基于傳遞函數分析的汽車動態載荷預測方法
2024-01-01 00:00:00唐俊
汽車與新動力 2024年3期
關鍵詞:汽車動態載荷;傳遞函數;動態載荷譜;載荷譜預測;虛擬試驗場
0 前言
通過平臺化開發的汽車,其系列產品之間的載荷譜具有一定的相關性,主要原因在于載荷的傳遞路徑保持不變,但整車傳遞函數會根據平臺的結構參數、零件性能參數的不同而發生變化。在整車耐久性規范開發的前期,在沒有樣車時,根據同平臺開發的汽車產品載荷譜,并結合整車的傳遞特性,可預測新產品的載荷譜。
李飛等[1]針對汽車動態載荷預測方法進行了研究。基于整車兩自由度振動模型,通過對路面隨機激勵傳遞函數進行分析,可獲取整車參數或狀態改變后簧上與簧下的傳遞函數比,基于此,可對汽車不同狀態下的動態載荷進行預測。基于虛擬試驗場的耐久性載荷譜對載荷譜預測方法進行驗證,結果發現可以有效預測不同載重狀態下的汽車動態載荷譜。本文提出了一種可預測汽車動態載荷譜的方法,以期為汽車平臺化開發時在已有平臺載荷譜的基礎上確定相關系數提供理論依據。
1 汽車動態載荷預測方法
1. 1 汽車隨機激勵傳遞分析
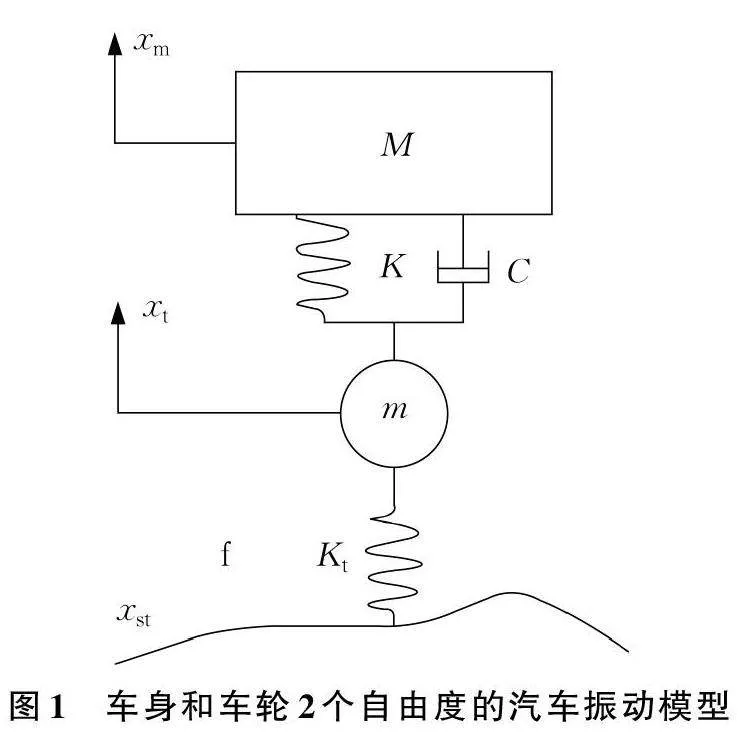
