基于線控四輪轉向系統的車輛橫向控制策略
2023-12-28 02:12:04馬瑞蘭郭唯浩姚俊明郭世永
青島理工大學學報 2023年6期
馬瑞蘭,郭唯浩,姚俊明,郭世永,*
(1.青島理工大學 機械與汽車工程學院,青島 266525;2.歌爾科技有限公司,青島 266100)
伴隨著汽車技術的進步及汽車保有量的增加,汽車已經成為首選的出行工具。為滿足消費者對車輛舒適性日益增長的需求,車輛的輪廓變得更長、更高,體型的增加導致汽車的靈活性降低[1],從而增加了駕駛負擔。線控四輪轉向技術作為一種前沿的底盤電控技術,可以兼顧車輛的舒適性和靈活性[2],目前已經被用于多款量產車型。其工作原理具體可以描述為當車輛低速行駛時,后輪轉角與前輪轉角相反,用以減小長軸距車輛在泊車工況下的轉彎半徑,達到降低駕駛員操縱負擔的目的;在車輛高速行駛時,后輪轉角與前輪轉角轉向相同,用于提高車輛的側向穩定性,同時降低駕駛員的心理負擔。但是傳統的前輪轉向系統將轉向傳動比設定為固定值,這很難滿足不同車速下的需求,難以實現理想的橫向運動狀態響應特性。因此,線控四輪轉向應運而生,被用來提高自動駕駛車輛在循跡控制過程中的跟蹤精度和穩定性[3-6]。
為了提高自動駕駛車輛在循跡控制過程中的跟蹤精度和穩定性,首先搭建線控四輪轉向車輛模型[7],再結合Dugoff經驗輪胎模型用來提高模型的精度、避免獲取復雜的輪胎參數,然后分析橫向狀態參考模型得到飽和狀態下的車輛橫擺角速度。考慮到傳感器成本高昂,難以直接測量側向速度,另外車輛側偏力因路面附著系數的變化及輪胎飽和等因素呈現出非線性,再加上路面擾動及模型參數時變特性的影響也會降低橫向運動狀態的跟蹤性能,因此本文采用擴展卡爾曼濾波算法應對非線性的影響,融合改進積分法用以提高觀測器的魯棒性和觀測精度,提出一種自適應滑模控制策略,采用橫擺角速度誤差和質心側偏角誤差定義滑模面,將前后軸側偏剛度作為自適應參數,通過李雅普諾夫函數證明所提控制策略的穩定性,最終,設計考慮駕駛員反應時間和上臂肌肉力的駕駛員模型,在Carsim/Simulink聯合仿真環境中搭建線控四輪轉向控制策略。
1 模型建立
1.1 線控四輪轉向車輛模型
如圖1所示,線控四輪轉向車輛模型的輸入為前輪轉角和后輪轉角,模型狀態為質心側偏角和橫擺角速度。車輛的側向速度差分方程和橫擺運動差分方程根據牛頓第二定律總結為[6]
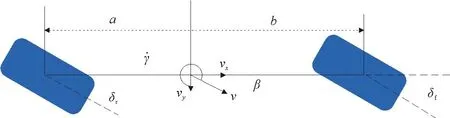
圖1 線控四輪轉向車輛模型
(1)
1.2 Dugoff輪胎模型
輪胎形狀以及輪胎的縱向載荷決定輪胎在橫向運動過程中的性能,Dugoff輪胎模型將用于描述輪胎側向的動力學關系,其優勢在于將輪胎模型綜合到側偏剛度中,提高模型保真度的同時避免復雜的參數調諧。圖2描述了車輛前后軸側偏力與側偏角的關系。
具體可以解釋為在非劇烈的駕駛運動中,輪胎為轉向運動提供的側向力較小,輪胎側向力與輪胎側偏角近似為線性關系;當輪胎進入飽和區,隨著側偏角的增加,側向力不再上升。
前后軸的側偏角變化如式(2)所示:

