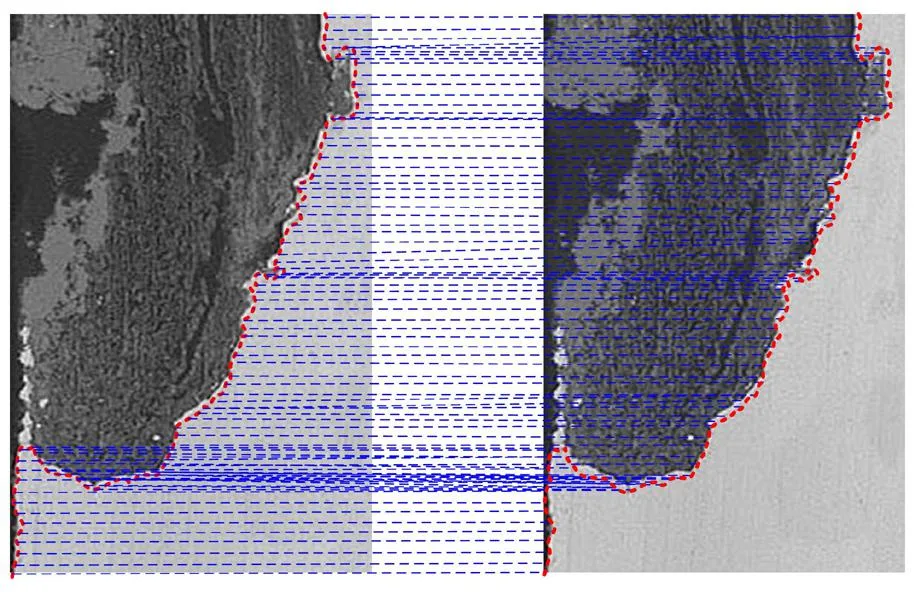
圖2 腐蝕膨脹點匹配結果
分析圖2可知,配電站螺絲配件受到腐蝕時,其具備向外膨脹特征,對向外膨脹點特征進行提取后,使用本文方法對其進行特征點匹配,所有的特征點一一對應,匹配精度高達100%。該結果表明:本文方法對變電金具表面腐蝕膨脹點識別結果極為精準,具備較高的科學含量。
依據上述腐蝕膨脹點匹配結果,獲取本文算法識別的配電站螺絲配件腐蝕膨脹點,結果如圖3所示。
分析圖3可知,螺絲配件腐蝕面經過腐蝕膨脹點匹配后,可獲取該螺絲配件的腐蝕膨脹點,如圖3內紅色圓圈內所示。由此可見本文算法可有效識別螺絲配件腐蝕膨脹點,為電網安全運行提供可靠依據。
為更全面呈現本文算法腐蝕膨脹點檢測能力,以該市區電網配電站內電流互感器的一次導電U型鋁管為實驗對象,在仿真軟件內模擬其腐蝕膨脹情況,腐蝕面大小占其自身比例為1%~7%,測試本文算法在不同大小腐蝕面情況下的一次導電U型鋁管腐蝕膨脹點數量,并與模擬膨脹點數量進行對比,結果如圖4所示。
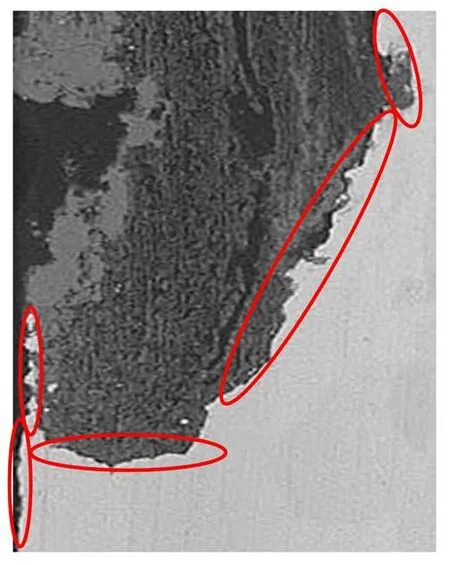
圖3 螺絲配件腐蝕膨脹點檢測結果
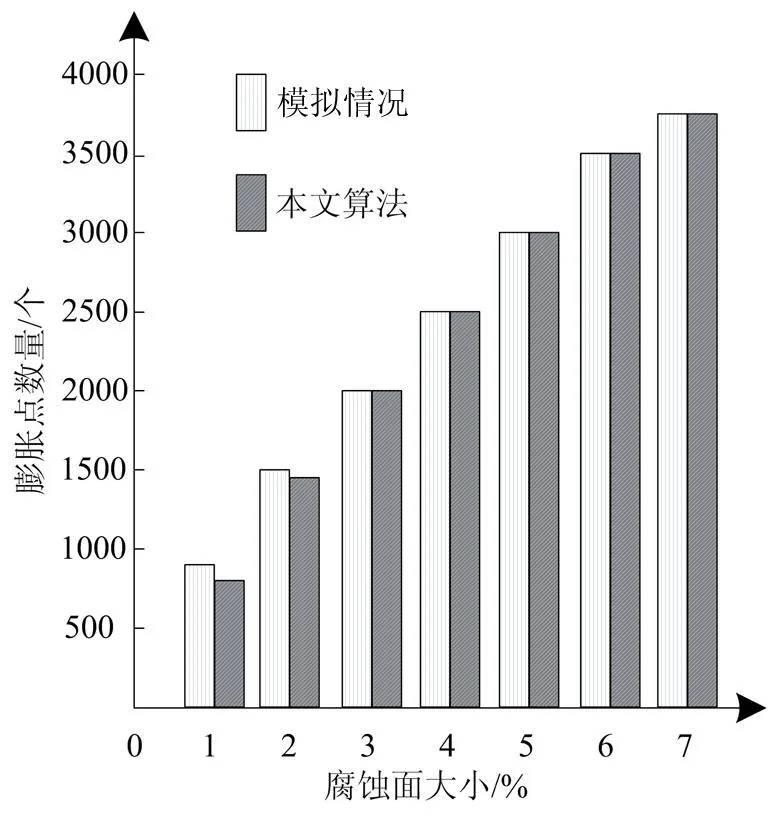
圖4 腐蝕膨脹點檢測結果
分析圖4可知,一次導電U型鋁管腐蝕百分比數值越大,則其膨脹點數量越多。在腐蝕面占其自身比例分別為1%和2%時,本文算法識別的一次導電U型鋁管腐蝕膨脹點數量與模擬膨脹點數量存在一定偏差,其中最大偏差數值約為100。但隨著一次導電U型鋁管腐蝕百分比數值增加,本文算法檢測到的膨脹點數量與模擬膨脹點數量完全相同。由此可見本文算法對腐蝕面較大的變電金具表面腐蝕膨脹點檢測具備較大優勢,而在檢測腐蝕面較小的變電金具腐蝕面時,偏差數值較小。綜上所述,本文算法檢測變電金具表面腐蝕膨脹點時,受其腐蝕面積影響較小,且針對腐蝕面較小的變電金具,檢測結果偏差數值較小。
3 結 論
本文研究了變電金具表面腐蝕膨脹點三維圖像檢測算法,將八叉樹算法引入檢測方法中,使用八叉樹算法壓縮處理變電金具表面腐蝕膨脹點點云數據,經過壓縮處理后的點云數據受噪聲干擾較小,可有效提升變電金具表面腐蝕膨脹點檢測結果精度。將本文算法應用于某市局域供電網內,經過多角度驗證,該算法具備較好的點云數據預處理能力,且識別變電金具表面腐蝕膨脹點精度較高。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54