自動駕駛融合感知定位精度的驗證測試
2024-01-01 00:00:00張華王釗桐羅偉堅謝永炫魏國華鄭青星
汽車與新動力 2024年5期
摘要:自動駕駛需要精確定位信息來規劃控制策略,定位精度不足會影響自動駕駛車輛的有效運行和安全性。通過全球導航衛星系統(GNSS)定位技術、實時動態(RTK)定位技術及慣性測量單元(IMU)導航技術等測試方案,采用RT 3000 V4衛導-慣導組合定位系統對自動駕駛車輛的融合感知定位精度進行測試。結果表明:在開放環境下,自動駕駛車輛的融合感知定位結果與RT 3000 V4定位結果相比,其誤差在6 cm以內;而在城市道路環境下,兩者定位誤差超過15 cm。雖然運用GNSS技術、RTK技術及IMU技術可以減少城市道路環境中的多路徑和非視距問題,但自動駕駛車輛的融合感知定位與RT 3000 V4的定位誤差在測試過程中多次超過10 cm。經分析,城市道路周圍復雜環境會對測試過程中的衛星質量、網絡RTK移動基站穩定性、移動站數量和數據同步性有所影響,同時會降低RT 3000 V4的測試精度,從而有可能影響自動駕駛融合感知定位的精度。
關鍵詞:自動駕駛;融合感知定位;實時動態(RTK);全球導航衛星系統(GNSS)
0 前言
定位感知是自動駕駛系統的基本要求之一。自動駕駛的融合感知定位技術是實現其高精度和高可靠性的重要手段。該技術通過綜合處理多種傳感器的數據,獲得更全面、準確的環境信息,從而提高車輛的定位精度和可靠性。多傳感器融合定位技術在自動駕駛中扮演至關重要的角色[1]。通過整合全球定位系統(GPS)和其他傳感器(如激光雷達、攝像頭、毫米波雷達等)的信息,克服了單一傳感器的局限性,提升了自動駕駛系統的定位準確性。
全球導航衛星系統(GNSS)在全球定位中發揮著不可替代的作用。在開放環境下,基于載波相位差分的GNSS定位技術,即實時動態(RTK)定位技術,可實現厘米級的定位精度[2-3]。然而,作為一種基于到達時間的定位技術,GNSS-RTK在城市環境中應用時容易受到信號反射和阻塞的影響,導致出現多路徑和非視距問題,進而使定位結果不夠準確,甚至可能出現大于10 m的定位誤差。換而言之,雖然GNSS-RTK定位技術對于提供全球參考定位非常重要,但在城市、峽谷等復雜環境下,其精度并不能得到保證[4]。
為了克服上述這些挑戰,將GNSS與慣性測量單元(IMU)進行融合的課題已被廣泛研究。為了能夠在復雜城市道路場景下實現GNSS與IMU的融合,需要減輕GNSS因解算異常造成的性能下降,校準IMU并在集成過程中及時限制GNSS中斷期間IMU產生的偏差[5]。本文通過GNSSRTK+IMU融合系統的技術測試方案,采用RT 3000 V4衛導-慣導組合定位系統和移動基站網絡差分(NTU)組合模式,增加SENMT 1輪速計,在開放場景和城市道路場景下分別進行自動駕駛汽車融合感知定位精度的測試。
1 測試原理
為了準確測試自動駕駛車輛GPS和激光雷達(LiDAR)融合感知定位精度,本次測試采用RT 3000 V4來測量自動駕駛車輛GPS和多傳感器的融合感知定位精度。
RT 3000 V4主要由GNSS和IMU兩部分組成,通過先進的融合濾波算法,集成和融合GNSS和IMU的輸出,以提供高精度、高可靠度的定位信息和姿態信息。目前,RT 3000 V4支持全球主流的全球導航衛星系統,包括GPS、格洛納斯衛星導航系統(GLONASS)、北斗衛星導航系統(BeiDou)和伽利略衛星導航系統(Galileo)等4種定位系統,極大提升了RT 3000 V4的GNSS接收機的信號接收和快速鎖定的能力,提升了定位的可靠性,從而能夠應對復雜的道路環境。
GNSS接收器包含天線和接收器兩部分,其中天線是接收衛星信號,而接收器則將接收到的信息轉化為如經緯度的測量結果。GNSS定位原理是基于三邊測量原理,通過與至少4顆衛星通信來確定位置。
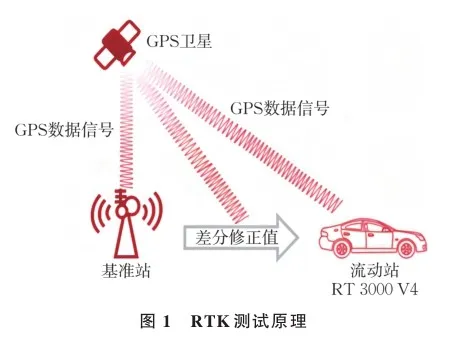