采用具有車身和車輪2 個自由度的汽車振動模型進行分析,汽車在行駛過程中所受到的路面隨機激勵見圖1。其中,K 為懸架剛度;C 為懸架阻尼器的阻尼系數;Kt為輪胎剛度;M 為簧上質量;m 為簧下質量;xm 為簧上質量車身位移;xt 為簧下質量軸頭位移;f 為地面作用到輪胎接地點的垂向力;xst為路面起伏量。
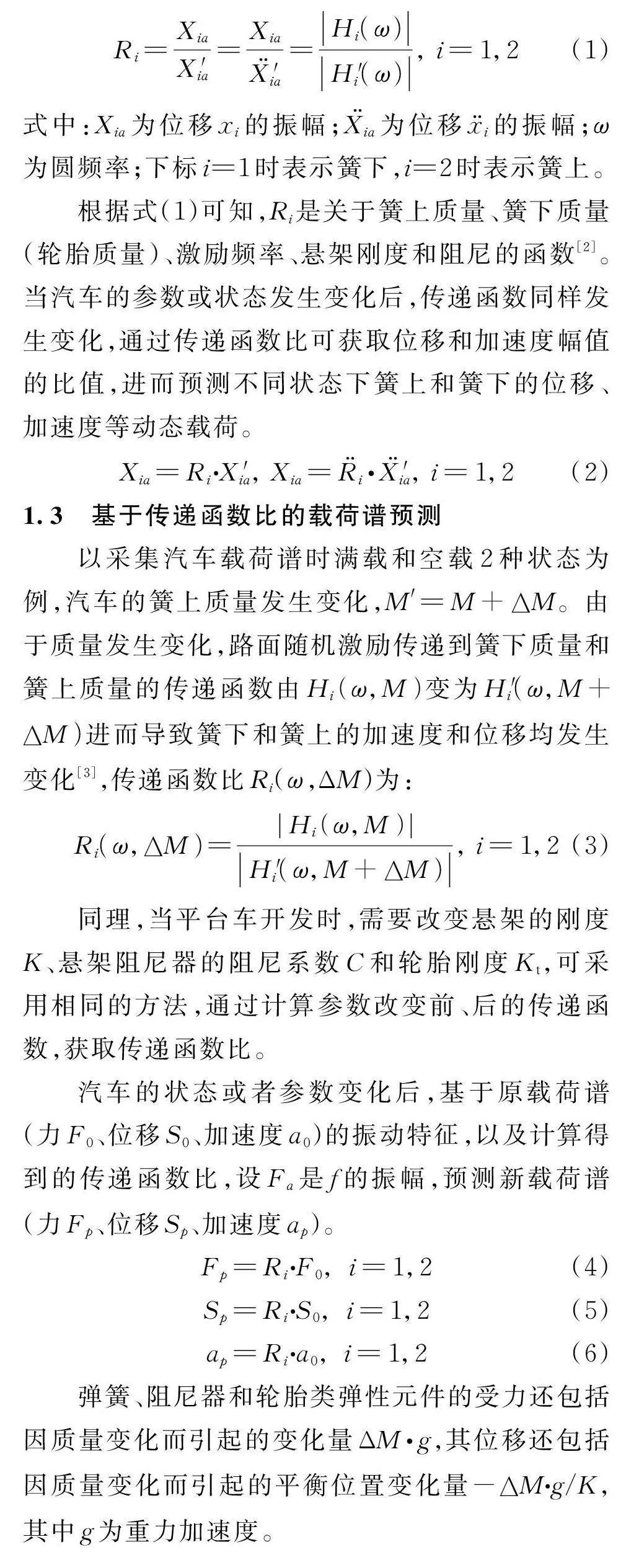
1. 2 傳遞函數比
汽車的參數或狀態(簧上質量、簧下質量、激勵頻率、懸架剛度和阻尼)發生變化后,路面隨機激勵傳遞到簧下質量和簧上質量的傳遞函數由Hi( ω)變為Hi′( ω),進而導致簧下和簧上的加速度和位移均發生變化。定義傳遞函數比Ri為:
2 基于虛擬路面的耐久性載荷預測方法驗證
2. 1 驗證模型與工況
采用基于虛擬試驗場的載荷譜提取方法,使整車在預設的虛擬路面上行駛,可獲取不同狀態下汽車部件所受到的載荷譜。基于某個狀態下的載荷譜和動態載荷譜預測方法,可以預測其他狀態下的載荷譜,并將其與載荷譜仿真結果進行對比驗證。
整車模型以初始速度為13.3 m/s 在長為105 m的虛擬路面上行駛,在路面中部存在幅值為0.01 m、波長為1.2 m 的正弦激勵,路面長為40 m,寬為2 m,路面摩擦系數為0.9。
