考慮多種坐姿的正面碰撞約束系統參數優化
2024-01-01 00:00:00項晟皓
汽車與新動力 2024年5期
摘要:在車輛遇到危險時,自動緊急制動(AEB)系統的介入會使碰撞事故發生時刻駕駛員處于前傾離位姿態。基于正常坐姿設計的約束系統對不同前傾程度下的駕駛員可能會降低保護效果。為此,進行緊急制動志愿者實車試驗,依此構建包含4種坐姿的離位坐姿約束系統模型,全面考慮不同坐姿,利用modeFRONTIER軟件與MADYMO軟件搭建聯合仿真優化平臺。選取拉丁超立方試驗設計方法進行初始采樣,運用徑向基函數法構建響應面近似模型,利用第二代非支配遺傳算法(NSGA-Ⅱ)得到最優匹配。結果表明:4種坐姿下中國新車評價規程(C-NCAP)得分均有所提高,總得分提高3.8分;優化后的約束系統參數合理有效,對于正常坐姿與不同離位坐姿下的駕駛員均具備較好的保護效果。
關鍵詞:駕駛員損傷;自動緊急制動系統;離位坐姿;約束系統;參數優化
0 前言
隨著自動緊急制動(AEB)系統在國產車輛的普及率不斷提高,相關研究顯示,在AEB系統達到100%的市場滲透率時,中國每年交通事故死亡人數可減少13.2%,受傷人數可減少9.1%。同時,中國配備AEB系統的智能汽車市場滲透率預計在2025年達到34.0%,在 2030年達到60.3%[1]。然而,在事故無法避免的工況中,AEB系統的介入會使車內駕乘人員的姿態發生不同程度的前傾,即處于離位狀態[2],如圖1所示。鑒于此,基于正常坐姿設計的乘員約束系統能否為前傾離位駕乘人員提供足夠的保護效果,以及是否需要考慮不同離位坐姿下的約束系統優化,均需加以研究。
1 離位坐姿約束系統模型構建
首先,設計并開展了車輛緊急制動志愿者實車試驗。在試驗過程中,利用駕駛機器人輸入不同制動減速度曲線,借助車載高清高速攝像機采集志愿者的動態響應。最終,利用計算機視頻處理軟件提取志愿者頭部、肩部等部位的離位數據。
本研究從志愿者實車試驗中選取最小程度離位、中等程度離位與最大程度離位3種典型離位姿態,定義為輕度前傾坐姿、中度前傾坐姿與嚴重前傾坐姿,見表1。依據選取的3種典型離位姿態,采用MADYMO軟件建立并驗證正面碰撞約束系統模型,并對于模型中Hybrid Ⅲ假人進行重新定位,建立了包括正常坐姿(NP)、輕度前傾坐姿(OOP90)、中度前傾坐姿(OOP187)、嚴重前傾坐姿(OOP260)在內的4種坐姿下駕駛員前傾離位正面碰撞約束系統模型,如圖2所示。