式中:αf,αr分別為前后軸側偏角;δf,δr分別為前后軸輸入轉角;vx,vy分別為車輛質心處的縱向和橫向車速。
Dugoff輪胎模型可以被描述為
Fy=-Cαf(λ)tanα
(3)

1.3 橫向運動狀態參考模型
理想的橫向運動狀態響應特性隨車速變化,并且呈現不足轉向的趨勢,在固定車速下橫擺角速度增益不隨方向盤轉角以及路面發生變化。理想的參考橫擺角速度的穩態響應由二自由度模型推導[8]:
(4)
當車輛的轉向運動過于劇烈,輪胎進入飽和,參考橫擺角速度將被修改為
(5)
式中:g為重力加速度。
質心側偏角的理想值為0:
βref=0
(6)
2 質心側偏角觀測器設計
現有的低成本車傳感器很難準確地觀測到質心側偏角,質心側偏角的觀測算法一直是車輛動力學研究過程中的熱點[9]。在觀測器的設計過程中,主要包括兩種策略,第1種是基于車輛動力學模型的觀測器,主要是擴展/無跡卡爾曼濾波、H∞/H2魯棒觀測器、T-S模糊觀測器及基于深度學習理論的觀測器等[10];第2種是基于車輛運動學算法的觀測器,此種觀測器大多使用積分法或改進的算法。依賴車輛動力學算法的觀測器很難獲取復雜的車輛參數,并且車輛模型在輪胎飽和區呈現出高度的非線性,第2種觀測器的缺點是傳感器存在噪聲及偏置,產生的累計誤差難以控制[11]。本文采用擴展卡爾曼濾波算法用來克服車輛動力學的非線性問題,根據側向加速度ay的幅值融合改進積分法的優點,避免大加速度下模型失真對觀測結果的影響,觀測器的構成如圖3所示。
圖3描述了擴展卡爾曼濾波算法及其與改進積分法的融合過程,在改進積分法的計算過程中,為了降低傳感器信號中偏置和噪聲的影響,需要加入阻尼系數對積分項進行修正:
(7)
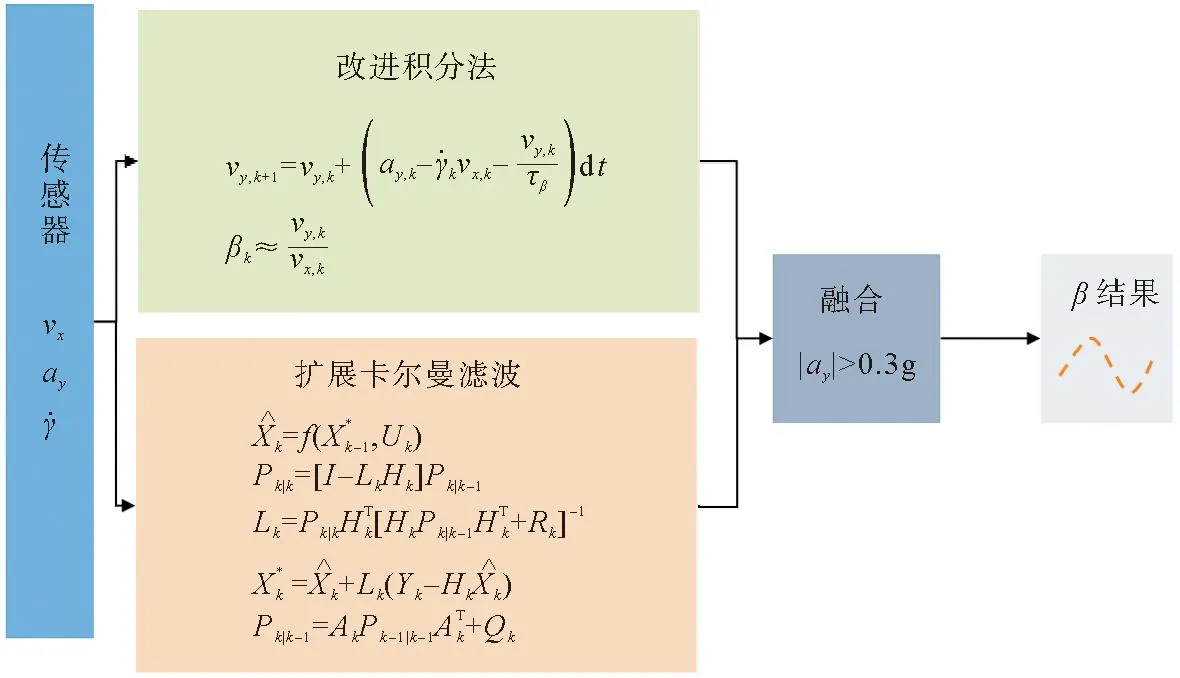
圖3 質心側偏角融合觀測器
用于擴展卡爾曼濾波的車輛動力學模型經過離散化為
(8)
擴展卡爾曼濾波存在2個過程,第1個過程為基于車輛動力學模型在時間上的更新:
1) 預測狀態更新
(9)
2) 預測協方差更新
(10)
第2個過程為基于傳感器測量的更新:
1) 擴展卡爾曼濾波增益更新
(11)
2) 狀態融合過程
(12)
3) 協方差更新
Pk|k=[I-LkHk]Pk|k-1
(13)