以載重狀態變化為案例,分別分析整車模型在空載、半載和滿載條件下簧上和簧下載荷譜的響應情況,其中半載ΔM=250 kg,滿載ΔM′=400 kg。采用所提載荷譜預測方法,基于空載狀態獲取載荷譜,預測半載和滿載狀態下的載荷譜,并將其結果與仿真載荷譜進行對比,以驗證所提方法的準確性。
2. 2 傳遞函數比曲面
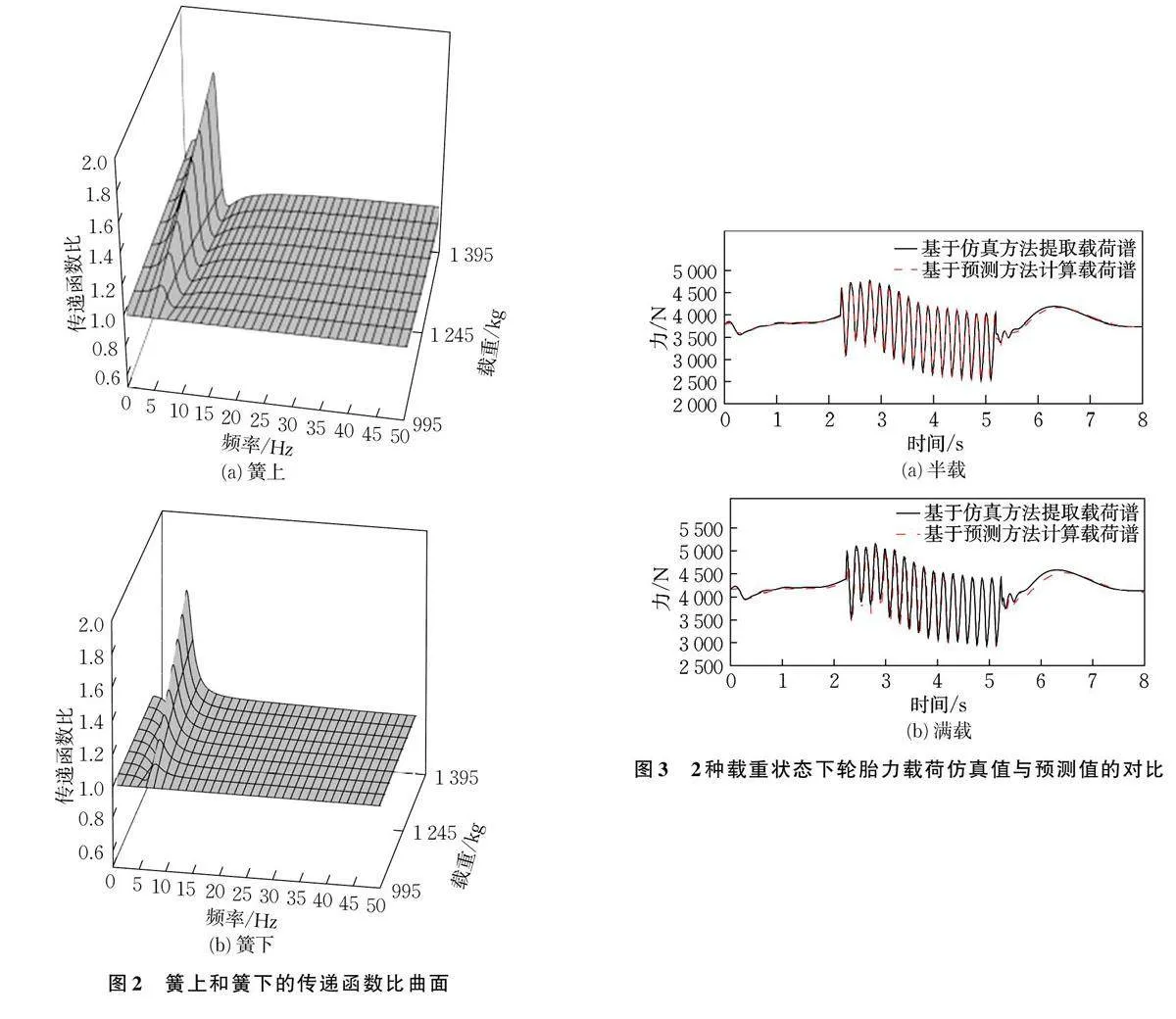
當確定整車懸架剛度、阻尼、簧下輪胎剛度等參數后,傳遞函數比是關于載重質量和路面激勵頻率的函數。路面激勵頻率一般在0~50 Hz 內,載重分為空載、半載和滿載3 種狀態。在不同載重狀態下,簧上和簧下的傳遞函數比隨路面激勵頻率的變化情況如圖2 所示。
由圖2 可知,整車處于空載狀態時,簧上和簧下的傳遞函數比均為1。當整車為半載和滿載時,簧上傳遞函數比呈先增大后減小的趨勢,最終穩定在1 附近;簧下傳遞函數比呈先減小后增大的趨勢,最終也穩定在1 附近。在路面隨機激勵下,簧上和簧下的傳遞函數比峰值分別出現在4.8 Hz、6.5 Hz 頻率處,表明傳遞函數比對這2 個頻率下的激勵尤為敏感。
2. 3 載荷譜預測