對于表1中的4種坐姿進行仿真運算,按照中國新車評價規程(C-NCAP)進行評估,得分見表2。

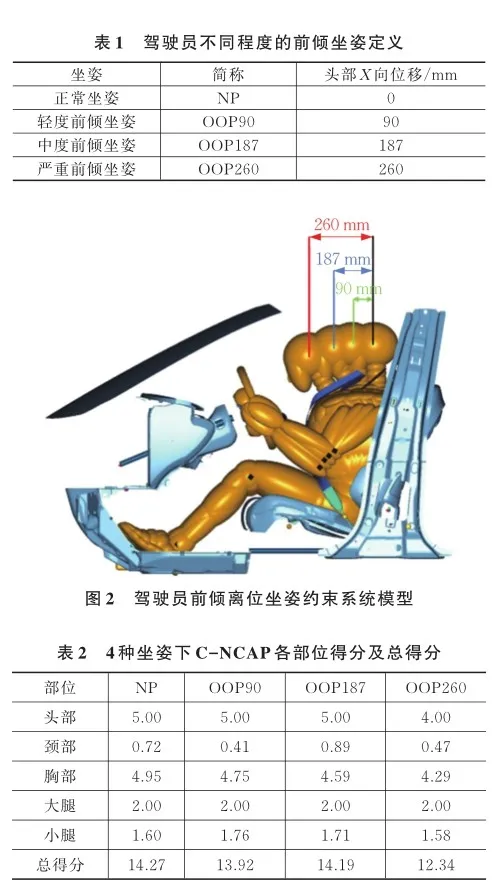
由表2可以看出:正常坐姿、輕度前傾坐姿和中度前傾坐姿下,頭部得分為滿分(5分);但在嚴重前傾坐姿下,由于發生氣囊掃臉而扣1分。在4種坐姿下,頸部失分均較多。胸部失分隨著前傾坐姿的增大而增加。輕度與中度前傾姿態下的得分與正常坐姿得分相比略有減小,而嚴重前傾坐姿下的扣分相對更多。
2 優化平臺設計與建立
約束系統的優化設計具備強非線性特點,且涵蓋多維度的設計參數及人體多個部位的損傷值。如果對假人各部位的損傷值都進行優化,工作量較大,且可能因優化目的不明確而導致突出傷害值的優化效果不佳。同時,數個損傷值的多目標優化由于收斂速度慢、可觀測性差等原因并不適用于本研究。通過為假人各部位合理分配適當權重值進行單目標優化,能夠迅速、有效地獲取直觀的約束系統匹配參數。本文在modeFRONTIER軟件中搭建聯合仿真優化模型,將優化目標選定為4種坐姿下C-NCAP 2024版中正面碰撞對前排Hybrid Ⅲ假人的評分之和。
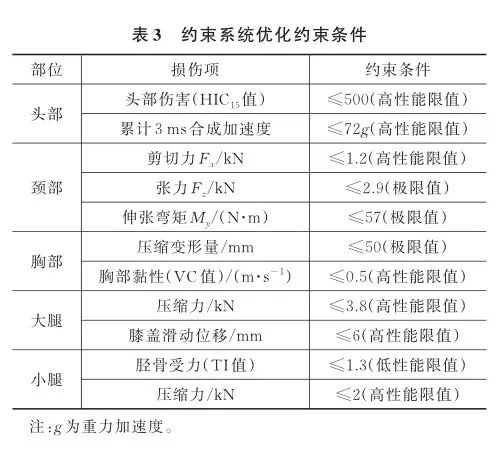
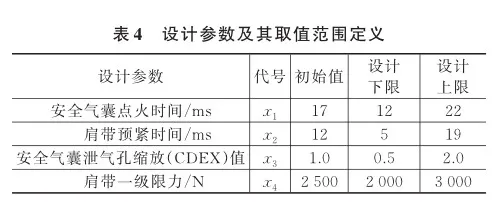
在正常坐姿、輕度前傾坐姿、中度前傾坐姿下,頭部得分為5分;在嚴重前傾坐姿下,頭部損傷值雖在高性能限值之下,但因氣囊掃臉罰分1分,最終得分為4分,且嚴重前傾導致的氣囊掃臉情況無法通過約束系統參數的優化避免。各種坐姿下大腿部位得分為滿分(2分),而頸部、胸部、小腿部位存在不同程度的扣分。對于扣分項,根據插值計算系數以設計目標函數,并將其極限值作為約束條件。同時,為防止優化某些參數減小部分損傷值時,使其他原本未失分項損傷上升過多,將C-NCAP評分中未扣分項損傷值的高性能限值作為優化過程的約束,以防止導致其他項目扣分。最終優化約束條件見表3,設計參數及其取值范圍定義見表4。