由于大氣電離層干擾,偽距測量的定位精度只能達到分米級,甚至米級。為提升到厘米級的定位精度,需要通過RTK技術來實現[6]。RTK技術是GPS測量技術與數據傳輸技術的組合系統基于載波相位觀測的實時動態差分定位技術,通過基準站和流動站數據的差分處理,實時獲得厘米級定位結果。其測試原理是基準站與車上的RT 3000 V4兩者同時接收同一GPS衛星發射的數據信號,接著基準站將觀測值與其已知位置進行比較得到差分修正值,然后通過數據傳輸系統將修正值實時傳遞給RT 3000 V4,最后經差分修正后RT 3000 V4獲得厘米級的實時位置,如圖1所示。
自動駕駛車輛通過車載GNSS接收機接收信號,比較基準站接收的衛星信號做差分處理得到高精度定位。GNSS+RTK的混合系統易于使用,不會漂移并且準確度高。RT 3000 V4的另一個組成部分是IMU,其由陀螺儀、加速度計等慣性傳感器和導航解算系統集成而成,通過3組陀螺儀和加速度計分別測量3個自由度的角加速度和加速度,再通過積分運算獲得物體在三維空間的運動速度和軌跡。
RT 3000 V4通過與GNNS、RTK及IMU相結合,可以解決單一GNSS在遮擋區域衛星少或信號丟失導致的定位數據精度差的問題,也解決了IMU的漂移問題,可測量俯仰角、滾轉角和偏航角等姿態數據,保證RT 3000 V4的高定位精度。
RT 3000 V4還可組合增加輪速計[7],提高系統的定位精度。輪速計通過測量車輪的轉速來計算車輛的行駛速度和里程,并可提供連續的速度信息,即使在GNSS信號中斷或弱信號區域,也能保證定位數據的連續性和可靠性。輪速計的速度信息與GNSS和IMU數據融合,可以進一步減少由于環境干擾導致的定位誤差,提高整體系統的魯棒性和精度[8]。
2 測試方法
為了測試自動駕駛車輛的融合感知定位精度,采用RT 3000 V4和移動基站(網絡差分NTU)模式,在開放環境和城市道路環境中測試融合感知定位精度。為了減少環境對系統的影響,增加了輪速計進行對比試驗。
2. 1 測試設備的安裝和調節
2. 1. 1 設備安裝
RT 3000 V4和GNSS天線需安裝到測試車輛上。將RT 3000 V4牢靠固定在車輛地板、車輛中軸線且靠近后軸中心的位置,如圖2所示。另外,在安裝RT 3000 V4時應盡量保證其坐標系與車輛坐標系的軸向一致。同理,將GNSS天線放置在車頂、車輛中軸線且靠近后軸中心的位置。

2. 1. 2 配置RT 3000 V4
首先,配置RT 3000 V4本體坐標系與車輛坐標系的相對關系,將RT 3000 V4測量數據轉化為車輛坐標系下的數據;其次,配置GNSS天線與RT 3000 V4本體坐標系原點的相對位置關系,以方便將RT 3000 V4的定位數據測點從GNSS天線位置轉換為RT 3000 V4坐標原點;最后,設置GNSS差分為NTRIP模式,接收千尋服務傳輸的網絡差分信號,可將RT 3000 V4定位精度提高到2 cm內。將RT 3000 V4定位數據轉換到后軸中心點進行位移輸出,從而實現對自動駕駛車輛感知融合數據的精度進行測量和分析。
2. 1. 3 系統初始化與熱機
直線加速至設定的初始化速度閾值,完成初始化。為防止航向偏移和滑移角偏移,確保盡可能直線行駛。迅速完成15 min熱機,這可以讓RT 3000 V4自行計算并修正GNSS天線角度和RT 3000 V4的角度偏差,從而提升RT 3000 V4整體衛導和慣導的精度。通過熱機后的監控模板可以清楚觀測到定位精度指標。
2. 2 測試過程
試驗分別在開放環境和城市道路環境兩種場景下進行,其中開放環境為無障礙的開放場景,城市道路環境則為包括樹木及高樓的復雜場景。在確認RT 3000 V4定位數據和融合感知定位數據進行時鐘同步和空間同步后,被測車輛開啟自動駕駛模式,在指定路線上行駛,記錄RT 3000 V4定位數據和融合感知定位數據,記錄車輛實時輸出時間信息及相應的經緯度信息,輸出頻率為100 Hz。車輛行駛時間大于2 min,車輛行駛距離大于1 km。
3 試驗結果分析
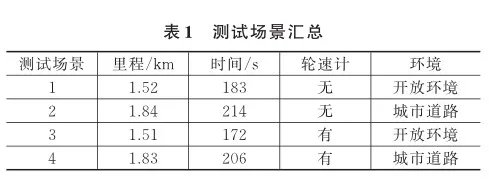
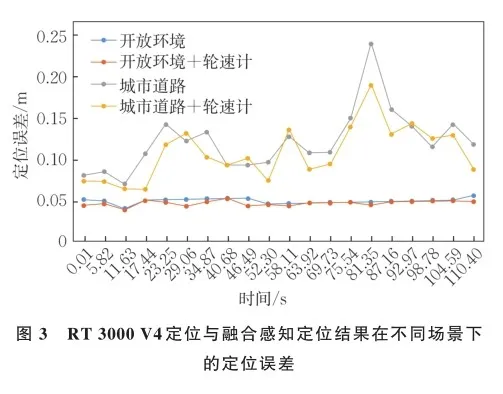
