一種基于人工智能的緊急轉向干預避撞功能算法
2024-01-01 00:00:00郭曉麗
汽車與新動力 2024年3期
關鍵詞:人工智能

關鍵詞:人工智能;主動安全;軌跡規劃;決策控制
0 前言
截至2023 年12 月底,我國大陸地區機動車保有量已達4.35 億輛,汽車駕駛總人數達到4.63 億人[1]。受地理環境及經濟發展等因素影響,我國的人口分布不均,帶給行車的影響是交通環境變得更為復雜,而不斷發生的道路交通事故也給人民群眾帶來了巨大損失。據統計,僅2022 年我國道路事故死亡人數約為6.06 萬人[2],因此提高車輛行駛的安全性意義重大。主動安全作為提高汽車安全性的重要手段正越來越受到全球各地區的重視,同時,多個針對車輛主動安全的評測法規也相繼推出。
國內外學者對復雜路口場景的汽車主動安全已有大量研究。ARIKERE 等[3]為交叉路口中左轉智能車輛提出了一種緊急避讓對向直行車輛的避撞策略。祝琳等[4]將分級制動策略引入到自動緊急剎車(AEB)控制中。HILLENBRAND 等[5]針對前向碰撞提出了多級碰撞緩解方案,并在追尾、切入和交叉路口場景下進行了仿真測試,但其算法算力消耗大。