3 試驗設計
目前,在約束系統仿真優化中較為常用的試驗設計方法有全因子法、正交法、均勻試驗法、拉丁超立方法等。拉丁超立方試驗設計的基本原理是先將設計空間進行均勻等分劃分,然后在每一個劃分空間中隨機選取采樣點,最后將各個空間中選取的采樣點集合起來作為最終的初始探索參數組合。該方法可以保證樣本點的均勻性和隨機性。相較于其他幾種方法,拉丁超立方法具備以下顯著優勢:① 拉丁超立方法能夠在有限的采樣點下將空間進行有效填充;② 拉丁超立方法具備擬合二階甚至更高階的非線性響應;③ 拉丁超立方試驗設計可以研究更多設計水平的組合。
拉丁超立方法與本研究中約束系統參數優化的特征較為吻合,因此本研究采用拉丁超立方法進行試驗設計,并確定樣本點數目為30個。該方法下各參數的試驗設計(DoE)值見表5。
4 響應面代理模型與智能優化
4. 1 響應面代理模型的構建
目前,在科學研究與工程應用中常用的響應面代理模型有多項式擬合法、神經網絡算法、支持向量回歸法、Kriging代理模型法、徑向基函數法等[3]。其中,多項式擬合法在擬合高度非線性函數時具有局限性,神經網絡算法需要大規模的訓練數據集和大量計算資源,并且自身學習速度較低。因此,初步選取支持向量回歸法、Kriging代理模型法、徑向基函數法作為本研究中近似模型代理的方法,并根據三者的擬合程度高低選取最終近似代理模型方法。基于構建的30組拉丁超立方采樣點(見表5),將其中70%設置為訓練集,30%設置為驗證集。以4種坐姿下C-NCAP總得分為目標,選取上述3種方式構建響應面并進行擬合程度的驗證,得到的擬合系數(R2)對比見表6。
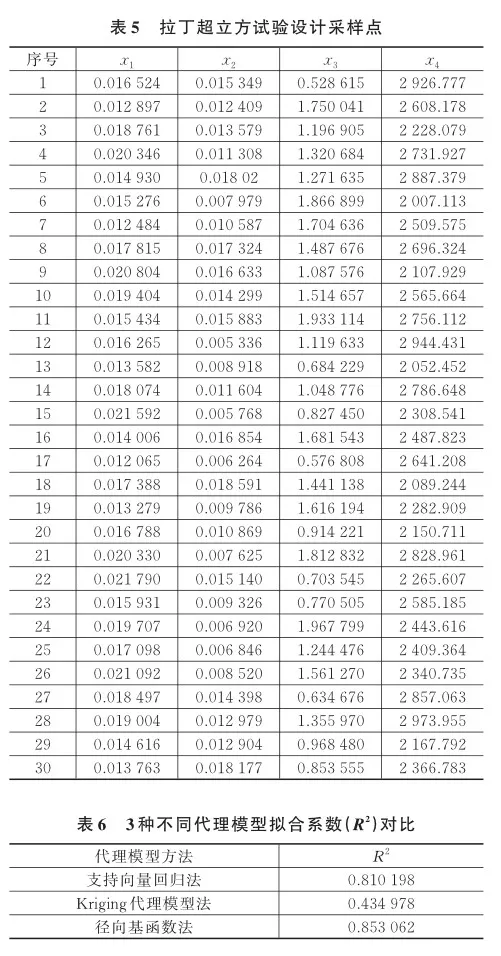
由表6可以看出:對于4種坐姿下的總得分,徑向基函數法的擬合系數最高。因此,本文最終采用徑向基函數法來構建設計變量的響應面代理模型。
由假人C-NCAP總得分與各設計參數之間的響應面分析可知,總得分隨著各參數之間的改變而變化較為復雜,但研究中依然可以憑借響應面曲線判斷不同變量之間的交互影響作用以及對假人4種坐姿下總得分的影響趨勢。因此,本文選用恰當的優化算法,針對優化目標對約束系統設計參數進行進一步優化與匹配。