3 線控四輪轉向橫向控制器
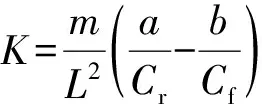
等效的前后軸側偏剛度因輪胎參數不同、轉向過程載荷轉移及輪胎飽和發生變化。在橫向控制器的設計過程中,系統等效為線性二自由度模型,前后軸的側偏剛度作為自適應參數:
(14)
式(14)中,系統的系數矩陣分別為
車輛橫向控制中跟蹤誤差為
(15)

(16)

為了設計自適應律[13],定義側偏剛度偏差為
(17)
(18)
側偏剛度自適應律設計為
(19)
其中,系數矩陣的定義為
4 Carsim/Simulink仿真與驗證
為驗證所提出線控四輪轉向算法的有效性,從神經肌肉力學的角度建立擬人化駕駛員模型。理想的參考模型需要合理的轉角輸入,因此結合Carsim車輛動力學模型,在Simulink搭建駕駛員模型、參考模型、質心側偏角觀測模型及控制器模型。

圖4 駕駛員模型
4.1 駕駛員模型
駕駛員通過注視行為獲得必要的信息過程被稱為預瞄。預瞄模型的建立通常包括3個要素:駕駛員在行駛過程中的預瞄時間、基于預瞄偏差的控制器及考慮駕駛員神經肌肉反應的時間常數。圖4為本文所采用的駕駛員預瞄模型,其中d為駕駛員的預瞄距離,ey為在駕駛過程中的橫向偏差[14]。
駕駛員的預瞄時間在一定的取值范圍,根據需求在本文中被設定為經驗常數T=d/vx。橫向跟蹤偏差被定義為[15-16]
ey=y(t+T)-y(t)-dtanψ
(20)
式中:ψ為航向角;y(t),y(t+T)分別為當前時刻、預瞄時刻的橫向坐標。
根據比例-積分-微分的反饋策略,駕駛員模型輸出的轉角為
(21)
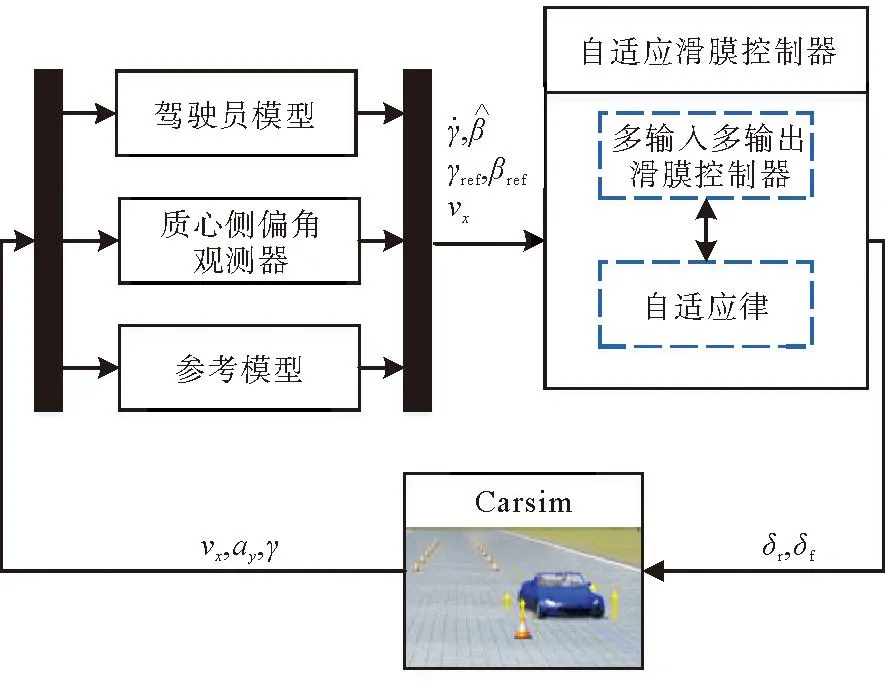
圖5 Carsim/Simulink聯合仿真
式中:Kp,Ki,Kd分別為反饋策略中的比例增益、積分增益及微分增益;t為誤差積分的時間。