PATEL 等[6]設計部署了基于DeepSORT 算法跟蹤框架的實時人工智能檢測模型YOLO-v5,該模型能對交叉路口中車輛交錯時的碰撞時間(TTC)和后侵入時間(PET)進行估計。王錕等[7]提出了一種基于實時軌跡檢測的交叉路口行人過街風險評估方法,在該方法中通過目標檢測融合框架實現對人-車沖突的檢測,進而對人-車沖突風險指標進行評估。但由于算力及功能安全的限制,上述基于人工智能的算法框架難以完成量產部署。
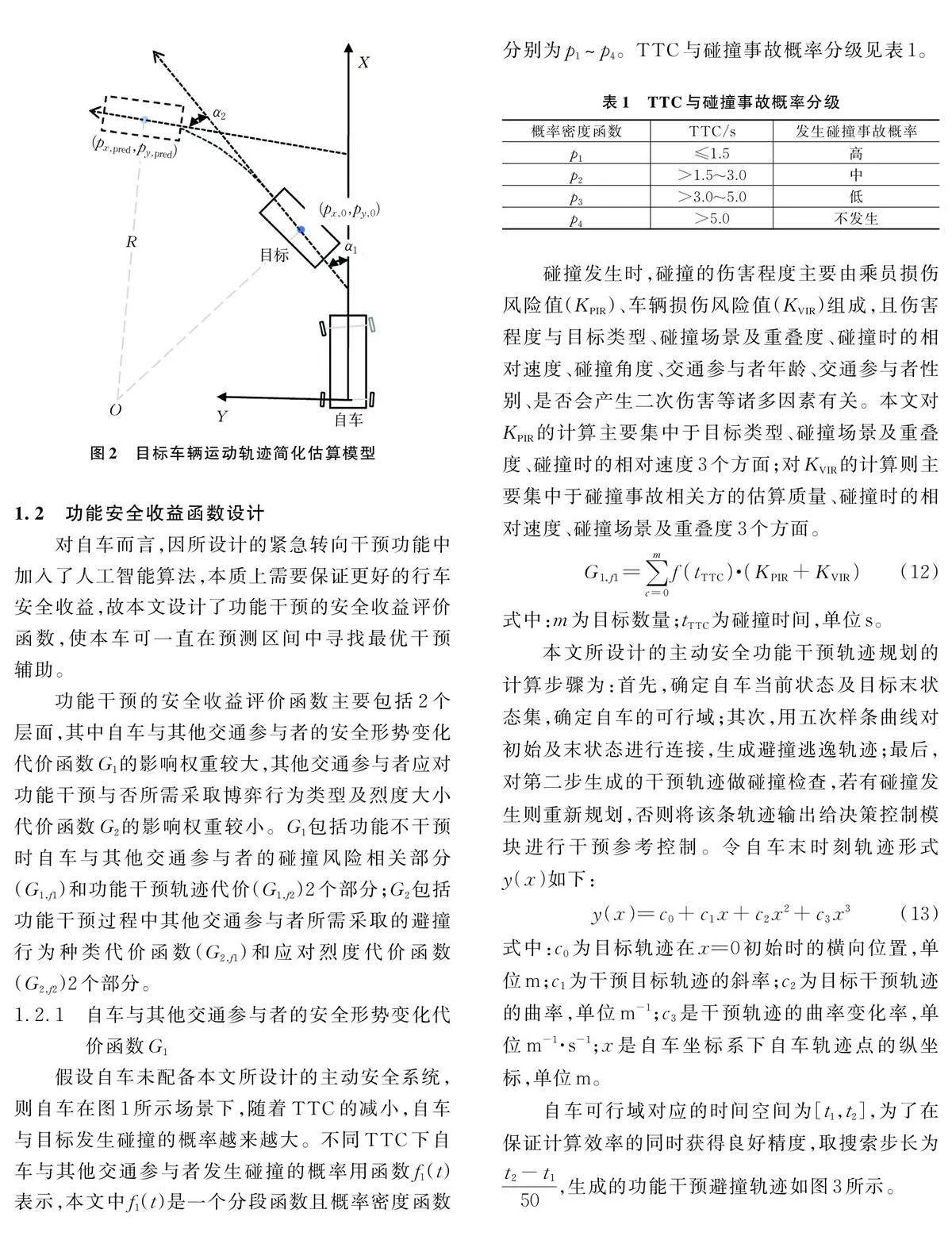
1 風險評估及安全最優收益函數設計
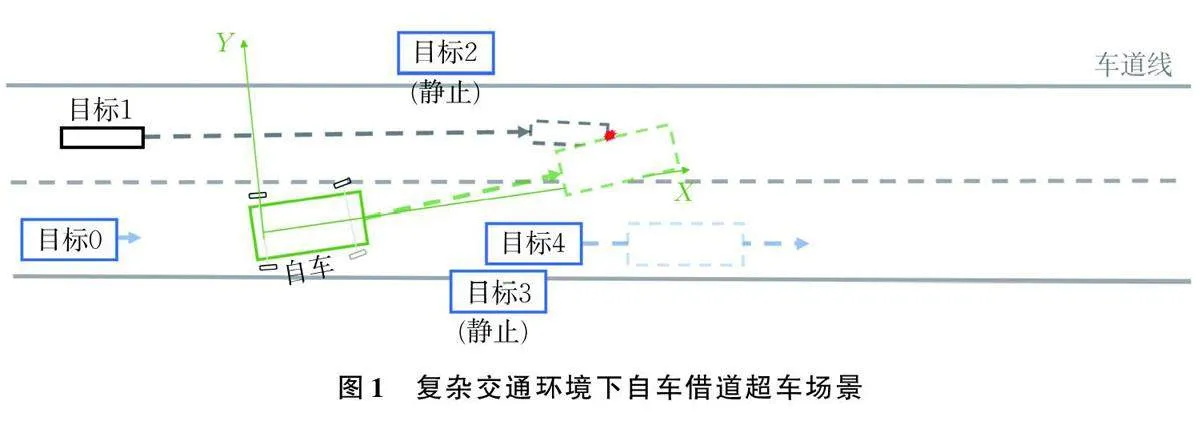
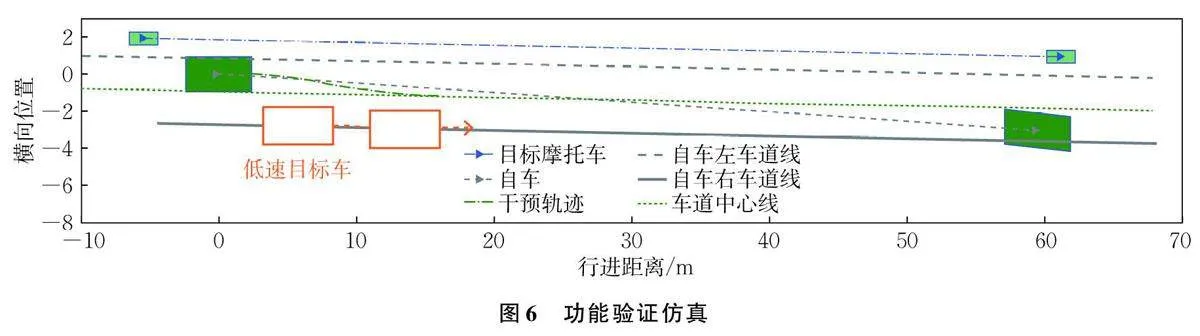
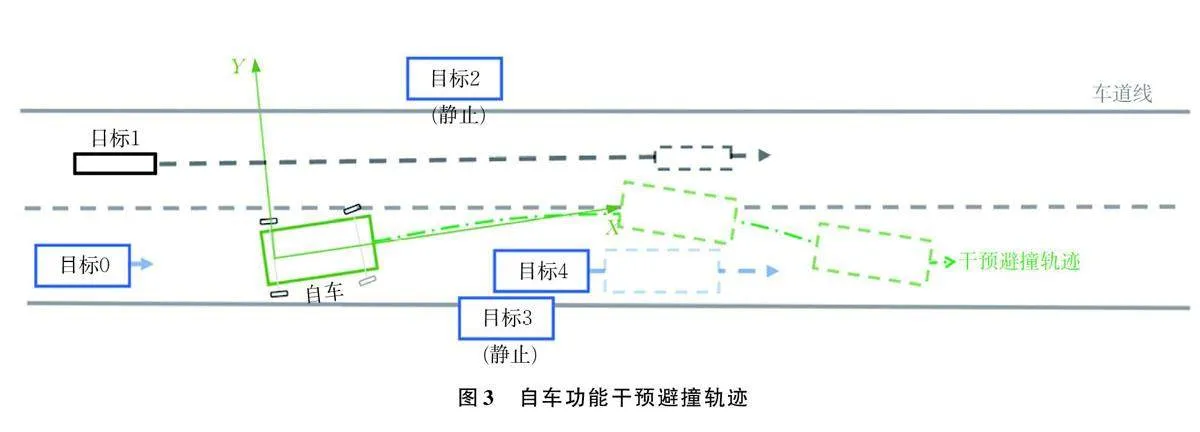
在日常行車過程中,駕駛員經常會遇到復雜交通環境下自車借道超車場景,如圖1 所示,此處自車速度為80km/h,本車道內自車正前方有一低速同向行駛的目標4,自車駕駛員以某一橫向速度(如1m/s)向左借道對向車道加速超車(目標4)。