4. 2 智能優化算法設計優化
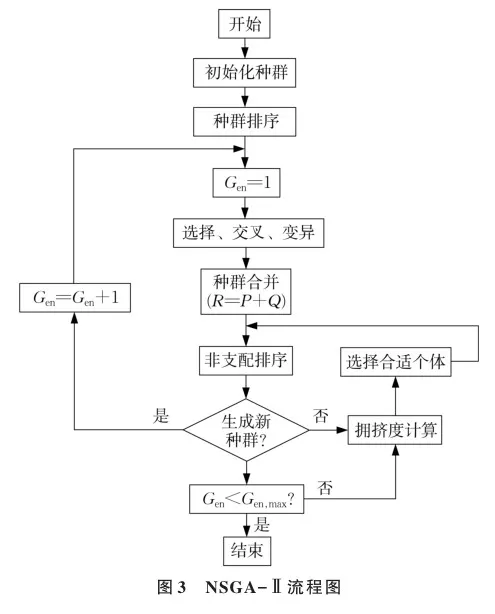
目前,許多智能算法在學術研究與工程應用界得到應用,其中常用的算法有粒子群算法(PSO)、模擬退火算法(SA)、遺傳算法(GA)等。PSO的搜索能力有限,最終解可能只是局部最優而并非全局最優。SA的缺點是退火速率較難控制,退火速率設置快則難以找到最優解,退火速率設置慢則計算收斂用時過長。而第二代非支配遺傳算法(NSGA-Ⅱ)不僅保留了全局搜索能力,與非線性、高維度問題相適配[4],而且降低了算法的計算復雜度,提高了傳統算法的魯棒性[5],與本研究較匹配。因此,選取該方法,其主要思路與步驟如圖3所示,優化后約束系統各參數取值見表7。其中,Gen為遺傳代數,Gen,max為最大遺傳代數,P為父代種群,Q為子代種群,R為合并后種群。

在各種坐姿的最優約束系統參數組合下,氣囊點火時刻提前了約1.81 ms,肩帶預緊時刻提前了約4.22 ms,泄氣孔CDEX值取1.867 06,代表泄氣孔尺寸半徑由30 mm增大至40.99 mm,增大幅度為36.64%,一級限力減少約493 N。肩帶預緊時刻提前能夠更好地約束假人上半身,防止其產生更嚴重的前傾姿態,一級限力降低能夠有效減少胸部壓縮量。而安全氣囊點火時刻提前與泄氣孔尺寸增大均能降低安全氣囊對于胸部、頭部的接觸力,使得各種坐姿下頸部與胸部損傷得到減輕。
5 各種坐姿下優化效果驗證
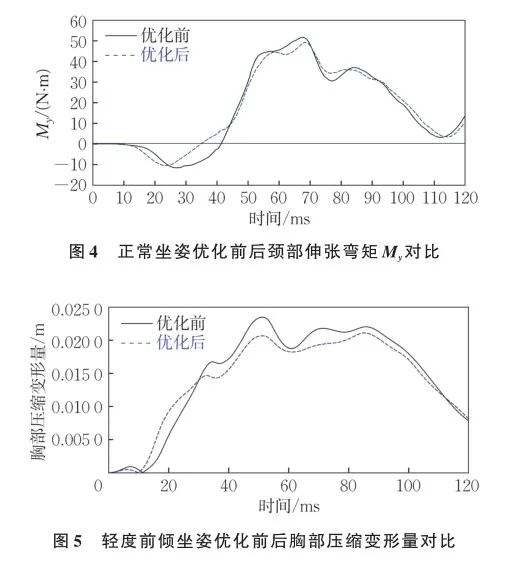
將NSGA-Ⅱ優化后的約束系統參數代入MADYMO軟件中進行4種坐姿下的仿真。4種坐姿下部分損傷優化前后曲線對比如圖4~圖8所示。
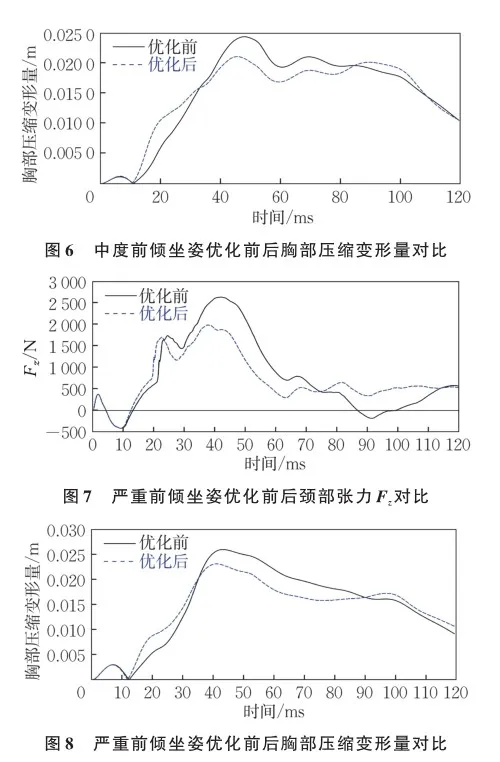
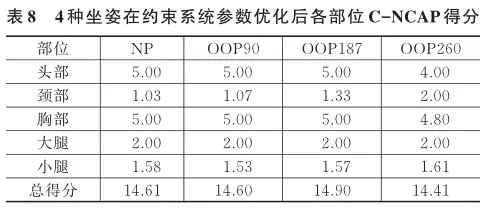
由圖可知,經過NSGA-Ⅱ優化后,不同坐姿下各扣分項損傷值整體均得到降低,優化效果較好。4種坐姿在約束系統參數優化后各部位C-NCAP得分見表8。