整車以初始速度為13.3 m/s 在正弦路面上行駛,加速達到最大速度(13.8 m/s)。路面的激勵頻率可通過ω = v λ 計算得到,其中v 為駕駛速度,λ為路面波長。由于速度在一定范圍內變化,因此基于路面的波長和駕駛速度,可以得到路面的激勵頻率在5.4 Hz 附近。
在確定路面激勵頻率和載重狀態后,在傳遞函數比曲面上找到相應的傳遞函數比Ri(ω,ΔM)。為了對耐久性載荷譜進行保守估計,采用在路面激勵頻率范圍內較大的傳遞函數比進行載荷譜預測。
基于所提載荷譜預測方法,半載和滿載狀態下載重變化分別為ΔM=250 kg 和ΔM′=400 kg。在半載和滿載狀態下,簧下的傳遞函數比分別為0.9749和0.9685,簧上的傳遞函數比分別為1.174 1和1.1110。
2. 4 結果與分析
2. 4. 1 簧下輪心垂向力預測與驗證
基于虛擬路面分析得到的半載和滿載狀態下輪心垂向力載荷譜與基于預測方法得到的輪胎力見圖3。
由圖3 可知,在半載和滿載2 種狀態下,輪胎力載荷仿真值與預測值的吻合程度較高,兩者幅值基本保持一致。2 種載重狀態下,基于仿真方法得到的載荷譜相比預測曲線有所滯后。主要原因在于預測載荷譜是在空載狀態下仿真載荷譜的基礎上通過線性變化得到的,當載重發生變化后,汽車懸架系統的阻尼特性將發生變化,從而導致載荷譜仿真曲線比預測曲線有所滯后。
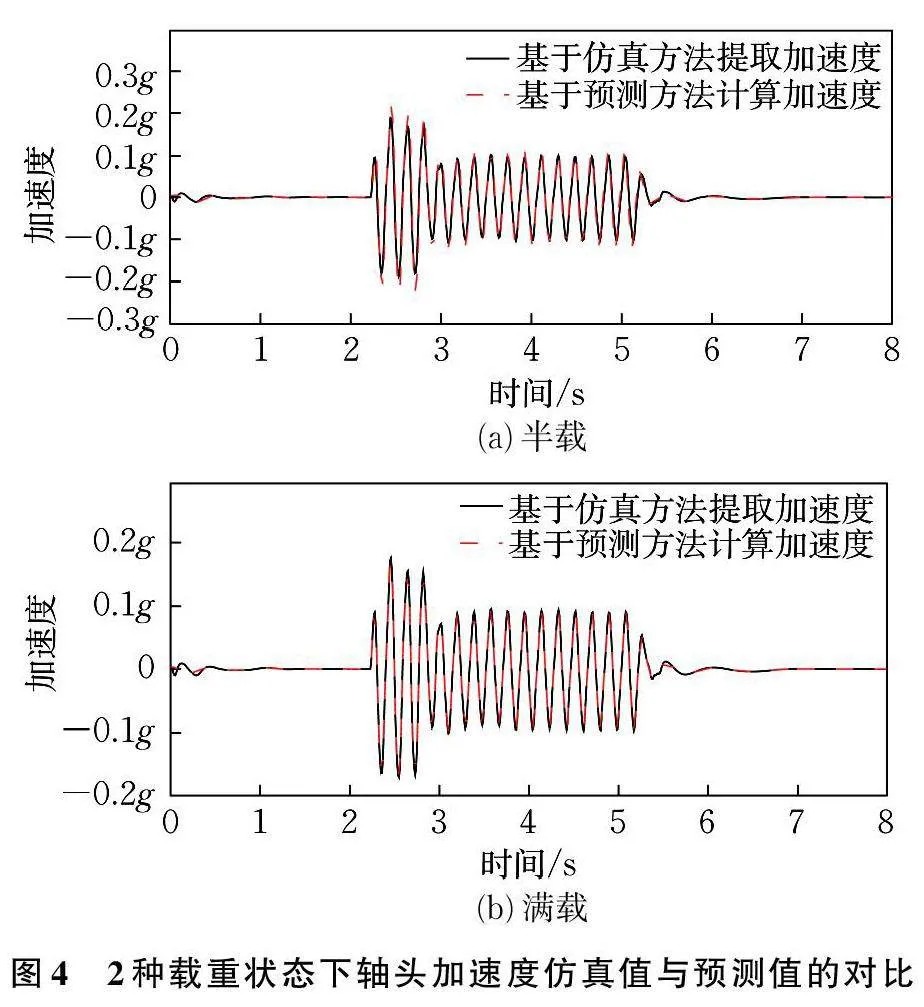