當駕駛員因為疲勞或分心,尤其是較長時間使用L2 級巡航類駕駛輔助功能,如領航輔助(NOP)后,該情況下自車駕駛員并未意識到其將與左側車道正常行駛的目標1(速度比自車高的摩托車)發生碰撞。
常規的L2級巡航類駕駛輔助功能為了不違背駕駛員的駕駛意圖,在該情況下并不會因為可能發生的碰撞而阻止駕駛員進行上述變道操作,相反,因駕駛員主動操作程度較高,該功能會暫時進入待命(standby)模式。另外,由于無法準確得到自車道及相鄰車道目標(如目標4、目標1)的反應,在自車變道趨勢[4]發生時(如打轉向燈換道),目標車輛可能采取加速或減速、打方向等操作來影響自車行駛安全。
本文基于上游感知模塊輸出的環境信息,實時預測自車及其他目標軌跡,設計了基于自車及其他交通參與者、靜態環境信息等的碰撞風險計算邏輯,實時計算風險及功能干預安全收益函數,最終決策控制模塊基于實時交通狀態對避撞動作執行進行閉環控制。決策時根據人工智能算法來優化自車的行車行為,獲得主動安全系統干預與否及操作的最優解。
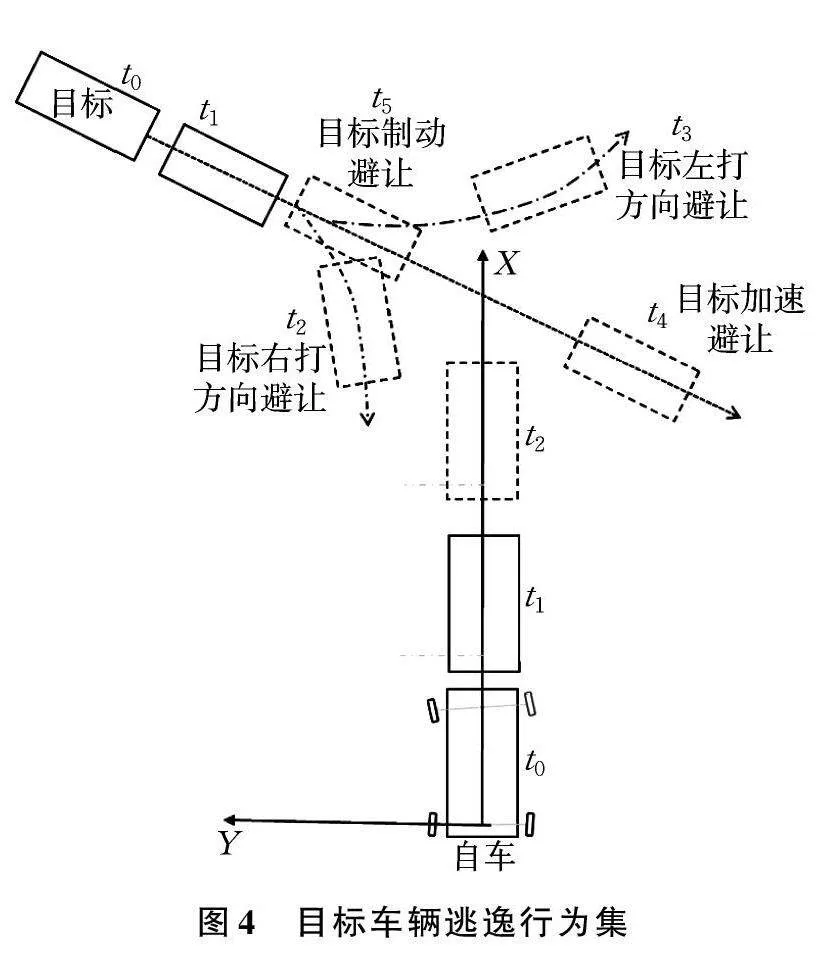