對比表2和表8可知:經過NSGA-Ⅱ優化得到的約束系統最優參數對胸部得分與頸部得分的優化效果較好,而對小腿部位得分的改善則一般;4種坐姿下得分分別增加了0.34分、0.68分、0.71分、2.07分,提升幅度分別為2.38%、4.89%、5.00%、16.77%;4種坐姿下C-NCAP總得分由54.72分提升至了58.52分,增加了3.8分,提升幅度為6.94%。這說明優化后的約束系統參數合理有效,對不同坐姿下的駕駛員均具備較好的保護效果。
6 結語
全面考慮4種坐姿,利用modeFRONTIER軟件與MADYMO軟件搭建了聯合仿真優化平臺。初步選取支持向量回歸、Kriging近似代理模型法、徑向基函數法3種方法構建近似模型,最終根據擬合系數的大小選取徑向基函數法作為本研究中的響應面代理模型,其對于4種坐姿下C-NCAP總得分的擬合系數為0.853 062,擬合程度較好。選取NSGA-Ⅱ作為本研究中的優化算法,最終得到4種坐姿下約束系統參數的最優匹配。
相比于原有參數,氣囊點火時刻提前了約1.81 ms,肩帶預緊時刻提前了約4.22 ms,泄氣孔尺寸半徑由30 mm增大至40.99 mm,一級限力減少約493 N。在該參數組合下,4種坐姿下得分分別增加0.34分、0.68分、0.71分、2.07分,說明優化效果較好。優化后的約束系統參數合理有效,對不同坐姿下的駕駛員均具備較好保護效果。同時也表明了針對現有約束系統參數進行優化與匹配對于提升AEB系統介入的各種坐姿下汽車的安全性具備可行性。
參考文獻
[1] 中華人民共和國國家統計局.交通事故數據[EB/OL].[2023-12-26].https://data.stats.gov. cn/easyquery.htm?cn=C01.
[2] 李月明,王鵬翔,張毅,等.自動緊急制動對約束系統保護功能影響的研究[J].汽車技術,2022(10): 16-23.
[3] 王珂.基于AEB信號的集成式約束系統仿真與優化分析[D].重慶:重慶理工大學,2018.
[4] 王達.針對多目標優化的精英保留非劣排序遺傳算法[J].河南化工,2005(4):9-11.
[5] 高媛.非支配排序遺傳算法(NSGA)的研究與應用[D].杭州:浙江大學,2006.