為了驗證測試工作環境對自動駕駛車輛融合感知定位系統精度的影響,試驗分別在開放環境和城市道路環境中進行。另外,為了減少環境對參考真值的測量影響,為RT 3000 V4增加了輪速計進行進一步的測試。表1為試驗在不同測試場景下的匯總情況,圖3為不同測試場景下的自動駕駛融合感知定位系統的定位誤差曲線。
試驗結果表明,無論RT 3000 V4是否使用輪速計,在開放場景下自動駕駛融合感知定位系統與RT 3000 V4的定位誤差都可控制在6 cm以內,但在城市道路下兩者定位誤差的最大值超過15 cm。這表明在城市道路場景,尤其是存在樹木和高樓等復雜測試場景的環境下,自動駕駛融合感知定位系統的定位誤差偏大。
試驗結果也表明,自動駕駛融合感知定位可以將傳統的GPS定位由米級精度提升到厘米級精度。與此同時,在一定程度上,自動駕駛融合感知定位系統會受到復雜工作環境的影響。
4 結語
本文采用融合了GNSS、RTK及IMU技術的RT 3000 V4衛導-慣導組合定位系統,并對自動駕駛車輛的融合感知定位精度進行了測試。由測試結果可以看出,無論RT 3000 V4是否使用輪速計,相較于周邊存在大型建筑物的復雜城市道路場景,自動駕駛融合感知定位系統在開放道路測試場景下都擁有更高的定位精度。雖然GNSS、RTK及IMU技術在驗證測試自動駕駛融合感知定位精度方面具有顯著優勢,但是在城市道路復雜環境下,仍然需要進行衛星信號、網絡RTK基站穩定性、數據同步性的優化工作。
下一步研究工作的重點在于優化GNSS+ RTK+IMU等技術的融合,采用更先進的多傳感器融合技術,提高測試系統的魯棒性和定位精度,提升測試系統在各種環境下的高精度和高可靠性。此外,還應重點研究如何在城市道路復雜的條件下減少環境對測試系統的干擾。
參考文獻
[1] 師小波,趙丁選,孔志飛,等.基于多傳感器信息融合的車輛高精度定位技術[J].中國機械工程,2022,33(19):2381-2387.
[2] ZHANG J, WEN W, HUANG F, et al. GNSS-RTK adaptively integrated with LiDAR/IMU odometry for continuously global positioning in urban canyons[J].Applied Sciences,2022,12(10): 5193.
[3] 戴力源,楊達,李凱,等.基于圖像與高精定位融合數據的封閉場地自動駕駛汽車駕駛測試方法[J].計算機應用研究,2023,40(11):3333-3340,3347.
[4] CUI B, CHEN X, XU Y, et al. Performance analysis of improved iterated cubature Kalman filter and its application to GNSS/INS[J].ISA Transactions,2017,66(1): 460-468.
[5] CHEN Y, TANG J, JIANG C, et al. The accuracy comparison of three simultaneous localization and mapping (SLAM)-based indoor mapping technologies[J].Sensors,2018(18): 3228.
[6] WEN W, HSU L T. Towards robust GNSS positioning and real-time kinematic using factor graph optimization[C]//International Conference on Robotics and Automation. Xi’an: IEEE, 2021: 5884-5890.
[7] 陳鐘,韋嘉賓,黃曉潔,等.輪速計在自動駕駛汽車中的應用[J].汽車測試報告,2023(13):48-50.
[8] 程敏,劉文博,羅作煌.RTK-GNSS融合輪速計定位在電力機器人的應用[J].機器人技術與應用,2021(6):45-48.