1. 2. 2 其他交通參與者所需博弈行為及行為烈度代價函數G2
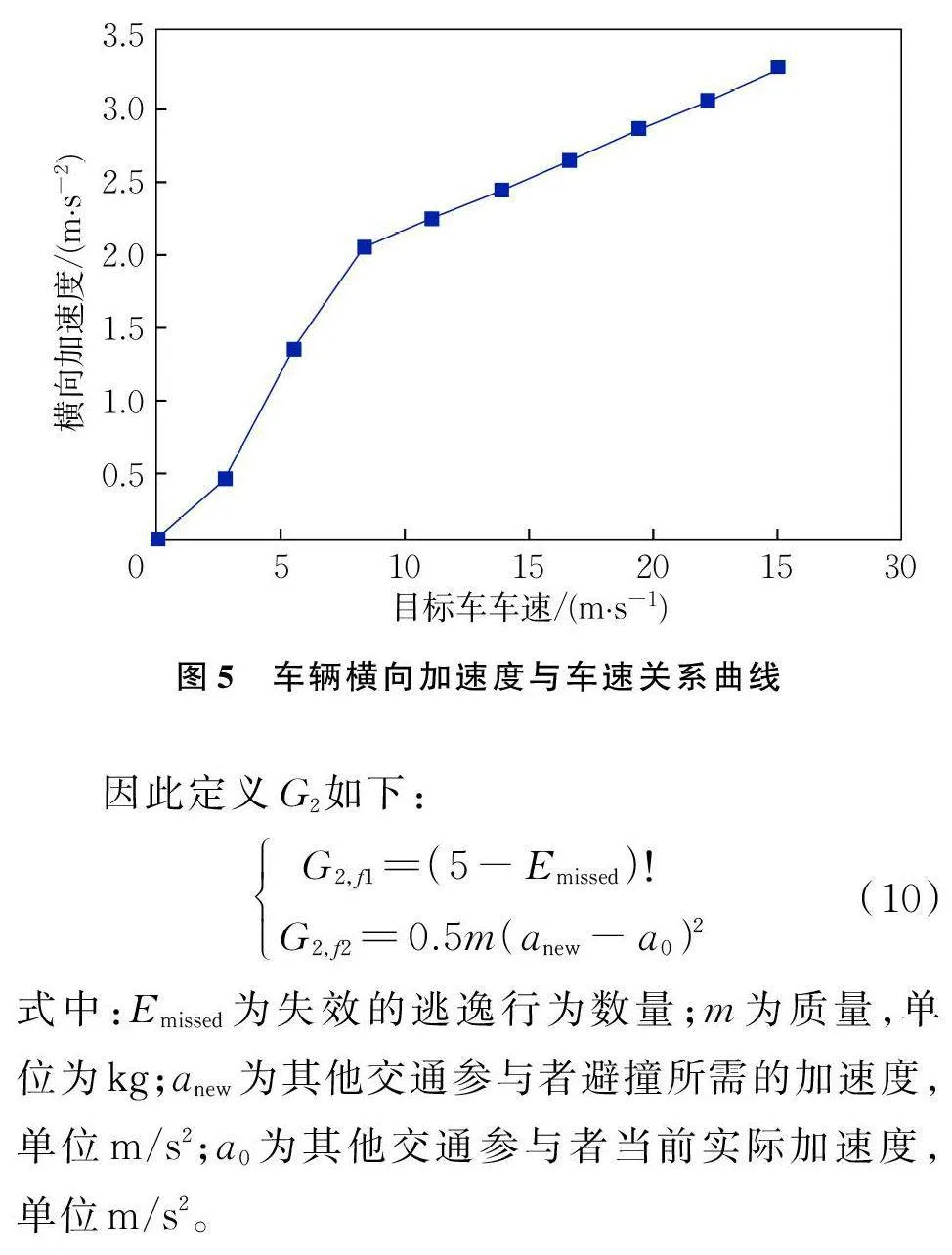
其他交通參與者采取措施并以期與自車避撞的行為集包括:加速、減速、左打方向、右打方向(如圖4 所示),且不同情況下可采取的有效逃逸操作類型及幅度大小是不同的(如圖5 所示),存在一個最優避讓操作。最優避讓是指其他交通參與者相對于其當前狀態,需要采取的避撞行為種類不止一種且其需要的能量最小。因此,若功能干預過程留給其他交通參與者的逃逸避撞行為可能性越多、其他交通參與者所需采取的避撞行為幅度越小、逃逸避撞操作越緩和,則代表功能干預過程越安全,功能干預實時交通擾動影響代價越小,功能干預的安全收益就越高。
2 功能驗證
采用本文設計的人工智能主動安全輔助算法,基于當前目標平臺傳感器和架構配置,使用二自由度車輛動力學模型[8]進行仿真,結果如圖6 所示。由圖6 可知:所設計的人工智能行車主動安全干預輔助算法可在保證自車安全的前提下減小對其他交通參與者的通行影響。
3 結語
本文從碰撞風險評估、軌跡規劃、運動決策控制等方向出發,設計了一種可以提升復雜環境下行車安全的轉向干預避撞的智能算法。建立自車和目標物的時空軌跡預測模型,并實時計算自車碰撞風險大小及最優避撞軌跡。所開發的智能算法優化了自車干預過程對整個交通環境下各交通參與者的安全收益影響,進而保證了功能干預的正向安全收益。仿真測試驗證了所提出的風險評估及避撞決策方法的有效性。
猜你喜歡
西安航空學院學報(2022年2期)2022-07-04 07:45:42
汽車零部件(2020年3期)2020-03-27 05:30:20
表面工程與再制造(2019年1期)2019-05-11 08:52:04
商界(2019年12期)2019-01-03 06:59:05
家庭影院技術(2018年9期)2018-11-02 05:31:34
IT經理世界(2018年20期)2018-10-24 02:38:24
通信電源技術(2018年3期)2018-06-26 06:33:30
軍營文化天地(2018年1期)2018-02-10 05:19:25
小康(2017年16期)2017-06-07 09:00:59
學與玩(2017年12期)2017-02-16 06:51:12