按照圖5所示,進行Carsim/Simulink聯合仿真。圖中,輸入量設置為vx,ay,γ:車輛的縱向車速、車輛的橫向加速度、車輛的橫擺角。
在仿真中采用延時傳遞函數和一階慣性傳遞函數模擬駕駛員上臂的神經肌肉的反應特性:
(22)

4.2 聯合仿真試驗結果及分析
在Carsim軟件中設定車輛動力學模型,車輛類型選擇C-Class車輛,具體參數信息如表1所示。設計定速100 km/h的雙移線仿真工況[17],在仿真過程對比地設計了無控制的前輪轉向車輛。

表1 車輛參數

圖6表明,線控四輪轉向的質心側偏角的峰值遠小于無控制的前輪轉向車輛,驗證線控四輪轉向系統可以提高橫向運動的穩定性。控制效果如圖7所示。
圖7(b)及圖7(c)清晰地展示了線控四輪轉向車輛的橫擺角速度實際值與參考值的誤差較小,質心側偏角趨近于理想的參考值0,驗證了自適應滑模控制器可以提高橫向運動狀態的跟蹤性能。同時,質心側偏角實際值和觀測值基本一致,表明本文所提出擴展卡爾曼濾波與改進積分法融合算法具有良好的觀測性能。

圖7 控制效果對比
由圖7(a)可以看出,在線控四輪轉向系統中前軸轉角和后軸轉角的方向相同,從而提高換道過程中車身的穩定性。
5 結論
本文所提出的擴展卡爾曼濾波與改進積分法融合的策略可以良好地觀測出車輛的實時質心側偏角值,Dugoff輪胎模型更準確描述了輪胎側向力和側偏角的關系,擴展卡爾曼濾波解決了對非線性模型最優估計的問題,在增大側向加速度時切換為改進的積分法,避免了輪胎飽和導致模型失真的問題。
本文所提的自適應滑模控制器能夠自適應前后軸剛度的變化,實現對橫擺角速度和質心側偏角的閉環控制并具有良好的控制效果,達到減小車輛橫向運動中的軌跡跟蹤偏差和降低質心側偏角的峰值的目的。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28