2. 4. 2 簧下軸頭加速度預測與驗證
基于虛擬路面分析得到的半載和滿載狀態下軸頭加速度與基于預測方法得到的加速度對比如圖4 所示。
由圖4 可知,在半載和滿載2 種狀態下,軸頭加速度仿真值與預測值的吻合程度較高,兩者幅值基本保持一致,同樣存在相位滯后現象。主要原因在于整車質量的變化引起汽車懸架系統的阻尼特性發生變化,導致載荷譜仿真值比預測值有所滯后,其滯后程度取決于阻尼的變化程度。對預測載荷譜相位進行修正時,需要輸入真實的阻尼特性,則可以消除滯后現象。
3 結論
采用兩自由度模型,分析了整車在不同載重狀態下簧上和簧下的傳遞函數比。基于汽車某狀態下所采集到的載荷譜和傳遞函數比,可預測汽車其他狀態下的動態載荷。根據理論分析和基于虛擬路面的方法驗證,可得到如下結論:
(1) 傳遞函數比是關于簧上質量、簧下質量、路面激勵頻率、懸架剛度和阻尼的函數。當汽車的參數或狀態發生變化后,傳遞函數同樣發生變化,根據傳遞函數比可預測汽車部件的動態載荷譜。
(2) 基于虛擬試驗場載荷譜提取的仿真方法,驗證了汽車在不同載重狀態下動態載荷譜預測方法的有效性。
(3) 在半載和滿載2 種載重狀態下,由于質量的變化引起汽車懸架系統的阻尼特性發生變化,導致載荷譜仿真值比預測值有所滯后。